 電子發(fā)燒友App
電子發(fā)燒友App


永磁同步電機(jī)在傳統(tǒng)工業(yè)中有著廣泛的應(yīng)用場(chǎng)景,正常工作狀態(tài)下,永磁同步電機(jī)轉(zhuǎn)子旋轉(zhuǎn)軸心、幾何軸心應(yīng)和定子軸心相同,但也會(huì)因?yàn)橐恍┕に嚮蛘甙惭b問題,使得電機(jī)處在偏心運(yùn)動(dòng)的工況下;同時(shí)近些年隨著電動(dòng)汽車的快速發(fā)展,永磁同步電機(jī)廣泛應(yīng)用在電動(dòng)車上,由于較大的簧下質(zhì)量,長(zhǎng)期承受劇烈的車身載荷及路面激勵(lì),使得電機(jī)出現(xiàn)軸承磨損、轉(zhuǎn)軸彎曲現(xiàn)象,造成定轉(zhuǎn)子不對(duì)中,氣隙分布不均勻,這種情況稱為電機(jī)偏心。 ?
轉(zhuǎn)子偏心故障可分為靜偏心故障、動(dòng)偏心故障等。產(chǎn)生靜偏心的主要原因是即定轉(zhuǎn)子不同軸心,造成動(dòng)偏心的原因是轉(zhuǎn)軸彎曲或軸承損壞等。靜偏心故障是電機(jī)普遍存在的故障,靜偏心相當(dāng)于轉(zhuǎn)子旋轉(zhuǎn)中心從定子中心向某個(gè)方向偏移,使轉(zhuǎn)子在此方向相對(duì)于定子偏心,定、轉(zhuǎn)子間氣隙發(fā)生變化,這種氣隙偏心固定在某一位置,它不隨轉(zhuǎn)子旋轉(zhuǎn)而改變位置。動(dòng)偏心故障也屬于電機(jī)常見的故障類型,動(dòng)偏心相當(dāng)于轉(zhuǎn)子中心從定子中心向某個(gè)方向偏移,但轉(zhuǎn)子旋轉(zhuǎn)中心沒有偏移,這種氣隙偏心隨轉(zhuǎn)子轉(zhuǎn)動(dòng)而轉(zhuǎn)動(dòng)。
在電機(jī)發(fā)生偏心的情況下,氣隙磁場(chǎng)并不對(duì)稱,以等效電路為基礎(chǔ)的經(jīng)典算法將不再適用,為此建立電機(jī)的有限元模型,基于瞬態(tài)磁場(chǎng)的計(jì)算結(jié)果,給出不同故障類型下的氣隙磁場(chǎng)以及轉(zhuǎn)矩曲線變化特征。
本文將以某一永磁同步電機(jī)模型為例,詳細(xì)描述基于Altair Flux軟件進(jìn)行永磁同步電機(jī)的轉(zhuǎn)子靜、動(dòng)偏心工況的設(shè)定分析,并進(jìn)一步評(píng)估偏心問題帶來的問題。本文所有分析操作基于Flux & FluxMotor2022版本進(jìn)行。
1?電機(jī)轉(zhuǎn)子偏心分類
對(duì)于電機(jī)轉(zhuǎn)子偏心問題來說,總體可以分為:靜偏心、動(dòng)偏心以及混合偏心三類問題。其中,靜偏心問題可描述為轉(zhuǎn)子幾何中心與電機(jī)定子模型中心有一定偏移,轉(zhuǎn)子的旋轉(zhuǎn)中心與其幾何中心重疊;對(duì)于動(dòng)偏心而言,同樣幾何中心有一定的偏移,但是轉(zhuǎn)子的旋轉(zhuǎn)中心與定子的幾何中心重疊;混合偏心問題,是前兩者問題的疊加,即轉(zhuǎn)子有自身旋轉(zhuǎn)軸的自轉(zhuǎn),同時(shí)轉(zhuǎn)子也圍繞著定子的幾何中心公轉(zhuǎn)。
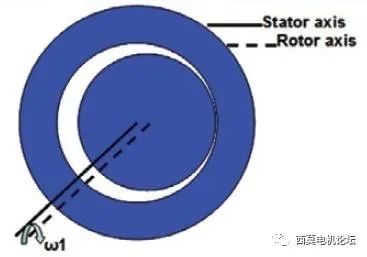
靜偏心
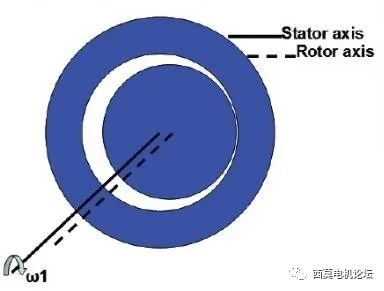
動(dòng)偏心
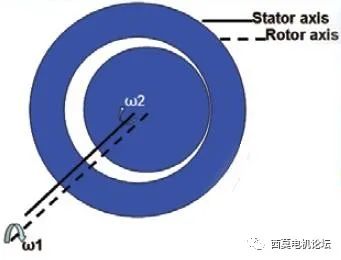
混合偏心
2?快速生成永磁同步電機(jī)有限元分析模型
通過FluxMotor可以快速建立永磁同步電機(jī)的2D磁場(chǎng)有限元分析模型,并直接轉(zhuǎn)換生成Flux2D模型腳本文件(*.py),然后通過Flux2D運(yùn)行該py腳本文件即可獲得包含永磁同步電機(jī)模型、網(wǎng)格以及物理設(shè)置的有限元模型文件。有關(guān)如何通過FluxMotor快速建立生成電機(jī)模型的步驟請(qǐng)參考FluxMotor部件生成的相關(guān)文檔。
2.1??FluxMotor中快速建立永磁同步電機(jī)模型
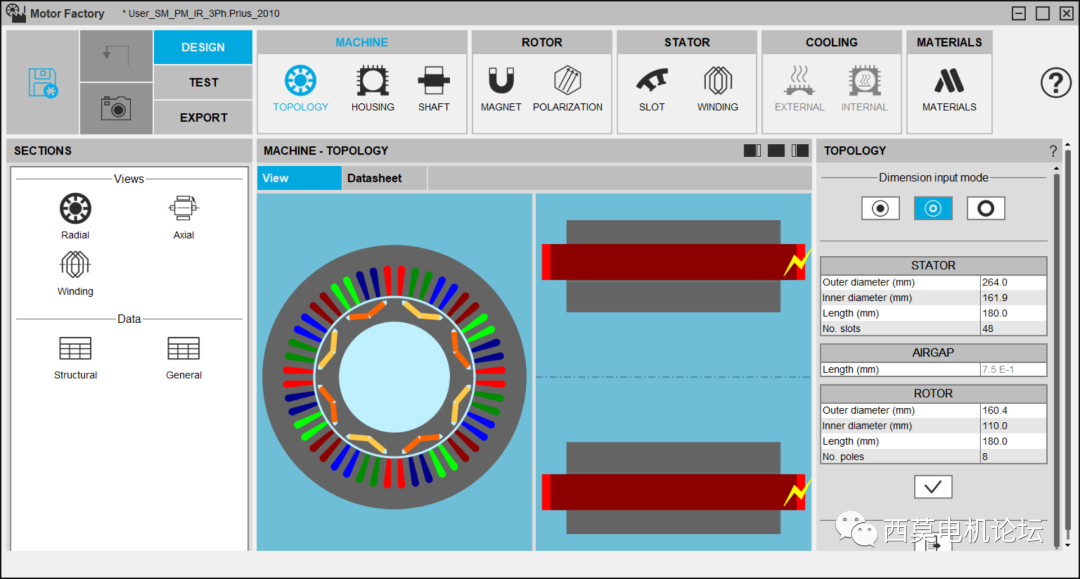
本文以一8極48槽內(nèi)置式三相永磁同步內(nèi)轉(zhuǎn)子電機(jī)為例,其基本拓?fù)?a target="_blank">參數(shù)為:
| 定子外徑(mm) | 定子內(nèi)徑(mm) | 轉(zhuǎn)子外徑(mm) | 轉(zhuǎn)子內(nèi)徑(mm) | 等效軸長(zhǎng)(mm) |
| 264 | 161.9 | 160.4 | 110 | 180 |
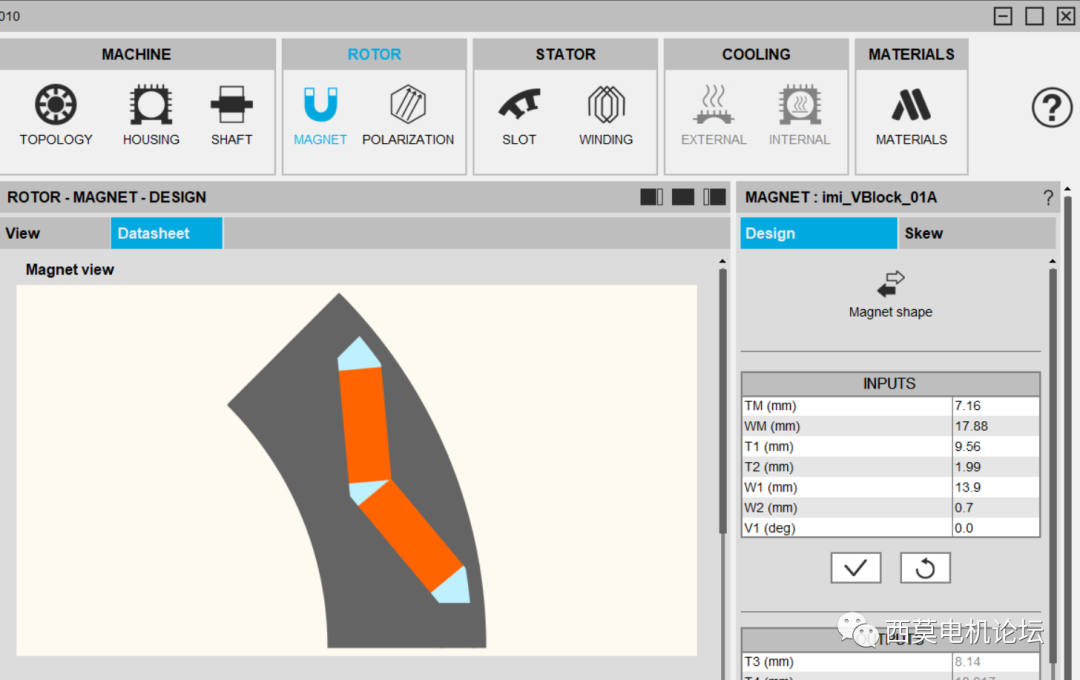
轉(zhuǎn)子采用FluxMotor軟件自帶零件模板imi_VBlock_01A,詳細(xì)參數(shù)設(shè)置如下圖所示:
?
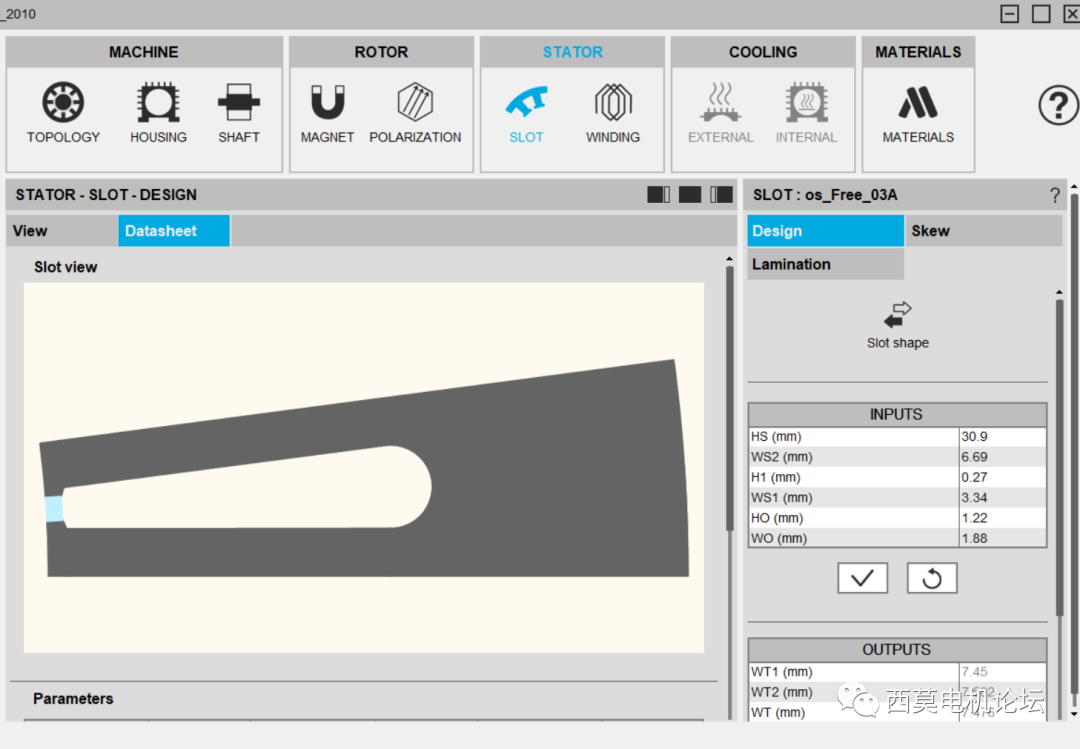
? 定子采用FluxMotor軟件自帶零件模板os_Free_03A,定子槽結(jié)構(gòu)尺寸參數(shù)如下圖所示:
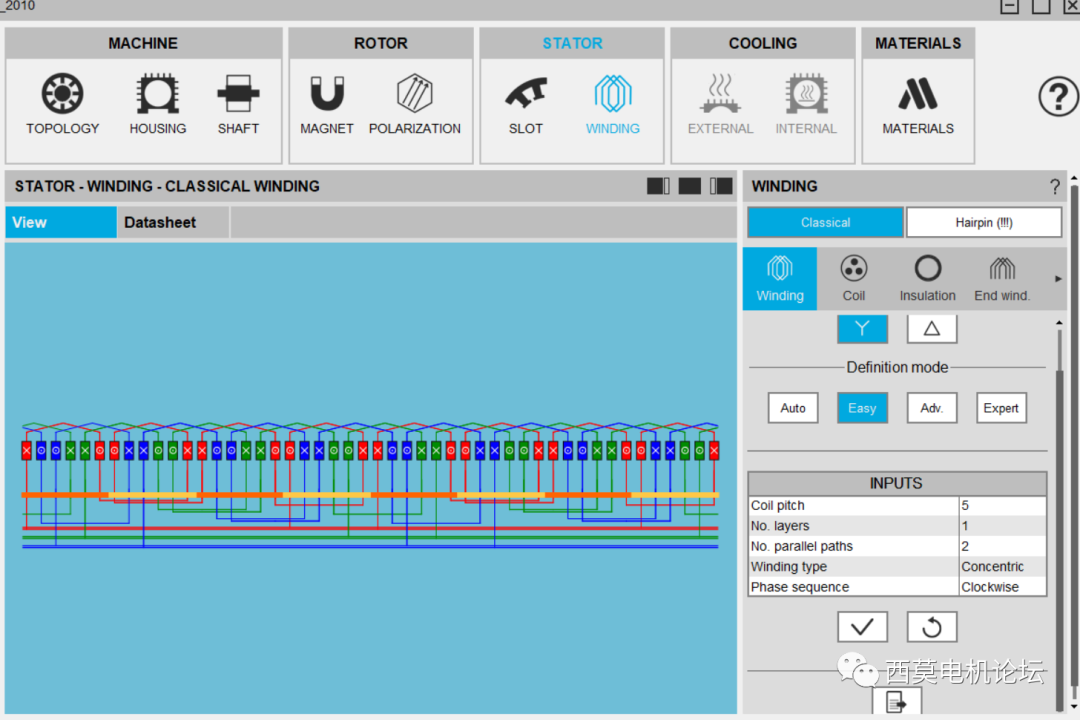
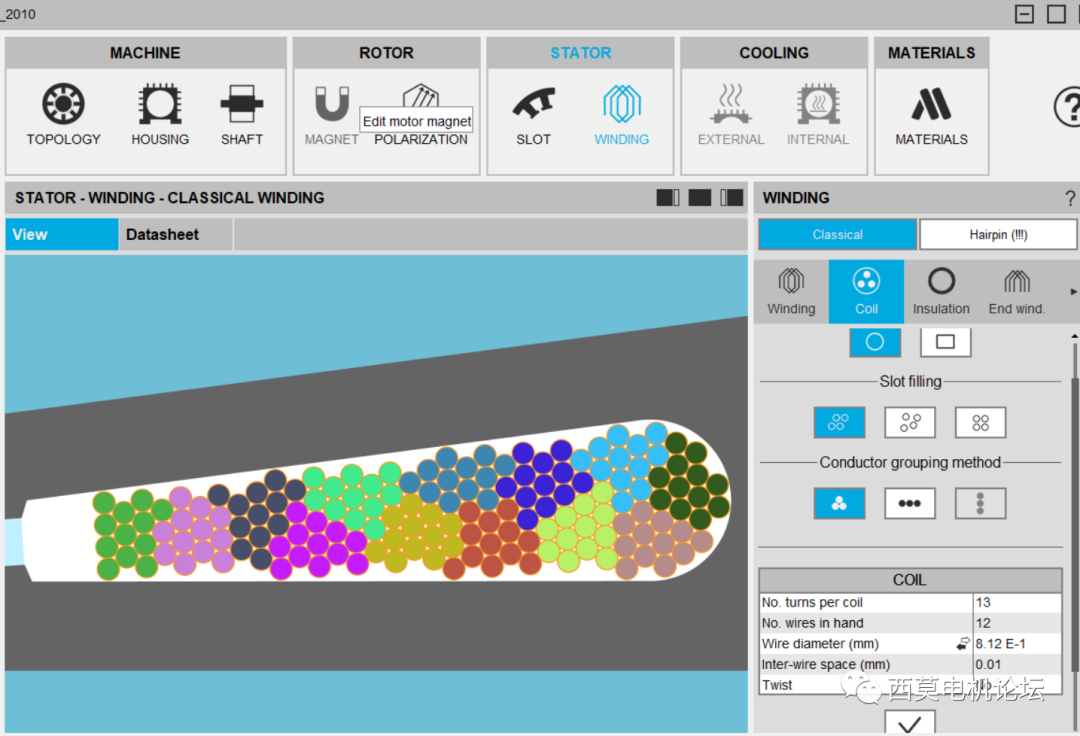
? 定子繞組采用三相星接連接,節(jié)距為5,單層繞線方式,并聯(lián)支路數(shù)為2,單個(gè)線圈匝數(shù)為13,F(xiàn)luxMotor中相關(guān)參數(shù)設(shè)置如下圖所示:
?
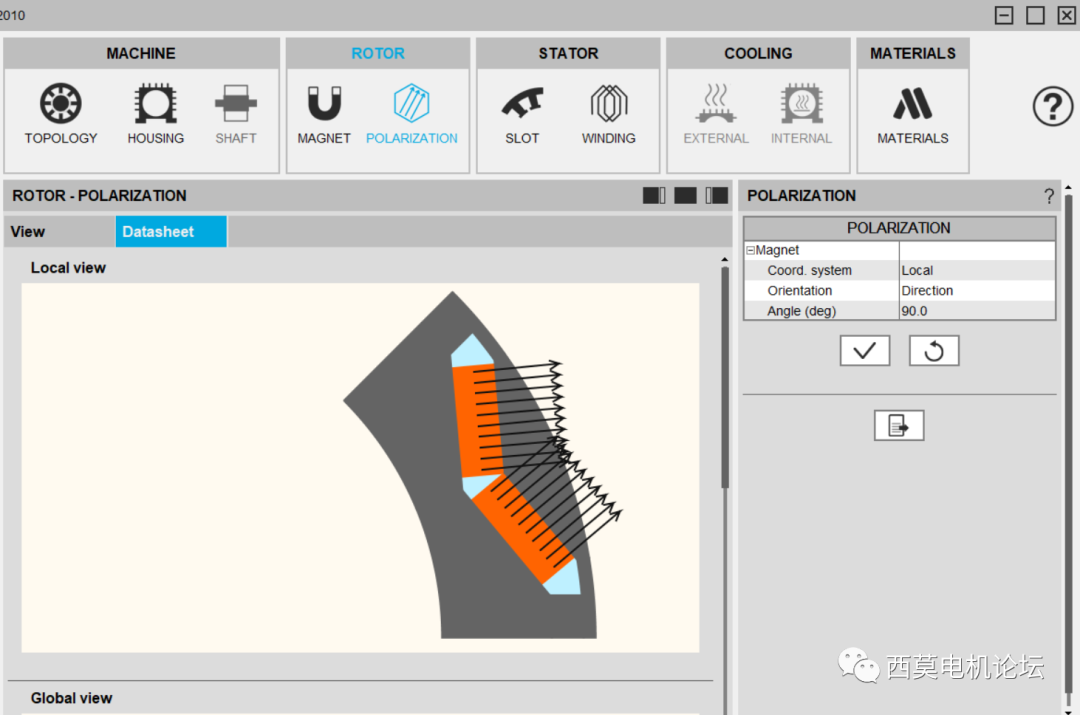
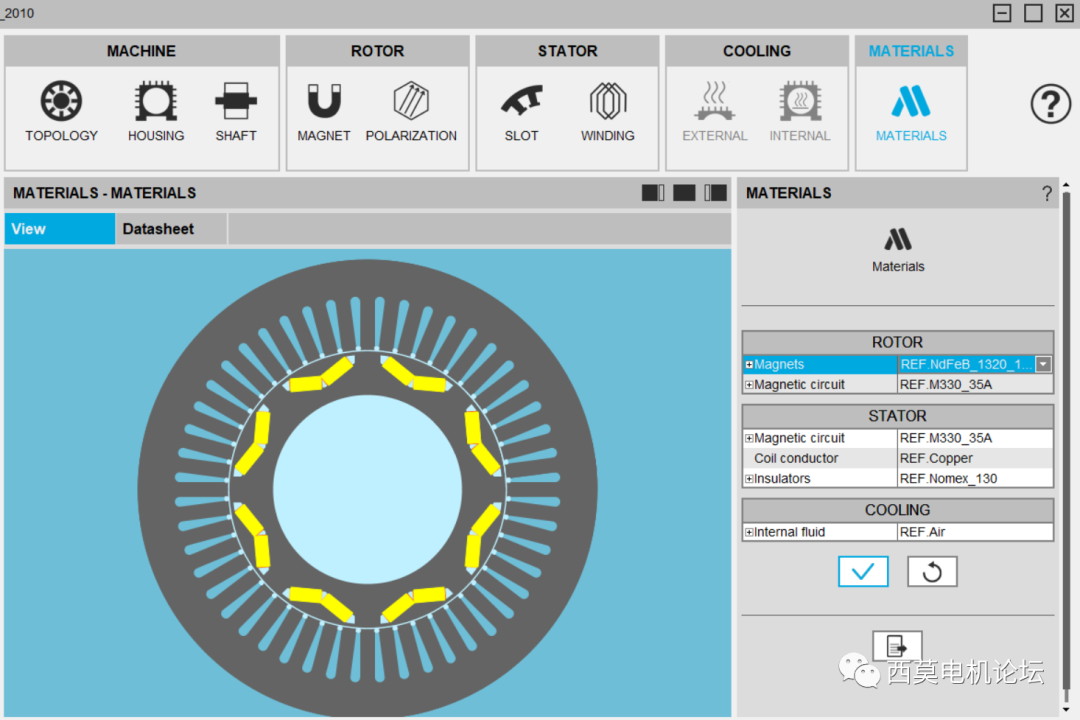
? 示例中模型磁鋼及定轉(zhuǎn)子材料采用軟件自帶材料模型,磁鋼采用NdFeB_1230_1400,定轉(zhuǎn)子硅鋼片采用M330_35A。
? 至此,F(xiàn)luxMotor中永磁同步電機(jī)基本模型建立完成,可點(diǎn)擊TEST進(jìn)行電機(jī)相關(guān)性能快速評(píng)估,本文不作詳述。由于偏心問題是一類故障問題,需要對(duì)轉(zhuǎn)子的旋轉(zhuǎn)位置進(jìn)行編輯修改,因此需要首先將FluxMotor生成的模型轉(zhuǎn)至Flux2D。
2.2??FluxMotor電機(jī)模型輸出至Flux2D
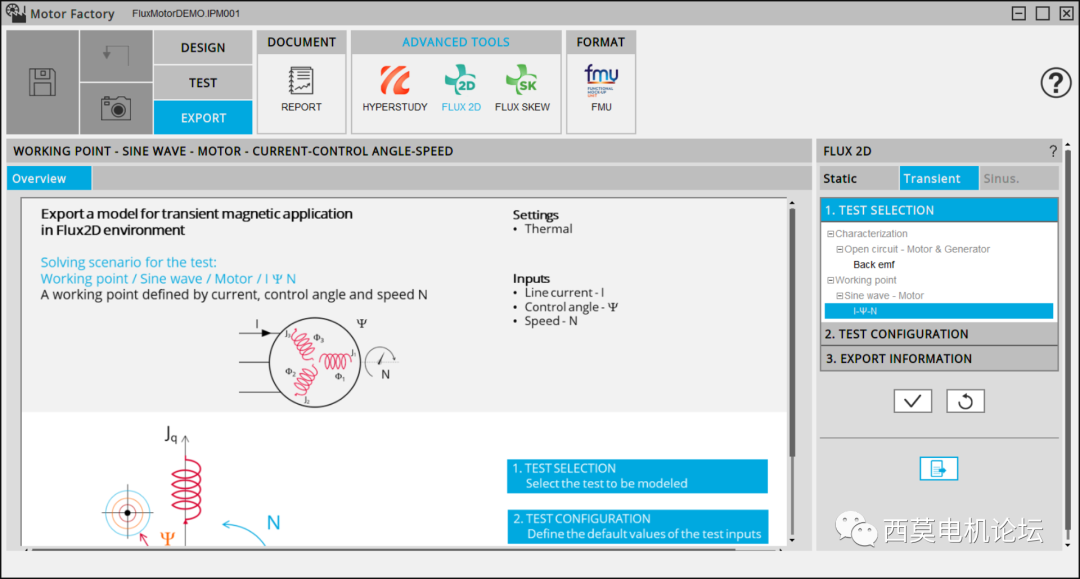
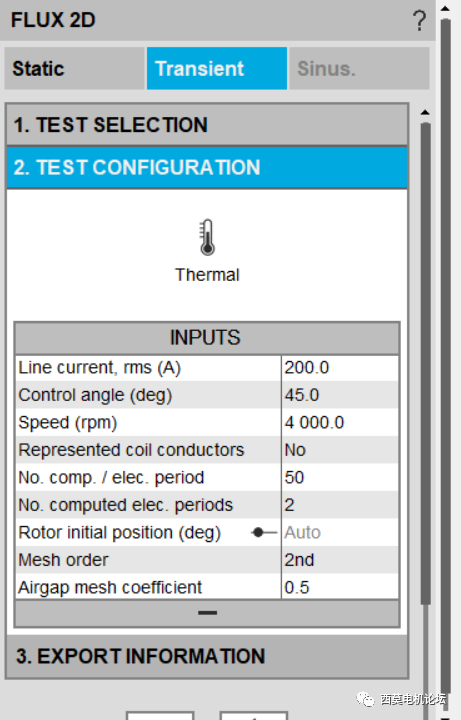
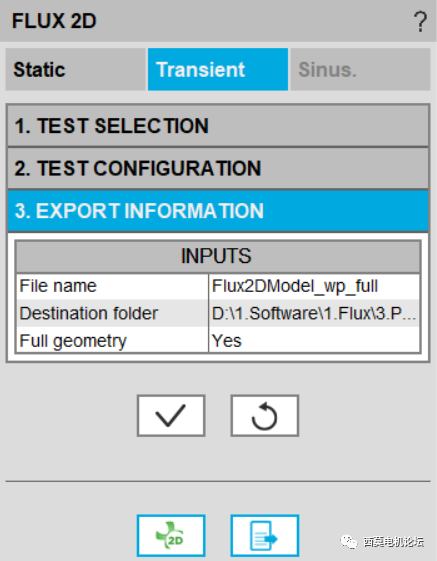
點(diǎn)擊EXPORT>FLUX2D,選擇Transient中的I-φ-N,設(shè)置相關(guān)的工況計(jì)算參數(shù)(后續(xù)Flux分析中會(huì)進(jìn)行修改),選擇Flux2D腳本文件保存目錄,點(diǎn)擊Export model按鈕。
?
?
在目標(biāo)文件夾生成的*.py文件。
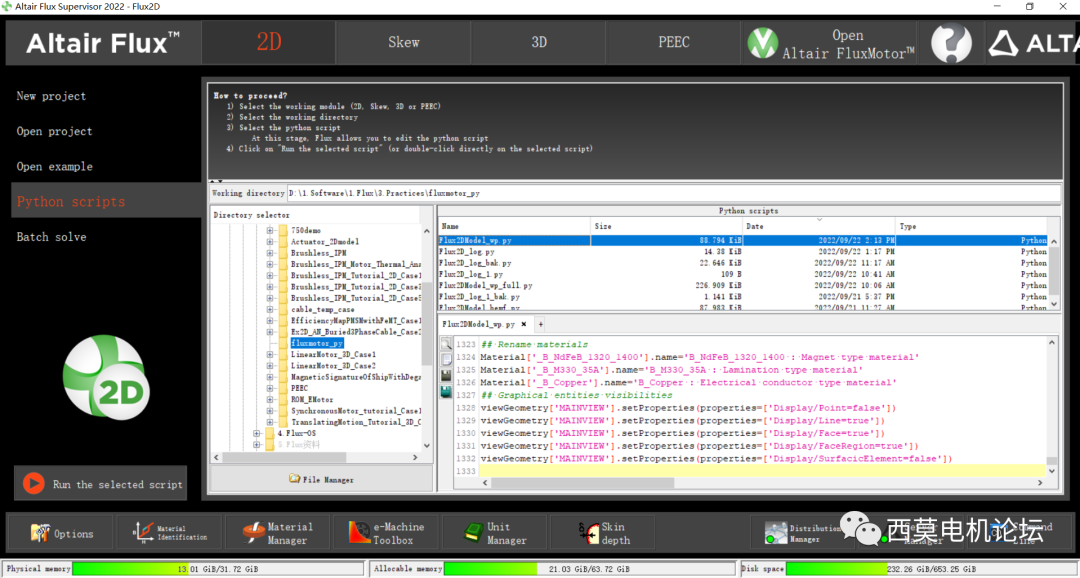
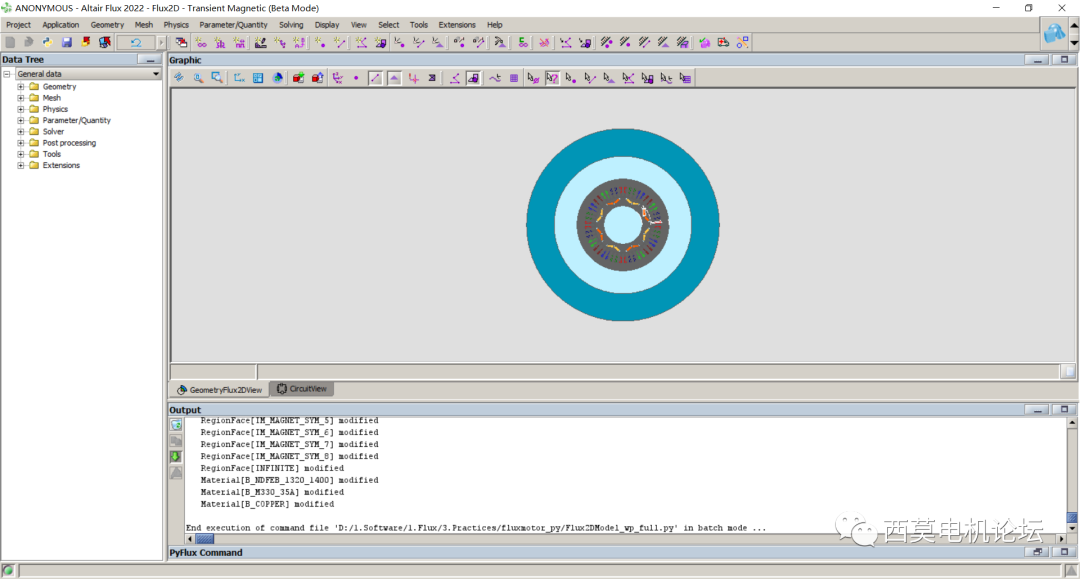
 ? 點(diǎn)擊Flux Supervisor管理界面,選擇2D,左側(cè)欄目選擇“Python scripts”,并將工作目錄定位至上述生成的*.py腳本文件處,點(diǎn)擊選擇該腳本文件,點(diǎn)擊Run the selected script按鈕,生成永磁同步電機(jī)Flux2D有限元分析模型,并進(jìn)行保存。
? 點(diǎn)擊Flux Supervisor管理界面,選擇2D,左側(cè)欄目選擇“Python scripts”,并將工作目錄定位至上述生成的*.py腳本文件處,點(diǎn)擊選擇該腳本文件,點(diǎn)擊Run the selected script按鈕,生成永磁同步電機(jī)Flux2D有限元分析模型,并進(jìn)行保存。
?
3?永磁同步電機(jī)(PMSM)偏心工況及計(jì)算
3.1?電機(jī)有限元模型靜偏心工況設(shè)定
將上述Flux2D模型打開得到的是正常工作點(diǎn)情況下的模型,對(duì)于靜偏心問題,需要將上述電機(jī)模型進(jìn)行電機(jī)偏心設(shè)置編輯,其中包括兩部分,第一部分是轉(zhuǎn)子幾何模型的偏心問題,第二部分是旋轉(zhuǎn)物理設(shè)置。
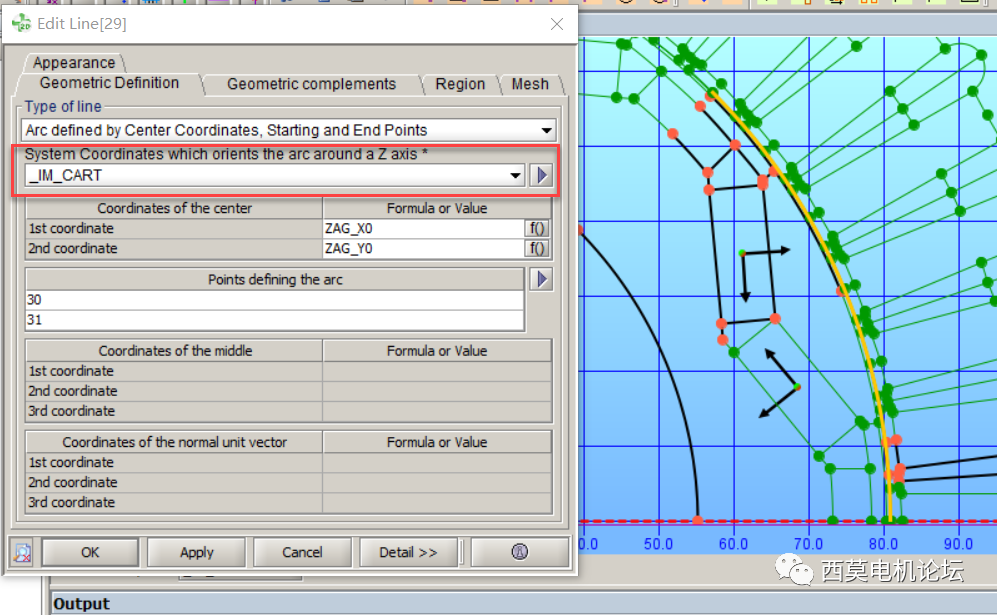
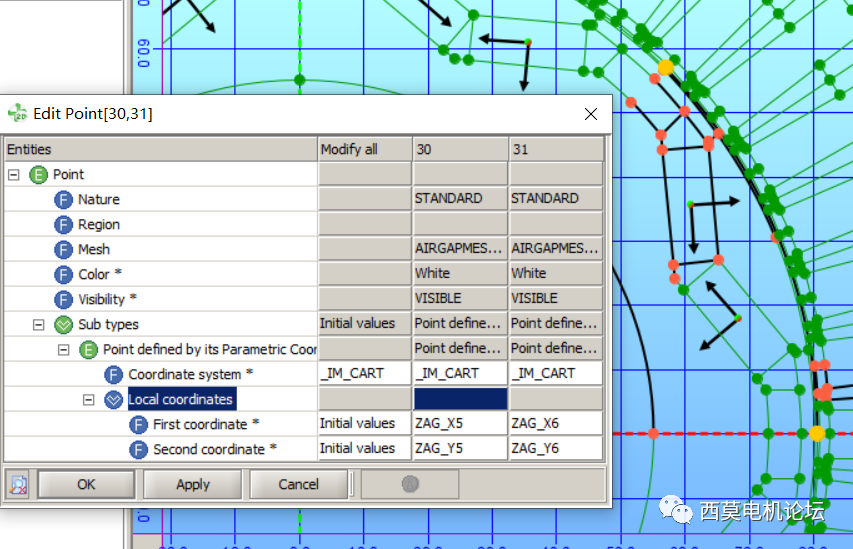
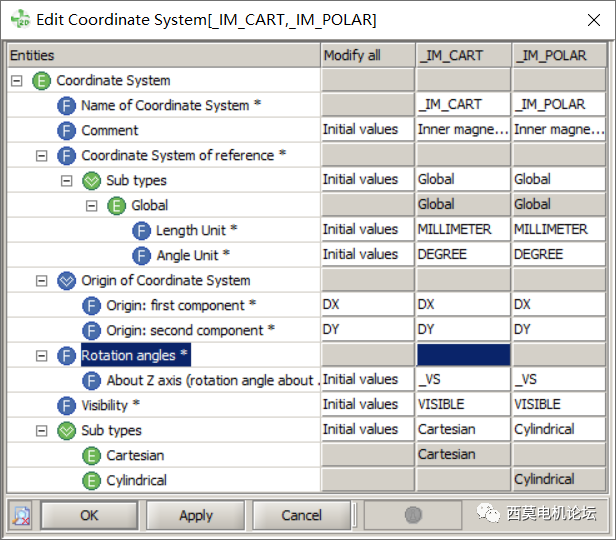
先是刪除網(wǎng)格,然后對(duì)電機(jī)的轉(zhuǎn)子幾何模型進(jìn)行平移操作。對(duì)于從FluxMotor導(dǎo)出的.py參數(shù)化永磁同步電機(jī)模型而言,轉(zhuǎn)子模型上的幾何點(diǎn)是主要是根據(jù)_IM_CART和_IM_POLAR兩個(gè)坐標(biāo)系定義的,其中前者為直角坐標(biāo)系,后者為極坐標(biāo)系。要對(duì)永磁同步電機(jī)進(jìn)行偏移,只需要對(duì)這兩個(gè)坐標(biāo)系進(jìn)行編輯即可。在此文針對(duì)靜偏心問題,對(duì)兩個(gè)坐標(biāo)系進(jìn)行DX、DY偏移量的定義。
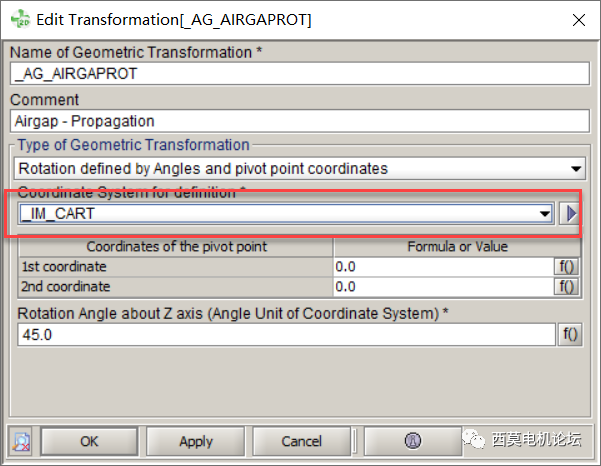
首先是將現(xiàn)有參數(shù)化永磁同步電機(jī)的滑移邊界弧線以及點(diǎn)的相對(duì)坐標(biāo)系從_OS_CART統(tǒng)一改為_IM_CART。
?
? 右擊Geometry > Geometric tools >Transformation > _AG_AIRGAPROT,將坐標(biāo)系從_OS_CART改為_IM_CART。
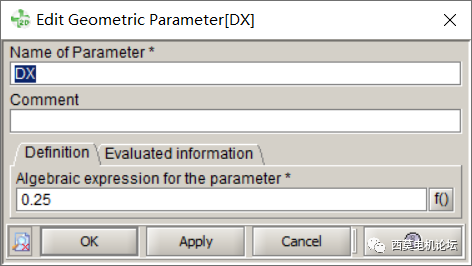
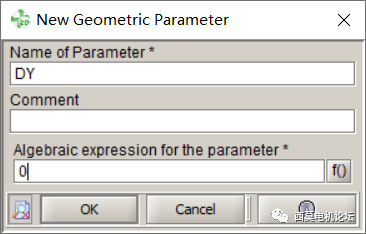
? 點(diǎn)擊Geometry > Geometric tools > Geometricparameter > New, 創(chuàng)建DX、DY變量。
?
按住Ctrl, 選擇Geometric parameter > Coordinate system > _IM_POLAR以及_IM_CART,右擊edit array。
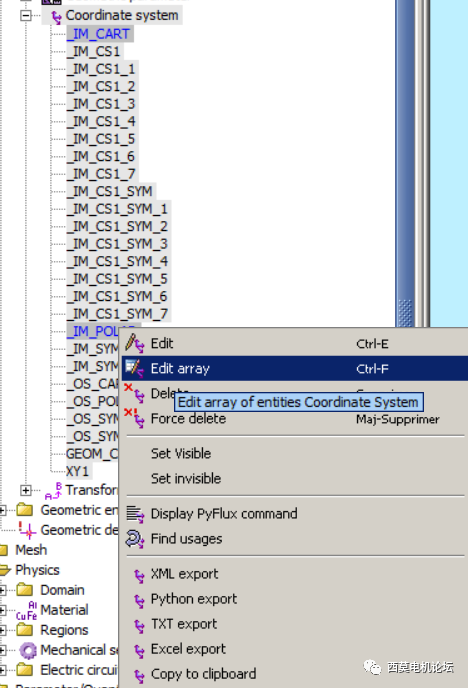
?
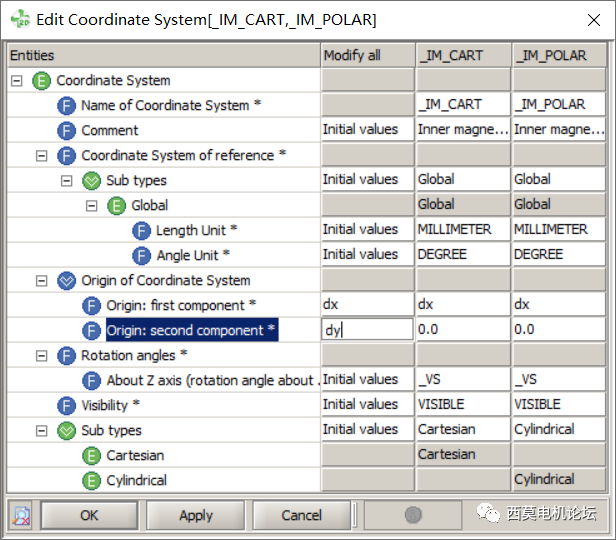
?
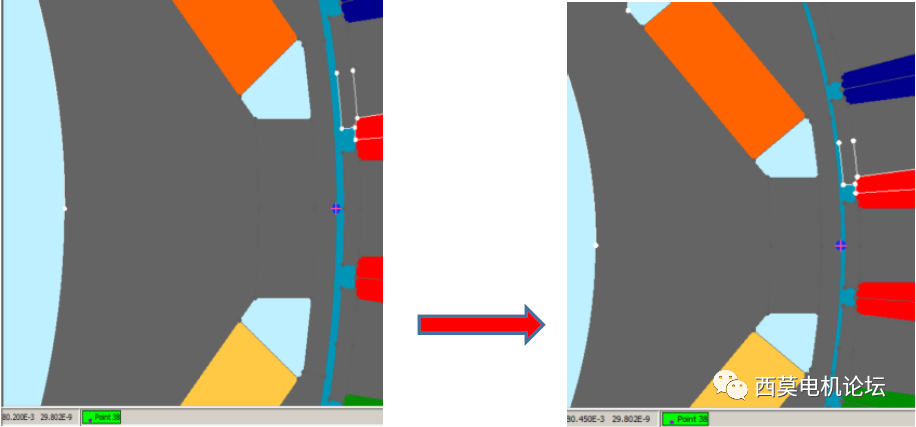
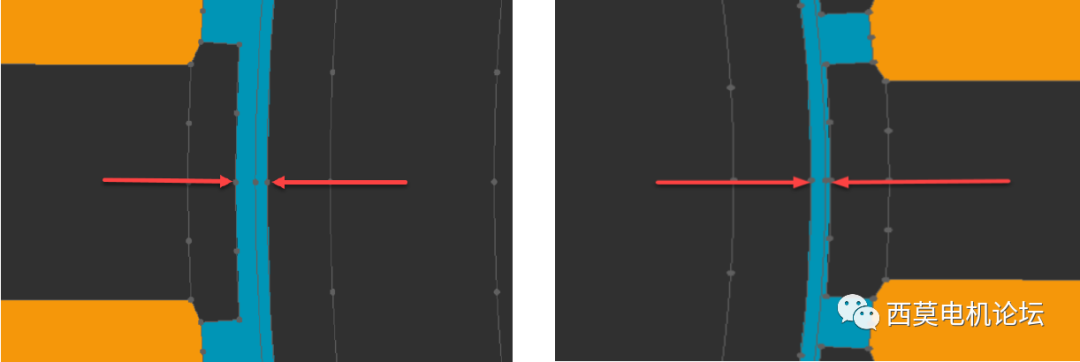
操作后轉(zhuǎn)子整體的幾何橫坐標(biāo)偏移了0.25mm。
這里需要注意偏移量DX、DY的最大值需要注意可能會(huì)出現(xiàn)幾何干涉問題。
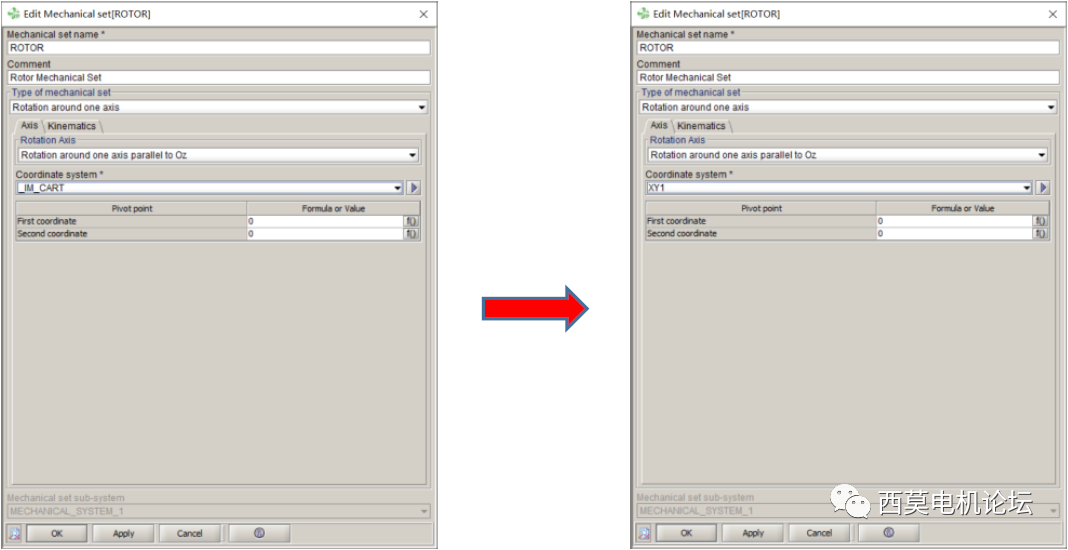
最后進(jìn)行靜偏心的機(jī)械設(shè)置修改和物理屬性設(shè)置。首先是通過Physics > Mechanical set >Rotor編輯,修改旋轉(zhuǎn)中心為_IM_CART。
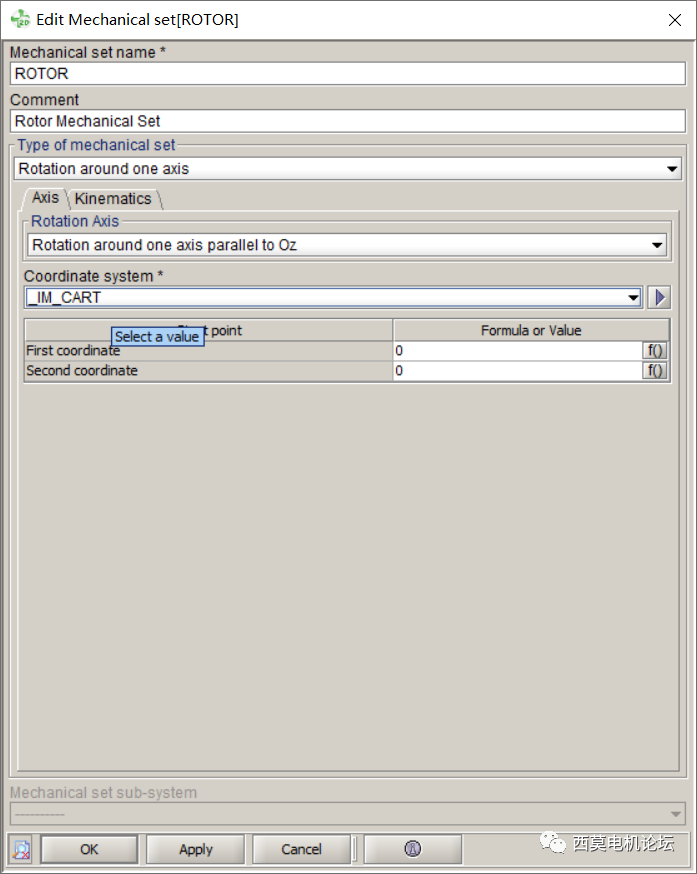
? 完成此步驟后,即完成了永磁同步電機(jī)的靜偏心工況設(shè)置。
3.2?靜偏心工況設(shè)定
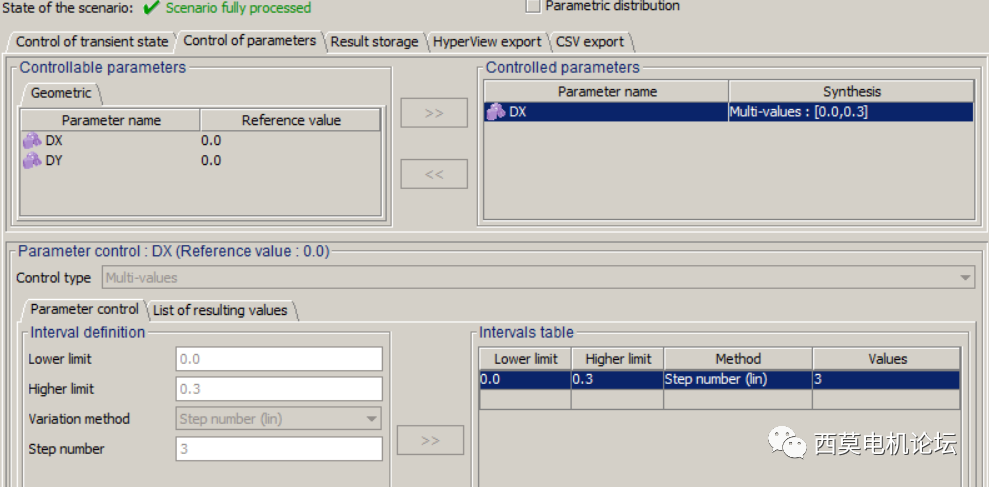
創(chuàng)建工況計(jì)算,Solver > Solving scenario > New, 工況計(jì)算中選擇至少一個(gè),在Control of parameters選擇偏移量DX、DY進(jìn)行偏移參數(shù)化計(jì)算。激活“Parametric distribution”選項(xiàng)可以利用Flux參數(shù)化分布式計(jì)算功能,加速多參數(shù)掃描分析過程。
3.3?數(shù)據(jù)后處理
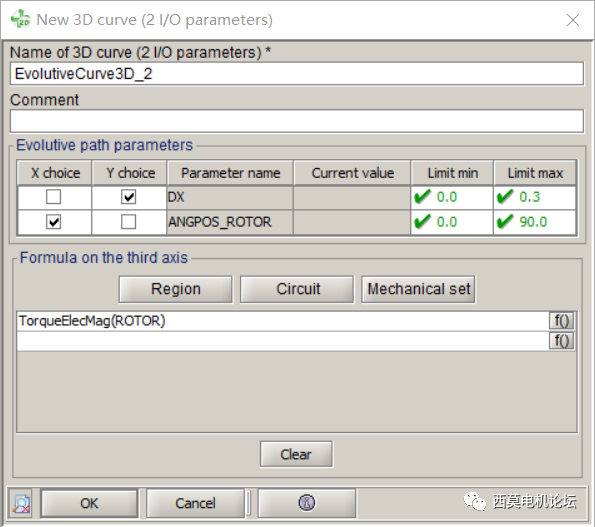
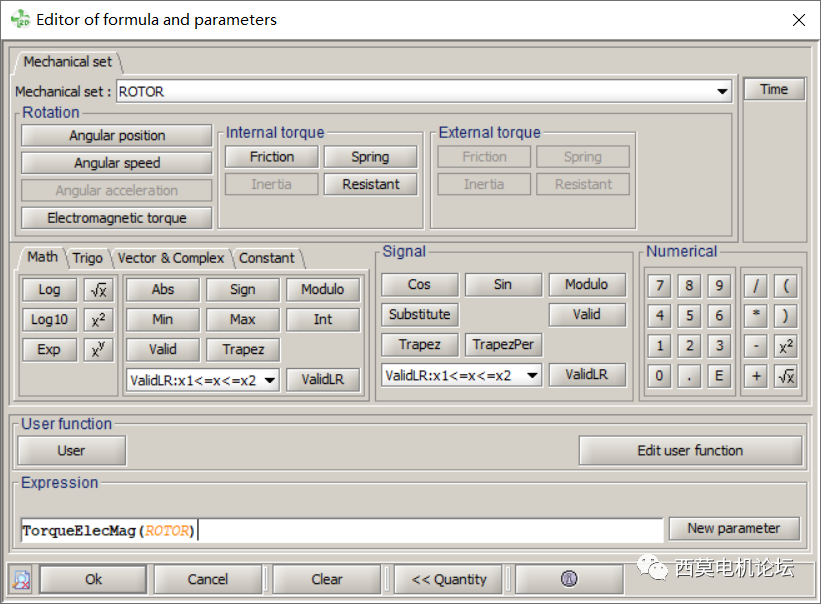
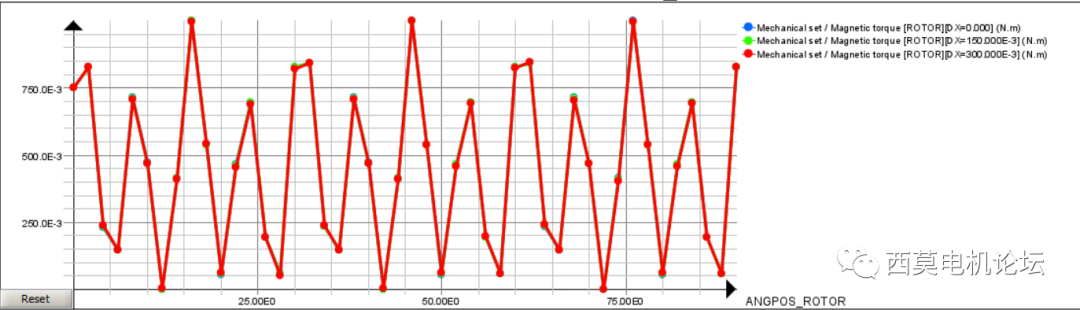
計(jì)算完成后,在左邊的Generaldata > Post processing > Curve > 3D curve(2 I/O parameter)獲取轉(zhuǎn)子靜偏心電磁轉(zhuǎn)矩曲線。
?
?
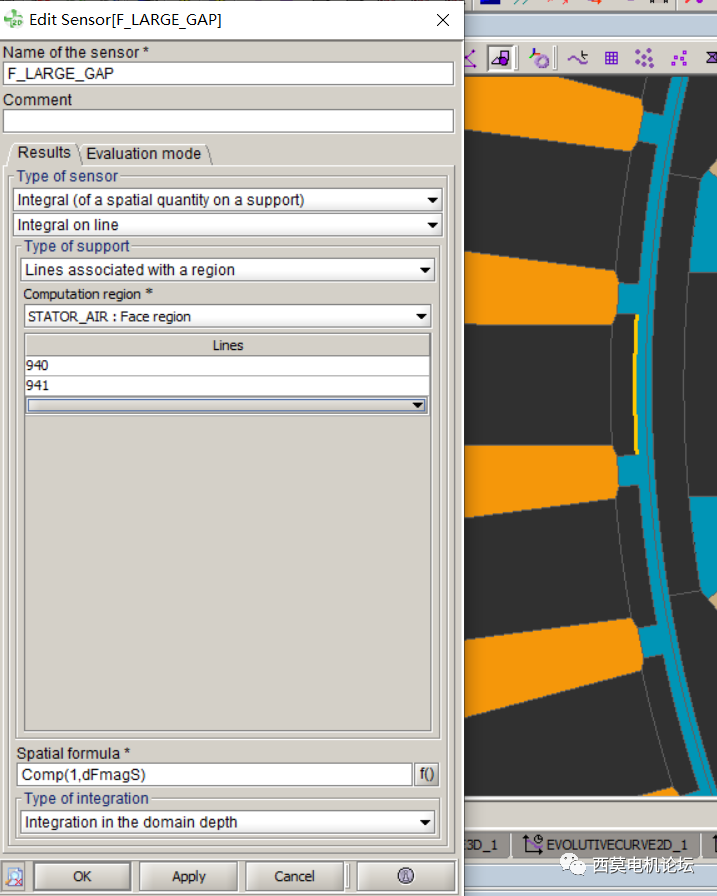
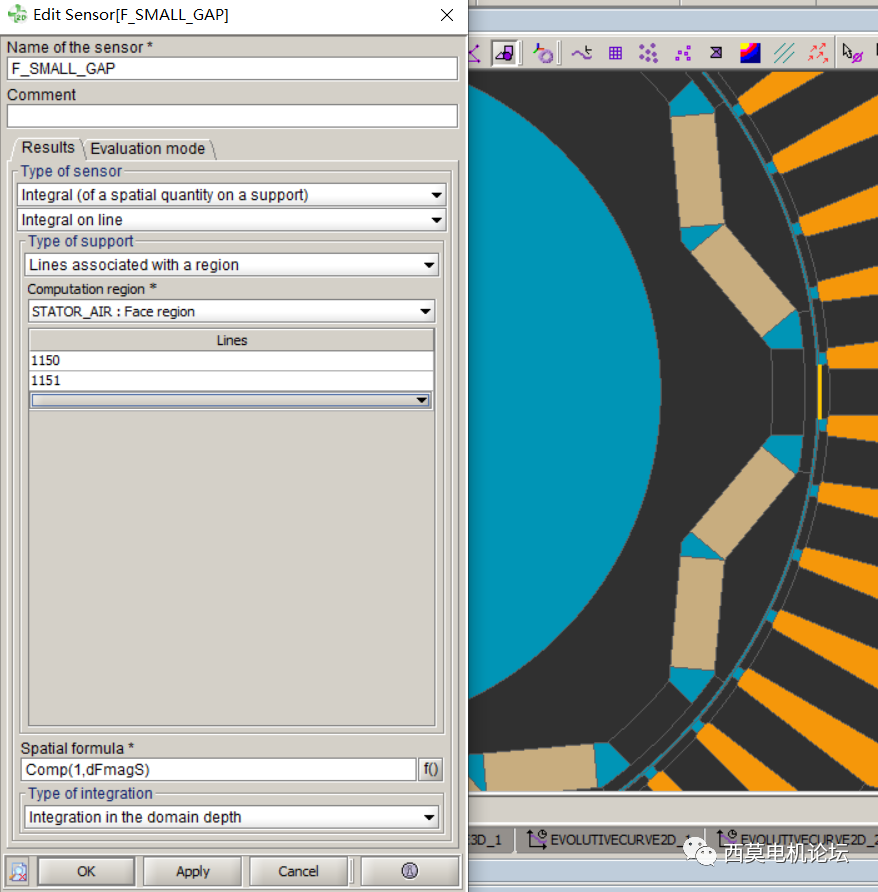
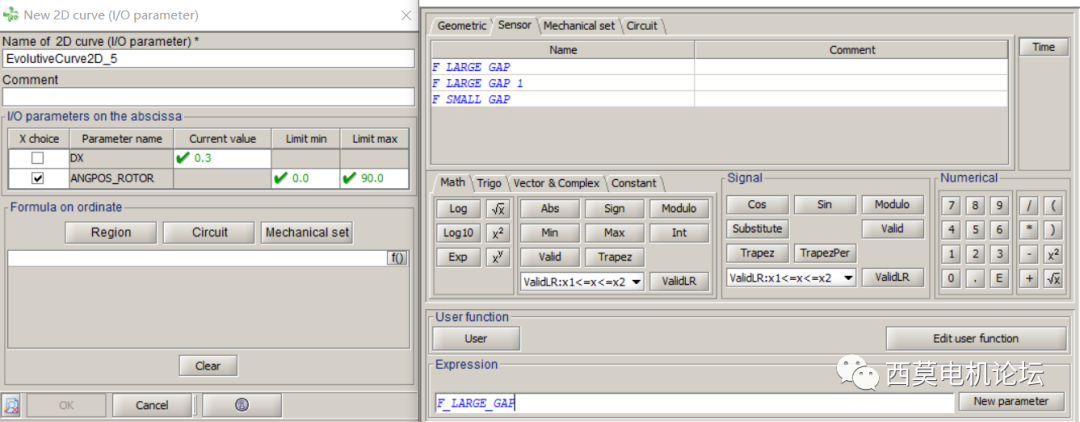
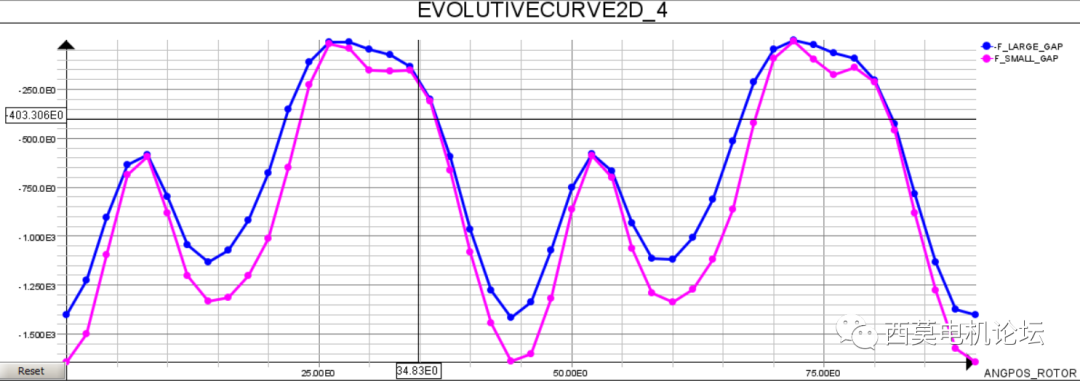
? 分析靜偏心齒部電磁力,點(diǎn)擊Parameter/Quantity > Sensor> New,創(chuàng)建偏移后最近和最遠(yuǎn)定子齒部電磁力計(jì)算。General data > Post processing> Curve > 2D curve(2 I/O parameter)獲取兩端電磁力曲線。
?
?
?
3.4?電機(jī)有限元模型動(dòng)偏心工況設(shè)定
關(guān)于動(dòng)偏心的設(shè)置,文本將討論兩種設(shè)置實(shí)現(xiàn)的路徑:
1)從靜偏心工況轉(zhuǎn)入動(dòng)偏心工況設(shè)置:
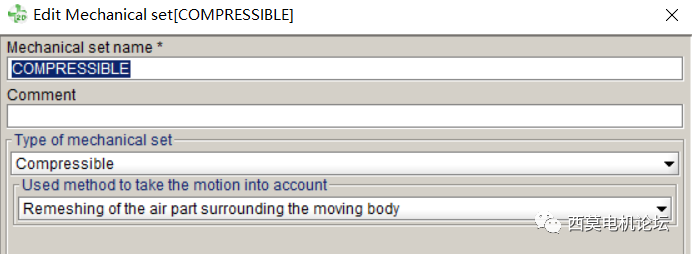
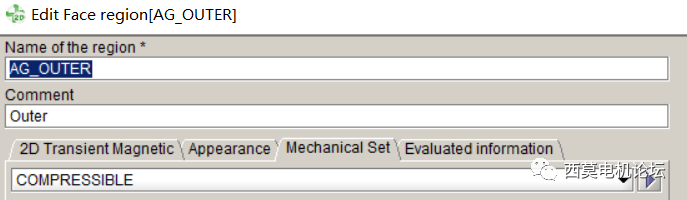
相對(duì)于靜偏心旋轉(zhuǎn)中心為轉(zhuǎn)子的幾何中心來說,動(dòng)偏心的旋轉(zhuǎn)中心是定子的幾何中心。在軟件中,只需要將基于靜偏心模型轉(zhuǎn)子旋轉(zhuǎn)的運(yùn)動(dòng)設(shè)置進(jìn)行修改為圍繞定子幾何中心旋轉(zhuǎn)的設(shè)置方式,但同時(shí)由于動(dòng)偏心轉(zhuǎn)子對(duì)空氣擠壓,需將定子側(cè)空氣改為可擠壓的運(yùn)動(dòng)方式。
?
?
2)從FluxMotor導(dǎo)入的.py文件開始進(jìn)行動(dòng)偏心工況設(shè)置:
首先刪除模型網(wǎng)格,進(jìn)入sketch對(duì)模型轉(zhuǎn)子進(jìn)行偏移設(shè)置,這里偏移設(shè)置和靜偏心轉(zhuǎn)子幾何偏移一樣,唯一區(qū)別在于滑移邊界圓模型不需要進(jìn)行偏移設(shè)置。(需要注意的是偏移量DX、DY的最大值上可能會(huì)出現(xiàn)模型幾何干涉問題,需確保滑移邊界圓足夠包含偏心模型)
步驟同樣是建立幾何偏移參數(shù)DX、DY(參考文中操作),對(duì)坐標(biāo)系_IM_CART和_IM_POLAR進(jìn)行偏移設(shè)置,即完成了所有的動(dòng)偏心設(shè)置。
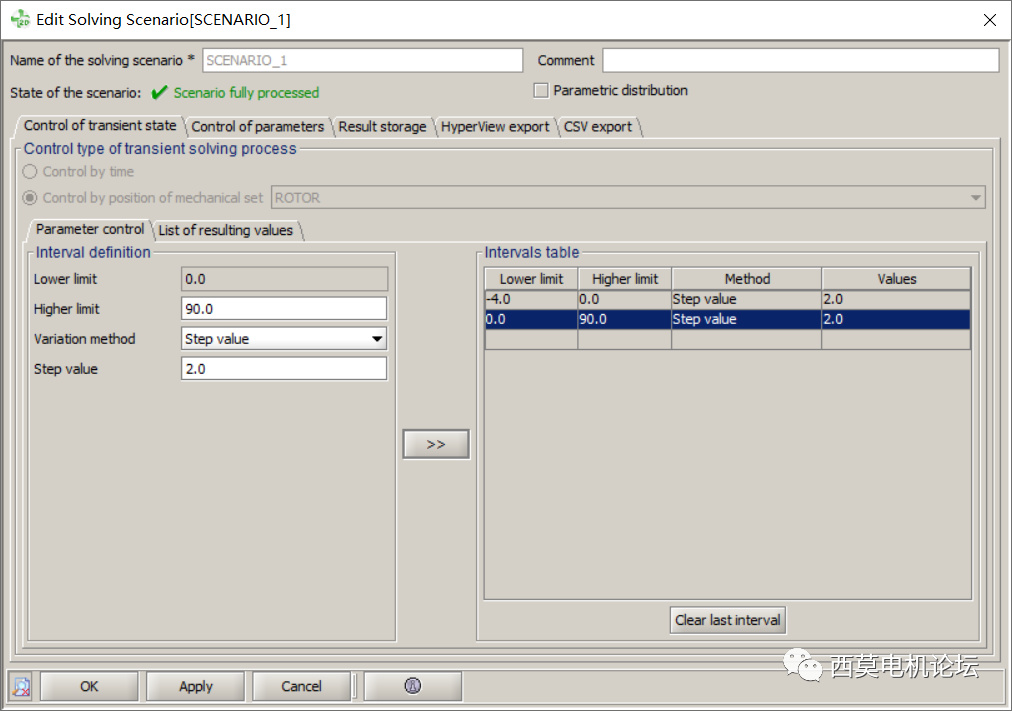
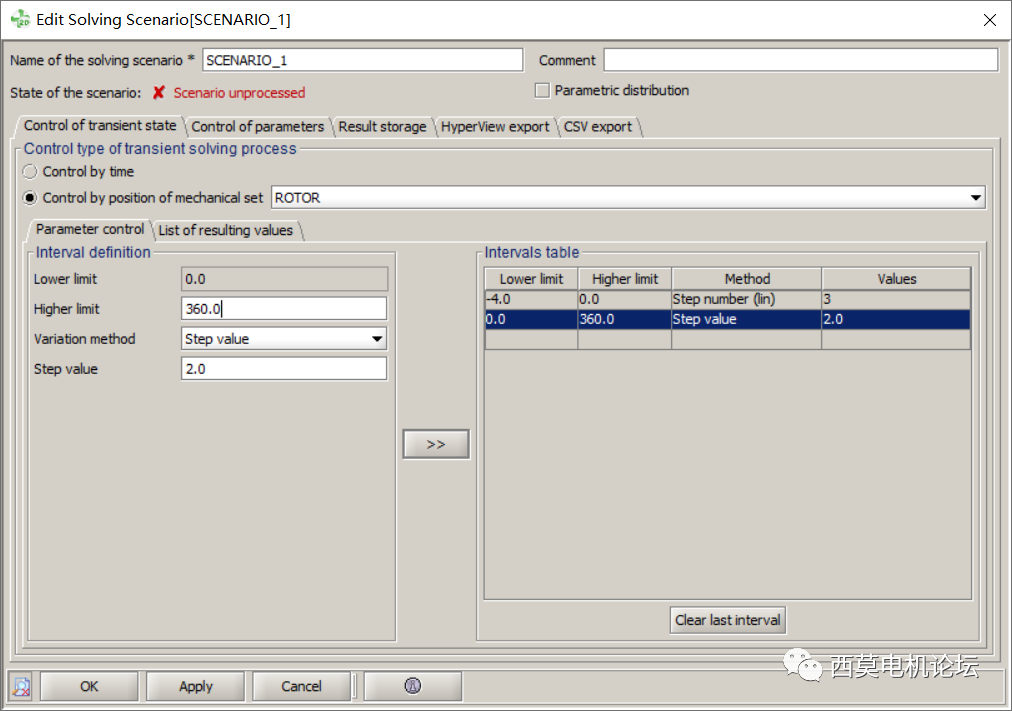
? 不過在動(dòng)偏心上由于轉(zhuǎn)子的中心旋轉(zhuǎn)軸在電機(jī)幾何中心處,其一個(gè)周期的仿真是一個(gè)機(jī)械周期,這里在設(shè)定求解時(shí)需要注意,即機(jī)械角度0°至360°。
? 同樣,計(jì)算完成后,在左邊的General data > Post processing> Curve > 3D curve(2 I/O parameter)獲取轉(zhuǎn)子動(dòng)偏心電磁轉(zhuǎn)矩曲線。
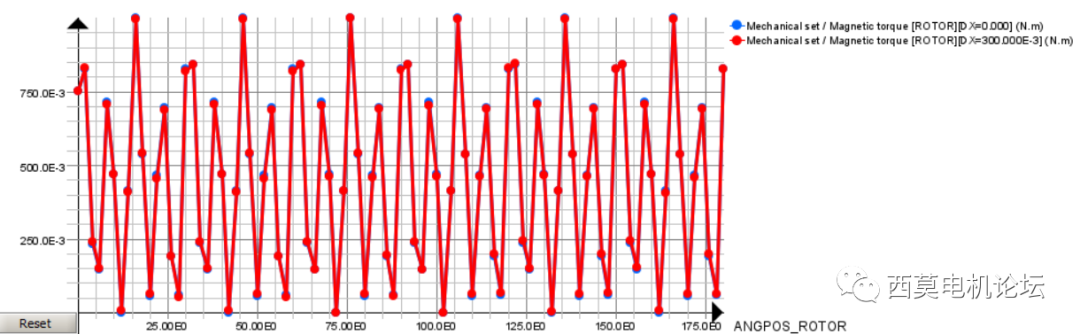
? 點(diǎn)擊General data > Post processing > Curve> 2D curve(2 I/O parameter)獲取轉(zhuǎn)子動(dòng)偏心電磁轉(zhuǎn)矩曲線,雙擊生成曲線獲得具體的轉(zhuǎn)子轉(zhuǎn)矩信息。

4?結(jié)論
本文主要介紹了電機(jī)偏心問題的類型,以及如何利用Flux軟件設(shè)置永磁同步電機(jī)動(dòng)偏心和靜偏心工況所需要的設(shè)置和偏心的后處理過程,能夠適用于電機(jī)設(shè)計(jì)前期對(duì)偏心故障模式下電機(jī)運(yùn)行特性及相關(guān)性能的估算。本文在基于電機(jī)二維模型的動(dòng)偏心模式的設(shè)置包含了compressbile的運(yùn)動(dòng)模式(實(shí)現(xiàn)路徑A),這是基于靜偏心模型修改了轉(zhuǎn)子空氣氣隙的幾何中心后所需要的設(shè)置條件,如果根據(jù)動(dòng)偏心旋轉(zhuǎn)空氣適當(dāng)調(diào)整,將動(dòng)偏心旋轉(zhuǎn)空氣幾何中心與定子幾何中心重合,則定子側(cè)的空氣運(yùn)動(dòng)模式可從compressible模式改為fixed模式,加快計(jì)算速度(實(shí)現(xiàn)路徑2)。
編輯:黃飛
?











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論