在電機的運行中,是由電機定子和轉子磁場同步旋轉,建立的一個具有同步旋轉速度的旋轉坐標系,這個旋轉坐標系就是常說的D-Q旋轉坐標系。在該旋轉坐標系上,所有電信號都可以描述為常數。為了方便電機矢量控制
2017-09-22 10:25:07 4565
4565 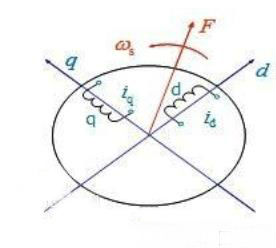
應用矢量控制時其坐標變換是基礎,相關文獻與資料都有很多,matlab還有自帶模塊,但是一般都直接就給個變換矩陣讓人晦澀難懂。
2023-07-10 15:15:041088 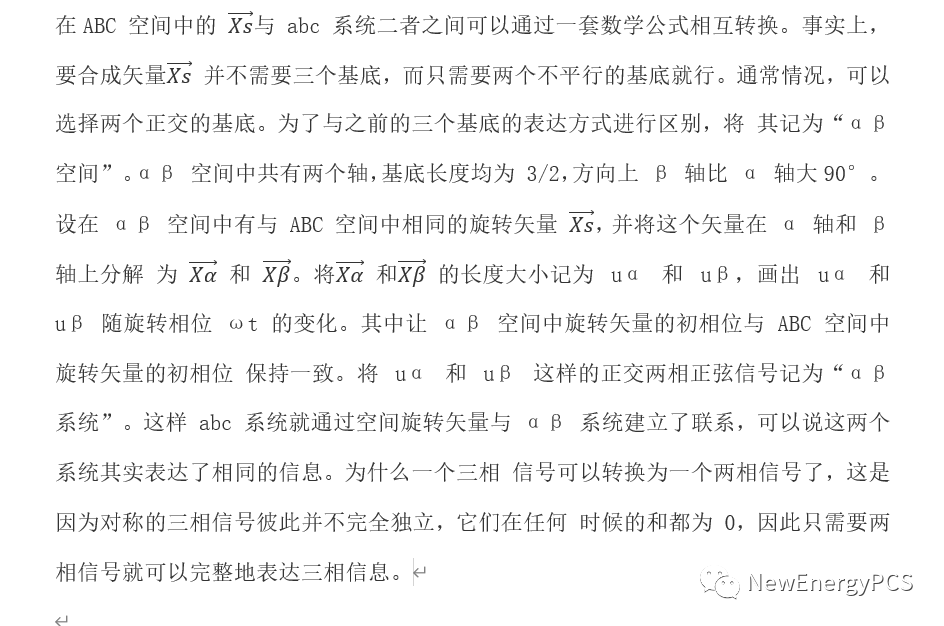
三相永磁同步電機的矢量控制一 內容三相永磁同步電機CPMSM)是一個強搞合、復雜的非線性系統,為了能夠更好地 設計先進的 PMSM 矢量控制算法,建立合適的數學模型就顯得尤為重要。本次學習PMSM
2021-08-27 07:02:16
前言磁場定向控制又稱矢量控制(FOC), 本質上為控制定子電流的幅度和相位,使之產生的磁場和轉子的磁場正交,以產生最大的扭矩.1. PMSM 的磁場定向控制磁場定向控制( Field
2021-09-06 07:45:18
PMSM空間矢量控制中的電流采樣怎么實現軟件去紋波啊?拜托各位大神
2017-11-28 17:50:59
Pmsm在旋轉坐標系的數學模型坐標變換dq軸電壓方程整體模型電壓計算模塊dq軸磁鏈計算d,q軸電流轉距計算轉速計算仿真結果因為轉動慣量較小,轉速迅速跟隨同步轉速順利啟動。A相電流與電壓波形...
2021-08-27 07:56:09
1.坐標變換公式簡單推導一下,現有矩陣udq=C x uabc,idq=C x iabc,其中C代表坐標變換公式。(1)假設功率不變P=udqT x idq=uabcT x iabc=CT x C
2021-08-27 07:42:23
分析PWM整流,逆變裝置時,經常會用到旋轉坐標變換這個分析方法起因是交流側的量都是時變的交流量,不易控制所以書上可以看到對三相坐標變換有如下的描述將三相對稱靜止坐標系(a,b,c)轉換成以電網基波
2017-10-25 14:04:53
一、坐標變換1.1. 三相靜止坐標系(abcabcabc)和兩相靜止坐標系(α/β\alpha/\betaα/β)之間的變換根據圖中所示abcabcabc坐標系和αβ\alpha\betaαβ坐標
2021-08-27 06:18:07
進行傅里葉變換得到的波形圖中,怎么把橫坐標對應的點數變成頻率啊? 求各位大神指導!!!!
2013-07-18 10:15:51
1、簡述矢量變換控制調速原理并畫出異步電動機矢量變換控制系統圖及直接磁場定向矢量變換控制變頻調速系統圖,并對分析兩圖中的輸入與輸出量之間的關系表達式2、簡述直接轉矩控制原理并畫出直接轉矩控制
2021-01-11 17:47:31
在矢量控制中abdq變換的時候,如何把電源角頻率(ωe)換成角度(θ)呢?
2016-01-22 15:16:36
矢量控制又稱磁場導向控制(Field Oriented Control, FOC),這是永磁同步電機(PMSM)的主要控制方法,與BLDC的簡單控制策略相比,矢量控制要更為復雜,故需要一套系統的調試
2021-08-27 07:20:39
矢量控制方式——矢量控制,最簡單的說,就是將交流電機調速通過一系列等效變換,等效成直流電機的調速特性,就這么簡單,至于深入了解,那就得深入了解變頻器的數學模型,電機學等學科。矢量控制原理是模仿
2021-06-28 08:26:48
鼠籠機矢量控制算法中的Clark變換,應該是用等功率變換還是用等幅值變換呢?它們的區別是?對算法的影響是?TI bpra048文檔中的變換是等幅值變化吧,如下圖所示:我的算法是按照這個公式做的;看了下北航出的《電動機的DSP控制》這本書,里面的clark推導是按照等功率做的:
2020-07-17 16:00:42
我們想了解一下Infineon TC399SDK 對于 PMSM電機的調速運動控制是否有軟體庫的支持? 比如是否有相應的lib庫提供pid,park ,clark變換函數的api ?
2024-01-31 07:51:31
PSIM做FOC矢量控制時,dq軸轉換為abc軸的環節,出現了問題。在Vd=8,Vq=0,Θ=2/3π=2.03時,根據坐標變換的公式計算出來的Vaa,Vbb應該是負值,但是仿真出來確實正值。請大神幫忙解答。
2021-09-15 16:55:47
1、SVPWM的生成在FOC矢量控制中,Id、Iq 經過PID輸出Vd、Vq。Vd、Vq經過反park變換成Vα、Vβ。再經過Vα、Vβ合成空間參考矢量Uref。那么怎么根據Vα、Vβ確定Uref
2021-09-06 07:58:01
(PMSM)坐標變換的過程首先將自然坐標系的ABC三相轉化為alpha和beta靜止坐標系,然后再將靜止坐標系轉化為dq旋轉坐標系,第一步成為Clark變換,第二步則成為Park變換,Clark變換一般有兩個
2018-09-16 13:02:18
過電流環PI調節器,給出要運行的d、q值,至于d、q值就是經過park變換后的旋轉坐標系矢量,可能剛開始看FOC的同學先接觸到的就是Clark變換和park變換,但根據流程來看首先用到的其實是反park
2023-11-30 17:47:14
原理…………………………………………………… 2339.2.2 仿真建模與結果分析………………………………………………… 2349.3 基于VSD坐標變換的六相PMSM 矢量控制
2019-12-03 14:59:13
的解耦,利用兩相坐標系,可以解決電機矢量控制問題。圖一:三相靜止坐標系與兩相靜止坐標系轉換在三相靜止坐標系中,為ABC三相電源矢量的矢量和,其在ABC軸上的投影分別為:02park變換推導(兩相靜止坐標
2021-08-16 13:42:11
其實不管是之前的三相異步電動機的控制還是現在比較火的直流無刷或者永磁同步電動機,要想做到精確控制,都離不開兩個家伙,Park變換和Clark變換。也就是我們經常說的矢量變換。通俗的講就是用來做
2023-03-31 14:38:53
??由于前幾天比較忙,這期更新有點遲了!!不過沒關系,在新的章節會保持每周更新1~2篇博文。0 前言這期我們開始新的章節——永磁同步電機矢量控制(三電平)。記得前兩三周我在做三電平的PMSM矢量控制
2021-08-27 07:05:32
無刷直流電機(BLDC)和永磁同步電機(PMSM)的區別在哪?SPWM控制是什么?三相PMSM矢量控制技術包括哪幾部分?
2021-07-27 07:10:16
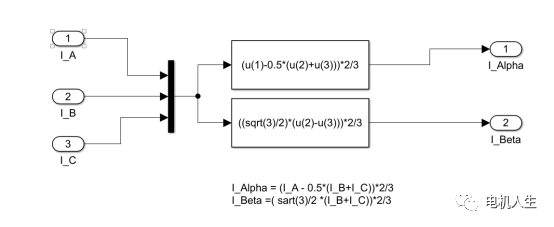
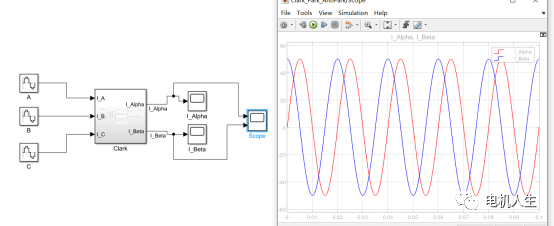
一.內容此次學習主要進行仿真部分的學習。二.知識點1.三相PMSM的坐標變換1.1Clark變換與仿真建模功能:將相位互差的,和轉換成正交的和。Clark變換公式:由三相電流之和為0,也可以將公式
2021-08-27 07:58:30
PMSM 的數學模型,PMSM控制算法中采用的坐標變換通常包括靜止坐標變換( Clark 變換)和同步旋轉坐標變換(
2021-08-27 06:45:51
://url.elecfans.com/u/73ad899cfd1、矢量控制技術的原理矢量控制技術是以坐標變換為基礎,通過對定子電流在dq旋轉坐標系大小和方向進行控制,達到直軸分量和交軸分量的解耦,進而實現對磁場和轉矩的解耦控制
2018-09-19 19:19:33
什么是矢量控制時序?
2022-02-11 06:38:40
目前傳統的矢量控制常見的方法有 id=0 控制和最大轉矩電流比控制,前者主要適用于標貼式三相PMSM,后者主要用于內嵌式PMSM。但這里說明一下,對于表貼式PMSM,Id=0控制和最大轉矩電流比控制
2021-08-27 07:07:21
今天看了一篇關于PMSM矢量控制的論文,是在電流環中引入了前饋補償,覺得挺有用的,分享一下:首先是pmsm在dq坐標系下的數學模型:將式(2)代入式(1)得到定子電壓方程u可見Ud不僅與id有關,也與iq有關,dq軸定子電壓之間存在耦合,該耦合從根本上是由于磁場的相互耦合引起的。...
2021-08-27 06:35:47
基于TMS320F28335的電機控制Clark變換的實現在電機控制中,經常用到clark變換,它的基本思想是把三相靜止、互差120°的abc坐標系中的變量變化到兩相靜止、互差90°的αβ坐標系中,從而簡化了控制過程。其基本變換的原理為如圖1所示:
2013-01-07 13:37:34
PMSM無傳感器矢量控制原理PSoC4簡介基于PSoC4的無傳感器矢量控制方案基于PSoC4的設計實例
2021-02-24 06:12:44
中將三角波與調制波的比較順序弄反了,三角波大于調制波輸出1,小于輸出0;給定1500rpm的轉速波形:接下來做的事:1.轉子磁場定向的矢量控制方法解決了永磁同步電機控制中勵磁與轉矩電流之...
2021-06-30 06:39:11
在電機仿真過程中,需要采用坐標變換理論把交流電機通過坐標變換理論等效為直流電機進行解耦控制,Park(abctodq0/dq0toabc)變換和Clark(abctoαβ/αβtoabc
2021-09-03 06:24:55
上一階我們講了異步電機的四大方程,發現異步電機模型非常復雜,中間各個變量相互耦合,我們希望通過更直接,更簡單的方法來分析,這里將引出坐標變換的概念。首先要提出等效的前提,其實就是強調能量守恒:?磁勢
2021-09-03 09:19:51
變換32.1坐標變換的基本思路32.2三相—兩相變換(3/2變換)42.3靜止兩相-旋轉正交變換(2s/2r)53轉子磁鏈計算64矢量控制系統設計74.1按轉子磁鏈定向...
2021-09-03 07:06:48
變換32.1坐標變換的基本思路32.2三相—兩相變換(3/2變換)42.3靜止兩相-旋轉正交變換(2s/2r)53轉子磁鏈計算64矢量控制系統設計74.1按轉子磁鏈定向...
2021-09-06 06:29:37
,需要進行調整。三、測試變換程序的正確性。矢量控制的核心其實就在Clark與Park變換上,通過這兩個變換實現了直軸與交軸的解耦。如果使用的是官方的庫,可以不管本步驟。如果是自己寫的,需要通過仿真測試
2019-10-15 14:23:52
【實例簡介】永磁同步電機矢量控制matlab仿真 各個環節的源碼包括 dq變換 svpwm等【實例截圖】【核心代碼】│ abc_to_alpha_beta.m│ abc_to_dq.m
2021-08-31 06:14:18
逆變換如下:由于矢量控制能為永磁同步電機帶來像直流電機一樣的調速性能,而矢量控制又是建立在坐標變換理論下的體系,因此我們有必要討論一下永磁同步電機在 d,q坐標系下的數學模型。其電路方程如下:轉矩方程
2014-01-22 09:46:51
永磁同步電機控制系統是多變量、強耦合的時變非線性系統,要進行高性能控制,獲得良好的動態穩態特性,常用的方法是矢量控制。永磁同步電機矢量控制是通過坐標變換的方式將三相電流解耦,以控制其中一項來達到控制
2021-08-27 06:04:51
永磁同步電機的矢量控制原理是什么?永磁同步電機的矢量控制進行坐標變換的原因是什么?
2021-10-14 06:21:27
2.永磁同步電機的矢量控制策略(二)對于正弦波永磁同步電機,所有的矢量控制算法都是建立在電機的數學模型上。因此,有必要結合坐標變換對永磁同步電機的數學模型進行推導,分別為三種不同坐標系下的數學模型
2021-08-27 06:04:18
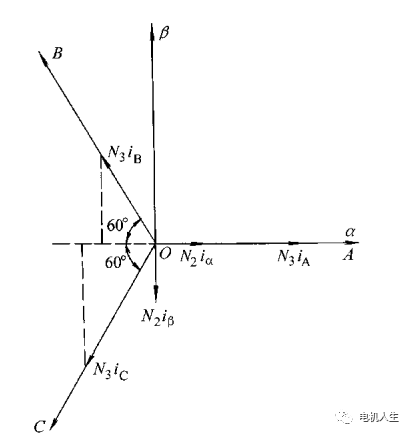
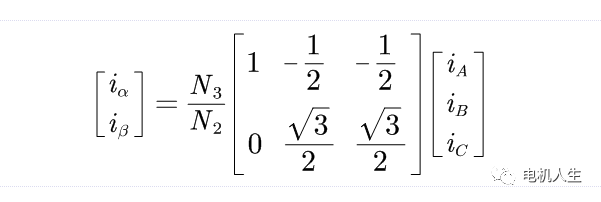
1.CLARK(3/2)變換ABC為三相坐標系, α β為兩相正交坐標系。設三相繞組每相有效匝數為N3,兩相繞組每相有效匝數為N2,各相磁動勢為有效匝數與電流的乘積,其空間矢量位于相關坐標系上。按照
2021-09-06 06:38:53
和穩定性。AC電機的矢量控制:矢量控制算法的核心是兩個重要的轉換: Clark轉換,Park轉換和它們的逆運算。采用Clark和Park轉換,帶來可以控制到轉子區域的轉子電流。這種做充許一個轉子控制
2018-10-26 11:43:01
角度θ的轉換。六、AC 電機的磁場定向矢量控制的基本結構Clarke 變換采用三相電流 IA,IB 以及 IC,這兩個在固定座標定子。相中的電流被變換成 Isd 和 Isq,成為 Park 變換 d
2020-12-30 07:00:00
在電機的運行中,是由電機定子和轉子磁場同步旋轉,建立的一個具有同步旋轉速度的旋轉坐標系,這個旋轉坐標系就是常說的D-Q旋轉坐標系。在該旋轉坐標系上,所有電信號都可以描述為常數。為了方便電機矢量控制
2018-10-11 11:14:52
在電機的運行中,是由電機定子和轉子磁場同步旋轉,建立的一個具有同步旋轉速度的旋轉坐標系,這個旋轉坐標系就是常說的D-Q旋轉坐標系。在該旋轉坐標系上,所有電信號都可以描述為常數。為了方便電機矢量控制
2023-03-06 17:45:31
參考信號的跟蹤效果較好,因此三相交流電會經過坐標變換,在旋轉的dq坐標軸上,可以用直流量描述電樞繞組的合成矢量。FOC控制中,有兩種坐標轉換需要注意的,分別是clark變換,和park變換。clark變換將
2019-10-29 10:27:06
相信在搞電機控制的小伙伴應該知道目前對永磁同步電機(PMSM)的控制技術主要有磁場定向矢量控制(FOC)和直接轉矩控制技術(DTC)。今天主要是想說一說磁場定向矢量控制(FOC)磁場定向矢量控制
2021-08-27 07:38:34
專家,您好:有個事情不懂,想請教您一下。在TI公司提供的2812矢量控制例程pmsm3_1中,為什么CLARKE變換,需要_IQ15toIQ轉換呢,多謝!
2018-08-31 09:35:40
本文應用Matlab 下的仿真工具SIMULINK 進行異步電動機矢量控制的仿真研究,通過對異步電動機矢量控制方程式的變換構造出電動機的仿真模型,并通過對異步電動機的電壓方程的變
2009-08-12 12:18:52 54
54 矩陣變換器-永磁同步電機矢量控制系統的新型電流控制方法:分析了基于電流滯環控制的矩陣變換器-永磁同步電機(MC-PMSM)系統的開關組合狀態和存在的缺點:系統側電流存在較
2009-11-18 10:44:3331 matlab坐標變換
坐標變換
cart2pol 笛卡兒坐標變換為極坐標或圓柱坐標 cart2sph 笛卡兒坐標變換為球坐標
2008-06-18 14:47:502210 在 1971 年德國學者提出的矢量變換控制方法中,正交旋轉坐標系的直軸為勵磁軸(M)與轉子磁場重合,交軸為轉矩軸(T),轉子磁場的交軸分量為零,電磁轉矩的方程得到簡化,即在
2011-05-25 15:22:030 鑒于直接轉子磁場定向矢量控制系統較為復雜、磁鏈反饋信號不易獲取等缺點,而轉差頻率矢量控制方法是按轉子磁鏈定向的間接矢量控制系統,不需要進行磁通檢測和坐標變換,并具
2011-09-06 21:41:545359 
Park_Clark_變換公式及鎖相的推導,需要的自己下載呀!做信號處理!
2015-11-06 17:13:550 基于SVPWM的PMSM矢量控制伺服系統研究。
2016-04-18 10:02:1723 交流直線電機矢量變換控制軟換向方法及實現
2016-03-30 18:24:1410 dq坐標變換數學原理
2016-12-20 22:56:4819 淺談變頻器矢量變換控制的基本原理及應用
2017-01-21 11:54:398 基于模糊PID的PMSM矢量控制系統研究_張濤
2017-03-16 08:00:001 坐標變換和矩陣變換的原理放在交流電機里頭介紹比較容易理解,所以下面介紹的坐標變換和變換矩陣都以交流電機模型來說明。
2017-09-05 10:49:26329 在電機的運行中,是由電機定子和轉子磁場同步旋轉,建立的一個具有同步旋轉速度的旋轉坐標系,這個旋轉坐標系就是常說的D-Q旋轉坐標系。在該旋轉坐標系上,所有電信號都可以描述為常數。為了方便電機矢量控制
2017-11-08 11:15:021 在不倫瑞克工業大學(TU Braunschweig)發表的博士論文中提出三相電機磁場定向控制方法,通過異步電機矢量控制理論來解決交流電機轉矩控制問題。矢量控制實現的基本原理是通過測量和控制異步電動機
2017-11-23 19:00:4518767 
基于Matlab-Simulink的永磁同步電機(PMSM)矢量控制仿真
2018-05-05 10:18:4831 輸出功率不變; 2、變換前后電流所合成的空間矢量等效且電機輸出功率不變。 這兩種最后方式是造成系數不同的根本原因,實際應用中可以根據需要選擇相應的變換等效原則。
2023-01-19 15:52:001400 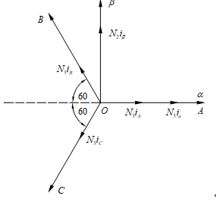
AN6303 PMSM矢量控制原理(中文版)
2023-02-27 18:39:470 AN6413 基于MM32SPIN0280的PMSM雙電阻采樣矢量控制方案(中文版)
2023-03-01 18:44:310 AN6415_基于MM32SPIN0280的PMSM單電阻采樣矢量控制方案(中文版)
2023-03-01 18:45:010 ????????以無刷直流電機為例,在矢量控制中,因為需要從轉子角度對電機進行控制,所以需要對定子三相電流進行坐標變換,在旋轉坐標系下對轉矩和磁場進行解耦控制。控制輸出需經過坐標反變換,在靜止坐標
2023-03-08 14:51:510 三相永磁同步電機的矢量控制學習筆記1 一 內容 三相永磁同步電機CPMSM)是一個強搞合、復雜的非線性系統,為了能夠更好地 設計先進的 PMSM 矢量控制算法,建立合適的數學模型就顯得尤為重要。本次
2023-03-13 10:26:270 文章目錄 1、abc坐標系 2、αβ坐標系 2.1、Clark變換 2.2、αβ坐標系電流圖解 3.dq坐標系 3.1、park變換 3.2、dq坐標系電流圖解 1、abc坐標系 向永磁同步電機
2023-03-13 09:45:200 對于正弦波永磁同步電機,所有的矢量控制算法都是建立在電機的數學模型上。因此,有必要結合坐標變換對永磁同步電機的數學模型進行推導,分別為三種不同坐標系下的數學模型。即:自然坐標系
ABC下的PMSM
2023-03-13 11:08:140 目前傳統的矢量控制常見的方法有 id=0 控制和最大轉矩電流比控制,前者主要適用于標貼式三相PMSM,后者主要用于內嵌式PMSM。但這里說明一下,對于表貼式PMSM,Id=0控制和最大轉矩電流比控制
2023-03-13 10:46:362 學了一年多的PMSM了,用最快的方法在simulink里搭建一個基礎的矢量控制模型,不熟悉的話可以參考下,有空更新每個步驟細節和其他實現方法,創作不宜,記得點贊收藏。
2023-03-14 09:33:050 永磁同步電機負載狀態估計(龍伯格觀測器離散連續各種卡爾曼濾波器)矢量控制坐標變換,英文論文復現含中文報告可作為結課作業。 ?simulink仿真如下: 永磁同步電機與矢量控制部分: ?龍伯格觀測器
2023-03-14 09:33:084 為了簡化自然坐標系下三相 PMSM 的數學模型,PMSM控制算法中采用的坐標變換通常包括靜止坐標變換( Clark 變換)
和同步旋轉坐標變換( Park變換) 。各坐標系如下圖所示,其中,ABC
2023-03-15 10:47:371 PMSM本體。 2.SVPWM(矢量脈寬調制技術)的搭建 上圖為封裝好的SVPWM模型。這里面有兩個輸入參數,分別為電壓Ud和調制時間Ts。 3.park變換和克拉克clark變換上圖為park變換。
2023-03-15 10:37:070
制一點點的進行講解。我們知道,標準的FOC(矢量控制)是由電流環、轉速環和PWM控制算法組成的。而它們得以實現的基礎正是坐標變換。
2023-03-15 10:14:432 目錄在位置跟蹤伺服系統中二相混合式步進電機閉環矢量控制simulink仿真 閉環矢量控制系統simulink圖? 閉環矢量控制系統系統結構框圖 二相混合式步進電機的數學模型 矩角特性 電壓方程
2023-03-24 10:30:591 前言:在前面梳理完電機數學模型和坐標變換的知識后,下一步就是對矢量控制系統的建立,矢量控制系統重在于其思想框
架的理解以及異步電機獨有多種磁場定向方案之間的區別,這兩個問題都是值得獨立探究的,按照順序來。
2023-03-27 11:16:084 矢量控制是一種高級的電機控制方法,它的基本原理是通過對電機的磁場進行控制,來實現對電機的轉矩、轉速和位置的控制。矢量控制技術將三相電機的電流、電壓和頻率進行坐標變換,將其轉換為直角坐標系下的兩個分量x和y的形式,然后可以分別對這兩個分量進行控制,從而精確地控制電機的磁場和電流。
2023-03-28 15:44:093673 , Space Vector Pulse Width Modulation)合成參考電壓矢量。矢量控制在國際上一般被稱為磁場定向控制技術, 即用電機自身磁場矢量的方向作為坐標軸的基準方向和坐標變換的方向來控制電動機電流的大小、方向的控制方法。
FOC 能取得較好的動靜態性能,在中小功率場合得到了廣泛的應用,
2023-03-29 11:45:290 至于什么時異步電機矢量控制系統,這里就不贅述了。可以參考陳伯時教授的《運動控制系統》,講的很詳細。涉及到許多概念,包括何為坐標變換,以及dq坐標系下異步電機方程,間接矢量控
制之類。這些都是最最
2023-03-29 10:21:492 相信對于很多做永磁同步電機控制或者想要了解永磁同步電機控制的朋友來說Clark變換是必須要理解的一個重要環節,之前查閱了很多的網上分享的文章,但是一直沒有比較深刻的理解其過程,今天小編就結合一些牛人
2023-05-06 14:16:290 FOC控制的本質其實就是解耦。借助電角度,把三相側電流變換到旋轉兩相側(也就是clark,park變換),然后在旋轉兩相側實現轉矩和磁鏈的單獨控制。以上的分析都是依托于MATLAB/simulink
2023-05-29 16:59:47723 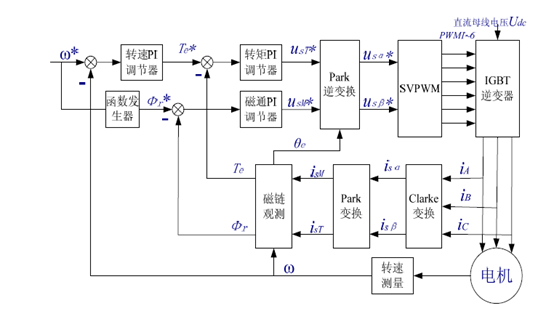
FOC控制的本質其實就是解耦。借助電角度,把三相側電流變換到旋轉兩相側(也就是clark,park變換),然后在旋轉兩相側實現轉矩和磁鏈的單獨控制。以上的分析都是依托于MATLAB/simulink
2023-05-29 17:00:031164 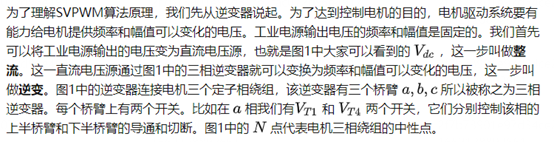
矢量控制是通過矢量坐標電路控制電動機定子電流的大小和相位,以達到對電動機在d、q、0坐標軸系中的勵磁電流和轉矩電流分別進行控制,進而達到控制電動機轉矩的目的。通過控制各矢量的作用順序和時間以及零矢量
2023-07-04 17:03:361475 導讀:異步電機直接矢量控制需要通過磁鏈觀測器來獲取同步角,用于控制過程中的坐標變換。
2023-11-09 11:24:10465 
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論