本篇文章為大家詳解CFL鎮(zhèn)流器IC驅(qū)動LED應(yīng)用電路。
2016-03-10 11:45:10 3217
3217 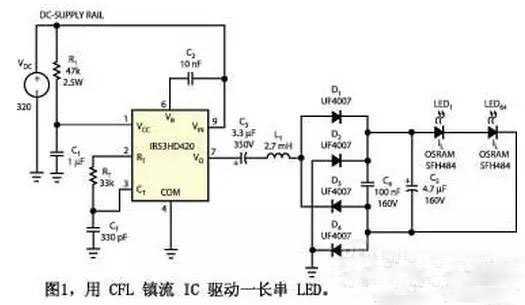
我國車用電機(jī)在全球資源條件下具有明顯的比較優(yōu)勢,發(fā)展?jié)摿^大。從新能源汽車的產(chǎn)業(yè)鏈來看,受益端將主要集中在核心零部件領(lǐng)域。國內(nèi)車用驅(qū)動電機(jī)行業(yè)現(xiàn)狀:電機(jī)業(yè)中的小行業(yè)、但制造門檻高,電機(jī)驅(qū)動系統(tǒng)還存在較多差距與不足,但國內(nèi)政策扶持將加快產(chǎn)業(yè)步伐。
2017-03-23 01:23:07107751 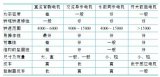
兆易創(chuàng)新 GD32 MCU 在電機(jī)驅(qū)動應(yīng)用上,經(jīng)過多年技術(shù)沉淀,在無刷電機(jī)和步進(jìn)電機(jī)的應(yīng)用中,形成自身完整可靠的解決方案,愿能為用戶提供更多的服務(wù)。
2020-07-03 16:43:476930 步進(jìn)電機(jī)是將電脈沖信號,轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),又稱為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號時,它就可以驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度。
2023-03-01 09:54:494879 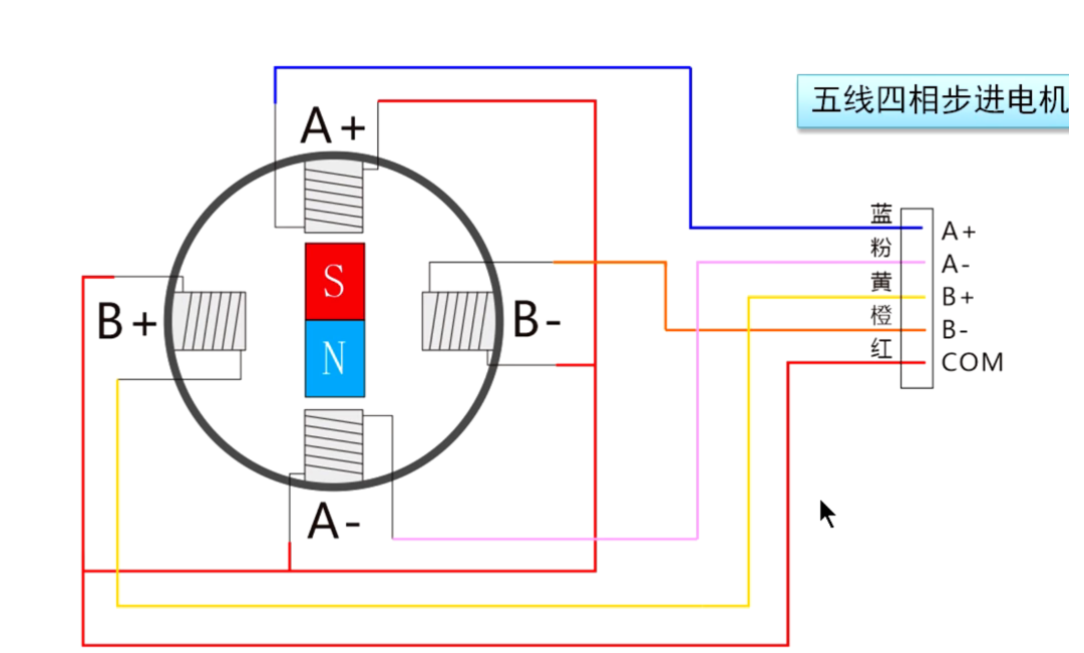
電機(jī)驅(qū)動電路設(shè)計詳解 電機(jī)的控制根據(jù)需求不同,有單向控制轉(zhuǎn)動,也有雙向控制轉(zhuǎn)動,有需要調(diào)節(jié)速度的,也有不需要調(diào)節(jié)速度的。如果需求只是單向轉(zhuǎn)動的電機(jī),那么驅(qū)動只用一個大功率三極管或場效應(yīng)管或繼電器直接
2016-01-27 14:10:15
詳解無刷電機(jī)和有刷電機(jī)的區(qū)別在哪里?
2021-06-26 06:27:27
步進(jìn)電機(jī)詳解概述步進(jìn)電機(jī)的分類、結(jié)構(gòu)、原理單相步進(jìn)電機(jī)2相步進(jìn)電機(jī)概述根據(jù)電壓種類分類,可以分為AC和DC。根據(jù)旋轉(zhuǎn)速度以及電源頻錄之間的關(guān)系可以分為同步電機(jī)和異步電機(jī)。小型電機(jī)中步進(jìn)電機(jī)的位置如下
2021-07-08 06:46:29
。二、步進(jìn)電機(jī)驅(qū)動方式單極性 (unipolar) 和雙極性 (bipolar) 是步進(jìn)電機(jī)最常采用的兩種驅(qū)動架構(gòu)。1.單極性驅(qū)動電路使用四顆晶體管來驅(qū)動步進(jìn)電機(jī)的兩組相位,電機(jī)結(jié)構(gòu)則如圖1...
2021-06-28 08:24:37
有什么方法可以驅(qū)動無刷電機(jī)?有什么方法可以驅(qū)動空心杯電機(jī)?驅(qū)動無刷電機(jī)與驅(qū)動空心杯電機(jī)有何不同?
2021-08-27 06:09:35
/Arduino CNC電機(jī)擴(kuò)展板詳解(A4988驅(qū)動42步進(jìn)電機(jī))概述電機(jī)步進(jìn)模式設(shè)置外接直流電源用于控制電機(jī)的Arduino引腳驅(qū)動1個NEMA步進(jìn)電機(jī)(42步進(jìn)電機(jī))電路連接驅(qū)動1個NEMA步進(jìn)電機(jī)(42步進(jìn)電機(jī))示例程序驅(qū)動3個NEMA步進(jìn)電機(jī)(42步進(jìn)電
2021-06-29 09:17:20
使用的內(nèi)部集成了譯碼器的微特步進(jìn)電機(jī)驅(qū)動器。其設(shè)計為能使雙極步進(jìn)電機(jī)以全、半、1/4、1/8、1/16步進(jìn)模式工作。步進(jìn)模式由邏輯輸入MSx選擇。輸出驅(qū)動能力達(dá)到38V和±2A。HR4988包含一個工作在慢
2019-02-14 06:36:05
L298N是專用驅(qū)動集成電路,屬于H橋集成電路,與L293D的差別是起輸出電流增大,功率增強(qiáng)。其輸出電流為2A,最高電流4A,最高工作電壓50V,可以驅(qū)動感性負(fù)載,如大功率直流電機(jī),步進(jìn)電機(jī),電磁閥
2021-06-29 08:43:18
#《Linux設(shè)備驅(qū)動開發(fā)詳解》電子書連載#第5章 Linux文件系統(tǒng)與設(shè)備文件系統(tǒng),由于字符設(shè)備和塊設(shè)備都很好地體現(xiàn)了“一切都是文件”的設(shè)計思想,掌握Linux文件系統(tǒng)、設(shè)備文件系統(tǒng)的知識非常重要。首先,設(shè)備驅(qū)動最終通過操作系統(tǒng)的文件系統(tǒng)調(diào)用或C庫函數(shù)被訪問
2013-06-06 11:28:02
#《Linux設(shè)備驅(qū)動開發(fā)詳解》電子書連載#第7章 Linux設(shè)備驅(qū)動中的并發(fā)控制,Linux設(shè)備驅(qū)動中必須解決的一個問題是多個進(jìn)程對共享資源的并發(fā)訪問,并發(fā)訪問會導(dǎo)致競態(tài)。Linux提供了多種解決競態(tài)問題的方式,這些方式適合不同的應(yīng)用場景。詳情:http://t.cn/zHONW9I
2013-06-09 14:48:50
#《Linux設(shè)備驅(qū)動開發(fā)詳解》電子書連載#第8章 Linux設(shè)備驅(qū)動中的阻塞與非阻塞IO,阻塞和非阻塞I/O是設(shè)備訪問的兩種不同模式,驅(qū)動程序可以靈活地支持用戶空間對設(shè)備的這兩種訪問方式。8.1節(jié)
2013-06-25 15:14:03
1.《linux驅(qū)動設(shè)備驅(qū)動開發(fā)詳解》 基于linux4.0 是目前主流的 嵌入式開發(fā)用的系統(tǒng) 整個開發(fā)流程很詳細(xì),是嵌入式開發(fā)的入門之選,在2021年之前是沒有任何圖書有這么詳細(xì)的教程的,是國內(nèi)
2021-11-08 08:03:07
《Linux設(shè)備驅(qū)動開發(fā)詳解》
2012-10-30 13:16:24
全橋電機(jī)驅(qū)動電路的工作原理詳解在電路設(shè)計當(dāng)中,全橋的作用非常重要,當(dāng)橋式整流電路當(dāng)中的四個二極管封裝在一起時就構(gòu)成了全橋電路,而全橋電路實際上就是我們常說的H橋電路。本篇文章將主要介紹H橋電機(jī)驅(qū)動
2016-01-28 16:27:18
我國車用電機(jī)在全球資源條件下具有明顯的比較優(yōu)勢,發(fā)展?jié)摿^大。從新能源汽車的產(chǎn)業(yè)鏈來看,受益端將主要集中在核心零部件領(lǐng)域。國內(nèi)車用驅(qū)動電機(jī)行業(yè)現(xiàn)狀:電機(jī)業(yè)中的小行業(yè)、但制造門檻高,電機(jī)驅(qū)動系統(tǒng)還存在
2018-10-16 09:51:55
有刷直流電機(jī)工作原理詳解來源有刷直流電機(jī)被廣泛用于從玩具到按鈕調(diào)節(jié)式汽車坐椅的應(yīng)用中。有刷直流 (Brushed DC,BDC)電機(jī)價格便宜、易于驅(qū)動并且易于制造成各種尺寸和形狀。本應(yīng)用筆記將討論BDC電機(jī)的工作原理、驅(qū)動BDC電機(jī)的方法以及將驅(qū)動電路與PIC唀片機(jī)接口的方法。...
2021-06-30 06:08:51
【單片機(jī)】步進(jìn)電機(jī)控制一、操作目的二、操作內(nèi)容三、預(yù)備知識四、操作接線圖五、程序框圖六、程序清單七、代碼詳解一、操作目的了解步進(jìn)電機(jī)控制的基本原理,掌握步進(jìn)電機(jī)轉(zhuǎn)動編程方法。二、操作內(nèi)容讀取顯示器上
2022-01-10 08:26:47
詳解直流電機(jī)驅(qū)動電路設(shè)計
2021-01-21 07:39:32
詳解直流電機(jī)驅(qū)動電路設(shè)計
2021-01-25 06:44:41
萌新求助,關(guān)于H橋驅(qū)動電機(jī)STM32 PWM互補(bǔ)輸出功能誤用分析求詳解
2021-10-18 08:33:46
輪轂電機(jī)ABZ信號詳解。輪轂電機(jī)的定位使用了霍爾信號和光電增量編碼器,1024線的。也就意味著,輪子轉(zhuǎn)一圈,A信號和B信號各有1024個高電平和低電平。實際應(yīng)用中,我們將A/B信號的上升沿和下降沿
2021-08-30 06:47:50
實時系統(tǒng)VxWorks下設(shè)備驅(qū)動程序的編寫詳解
2009-03-29 12:26:00 15
15 闡述了步進(jìn)電機(jī)的驅(qū)動原理,介紹了恒流斬波、脈寬調(diào)制及細(xì)分驅(qū)動等步進(jìn)電機(jī)驅(qū)動電路的結(jié)構(gòu)設(shè)計方法和設(shè)計中的相關(guān)技術(shù),并給出了實現(xiàn)方案。關(guān)鍵詞:步進(jìn)電機(jī); 恒流斬波; 脈
2010-01-09 13:41:4999 四相步進(jìn)電機(jī)驅(qū)動電路和驅(qū)動程序
步進(jìn)電機(jī)驅(qū)動器系統(tǒng)電路原理圖
2008-10-21 00:42:206696 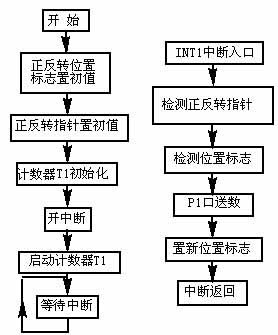
壓電電機(jī)驅(qū)動電路
這個壓電機(jī)
2009-09-26 16:29:25839 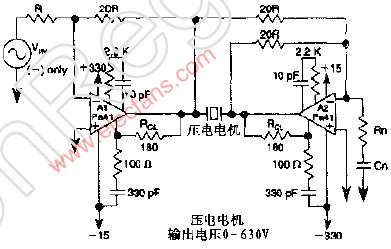
H橋電機(jī)驅(qū)動相關(guān)資料,PWM驅(qū)動直流電機(jī)
2015-12-08 16:58:1741 電機(jī)控制與驅(qū)動電路設(shè)計中模擬信號隔離技巧詳解
2016-01-06 17:28:450 MOS管參數(shù)詳解及驅(qū)動電阻選擇,很好的資料學(xué)習(xí)。快來下載學(xué)習(xí)吧
2016-01-13 14:47:410 電機(jī)驅(qū)動&&舵機(jī)驅(qū)動。
2016-03-21 11:52:3026 A4988電機(jī)驅(qū)動的詳細(xì)資料,電機(jī)驅(qū)動模塊的使用說明。
2016-05-03 11:44:020 電機(jī)驅(qū)動板
2017-02-28 15:24:2035 直流電機(jī)原理應(yīng)用和程序詳解
2017-02-28 15:27:065 電動汽車主要是由電機(jī)驅(qū)動系統(tǒng)、電池系統(tǒng)和整車控制系統(tǒng)三部分構(gòu)成,其中的電機(jī)驅(qū)動系統(tǒng)是直接將電能轉(zhuǎn)換為機(jī)械能的部分,決定了電動汽車的性能指標(biāo)。因此,對于驅(qū)動電機(jī)的選擇就尤為重要。
2017-03-22 15:59:4046631 VxWorks設(shè)備驅(qū)動之字符設(shè)備驅(qū)動詳解
2017-10-26 10:28:567 《Linux設(shè)備驅(qū)動開發(fā)詳解》第23章、Linux設(shè)備驅(qū)動的移植
2017-10-27 10:58:139 《Linux設(shè)備驅(qū)動開發(fā)詳解》第20章、USB主機(jī)與設(shè)備驅(qū)動
2017-10-27 11:04:088 《Linux設(shè)備驅(qū)動開發(fā)詳解》第18章、LCD設(shè)備驅(qū)動
2017-10-27 11:11:5113 《Linux設(shè)備驅(qū)動開發(fā)詳解》第17章、Linux音頻設(shè)備驅(qū)動
2017-10-27 11:14:2617 《Linux設(shè)備驅(qū)動開發(fā)詳解》第16章、Linux網(wǎng)絡(luò)設(shè)備驅(qū)動
2017-10-27 11:17:065 《Linux設(shè)備驅(qū)動開發(fā)詳解》第15章、Linux的I2C核心、總線與設(shè)備驅(qū)動
2017-10-27 11:19:258 《Linux設(shè)備驅(qū)動開發(fā)詳解》第14章、Linux終端設(shè)備驅(qū)動
2017-10-27 11:22:008 《Linux設(shè)備驅(qū)動開發(fā)詳解》第13章、Linux塊設(shè)備驅(qū)動
2017-10-27 11:24:3918 《Linux設(shè)備驅(qū)動開發(fā)詳解》第11章、內(nèi)存與IO訪問
2017-10-27 11:27:156 《Linux設(shè)備驅(qū)動開發(fā)詳解》第9章、Linux設(shè)備驅(qū)動中的異步通知與異步IO
2017-10-27 11:33:150 《Linux設(shè)備驅(qū)動開發(fā)詳解》第8章、Linux設(shè)備驅(qū)動中的阻塞與非阻塞IO
2017-10-27 11:35:129 《Linux設(shè)備驅(qū)動開發(fā)詳解》第7章、Linux設(shè)備驅(qū)動中的并發(fā)控制
2017-10-27 11:37:4510 《Linux設(shè)備驅(qū)動開發(fā)詳解》第6章、字符設(shè)備驅(qū)動
2017-10-27 11:46:4423 《Linux設(shè)備驅(qū)動開發(fā)詳解》第4章、Linux內(nèi)核模塊
2017-10-27 14:15:510 詳解單相電機(jī)電容接線圖
2017-11-30 15:04:203 設(shè)計驅(qū)動器。本文介紹的就是為從一日本產(chǎn)舊式打印機(jī)上拆下的步進(jìn)電機(jī)而設(shè)計的驅(qū)動器。本文先介紹該步進(jìn)電機(jī)的工作原理,然后介紹了其驅(qū)動器的軟、硬件設(shè)計。 1. 步進(jìn)電機(jī)的工作原理 該步進(jìn)電機(jī)為一四相步進(jìn)電機(jī),采用單極性直
2017-12-04 15:08:1847793 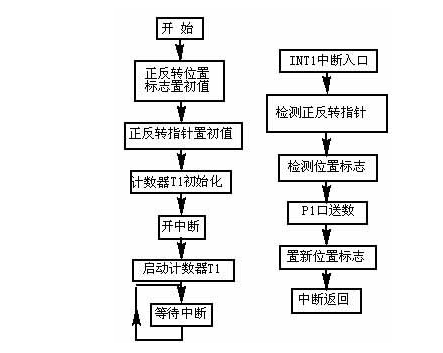
步進(jìn)電機(jī)作為控制用的特種電機(jī),是將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度,它的旋轉(zhuǎn)是以固定的步進(jìn)角度一步一步運(yùn)行的。
2018-03-29 10:49:3118658 
本文介紹了步進(jìn)電機(jī)的控制驅(qū)動原理和東芝的電機(jī)驅(qū)動器,以及電機(jī)驅(qū)動的安全技術(shù)。
2018-07-24 08:48:4122835 家用風(fēng)力發(fā)電機(jī)制作過程詳解
2018-08-21 16:11:1334430 ?? 七特步進(jìn)電機(jī)驅(qū)動器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行
2018-11-21 15:32:401425 本文檔的主要內(nèi)容詳細(xì)介紹的是TMPM370無傳感器BLDC電機(jī)驅(qū)動的控制方法和電路等資料詳解包括了:1.電機(jī)及其原理,2.磁場定向控制(矢量控制),3.TMPM370及其電機(jī)驅(qū)動電路
2019-05-08 08:00:0069 通過電機(jī)驅(qū)動模塊控制驅(qū)動電機(jī)兩端電壓來對電機(jī)進(jìn)行制動,我們可以采用飛思卡爾半導(dǎo)體公司的集成橋式驅(qū)動芯片MC33886。
2019-10-19 09:29:0151982 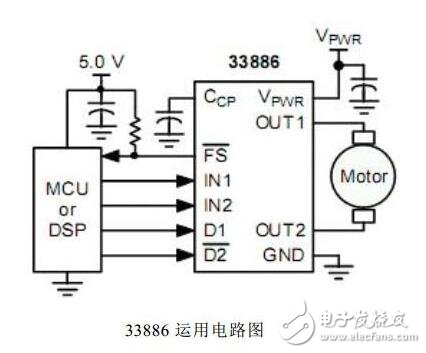
電機(jī):俗稱馬達(dá),依據(jù)電磁感應(yīng)定律實現(xiàn)電能轉(zhuǎn)換或傳遞的一種電磁裝置。包括:電動機(jī)和發(fā)電機(jī)。 電動機(jī)在電路中是用字母M表示,它的主要作用是產(chǎn)生驅(qū)動轉(zhuǎn)矩;作為用電器或各種機(jī)械的動力源,發(fā)電機(jī)在電路中用
2020-10-26 11:11:5930863 
步進(jìn)電機(jī)存在空載啟動頻率,所以步進(jìn)電機(jī)可以低速正常運(yùn)轉(zhuǎn),但若高于一定速度時就無法啟動,并伴有尖銳的嘯叫聲;同時,步進(jìn)電機(jī)是開環(huán)控制,控制精度和速度都沒有伺服電機(jī)那么高。
2020-12-09 16:40:1341367 作為有刷電機(jī)驅(qū)動方法的最后一篇文章,本文將介紹通過有刷電機(jī)“單開關(guān)電路”和“半橋電路”進(jìn)行驅(qū)動的方法。兩種方法均適用直流驅(qū)動和PWM驅(qū)動。
2021-05-02 10:02:006132 
圖文詳解:無刷電機(jī)的繞制和接線方法
2021-05-25 11:48:29117 在當(dāng)今生活中,電機(jī)無處不在。大到飛機(jī)裝甲,小到電動玩具,我們都能在其中發(fā)現(xiàn)電機(jī)的身影。那么,電機(jī)是如何驅(qū)動的呢? 以有刷電機(jī)為例,有刷電機(jī)有兩種驅(qū)動方式 ①利用分立元件的搭建來實現(xiàn),優(yōu)勢是成本低
2021-06-13 18:10:006587 什么是電機(jī)驅(qū)動芯片和電機(jī)驅(qū)動模塊? 電機(jī)驅(qū)動芯片是集成有CMOS 控制電路和DMOS 功率器件的芯片,利用它可以與主處理器、電機(jī)和增量型編碼器構(gòu)成一個完整的運(yùn)動控制系統(tǒng)。可以用來驅(qū)動直流電機(jī)、步進(jìn)
2021-07-18 14:46:4415361 L298N是專用驅(qū)動集成電路,屬于H橋集成電路,與L293D的差別是起輸出電流增大,功率增強(qiáng)。其輸出電流為2A,最高電流4A,最高工作電壓50V,可以驅(qū)動感性負(fù)載,如大功率直流電機(jī),步進(jìn)電機(jī),電磁閥
2021-11-23 17:36:1010 。有小伙伴對于電機(jī)驅(qū)動和編碼器不懂的話請看:電機(jī)驅(qū)動講解:【平衡小車制作】(二)電機(jī)驅(qū)動(超詳解)編碼器講解:【平衡小車制作】(三)編碼器講解(超詳解)??下一篇文章會推出利用PID算法閉環(huán)控制電機(jī)轉(zhuǎn)速(HAL庫)。??話不多說,開始今天的學(xué)習(xí)吧!1、STM32CubeMX配置:1.1 所用工具:芯片:
2022-01-14 12:39:1287 電路首先,單片機(jī)能夠輸出直流信號,但是它的驅(qū)動才能也是有限的,所以單片機(jī)普通做驅(qū)動信號,驅(qū)動大的功率管如MOS管,來產(chǎn)生大電流從而驅(qū)動電機(jī),且占空比大小能夠經(jīng)過驅(qū)動芯片控制加在電機(jī)上的均勻電壓
2022-03-12 08:10:2320121 根據(jù)車輛使用的電機(jī)數(shù)量及其配置,目前電動汽車的驅(qū)動系統(tǒng)被分為單電機(jī)集中驅(qū)動和多電機(jī)分布驅(qū)動兩類。什么是單電機(jī)集中驅(qū)動呢?什么是多電機(jī)分布驅(qū)動呢?
2022-10-26 15:45:133542 Linux設(shè)備驅(qū)動開發(fā)詳解
2022-10-28 11:03:0645 本文將對上一篇文章中提到的在“電機(jī)驅(qū)動”基礎(chǔ)篇中重點(diǎn)介紹的小型馬達(dá)電機(jī)的“有刷直流電機(jī)”、“無刷直流電機(jī)”及“步進(jìn)電機(jī)”的結(jié)構(gòu)概要進(jìn)行說明。
2023-02-23 16:51:451220 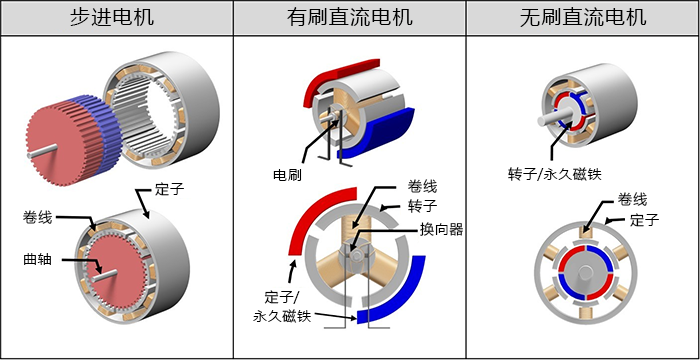
兩相雙極步進(jìn)電機(jī)的驅(qū)動:驅(qū)動電路,先來看兩相雙極驅(qū)動電路的基本框圖示例。可使用雙通道的H橋驅(qū)動電路來驅(qū)動兩相雙極步進(jìn)電機(jī)。
2023-02-24 09:51:111306 
在上一篇文章“兩相雙極步進(jìn)電機(jī)的驅(qū)動 其1”中,給出了兩相雙極步進(jìn)電機(jī)的基本驅(qū)動電路示例和驅(qū)動波形。此次“兩相雙極步進(jìn)電機(jī)的驅(qū)動 其2”篇,將介紹驅(qū)動兩相雙極步進(jìn)電機(jī)過程中電流再生時的Decay:電流衰減。
2023-02-24 09:51:111396 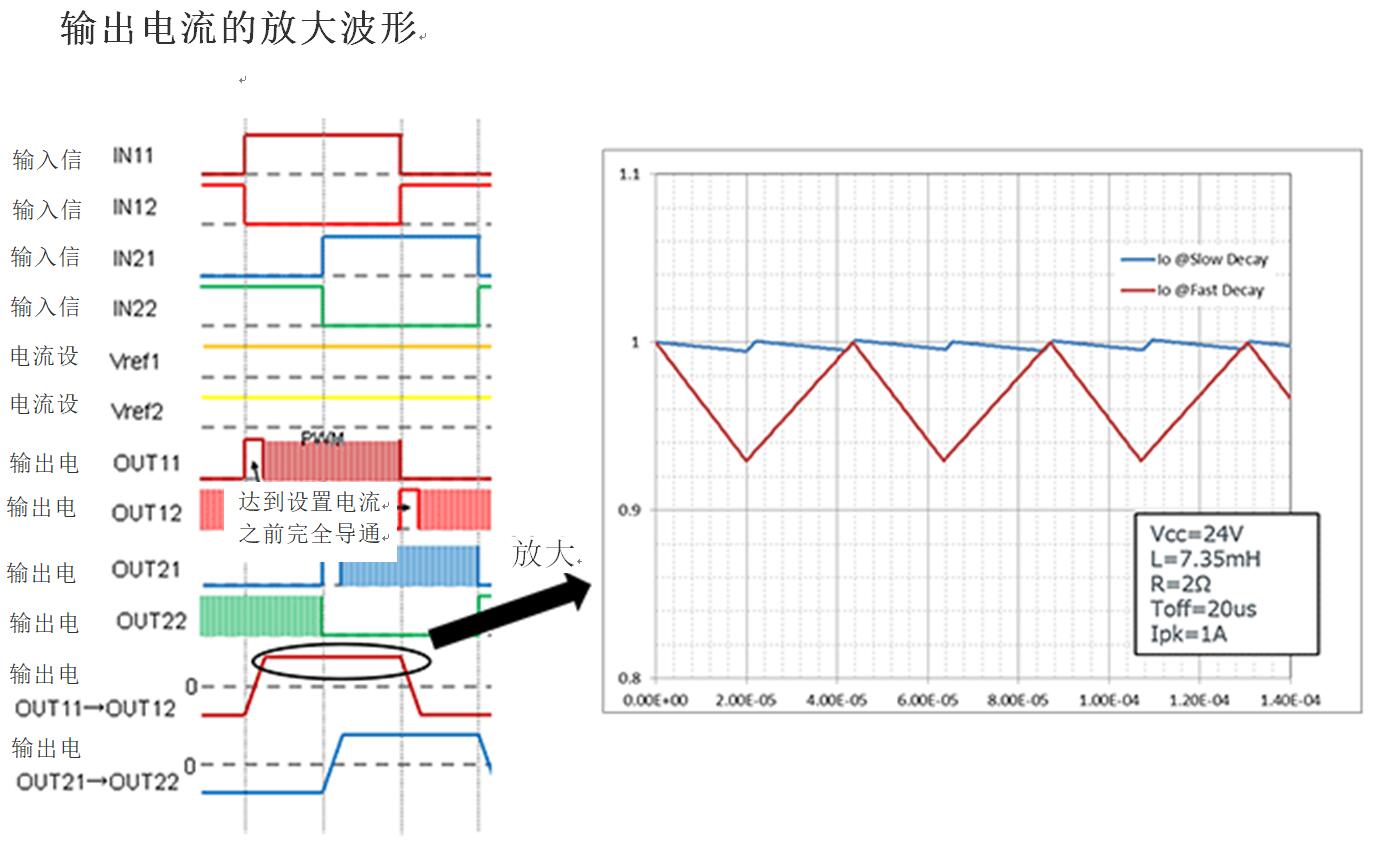
電機(jī)的典型驅(qū)動方法包括電壓驅(qū)動、電流驅(qū)動以及PWM驅(qū)動。本文將介紹采用PWM驅(qū)動方式的恒流工作。首先介紹的是什么是PWM驅(qū)動的電機(jī)恒流工作,其次是PWM驅(qū)動電機(jī)恒流工作時電路的工作原理。
2023-02-24 09:51:121106 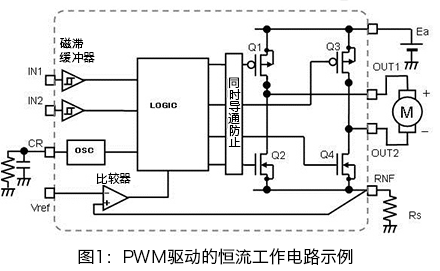
了解工業(yè)直接驅(qū)動伺服電機(jī)技術(shù),有助于在各種應(yīng)用中更好地應(yīng)用伺服電機(jī)。什么是直接驅(qū)動電機(jī)?何時使用直接驅(qū)動電機(jī),可以提供比基于傳動的替代方案更好的性能指標(biāo)?
2023-03-03 18:11:441126 步進(jìn)電機(jī)驅(qū)動器是一種電子設(shè)備,用于控制步進(jìn)電機(jī)的轉(zhuǎn)動和運(yùn)動,其主要原理是將控制信號轉(zhuǎn)換為電機(jī)的驅(qū)動信號。
2023-03-08 14:30:532613 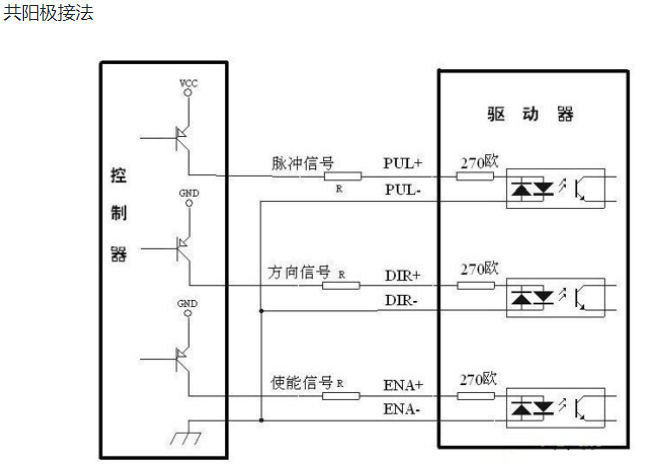
在本文中,我們將解釋方波驅(qū)動和正弦波驅(qū)動這兩種驅(qū)動系統(tǒng)如何影響電機(jī)扭矩性能。
2023-03-09 15:16:291765 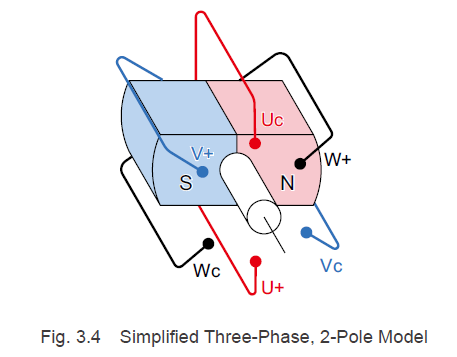
驅(qū)動系統(tǒng)與無刷電機(jī)的特性有著密切的關(guān)系,人們已經(jīng)采用各種方法來改善電機(jī)的可控性和特性。在本文中,我們將解釋兩種典型的驅(qū)動系統(tǒng):方波驅(qū)動和正弦波驅(qū)動。
2023-03-09 15:16:291352 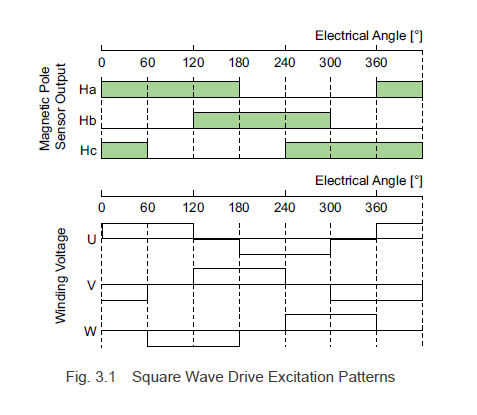
電機(jī)的典型驅(qū)動方法包括電壓驅(qū)動、電流驅(qū)動以及PWM驅(qū)動。本文將介紹采用PWM驅(qū)動方式的恒流工作。首先介紹的是什么是PWM驅(qū)動的電機(jī)恒流工作,其次是PWM驅(qū)動電機(jī)恒流工作時電路的工作原理。
2023-03-13 09:09:131313 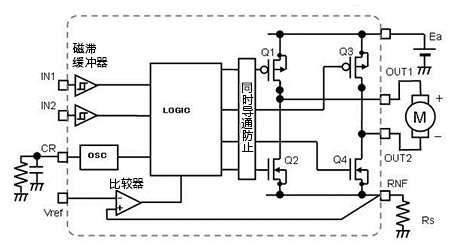
用來使電機(jī)旋轉(zhuǎn)(驅(qū)動電機(jī))的集成電路(IC)通常被稱為“電機(jī)驅(qū)動器IC”或“電機(jī)驅(qū)動IC”,在某些情況下還會被稱為“電機(jī)驅(qū)動器”。市場上的電機(jī)驅(qū)動器IC種類非常多。
2023-03-13 09:17:091341 步進(jìn)電機(jī)相比普通直流電機(jī)來說模型結(jié)構(gòu)方面更加復(fù)雜,比如步進(jìn)電機(jī)沒有設(shè)計直流電機(jī)用于切換電流方向的換向器,這一設(shè)
計致使步進(jìn)電機(jī)轉(zhuǎn)子無法同直流電機(jī)那樣接入直流電源立馬開始運(yùn)動,這需要我們輪流控制步進(jìn)電機(jī)的多個線圈使磁場旋轉(zhuǎn)起
來從而驅(qū)動電機(jī)轉(zhuǎn)子運(yùn)動。所以控制步進(jìn)電機(jī)線圈磁場就是所謂的步進(jìn)電機(jī)驅(qū)動。
2023-03-16 09:28:416 TMC5160 是帶步進(jìn)/方向接口和串行通信接口(SPI) 的高功率步進(jìn)電機(jī)控制驅(qū)動芯片,將實現(xiàn)自動目標(biāo)定位的靈活斜坡發(fā)生器和業(yè)界最先進(jìn)的步進(jìn)電機(jī)驅(qū)動
器結(jié)合在一起。通過外置外部晶體管,實現(xiàn)高動態(tài)
2023-03-16 14:07:1511 文章目錄 1. 基本原理 1.1 控制電機(jī)轉(zhuǎn)速 1.2 控制電機(jī)旋轉(zhuǎn)方向2. H橋驅(qū)動 2.1 `H橋驅(qū)動`名稱的由來 2.2 H橋驅(qū)動控制電機(jī)旋轉(zhuǎn)方向 2.3 H橋驅(qū)動3. 電機(jī)驅(qū)動模塊 3.1
2023-03-16 09:28:441 樹莓派驅(qū)動電機(jī) 設(shè)備: 1.樹莓派3b+2.若干杜邦線3.電機(jī)驅(qū)動模塊tb6612fng4.電機(jī)5.充電寶和usb線6.連接式的DC公母頭(可有可無)7.電烙鐵 使用電機(jī)驅(qū)動模塊原因 樹莓派的引腳
2023-03-17 14:39:341 CNC是計算機(jī)數(shù)字控制(Computerized NumericalControl)的英文縮寫。顧名思義,Arduino CNC電機(jī)擴(kuò)展板常用于驅(qū)動3D打印
機(jī)、機(jī)械臂或機(jī)器人系統(tǒng)中的NEMA17
2023-03-20 13:47:441 本章介紹步進(jìn)電機(jī)的主要驅(qū)動方式和控制方法。步進(jìn)電機(jī)性能除了電機(jī)本體外,還會根據(jù)驅(qū)動方式和控制方法不同而受到很大影響。選擇步進(jìn)電機(jī)的時候,同時要著重考慮驅(qū)動方式和控制方法。
2023-03-20 10:52:305 ]< 一文搞懂步進(jìn)電機(jī)特性、原理及驅(qū)動器設(shè)計_不脫發(fā)的程序猿-CSDN博客>
2.PWM基礎(chǔ)知識 [CSDN]< PWM原理 PWM頻率與占空比詳解Z小旋-CSDN博客pwm>
2023-03-22 09:57:470 ?直流無刷電機(jī) 【自制FOC驅(qū)動器】深入淺出講解FOC算法與SVPWM技術(shù) | 稚暉的個人站 ? ? 寫得很清晰機(jī)器人硬件三大核心部件( 電機(jī) 、 減速器 、 驅(qū)動器 ) 照這樣看來,直流電機(jī)驅(qū)動
2023-05-16 15:13:0222 電機(jī)和驅(qū)動器簡介一般性區(qū)別:有刷電機(jī)一般只需兩根接線端子就可以驅(qū)動,而無刷電機(jī)需要三根接線端子進(jìn)行驅(qū)動。
2023-05-16 14:54:2732 大家好,我是盲僧,最近這段時間在研究BLDC電機(jī),在這里順便總結(jié)和分享一下BLDC的驅(qū)動原理。
2023-08-24 10:49:172354 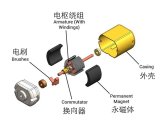
熟悉Trinamic產(chǎn)品的客戶,經(jīng)常會有這樣的問題:–Trinamic的步進(jìn)和伺服芯片性能很好,有沒有其他類型電機(jī)的驅(qū)動芯片?–我們有自己的步進(jìn)驅(qū)動算法,Trinamic集成的算法我們用不上,是否
2023-10-21 08:11:25566 
電動汽車驅(qū)動電機(jī)是指應(yīng)用于電動汽車上,用于驅(qū)動車輪運(yùn)動的電機(jī)。(區(qū)別于伺服電機(jī))
2023-11-06 14:38:54609 
步進(jìn)電機(jī)驅(qū)動器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度,這個固定的角度被稱為“步距角”。步進(jìn)電機(jī)不能直接接到直流或交流電
2023-11-14 08:07:32928 
電子發(fā)燒友網(wǎng)站提供《LED電源驅(qū)動電路圖詳解.doc》資料免費(fèi)下載
2023-11-15 14:25:1010 步進(jìn)電機(jī)驅(qū)動電路原理是指通過特定的電信號驅(qū)動步進(jìn)電機(jī)工作的原理。而步進(jìn)電機(jī)驅(qū)動器是將驅(qū)動電路封裝成一個整體,便于直接使用和連接的設(shè)備。在本文中,我將詳細(xì)介紹步進(jìn)電機(jī)驅(qū)動電路原理。 一、步進(jìn)電機(jī)驅(qū)動
2024-01-24 10:46:14480
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論