 電子發燒友App
電子發燒友App


最好的電機是滿足應用要求的電機。然而,當伺服電機和步進電機都滿足定位應用的基本要求時,對這兩種技術有更深入的了解以做出明智的決定就很重要了。
在這篇博文中,我們將總結伺服電機系統和步進電機系統之間的區別。
讓我們從快速比較這兩種電機技術開始。
|
伺服電機 | |
| 優點 | 優點 | |
|
良好的低速扭矩 沒有調整,沒有狩獵 緊湊的電機尺寸 高性價比 |
良好的高速扭矩 可用的峰值扭矩 連續工作 功能齊全 |
|
| 缺點 | 缺點 | |
|
高速扭矩小 有限的工作周期 無峰值扭矩 通常以開環方式運行 |
需要調整 僅適用于反饋 打獵 成本 |
雖然伺服電機和步進電機都在轉子中使用永磁體,并且需要驅動電路才能運行,但它們的設計存在根本差異,從而導致性能差異。
電機設計
可以命令步進電機移動到某個位置,停止,然后保持,而伺服電機需要通過編碼器反饋“尋找”目標位置。您會注意到的第一個主要區別是伺服電機對編碼器的要求增加了電機長度。
第二個主要區別是極數。這里討論的磁極是“磁極”,可以定義為轉子上的北極或南磁極。這些磁極提供特定的穩定點,來自定子的磁通量將與轉子相互作用。
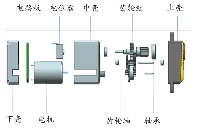
要了解步進電機和伺服電機之間的極數差異,我們需要更深入地了解每種電機設計。下圖左圖為步進電機的構造,下圖右圖為轉子和定子的剖面圖。
步進電機
?
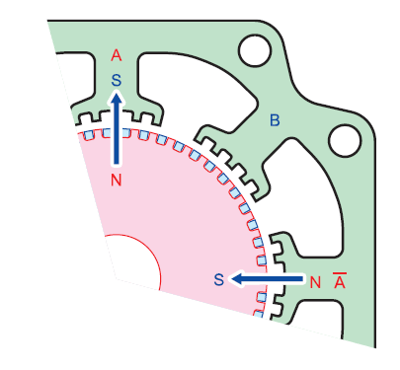
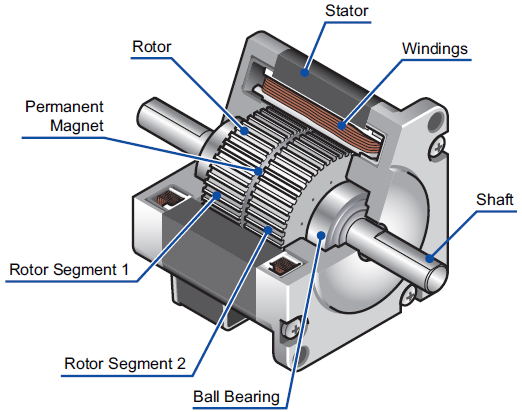
步進電機設計使用夾在兩個帶齒轉子杯之間的軸向磁化稀土永磁體。通過對永磁體進行軸向磁化,使兩個轉子杯的齒成為極性相反的磁極。一個轉子杯可以有 50 或 100 個齒,兩個轉子杯以半個齒距傾斜。兩個轉子的齒在右上圖中以藍色和紅色顯示(如果您從軸側看)。對于步進電機,兩個轉子杯上的每個齒都成為一個極點。
伺服電機
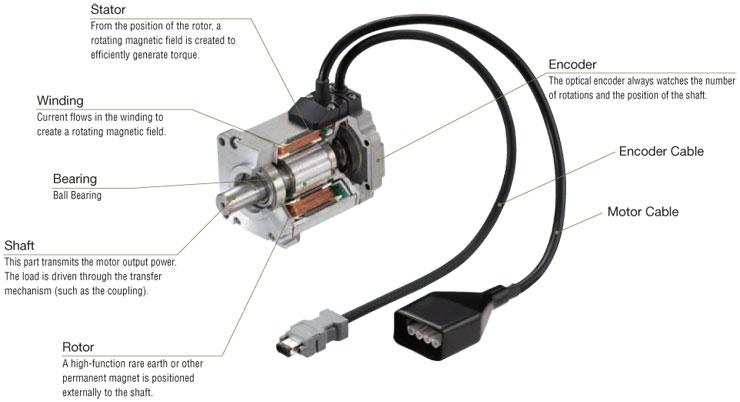
伺服電機(如上所示)使用徑向磁化轉子而不是齒(如下所示),這是伺服電機極數明顯減少的主要原因。極數少還需要使用編碼器反饋來最大程度地減少誤差。
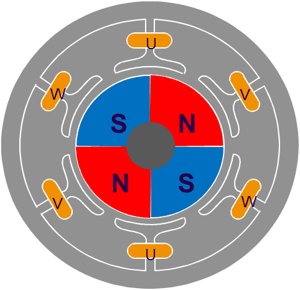
伺服電機設計通常使用 2~8 極轉子和 3 相定子(U、V、W)。它的轉子采用分段永磁體徑向磁化,而不是像步進電機那樣軸向磁化。
右側顯示了 4 極轉子和 6 極定子設計的示例。
如您所見,由于缺少齒,伺服電機提供的極數明顯少于步進電機。
由于絕對編碼器的要求,伺服電機需要更多的空間。較少的極數使其能夠在更高的速度下產生更高的扭矩。步進電機可以在沒有編碼器的情況下開環運行,因此更加緊湊。
停止精度
對于定位應用,我們必須滿足的主要要求之一是電機的停止精度。步進電機和伺服電機都可以準確停止。
步進電機的停止精度取決于繞組(電氣)和齒結構(機械)的制造質量,而伺服電機的精度取決于裝配精度、編碼器分辨率和算法。
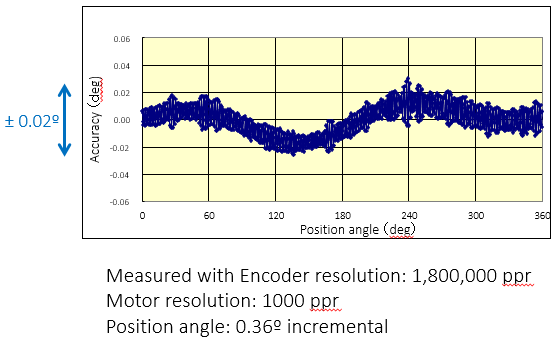
請記住,轉子和定子之間的氣隙非常薄,唯一的摩擦來自其滾珠軸承。摩擦力矩或重力負載會導致實際停止位置發生偏差,因此在您從一個位置移動到另一個位置時會有一點點誤差。 當我們繪制電機旋轉 1 整圈時發生的誤差時,它們如下圖所示。
伺服電機步進電機
?

請注意,它們都提供大約 +/-0.02° 的停止精度,低于步進電機典型的 3 弧分或 +/-0.05° 重復停止精度規格。雖然步進電機在 7.2° 增量時提供更好的可重復性或在 360° 增量時提供近乎完美的可重復性,但伺服電機的停止精度取決于其編碼器分辨率。
步進電機的停止精度在很大程度上取決于其繞組特性、轉子構造精度以及轉子中的齒數/極數。伺服電機的停止精度取決于裝配精度、編碼器分辨率和操作算法。 在某種程度上,您可以說步進電機是為定位應用而“機械設計”的,而伺服電機是為定位應用而“電氣設計”的。
高速性能
眾所周知,伺服電機比步進電機運行速度更高。這真正意味著伺服電機將在指定的 RPM 下輸出比步進電機更大的扭矩。扭矩性能的這種差異來自極數的差異以及伺服電機和步進電機設計之間的繞組電感。
極數也會影響電機繞組需要前進的次數才能使電機旋轉一圈。對于伺服電機,可能只需要 12 個“步”就可以轉動一整圈。但是,對于 2 相步進電機,它需要 200 個“步” 。在低速時,這不會產生顯著差異。但是,在高速行駛時,驅動器將無法為繞組完全通電。由于電流與扭矩成正比,因此扭矩會在高速時降低。
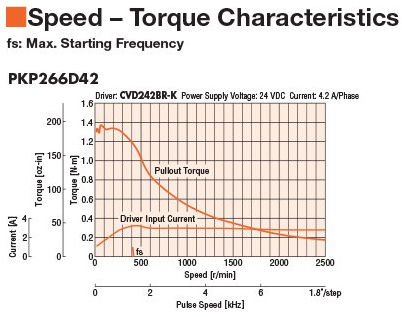
步進電機和伺服電機之間的性能差異可以通過它們的速度-扭矩曲線得到最好的體現。這是一個比較相同框架尺寸的步進電機和伺服電機的示例。
NEMA 23 步進電機200 瓦(1/4 馬力)60 毫米伺服電機
?
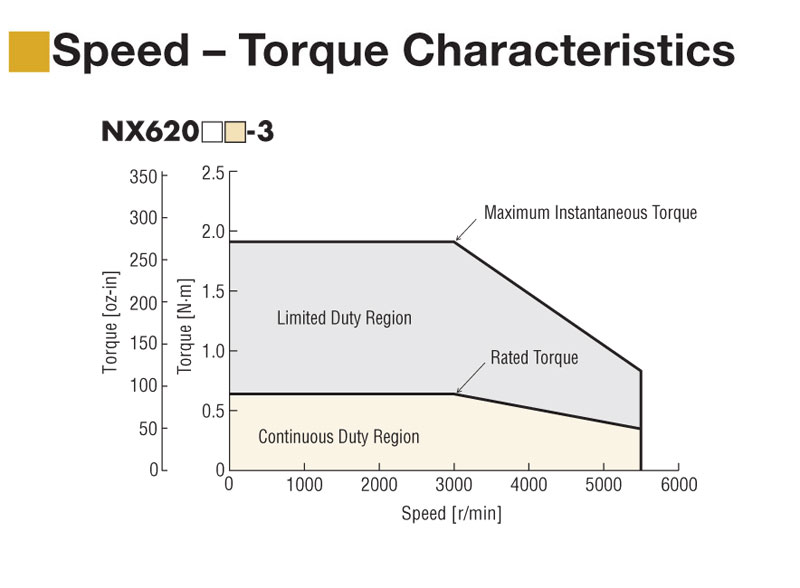
步進電機的高極數使其能夠產生高啟動并在低速下平穩運行。它們可以快速響應,無需編碼器即可準確定位,并輕松產生保持力矩。然而,由于高繞組電感、極數和 L/R 常數,在高速區域轉矩會降低。 伺服電機的低極數和低繞組電感不會產生高啟動扭矩,但可以使它們在整個速度范圍內更好地保持扭矩。
閉環反饋
根據定義,伺服電機必須采用閉環控制運行,而步進電機通常采用開環控制運行。伺服電機使用反饋來控制電機的位置、速度或扭矩。步進電機被命令移動到特定位置而不需要反饋,但可能會因過載而失去同步。
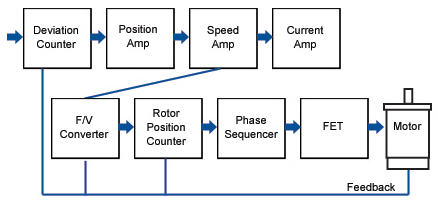
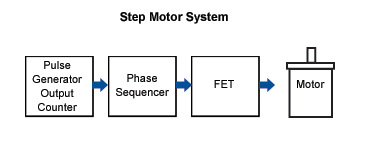
添加反饋以保持同步確實使驅動器設計復雜化并增加了組件數量。除了來自典型步進電機系統的脈沖發生器、相序器和 FET 之外,伺服電機系統還包含轉子位置計數器、F/V 轉換器、電流放大器、速度放大器、位置放大器和偏差計數器。所有這些組件都需要在 PID 回路中運行電機,在 PID 回路中,驅動器不斷計算誤差并調整比例/積分/微分增益以進行實時校正。這就是伺服電機更昂貴且需要處理時間的原因。
伺服電機系統步進電機系統
?
隨著閉環反饋,電機的負載與轉子慣性比也會增加。步進電機可以處理大約 10 倍的轉子慣量,而伺服電機可以處理 100 倍的轉子慣量。作為比較,閉環步進電機可以處理其轉子慣量的 30 倍。
步進電機無需反饋即可運行,因此運行所需的組件更少。這就是為什么它們更具成本效益。伺服電機需要反饋并在 PID 回路中運行,因此需要更多組件。
效率
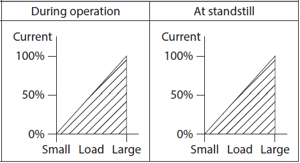
步進電機使用電流斬波驅動器技術,無論負載如何,它都能提供恒定的電流供應。電流與溫度成正比,因此步進電機的占空比需要限制在 50% 左右。 伺服電機提供更有效的電流控制,因為它只吸收所需的電流。步進電機更擅長的一件事是它能夠在零速時產生保持扭矩。伺服電機使用更多功率來產生保持扭矩。
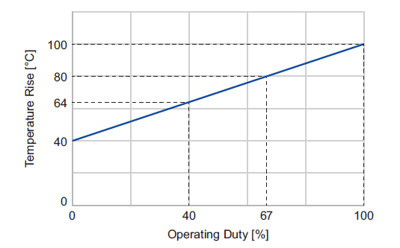
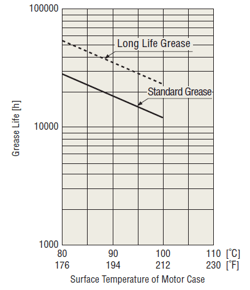
閉環反饋還允許更有效的電流控制,這會影響電機溫度和使用壽命。在下圖中,我們繪制了溫升與電機工作占空比 [%] 的關系圖。請注意溫度如何隨著工作負載而升高。這就是步進電機需要限制占空比的原因。電機的使用壽命取決于其軸承潤滑脂壽命,而軸承潤滑脂壽命取決于溫度。
?
高效的電流控制還可以帶來其他性能優勢,例如更低的噪音和振動。另外,正確選擇電機尺寸。當步進電機尺寸不合適時,它往往會振動得更多。如果伺服電機的尺寸或調整不當,它往往會“狩獵”更多。
僅汲取所需電流的能力是伺服電機系統的一大優勢,它還有助于延長使用壽命、降低某些應用的噪音或降低功耗。 步進電機要提供相同類型的高效電流控制,就需要閉合環路。
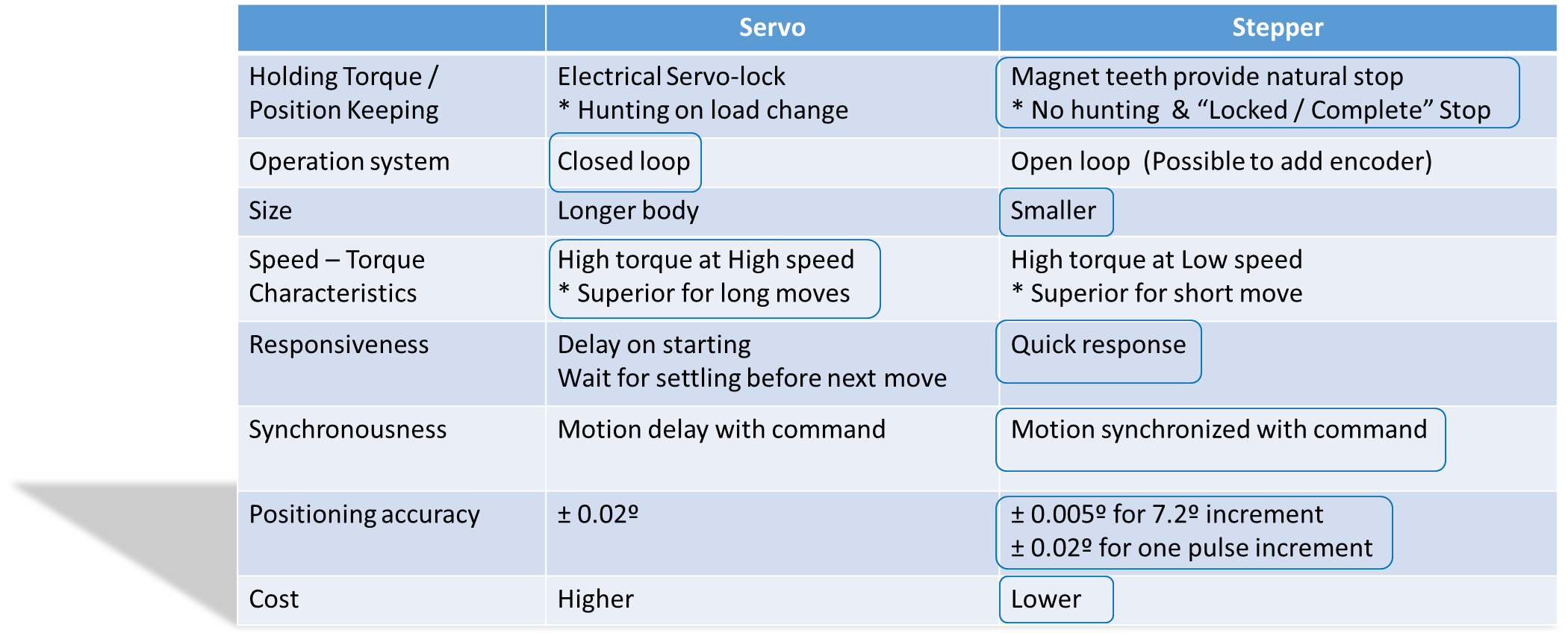
概括
為了幫助選擇產品,我們編制了一份伺服電機和步進電機之間差異的列表。
審核編輯:湯梓紅













 工商網監
工商網監
評論