 電子發燒友App
電子發燒友App


作者:貿澤電子Mark Patrick
無刷直流(BLDC)電機已經廣泛應用于家用電器、工業設備和汽車等領域。相對于傳統有刷電機,雖然無刷直流電機能夠提供更可靠和免維護的替代方案,但卻需要更復雜的電子設備來進行驅動。本文將探討驅動無刷直流電機的多種不同技術、傳感器方案以及使用的流行算法。此外,還將介紹一些來自領先供應商的電機驅動器IC以及合適的開發和原型設計資源。
無刷電機應用
在過去十年中,無刷直流電機已經變得非常流行,它的應用可能比Wi-Fi更加普遍,無論在家里、辦公室,還是在汽車等周圍場景中,您可能都會驚訝地發現這些無刷直流電機。Allied Market Research估計,到2030年,全球無刷直流電機市場將從2020年的332億美元增至722億美元(參見圖1),其《2030年無刷直流電機市場研究》報告預測,所有額定功率電機的復合年增長率為10.3%,其中750~3000W類別的無刷直流電機復合年增速最為顯著。
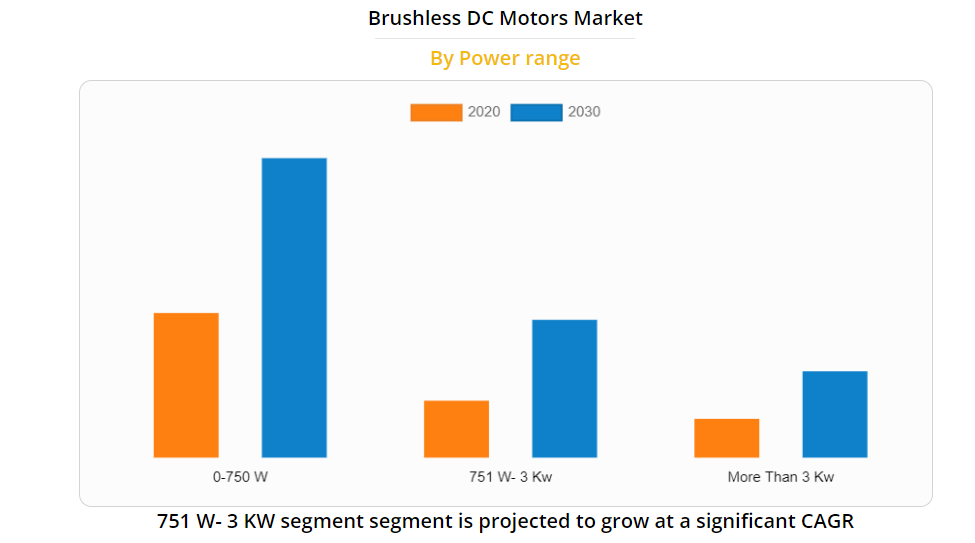
圖1:Allied Market Research(AMR)?發布的2020~2030年無刷直流電機市場增長趨勢。(來源:AMR,https://www.alliedmarketresearch.com/brushless-dc-motors-market,已獲請求許可)
無刷直流電機適用于多種不同應用,包括電池供電的電動工具、家用吸塵器、無線遙控無人機和電動汽車,以及從傳送帶到生產機器人等數百種工業領域的應用。
無刷直流電機由于其低維護特性而受到歡迎,它們的能效也很高,通常高達92%,比同等尺寸的有刷電機高出至少10%至15%。此外,由于沒有任何電刷摩擦,BLDC能夠以更高的速度運行。去除電刷也有助于實現更緊湊的尺寸,具有較低的可聽噪聲,并可顯著降低EMI。這些特性使它們成為電動汽車的理想動力傳動部件,因為在電動汽車中,高扭矩和高速性能至關重要。
然而,BLDC所具有的優勢也需要與其較高的成本和復雜的驅動要求一同考慮。圖2比較了流行的不同種類電機配置,顯示了它們的優缺點。盡管無刷直流電機操作和定子繞組內部結構略有不同,但它們與永磁同步電機(PMSM)很相似。
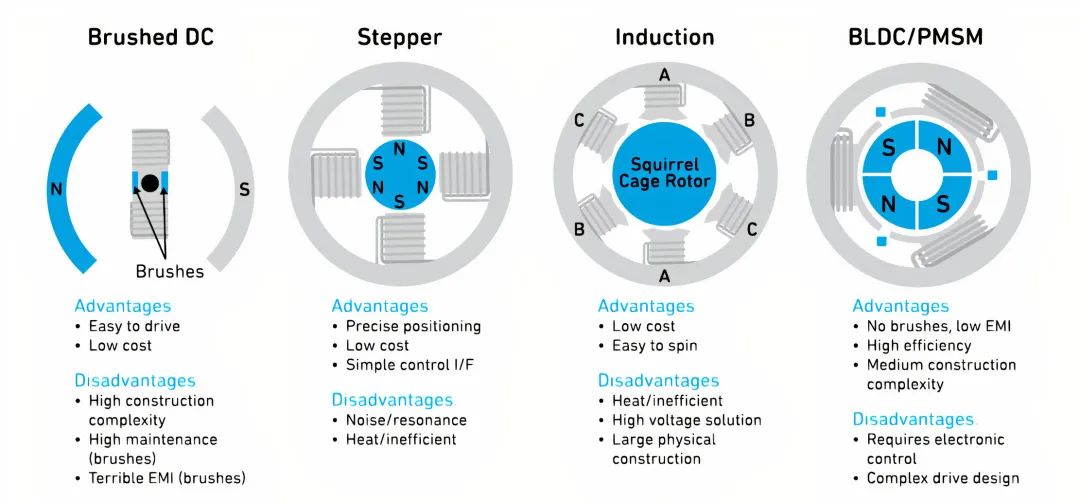
圖2:用以說明流行直流電機主要優缺點的產品類型。(來源:Qorvo)
無刷直流電機如何工作?
在探討BLDC和PMSM如何工作之前,讓我們簡要介紹一些基本的電機術語:
繞組:繞組是指放置在定子或轉子上的銅線線圈,它們起著電磁鐵的作用,可根據電流的方向產生磁場。圖2中無刷直流電機的三個繞組可以串聯連接構建單相電機,也可以單獨連接構建三相無刷直流電機。
轉子:轉子是指電機的旋轉部件。轉子周圍的繞組通過有刷電機電刷接收能量。在無刷電機中繞組是在定子上,永磁鐵圍繞著轉子。轉子和定子之間存在微小氣隙。
定子:定子是外殼電機的非旋轉部分。圖2中顯示了有刷電機的定子磁極。如果與BLDC比較,BLDC中的定子包含非旋轉繞組。
換向:通過改變繞組中電流方向以實現旋轉。
反電動勢:反電動勢是繞組在通過磁場時產生的電能。在無刷直流電機情況下,反電動勢來自轉子的永久磁鐵,它可用于感應轉子相對于定子繞組的位置,從而驅動換向過程。
永磁同步電機和無刷直流電機之間的區別主要在于其定子繞組的形狀,以及由此產生的反電動勢波形特性(參見圖3)。
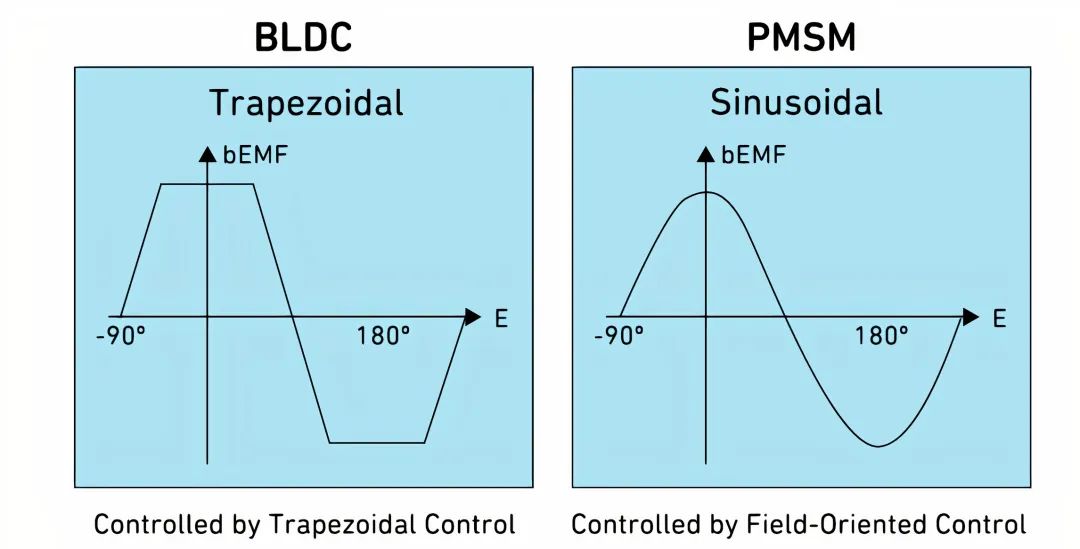
圖3:BDLC和PMSM電機產生的反電動勢波形比較。(來源:Qorvo)
電機驅動算法和傳感器
實現無刷直流電機或永磁同步電機的旋轉需要通過對施加到定子繞組的驅動信號進行換向。基于半導體器件的電機驅動控制器(通常稱為驅動器)產生波形,波形的數量和形狀取決于電機類型和相數。如圖3所示,與永磁同步電機采用的具有磁場定向控制(FOC)正弦方法相比,無刷直流電機適合梯形驅動波形。在三相PMSM中,換向利用三個正弦波波形,相位彼此相差120度。BLDC電機也可以使用正弦波形來驅動。
無論是使用FOC還是梯形驅動器,有效的轉子控制都需要精確地知道轉子相對于定子繞組的位置,這能夠為電機驅動提供重要的反饋,以便更好地控制電機速度和扭矩。位置信息決定驅動信號的順序、時間和頻率。
確定轉子位置的方法有兩種:傳感器或無傳感器。
傳感器:霍爾效應傳感器可布置在每個定子繞組旁邊(參見圖2中的藍色小方塊),在轉子旋轉時可檢測磁場極性的變化(N到S,S到N)。每個三相電機需要三個傳感器。
無傳感器:無傳感器方法使用反電動勢來確定轉子位置,而不是使用傳感器。
兩種感測方法各有利弊。使用霍爾效應傳感器會涉及額外的零部件成本和更多的組裝時間,但采用傳感器感測的BLDC/PMSM電機可提供優異的扭矩、平穩的轉動和更高效率。永磁同步電機的驅動控制器往往更復雜,采用FOC需要使用傳感器。
無傳感器方法在無刷直流電機中很普遍,會使電機達到比較誘人的低價格,但要求算法根據定子繞組中感應的反電動勢來確定轉子位置。無傳感器BLDC電機的一個很大挑戰出現在啟動時,由于沒有任何運動,就沒有反電動勢,所以計算轉子的位置必須用另一種方法。通常,高頻驅動信號被饋送到每個相繞組,通過特定算法相應地計算位置。
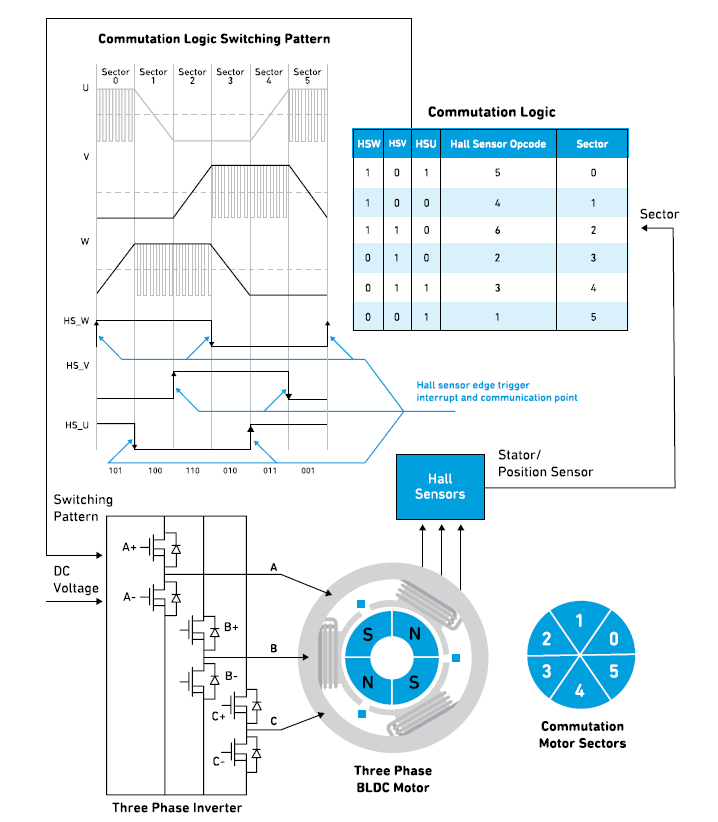
圖4:一個三相BLDC電機簡化圖,其中使用霍爾效應傳感器創建換向過程,并對逆變器操作進行排序。(來源:Qorvo)
圖4突出顯示了使用霍爾效應傳感器(HSW、HSV和HSU)的一個簡單三相BLDC電機配置。傳感器基本上是數字開關,指示檢測到的磁場極性,N等于“1”,S等于“0”。三個傳感器的輸出組合在一起,給出一個3位數字邏輯“操作碼(opcode)”,在它變化時指示轉子的位置和方向,這些信息是三相功率晶體管逆變器級提供驅動信號的基礎。對于功率相對較低的BLDC應用,傳感器接口、電機控制器和驅動晶體管通常集成在單個控制器IC中。而高功率電機則通常采用來自控制器IC的柵極驅動輸出,并采用配備有散熱器的功率MOSFET來實現所需的驅動電流。
為了改變電機的速度,可通過脈寬調制(PWM)技術來改變占空比(duty cycle),即脈沖開/關的比率。這種方法可以限制啟動電流,因而在電機啟動期間采用也可提供很大優勢。
BLDC電機驅動IC和開發資源
圖5所示為一個低功率無傳感器三相BLDC電機驅動器TI DRV10963的功能框圖,該IC包含三個功率MOSFET,適合于最高5V/0.5A的BLDC電機,可用于驅動筆記本電腦和高性能處理器上使用的冷卻風扇。DRV10963具有短路和過流保護功能,通過多路復用模數轉換器(ADC)監測每個MOSFET的電流和電壓。PWM輸入可以用來控制并達到期望的電機速度。“FR”輸入允許在啟動時改變電機方向,“FG”輸出提供電機速度信息。
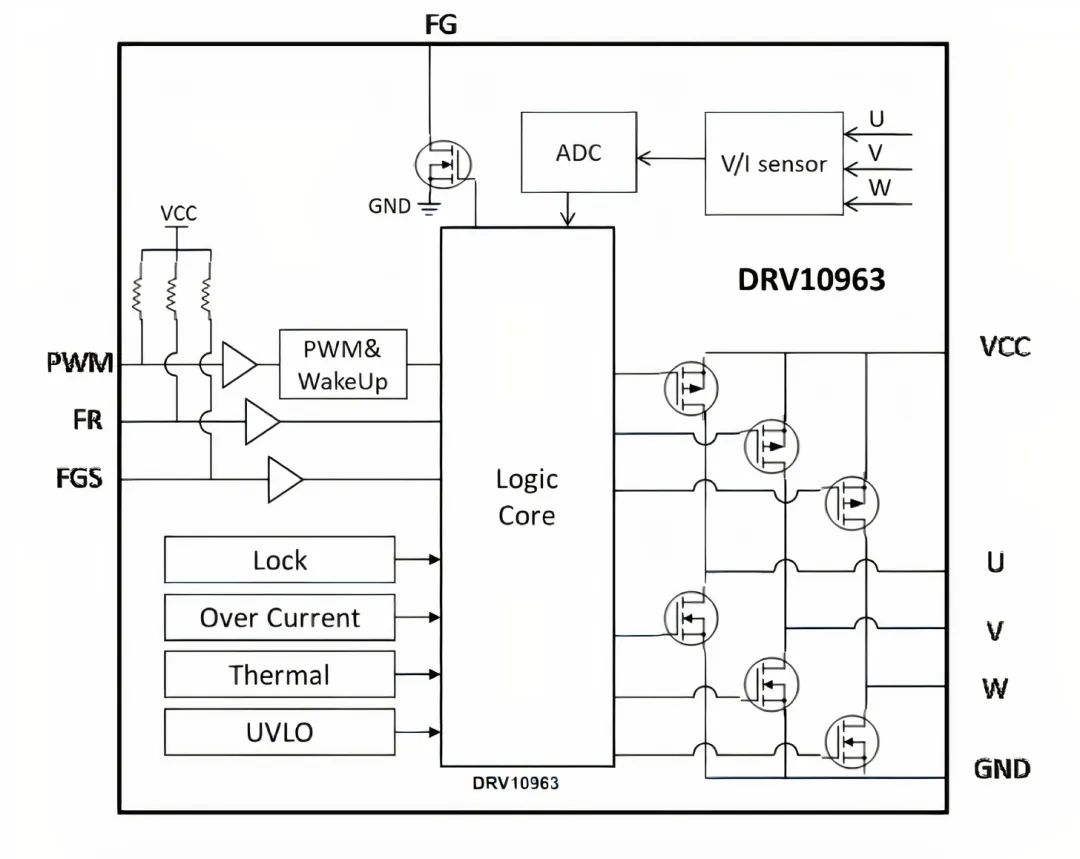
圖5:TI DRV10963 5V三相無傳感器BLDC電機驅動器功能框圖。(來源:TI)
Microchip可提供全面的單芯片BLDC電機驅動器和柵極驅動器IC系列,MCP8063就是其中一例,它是一種三相無刷正弦無傳感器電機驅動器,專為汽車冷卻風扇和多種泵應用而設計。
Qorvo PAC5532電源控制器適用于廣泛的高速消費產品、工業和汽車中的電機控制等應用,包括電池供電電動工具、電動自行車和輕型混合動力汽車等。PAC5532適用于48~120VDC系統,集成有150MHz Arm Cortex-M4F 32位內核,具有全面且可配置的電源管理和驅動功能(參見圖6)。
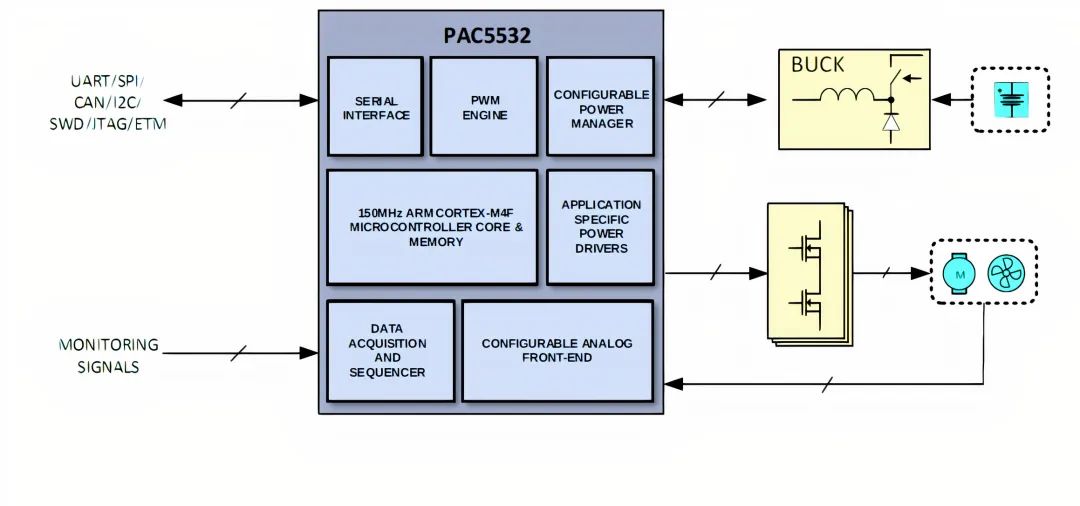
圖6:電池供電電機控制應用中Qorvo PAC5532的簡化配置框圖。(來源:Qorvo)
Qorvo PAC5532EVK1評估套件可為PAC5532提供補充支持。
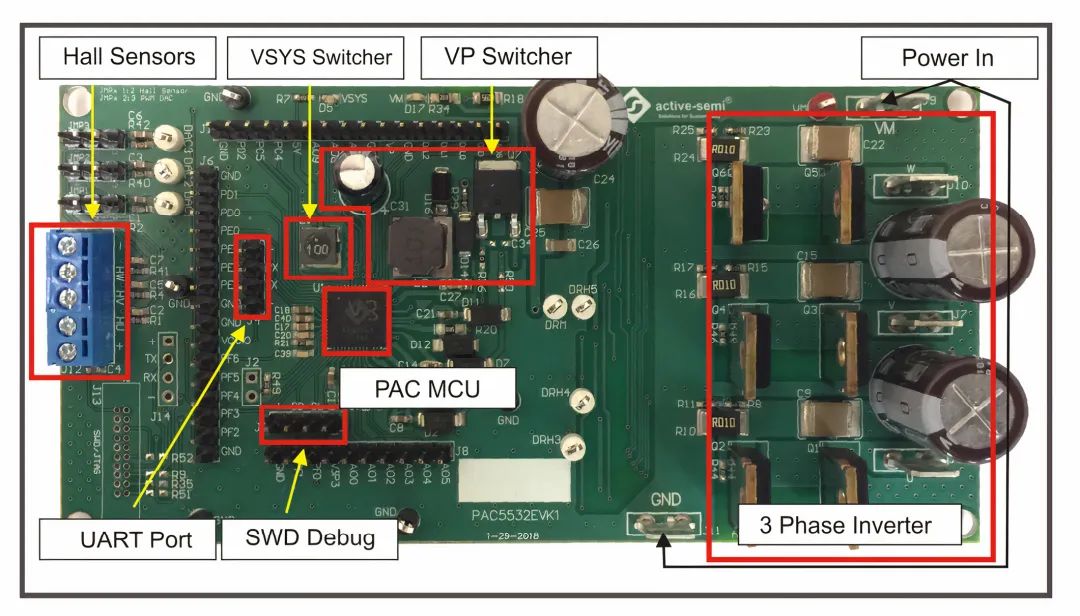
圖7(來源:Qorvo)列出了評估套件的主要組件,包括PAC5532和三相半H橋(half H-bridge)逆變器組件。基于GUI的軟件開發工具包可從Qorvo網站下載。
另一款電機控制IC是高性能Renesas RA6T2微控制器系列。該IC基于240MHz Arm Cortex-M33微控制器內核,包括一個基于硬件的加速器,用于加速復雜的電機控制算法和運行安全加密功能。它還集成了一組非常齊全的模擬功能,包括一個12位模數轉換器(ADC)、一個12位數模轉換器(DAC)、可編程增益放大器和高速比較器(參見圖8)。
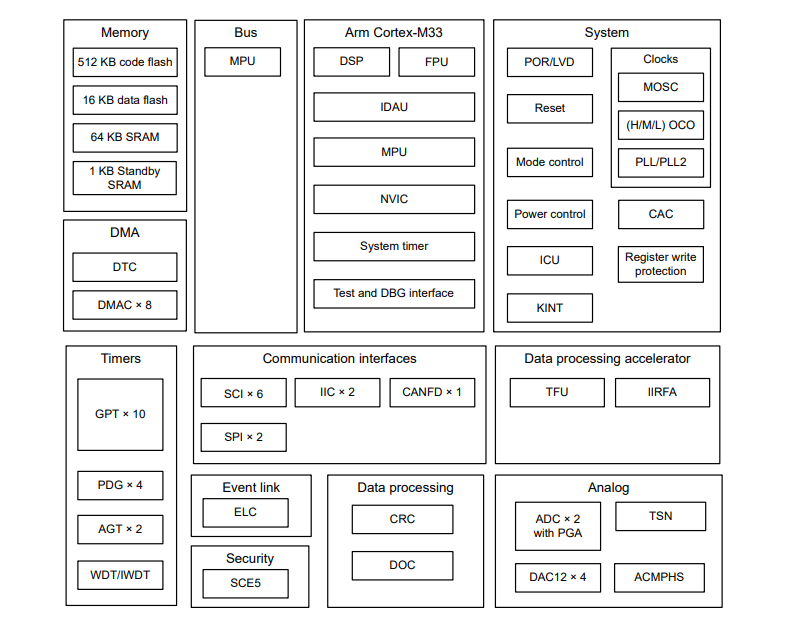
圖8:基于Renesas RA6T2微控制器的電機控制器功能框圖。(來源:Renesas)
Renesas MCK-RA6T2評估套件可針對無刷電機驅動器設計提供一種方便實用的原型制作方法。該套件包括三個連接板:逆變器板、微控制器板和通信板,還包括一個小型無刷直流電機以及所有必需的電纜。MCK-RA6T2的功能架構如圖9所示。
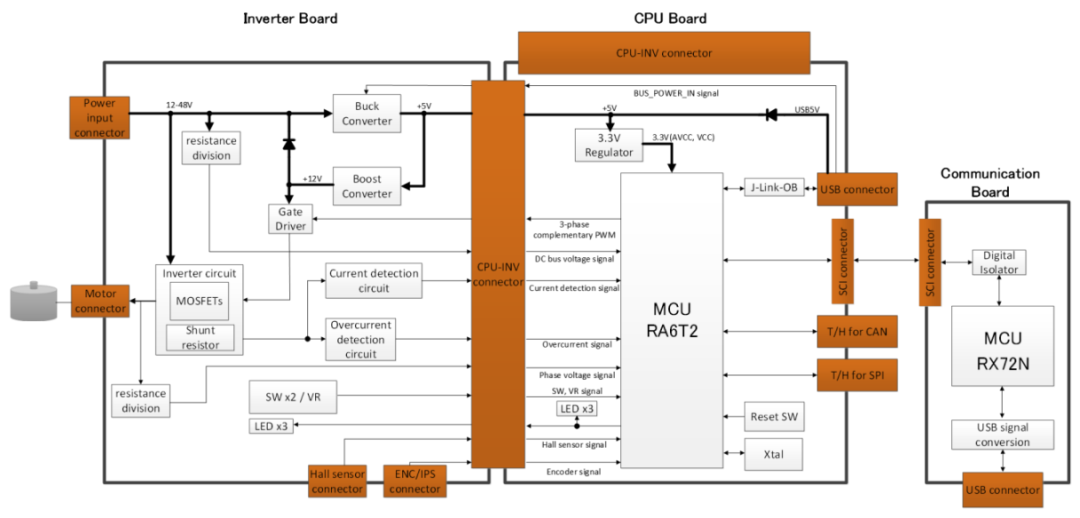
圖9:Renesas MCK-RA6T2無刷電機評估套件的功能框圖。(來源:Renesas)
開始BLDC電機控制設計
在本文中,我們探討了無刷電機如何運行,討論了它們受市場歡迎的主要原因,并著重介紹了一些應用案例。上面介紹的領先半導體解決方案為您提供了一種使用方便,有充分文檔支持,且值得信賴的技術途徑,能夠幫助您開始首個BLDC/PMSM設計。 ?
編輯:黃飛
?










 工商網監
工商網監
評論