 電子發(fā)燒友App
電子發(fā)燒友App


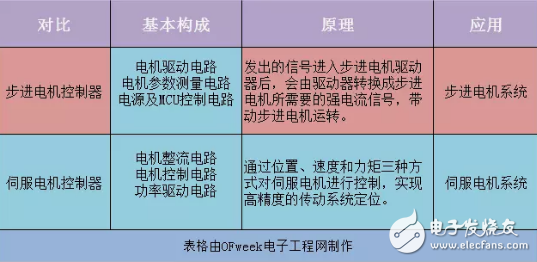
伺服控制
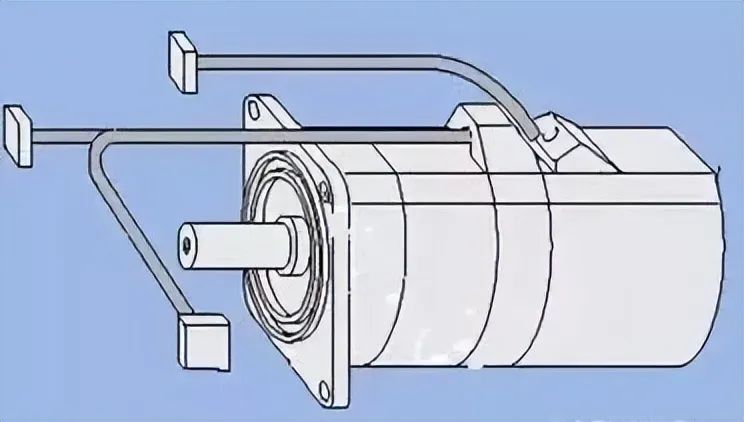
伺服電機內部的轉子是永磁鐵,驅動器控制的U/V/W三相電形成電磁場,轉子在此磁場的作用下轉動,同時電機自帶的編碼器反饋信號給驅動器,驅動器根據(jù)反饋值與目標值進行比較,調整轉子轉動的角度。伺服電機的精度決定于編碼器的精度(線數(shù))。
2、伺服系統(tǒng)的組成及分類
組成:
伺服系統(tǒng)是以位置和角度為控制量的控制系統(tǒng)的總稱,與位置和角度相關聯(lián)的速度、角速度、加速度、力等為控制量的系統(tǒng)也包含在伺服系統(tǒng)內。
分類:
1. 按控制結構分類分為:開環(huán)式、閉環(huán)式。
2. 按驅動部件分類分為:
a. 步進電動機伺服系統(tǒng)。
b. 直流電動機伺服系統(tǒng)。
c. 交流電動機伺服系統(tǒng)。
3、伺服馬達(交流)的特點
1. 定位精度高,普通伺服馬達可達到0.036度
2. 回應時間快。
3. 控制方便靈活,控制系統(tǒng)易于實現(xiàn)。
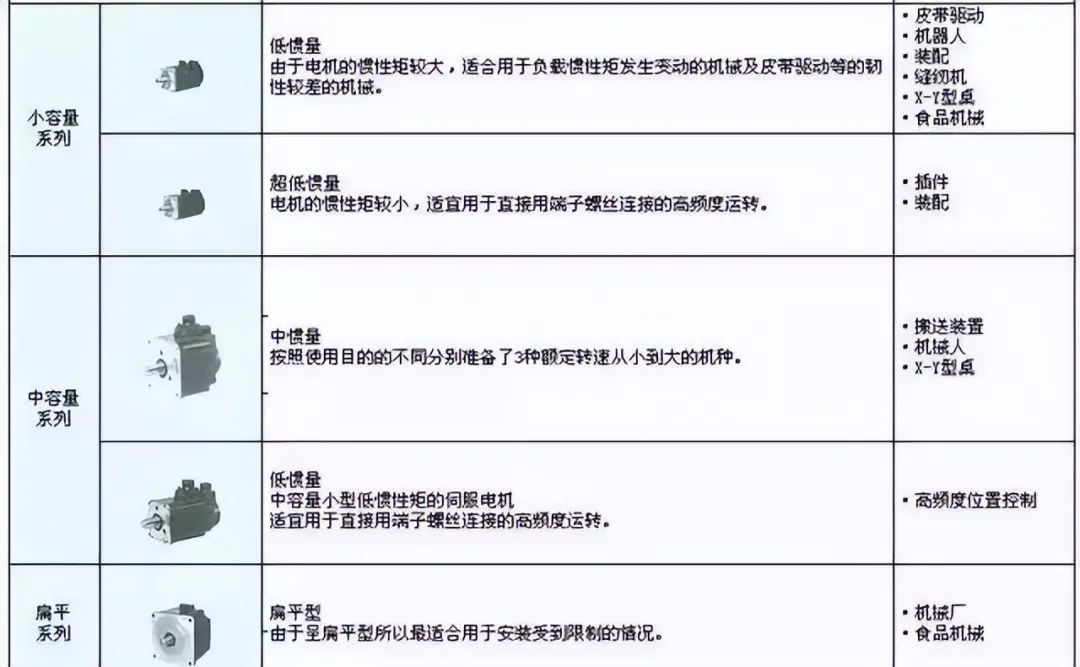
4. 型號較多,可根據(jù)不同的應用環(huán)境選擇不同的類型。
5. 提供全閉環(huán)控制,可適時監(jiān)控運行狀況,進行適當?shù)恼{整變換。
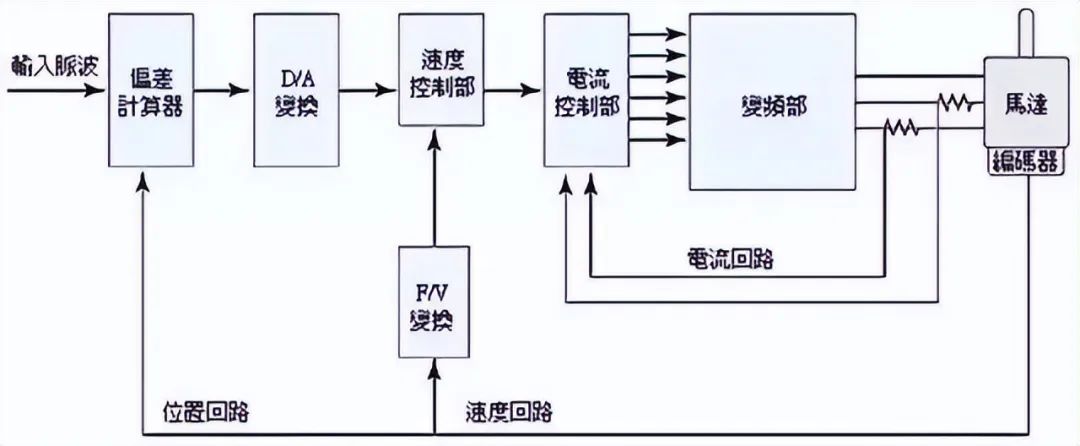
4、伺服系統(tǒng)結構
5、伺服控制的選型步驟
2. 確認動作參數(shù),移動速度、行程、加減速時間、周期、精度等。
3. 選擇馬達慣量,負載慣量、馬達軸心轉換慣量、轉子慣量。
4. 選擇馬達回轉速度。
5. 選擇馬達額定扭矩。負載扭矩、加減速扭矩、瞬間最大扭矩、實效扭矩。
6. 選擇馬達機械位置解析度。
7. 根據(jù)以上選擇馬達型號。
6、伺服控制的應用
步進控制
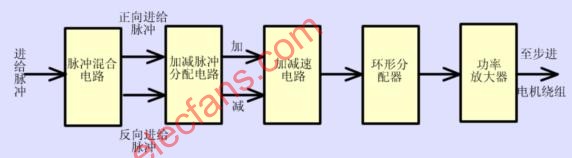
1、步進電機的工作原理
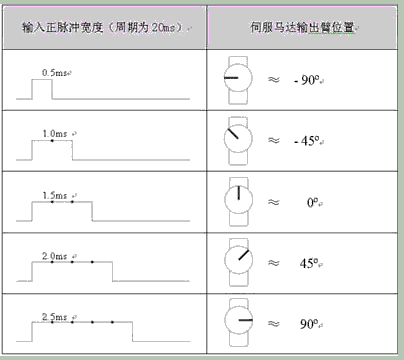
步進電機是一種將電脈沖轉化為角位移的執(zhí)行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數(shù)來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。步進電機可以作為一種控制用的特種電機,利用其沒有積累誤差(精度為100%)的特點,廣泛應用于各種開環(huán)控制。
2、步進電機的分類
現(xiàn)在比較常用的步進電機包括反應式步進電機(VR)、永磁式步進電機(PM)、混合式步進電機(HB)和單相式步進電機等。
永磁式步進電機一般為兩相,轉矩和體積較小,步進角一般為7.5度 或15度;
反應式步進電機一般為三相,可實現(xiàn)大轉矩輸出,步進角一般為1.5度,但噪聲和振動都很大。反應式步進電機的轉子磁路由軟磁材料制成,定子上有多相勵磁繞組,利用磁導的變化產生轉矩。
混合式步進電機是指混合了永磁式和反應式的優(yōu)點。它又分為兩相和五相:兩相步進角一般為1.8度而五相步進角一般為 0.72度。這種步進電機的應用最為廣泛。
3、步進電機系統(tǒng)

1. 步進電機的靜態(tài)指標術語
a. 相數(shù):產生不同對極N、S磁場的激磁線圈對數(shù)。常用m表示。
b.拍數(shù):完成一個磁場周期性變化所需脈沖數(shù)或導電狀態(tài)用n表示,或指電機轉過一 個齒距角所需脈沖數(shù) 。
c. 步距角:對應一個脈沖信號,電機轉子轉過的角位移用θ表示。
d. 定位轉矩:電機在不通電狀態(tài)下,電機轉子自身的鎖定力矩(由磁場齒形的諧波以 及機械誤差造成的)。
e. 靜轉矩:電機在額定靜態(tài)電作用下,電機不作旋轉運動時,電機轉軸的鎖定力矩。
2. 步進電機動態(tài)指標及術語
a. 步距角精度:步進電機每轉過一個步距角的實際值與理論值的誤差。
b. 失步:電機運轉時運轉的步數(shù),不等于理論上的步數(shù)。稱之為失步。
c. 失調角:轉子齒軸線偏移定子齒軸線的角度 。
d. 最大空載起動頻率:電機在某種驅動形式、電壓及額定電流下,在不加負載的情況下,能夠直接起動的最大頻率。
e. 最大空載的運行頻率:電機在某種驅動形式,電壓及額定電流下,電機不帶負載的最高轉速頻率。
f. 運行矩頻特性:電機在某種測試條件下測得運行中輸出力矩與頻率關系的曲線稱為運行矩頻特性 。
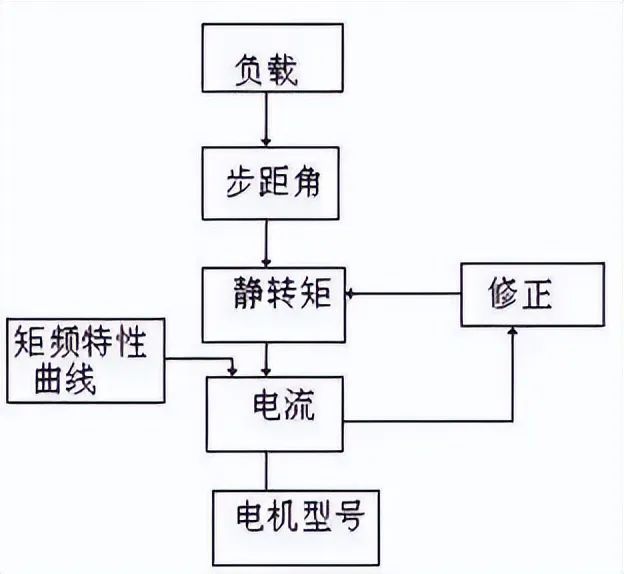
4、步進電機選型
1. 步距角的選擇:電機的步距角取決于負載精度的要求 。
2. 靜力矩的選擇:靜力矩選擇的依據(jù)是電機工作的負載 ,一般情況下,靜力矩應為摩擦負載的2-3倍內最好 。
3. 電流的選擇:由于電流參數(shù)不同,其運行特性差別很大,可依據(jù)矩頻特性曲線圖,判斷電機的電流。
5、步進電機的一些特點
1. 一般步進電機的精度為步進角的3-5%,且不累積。
2. 步進電機外表允許的最高溫度一般在攝氏130度以上 。
3. 步進電機的力矩會隨轉速的升高而下降。
4. 步進電機低速時可以正常運轉,但若高于 一定速度就無法啟動,并伴有嘯叫聲。
5. 步進電機應用于低速場合---每分鐘轉速不超過1000轉。
6、兩種電機之性能比較
1. 控制精度不同五相混合式步進電機步距角一般為0.72 °、0.36°交流伺服電機的控制精度由電機軸后端的旋轉編碼器保證 ,對于帶標準2500線編碼器的電機而言,其脈沖當量為360°/10000=0.036°,伺服電機精度要比步進馬達高。
2. 低頻特性不同步進電機在低速時易出現(xiàn)低頻振動現(xiàn)象。交流伺服電機運轉非常平穩(wěn),即使在低速時也不會出現(xiàn)振動現(xiàn)象。
3. 過載能力不同步進電機一般不具有過載能力。交流伺服電機具有較強的過載能力 。
4. 運行性能不同步進電機的控制為開環(huán)控制,啟動頻率過高或負載過大易出現(xiàn)丟步或堵轉的現(xiàn)象,停止時轉速過高易出現(xiàn)過沖的現(xiàn)象,交流伺服驅動系統(tǒng)為閉環(huán)控制,驅動器可直接對電機編碼器反饋信號進行采樣,內部構成位置環(huán)和速度環(huán),一般不會出現(xiàn)步進電機的丟步或過沖的現(xiàn)象,控制性能更為可靠。
5. 速度響應性能不同步進電機從靜止加速到工作轉速(一般為每分鐘幾百轉)需要200~400毫秒。交流伺服系統(tǒng)的加速性能較好,以松下MSMA 400W交流伺服電機為例,從靜止加速到其額定轉速3000RPM僅需幾毫秒,可用于要求快速啟停的控制場合
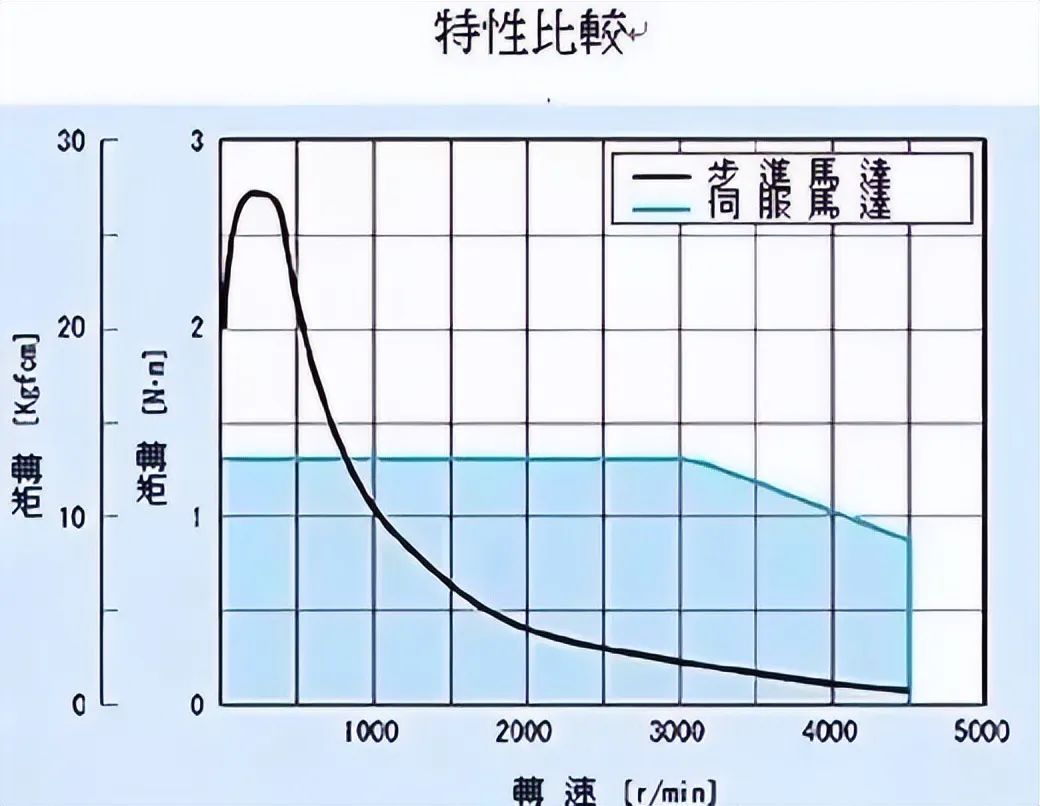
6. 矩頻特性不同步進電機的輸出力矩隨轉速升高而下降,且在較高轉速時會急劇下降,交流伺服電機為恒力矩輸出。
綜上所述,交流伺服系統(tǒng)在許多性能方面都優(yōu)于步進電機。但在一些要求不高的場合也經常用步進電機來做執(zhí)行電動機。所以,在控制系統(tǒng)的設計過程中要綜合考慮控制要求、成本等多方面的因素,選用適當?shù)目刂齐姍C。
變頻控制
1、通用電機介紹
三相鼠籠式交流電機是感應電機中最常見的一種,其構造及特性如下:

感應電機的構造示意圖
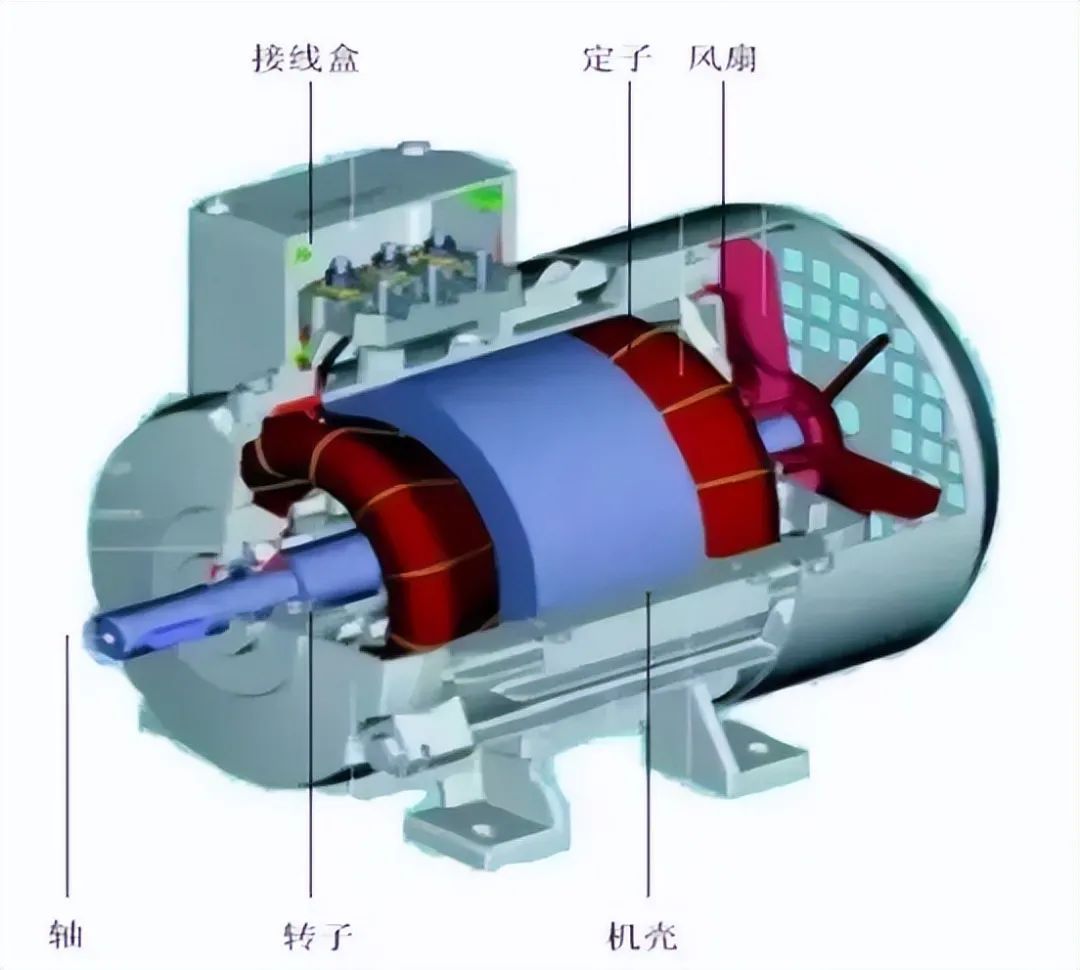
電機的構造示意圖
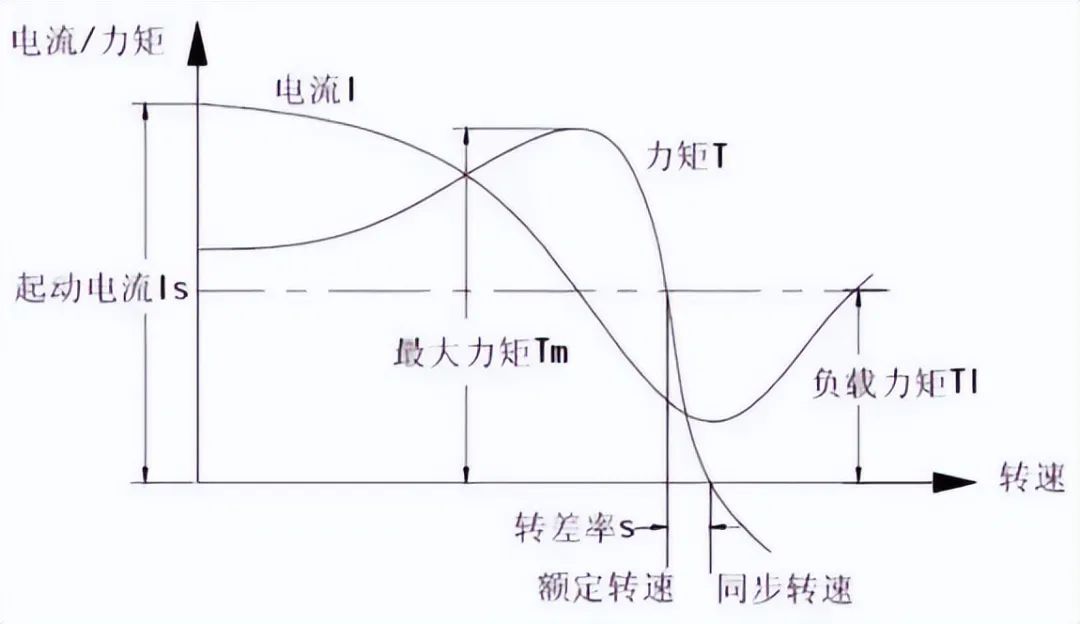
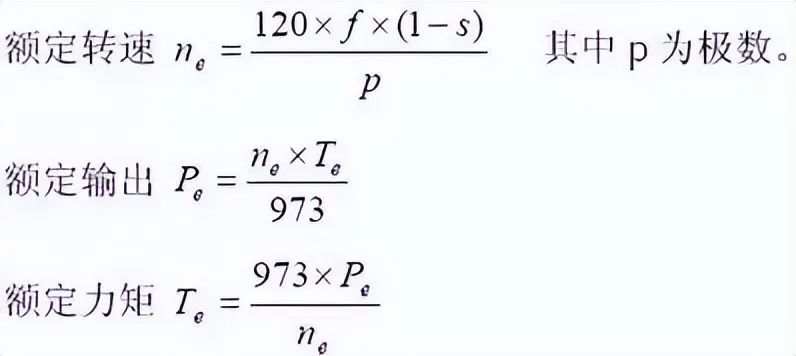
電機的特性
2、變頻器原理與構成
變頻器是能夠簡單、自由地改變交流電機轉速的一種控制裝置。改變交流電機轉速的方法如下。變頻器是通過改變交流電機電源頻率實現(xiàn)調速的:
變頻器的構成如下:
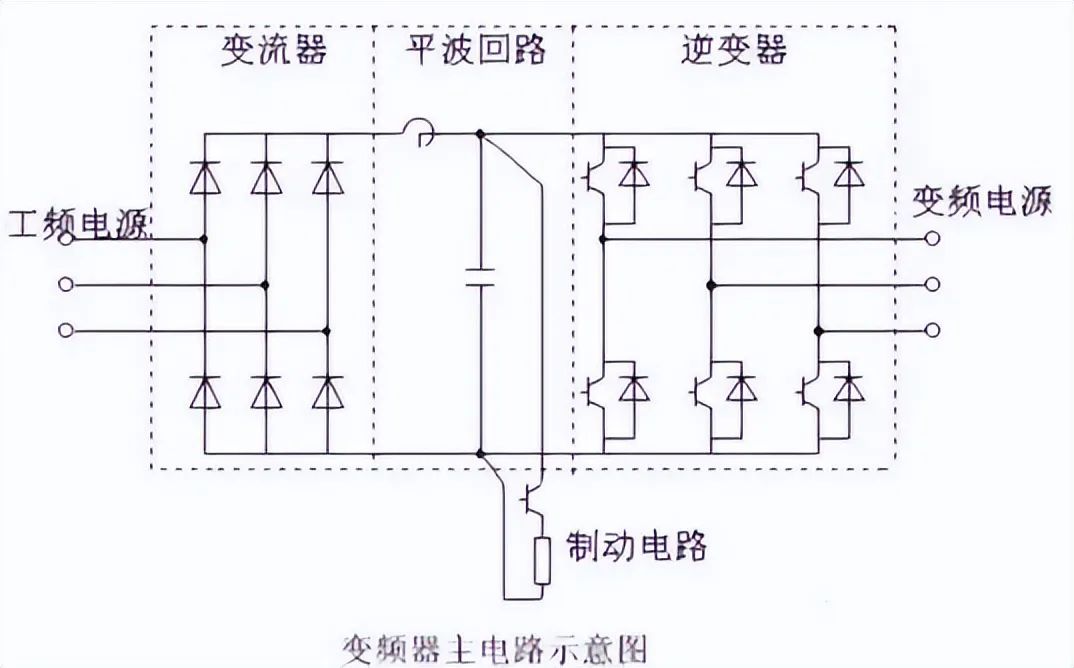
1. 變流器(整流器)大量使用的是二極管橋整流器,如圖1 所示,它把工頻電源變換為直流電源。也可用兩組晶體管變流器構成可逆變流器,由于其功率方向可逆,可以進行再生運轉。
2. 平波回路在整流器整流后的直流電壓中,含有電源6 倍頻率的脈動電壓,此外逆變器產生的脈動電流也使直流電壓變動。為了抑制電壓波動,采用電感和電容吸收脈動電壓(電流)。裝置容量小時,如果電源和主電路構成器件有余量,可以省去電感,采用簡單的平波回路。
3. 逆變器同整流器相反,逆變器是將直流功率變換為所要求頻率的交流功率,以所確定的時間使6 個開關器件導通、關斷就可以得到3 相交流輸出。
4. 制動回路異步電動機在再生制動區(qū)域使用時(轉差率為負),再生能量存于平波回路電容器中,使直流電壓升高。一般說來,由機械系統(tǒng)(含電動機)慣量積累的能量比電容能儲存的能量大,需要快速制動時,可用可逆變流器向電源反饋或設置制動回路(開關和電阻)把再生功率消耗掉,以免直流電路電壓上升。
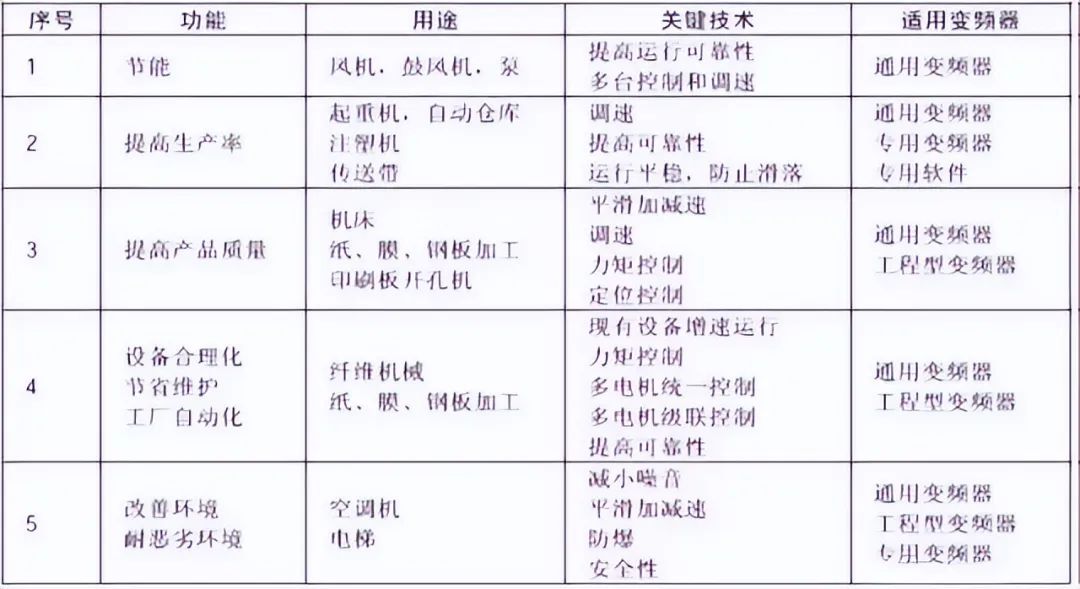
3、變頻器的應用目的及用途
變頻器和交流電機構成的可調速傳動稱為變頻器傳動,其功能用途如下。其中可能互為關聯(lián),實際上無明確分類,此表僅作參考。
審核編輯:湯梓紅
?















 工商網監(jiān)
工商網監(jiān)
評論