 電子發燒友App
電子發燒友App


電機最早出現在十八世紀,之后迅速全面普及,根據國際能源署 IEA-4E 組織 EMSA 數據,其消耗了全球生產能源的一半以上,數據來源:Electric Motor Systems - 4E Energy Efficient End-use Equipment (iea-4e.org)。國際能源署(IEA) 也表示,通常 95% 的電機生命周期成本,來自為其提供動力的電力,因此任何能夠提高電機運行效率的技術方法都會受市場歡迎。
“智能” 控制就可以做到這一點,它不僅使電機在工作中更加靈活、高效,還能降低運行成本和能源消耗,減少環境影響或延長電池壽命。
此外還通過立法促使解決這個問題。例如,IEC 60034-30-1 規定了由電網側供電的交流電機應達到的能效等級。
常用的電機類型
根據應用場景的不同,使用的電機類型也各種各樣。
以一個典型的西方富裕家庭為例,Qorvo 估計這個家里可能有 14 臺有刷直流電機、26 臺無刷直流電機、48 臺交流感應電機和 4 臺通用交流-直流電機。總共有 31 個電池供電和 61 個電網供電。
交流感應電機相對簡單且可靠,因此在家用市場和工業領城均占主導地位。
正常情況下,它們成本低,沒有電刷磨損,速度有一些 “轉速差”,也就是說,它們幾乎與交流驅動同頻或是其的倍頻。
單相電機需要特殊的啟動方法,效率不高,但用途廣泛,而三相電機支持自啟動,運行效率更高,使交流感應電機非常適合泵和風扇等恒定負載/速度應用。
如果需要變速,可以使用變頻驅動 (VFD),但在 “標準” 電機中添加變頻驅動功能時,可能會出現絕緣應力、EMI 和共模電流流過電機本體等問題。
對于直流或通用交流轉直流電源,電機旋轉時,其電刷通過依次給線圈通電來強制換向和旋轉。這些電機成本低,性能優,啟動轉矩大,因此在小型工具和電器中很受歡迎。
然而,電刷確實會磨損,而且通常產生高壓電弧和可聽噪音。通過改變直流或交流電源電壓,或通過交流相位角控制來實現具有可選閉環調節的速度控制,這些通常效率較差,但為勵磁線圈分接開關提供了可能。
目前常用的電機類型是無刷直流電機 (BLDC),是基于有刷直流電機改進而來,可以去除電刷。
此類電機的性能更好,效率更高,壽命更長。
缺點是必須由 VFD(交頻驅動)提供多相交流電源,但確實可提供速度和轉矩控制,并根據負載要求調整這些參數,從而節省能源、提升工藝效率,以上這些優點可以迅速抵消 VFD 的初始成本。因此,BLDC 電機在電池供電型手持工具以及交流電源 (輸入經整流和功率因數校正后作為 VFD 電源)供電的電器中頗受青睞。

圖 1. 相同機架尺寸的電機性能比較(來源:Groschopp)
上述部分電機類型的主要特性如圖 1 所示,所有電機的物理尺寸相同。
BLDC電機
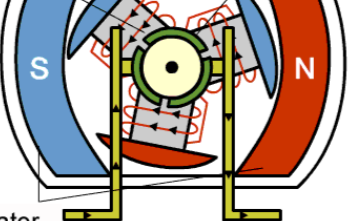
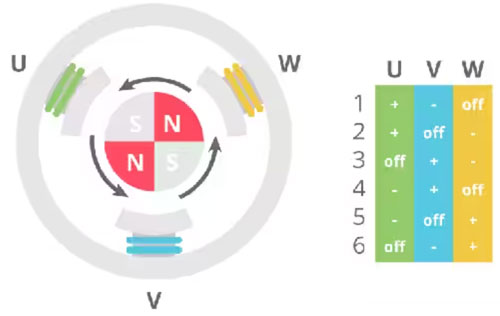
現在來觀察分析 BLDC 電機及其驅動,圖 2 顯示了三相電機的線圈通電順序。
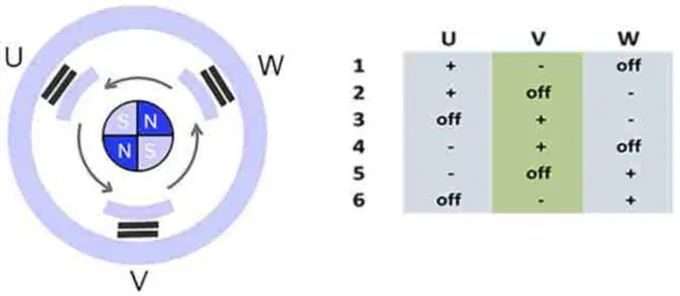
圖 2. 一個簡單的三相 BLDC 電機與驅動開關的順序
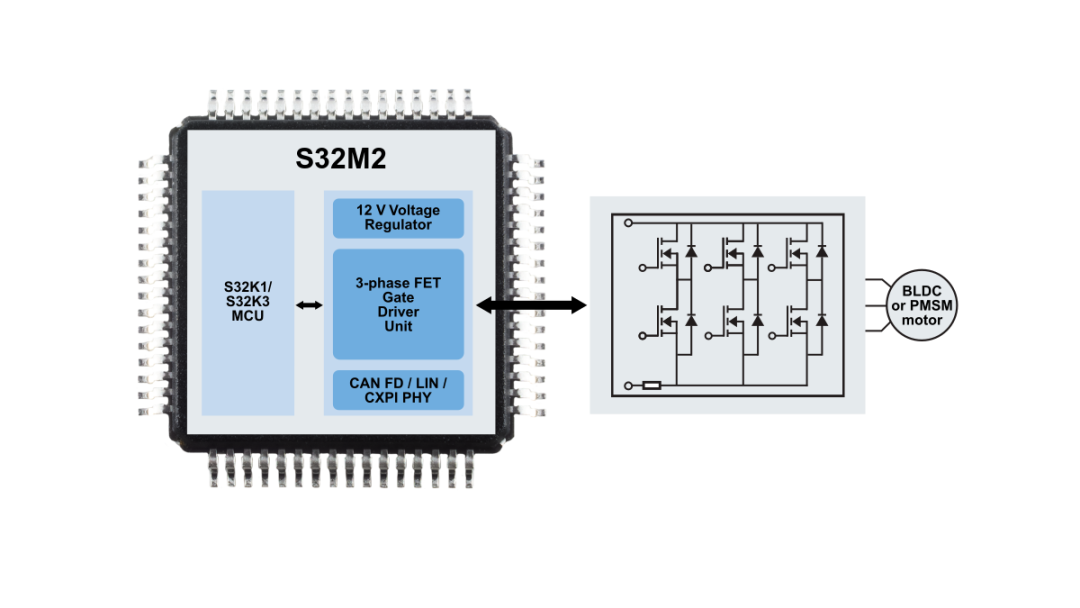
施加電壓存在一定的 “死區” 時間,原因在于開關的橋式布局(圖 3)可以是 IGBT 或 MOSFET,但越來多的使用 SiC FET 這樣的寬帶隙器件(如圖所示)。當電機旋轉時,開關管的切換由軸傳感器或其它方法觸發,轉子角度、速度和電流的反饋可用于控制轉矩和轉矩波動,這會導致不必要的振動。
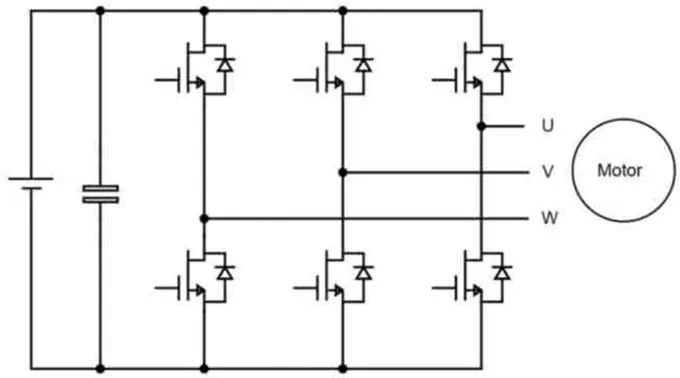
圖 3. BLDC 電機有三相橋式開關驅動,以 Qorvo SiC FET為例
如果沒有反饋,電機將旋轉達到系統延遲和線圈電感允許的最大速度,隨著轉速增加,每一個較短周期的開關動作都會降低峰值電流,從而使轉矩減小。
在實現 BLDC 電機控制的過程中涉及許多變量,包括所需的最大和間歇轉矩、功率、速度范圍、工作電壓、反饋傳感器類型及其電壓等級等等。
這些定義了驅動所需的電壓和頻率范圍,及其峰值和連續額定功率,包括故障和過載。
控制器獲取相應的反饋和狀態信息,并通過算法根據時序和載波頻率調制向開關提供優化的柵極驅動信號,以設定速度和轉矩。
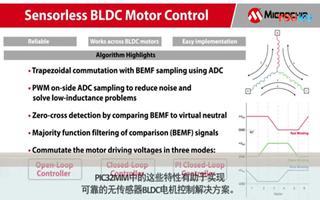
BLDC電機的控制
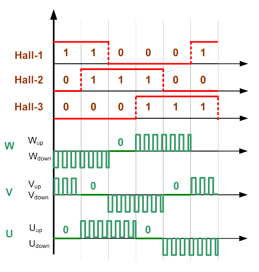
三相 BLDC 電機可以將線圈分段控制,任何時候都保持兩個線圈通電,第三個線圈 “懸空”。懸空繞組以梯形波形顯示反電動勢(圖 4,左),其過零點可用于確定轉子的角度位置,這種方法成本低、精度高,但霍爾效應傳感器允許在重載條件下啟動,這種響應很難通過傳統的無傳感器算法獲得。
從機械角度看,分離式線圈是非常簡單的布局,但確實會產生一些轉矩波動。
如果將線圈繞在定子周圍,反電動勢可以是正弦波(圖 4,右),理論上沒有轉矩波動。
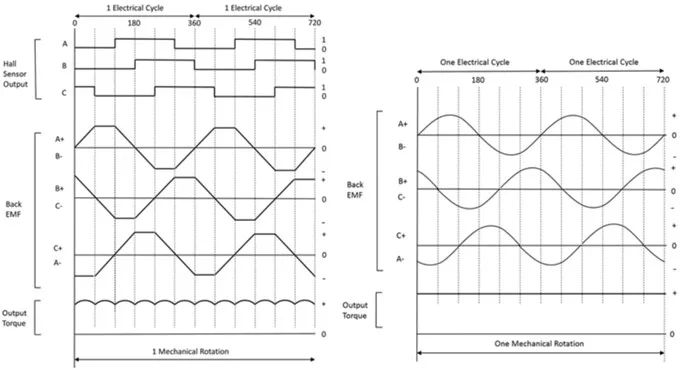
圖 4. BLDC 和永磁同步電機的反電動勢和 PWM 驅動波形
在實踐中,可以達到 1% 左右,但峰值轉矩和功率密度低于梯形反電動勢。
這種布局就是 “永磁同步電機”(PMSM),要求所有的繞組在任何時候都要通電,因此浮動繞組的位置信息不可用,通常需要一個單獨的軸傳感器。
無論哪種情況,PWM 驅動調制都會設置為分別與梯形或正弦匹配,以獲得最佳性能。
六步梯形波控制更容易實現,能夠以高轉矩啟動,并適用于非常高的速度,比如在電動工具中就很有用。
基本形式的 PMSM,其制造成本較高,啟動轉矩較低,驅動更復雜,但速度控制更穩定,適合換氣風扇等應用。
有些方案從梯形波驅動啟動,并隨電機旋轉切換到正弦驅動,為了獲得最佳性能,可將光學編碼器或旋轉變壓器用于 PMSM,以取代霍爾傳感器。
磁場定向貨矢量控制
為了利用 PMSM 實現更優性能,可以使用 “矢量” 或 “磁場定向控制” (FOC)。
對于使用能耗更低的小型電機,這有助于實現零速滿轉矩啟動、平穩運行、快速加速/ 減速和更好的精度。
傳感器可以提供轉子位置反饋,或者采用 “無傳感器” 方案,通過電機特性模型使用繞組電流和電壓。
然而,FOC(磁場定向控制)很復雜,需要較強的數字處理能力,問題在于啟動時無法獲取轉子位置信息,因此,在傳感器提供有效反饋之前,通常會應用開環初始驅動。為了提供出色的性能,FOC 需要從轉子位置和繞組電流中得出磁鏈和轉矩值。
通過 “克拉克變換” 方法將三相繞組電流轉換為兩相等效電流,然后使用 “帕克變換” 和旋轉角度計算旋轉坐標,從而得出控制參數、磁鏈和轉矩。
將目標值與補償反鎖信號比較,其差值送入比例 -積分 (PI) 控制器。
該信號通過反向克拉克和帕克變換過程,為橋式驅動電路中的開關產生驅動信號,應用 PWM 以形成正弦電流,其有效值對應于所需轉矩。圖 5 為該方案示意圖。
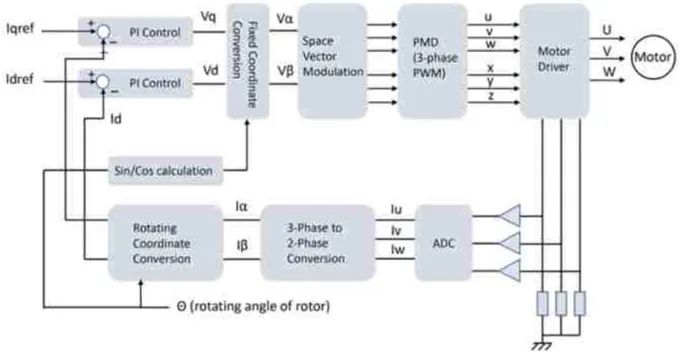
圖 5. BLDC 電機的 “矢量” 或 FOC 控制。
Qorvo的BLDC電機控制解決方案
驅動 BLDC 電機以獲得最佳性能的所有復雜性操作,包括磁場定向控制,現在可以在 Qorvo 的 PAC5xxx 系列電源應用控制器(PACTM) 中實現。該單芯片解決方案包括所有可能需要的控制參數的接口,并提供高達 600V 額定電壓且具有高峰值電流的驅動能力,以滿足電池供電和電網整流供電的要求。
固件可以遠程配置和更新,還包括一個 “自動調試” 模式,可針對特定的電機進行微調操作。
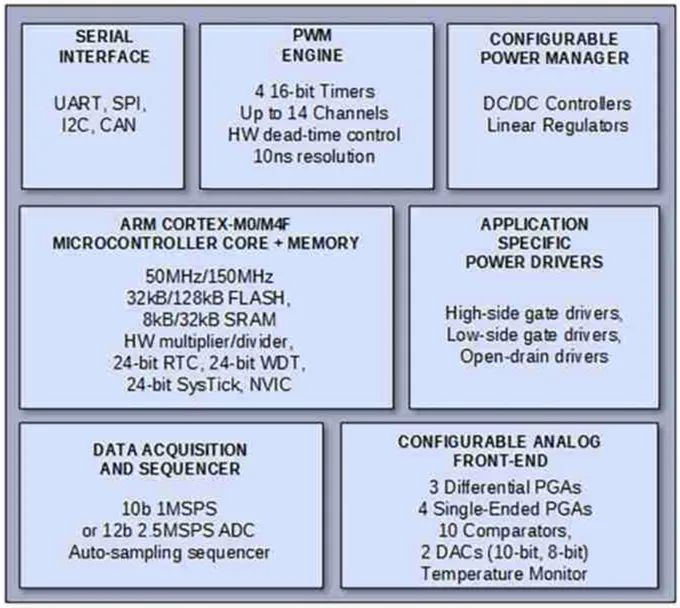
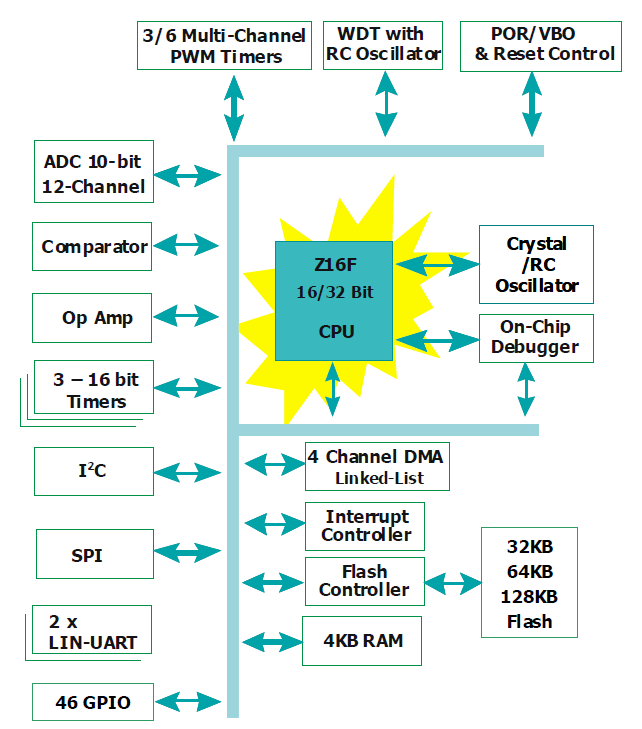
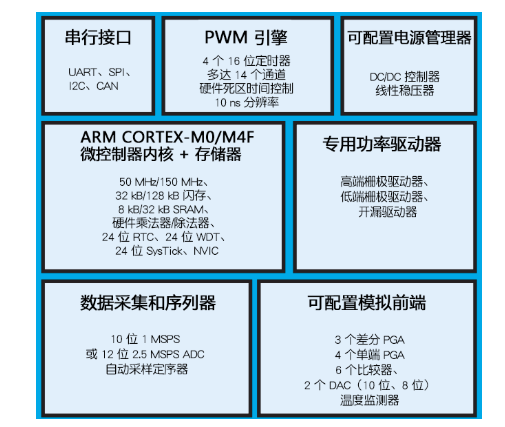
圖 6. Qorvo 的 PACTM 系列 BLDC 控制器
PAC5xxx 系列基于 Arm? Cortex?-M4F 內核,運行頻率為 150Mhz,搭載 32kB SRAM 和 128kB 閃存,配備 12 位 2.5MSPS 模數轉換器 (ADC);或基于 Arm? Cortex?-Mo,運行頻率為 50Mhz,搭載 8kB SRAM 和 32kB 閃存,配備 10 位 1MSPS ADC(圖 6)。
這些方案包括內部開關和線性穩壓器,節省了電路板空間和 BOM 成本。可配置模擬前端 (CAFE)包括單端和差分可編程增益運算放大器、比較器、數模轉換器和 I/O 電路。
具有可互連和可編程的信號采樣、反饋放大以及多個模擬輸入信號的傳感器監測功能。
低功率等級版本型號 PAC5285 還集成了功率 MOSFET,形成一個驅動橋,為手持設備和工具等 BLDC 應用提供了緊湊型解決方案。
所有 PACTM 系列器件都具有全國的保護功能,包括過電流、過電壓、欠電壓和超溫保護。
為了展示這些控制器的功能,Qorvo PAC5223 芯片為無人機電機驅動等應用提供了參考設計,是一個 “微型” FOC 解決方案,尺寸只有 9mm x 15mm,輸出電流的有效值高達 17A,輸入電壓為 4.5V-18V。
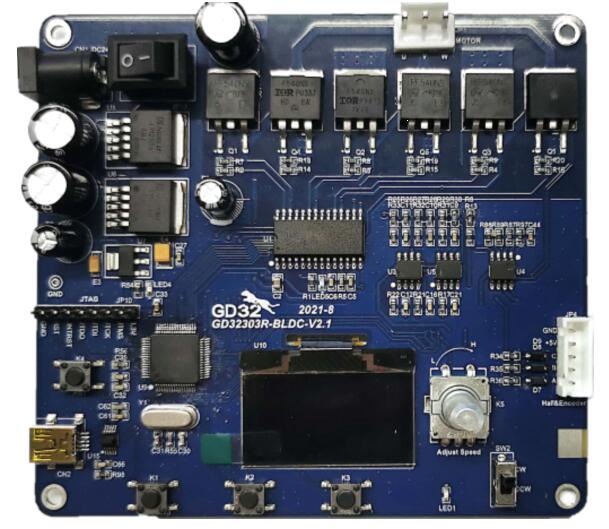
另一個參考設計 RD5223PT 展示了 PAC5223 如何用于電動工具,其 PCB 尺寸為 60mm x 25mm,可以裝配到工具的手柄中。圖 7 支持的峰值電流為 25A RMS/300W。所有參考設計都提供原理圖、布局圖和 BOM。
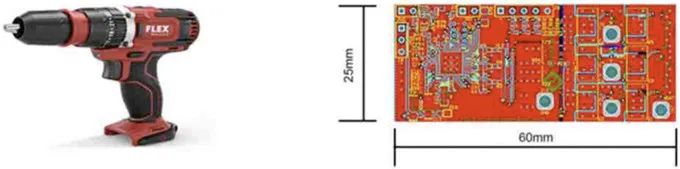
圖 7. 用于電動工具的 Qorvo BLDC 電機驅動參考設計,峰值功率為 300W
Qorvo 的 PAC 系列芯片是硬件生態系統的一部分,還具有完整的數據手冊、參考軟件、可配置圖形界面和用戶指南、應用筆記和軟件開發套件。
結論
在價格敏感的電動工具、小家電和無人機應用中,因為復雜的驅動和傳感系統阻礙 BLDC 電機的應用,而這些電機在尺寸、重量、轉矩和可控性方面具有強大的優勢。
現在,Qorvo 在其 PACTM 器件系列中提供的集成驅動解決方案以低成本,高性能控制器打破了這一障礙,再加上全方位的支特,在終端產品中實施將會更輕松快捷。
編輯:黃飛
?
















 工商網監
工商網監
評論