 電子發燒友App
電子發燒友App


基本概念
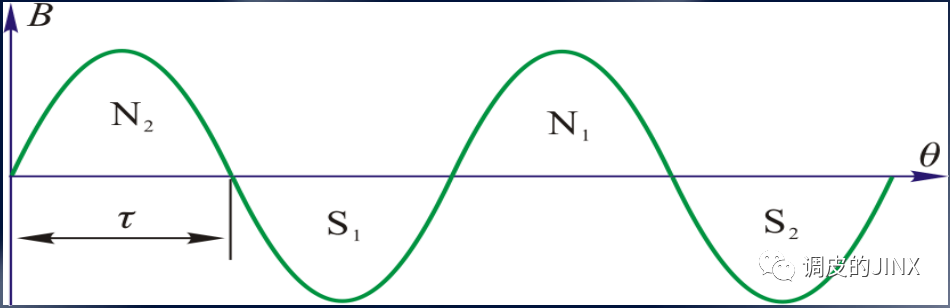
**1. ** 極對數P :是指永磁轉子(或定子)有多少對N-S極。
每旋轉一周,感應電動勢產生了P個正弦波,若電機轉速為N rpm,則每秒產生了NP/60個正弦波,即感應電動勢頻率f=NP/60。
下圖中,定子極對數為2,轉子極對數為4。在實際應用過程中,定子極對數需要與轉子極對數保持一致,才能保證電機平穩的運轉。圖中,定轉子極對數不一致,電機會發生什么情況呢? 答案是:電磁轉矩為0 。
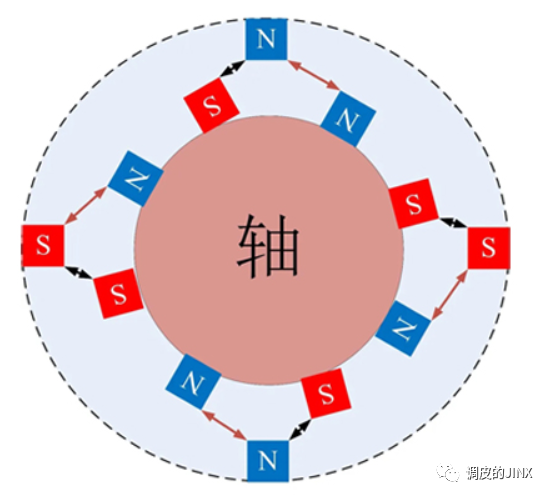
已知電機持續穩定的旋轉必要條件是:定轉子極對數相等+定轉子磁場相對靜止。
驗證:定轉子極對數不相等時,電磁扭矩為0。
如果定轉子極對數不相等的電機在某個特定相對位置時轉矩不為0,那么我們就可以保持這樣一個相對位置,使定轉子磁場相對靜止,并以同樣的轉速同時旋轉。這樣一來,電機就會始終保持這個不為0的電磁轉矩旋轉,從而實現電機持續穩定的旋轉。這與已知矛盾,故定轉子極對數不相等時,電磁扭矩為0。
2. 極距 :沿電樞表面相鄰兩磁極之間的距離稱為極距。極距一般都用槽數表示,為Z/2P,Z為定子槽數。
3. 節距 :電機繞組每個線圈兩邊之間所跨的鐵心槽數叫做節距,也稱跨距。當節距等于極距為 全距繞組 ;節距小于極距時則稱 短距繞組 ;而當節距大于極距時則稱 長距繞組 。由于短距繞組具有端部較短電磁線用料省和功率因數較高等許多優點,因而在應用較多的雙層疊繞組中無一例外的都采用短距繞組。
為使電機的出力最大,節距通常選擇為與極距比較接近的整數。
一般來說,節距等于1的繞組被稱為集中繞組。
權衡因數
俗話說,世上無絕對。任何一種設計方案都有其優劣點,最終的選擇是權衡各方面因素,做出一個適合自己的方案。
極槽配合的選擇主要需要權衡的因數有: 齒槽轉矩 、 轉矩脈動 、 感應電動勢 、 諧波 、 主要性能參數。
齒槽轉矩
永磁電機在運行過程中產生的轉矩主要包含三種分量,分別是:永磁磁場與定子電流的交軸分量相互作用而產生的 主電磁轉矩 、電機凸極效應產生的 磁阻轉矩 (當電機交、直軸的磁導相同時不產生磁阻轉矩)和永磁體磁通與所對應定子齒槽相互作用而產生的 齒槽轉矩 。

其中,主電磁轉矩和磁阻轉矩主要因電磁因素而產生,統稱為電磁轉矩。然而, 齒槽轉矩是永磁電機特有的問題之一 ,齒槽轉矩是永磁電機繞組不通電時永磁體和定子鐵心之間相互作用產生的轉矩,是由永磁體與電樞齒之間相互作用力的切向分量****引起的。

當電機運行時,永磁體兩端所對應的齒槽區域內的磁導變化大,導致磁場儲能變化,進而產生齒槽轉矩。
齒槽轉矩僅由電機結構參數所引起的,可以通過電機結構參數的優化對其進行削弱 。
國標GBT/30549-2014里對齒槽轉矩的測試明確的定義:電機繞組開路時,電機回轉一周內,由電樞鐵心開槽,有趨于最小磁阻位置的傾向而產生的周期性力矩。
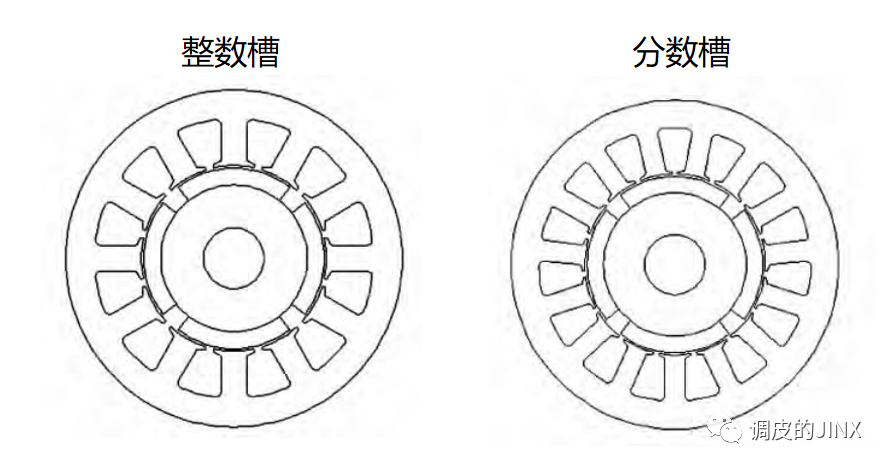
對于槽數Z,極對數P,m相的電機,每極每相分配的槽數q=Z/(2Pm)。
若q為整數,如8級48槽,q=2,為整數槽
若q為分數,如8級56槽,q=7/3,為分數槽
以電機的定子槽數 Z 和極數 2p 的最大公約數作為電機齒槽轉矩的評價因子 CT,一般來說, 評價因子越小,齒槽轉矩的峰值就越低 ,即電機的齒槽轉矩就越小。這是電機槽極配合與電機齒槽轉矩的主要內在關系。CT 與電機槽極的關系式如下:
** CT = GCD( Z,2p)**
不論電機是整數槽還是分數槽,上述公式都是適用的。即使評價因子 CT 為同一等級,電機的齒槽轉矩也有差別,但相差會小于其他等級的評價因子的齒槽轉矩。
由于分數槽電機的永磁體相對定子位置都不一樣,導致產生的齒槽轉矩相位各不相同,同一時刻有大有小。總的齒槽轉矩就不像整數槽一樣簡單的疊加,而是有一部分相互抵消。 因此,在其他條件一樣的情況下,分數槽的齒槽轉矩會比整數槽低。
除了CT這個評價指標以外,還可以以電機的槽數與槽極數的最小公倍數之比 KL 作為判斷電機齒槽轉矩的依據。KL 稱為電機齒槽轉矩的計算因子,一般來說你, KL 越小,則電機齒槽轉矩就越小 。
KL = Z/LCM(Z,2p)
需要注意的是,齒槽轉矩呈周期性的變化,這里的LCM(Z,2p)是齒槽轉矩基波頻率。通常認為,基波齒槽轉矩的頻率越大,則轉子每轉中基波齒槽轉矩的脈動次數就越多,其幅值就越小。
轉矩脈動
電機轉矩脈動波形是一條振蕩曲線。下圖是電機的瞬態轉矩曲線,電機轉矩不是一條直線,電機起始時波動很大,經過一段時間后轉矩波動逐漸穩定在一個較窄的區域內,但是還是有波動。
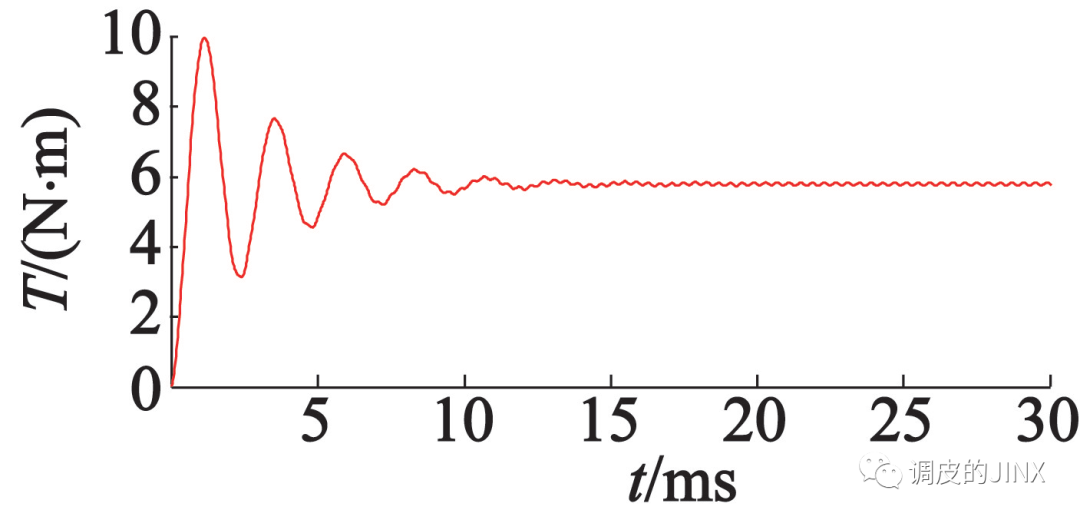
將上圖截取10ms區間放大如下圖,即我們常說的轉矩脈動。
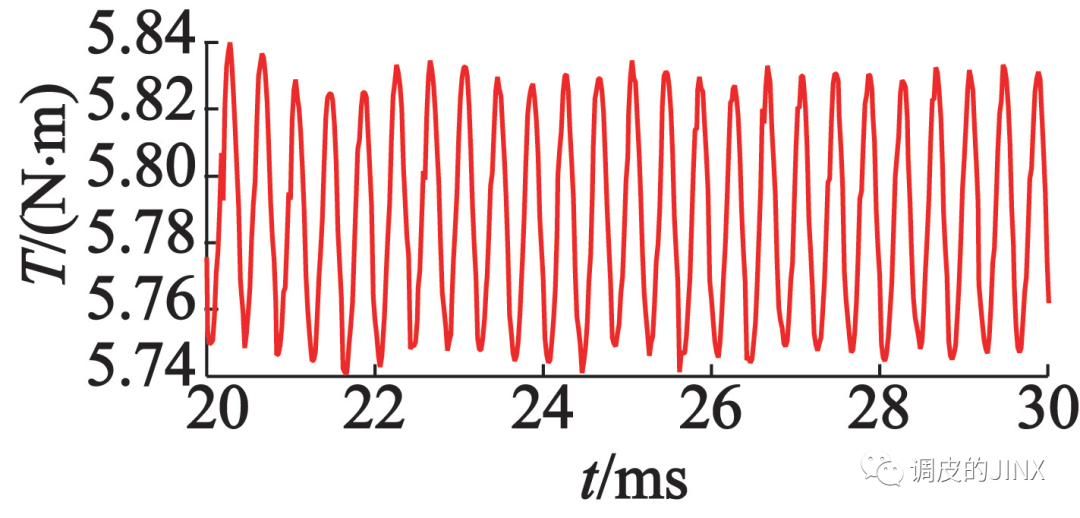
由前文的公式,可得轉矩波動的成因主要有以下幾點: 齒槽轉矩 /感應電動勢****諧波含量 / 磁路飽和 /諧波電流等。

其中,齒槽轉矩對應于式等號右邊的第三項;感應電動勢對應于前兩項中的 ePMn 與 ein;諧波電流則對應于這兩項中的 in。飽和的作用機理比較復雜,與表達式中的每一項都有關。對于電機設計來說,主要考慮前面三個因素的影響。
下圖是為不同槽極配合時的轉矩脈動波形(其他關鍵參數一致:極狐系數、額定參數、磁密等)。
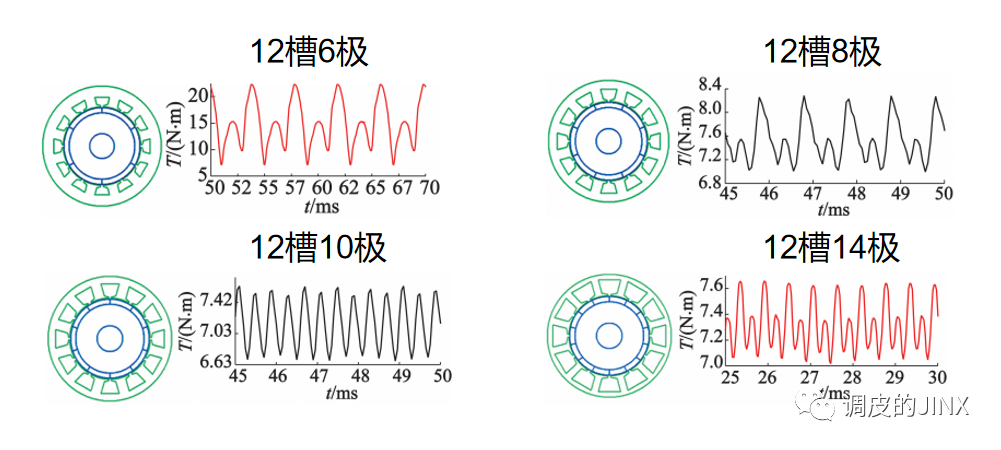
在固定的時間段內,電機轉矩脈沖數與電機轉速、轉子極數成正比 。
齒槽轉矩不等于轉矩脈動 。齒槽轉矩只是在有槽定子電機中產生,而且齒槽轉矩與電機通電與否無關。
電機的轉矩脈動是電機通電運行達到穩態時,轉矩尚有不平穩的波動,電機齒槽轉矩已經消除為零,但是電機的轉矩脈動可能依然仍在,有的甚至很大。
齒槽轉矩不會影響電機的額定性能,齒槽轉矩大的電機,某些參數要比齒槽轉矩小的電機好。有的電機齒槽轉矩較大,但是其運行時還比較平穩。而轉矩脈動會影響電機的運行平穩性,會產生噪聲,甚至會引起電機的振動和共振。 電機設計時 應綜合考慮電機的齒槽轉矩和電機的轉矩脈動,使電機既有好的手感,又能運行平穩 。
感應電動勢
電機的感應電動勢受電機極槽配合影響較大。如前文描述,每旋轉一周,感應電動勢產生了P個正弦波,若電機轉速為N rpm,則每秒產生了NP/60個正弦波,即感應電動勢頻率f=NP/60。
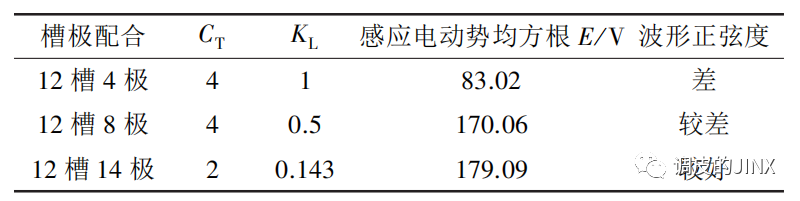
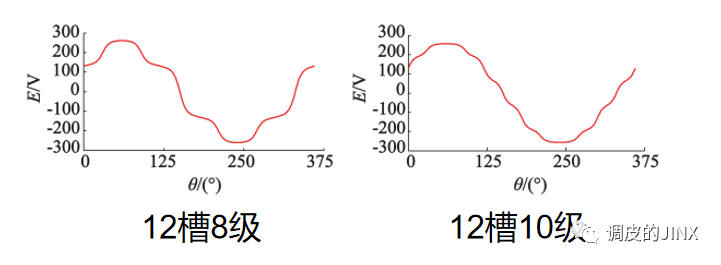
電機的感應電動勢與極槽配合有關。電機的評價因子CT相同時,電機的計算因子KL對感應電動勢的波形影響很大。計算因子KL越小,感應電動勢的幅值和波形的正弦度就越好。如果電機極槽配合的計算因子KL大,則該電機存在著感應電動勢正弦度差的先天不足,要采取多種手段才能提高感應電動勢波形的正弦度。
諧波
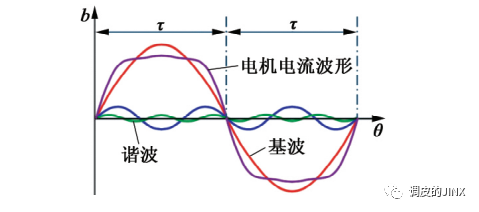
永磁同步電機一般采用正弦波控制的三相電源,理論上電機輸入的電壓和電流應該是理想的正弦波。但是由于各種原因,如電機氣隙磁場的畸變、電機轉速的變化、電機的齒槽轉矩等,引起輸入永磁同步電機的的電壓和電流發生了畸變,含有大量的諧波。諧波會對電機運行產生嚴重影響,使電機運行時產生振動、噪聲和溫升。
關于諧波的一些概念描述,可點擊下方鏈接直達。
諧波知識是電機理論最晦澀和豐富的部分,內容博大精深,我們以常見的整數槽為例進行說明。
整數槽三相永磁同步電機定子產生的諧波磁場只有奇數次。此時定子諧波次數:
v=(2mk1±1)p
其中,k1=±0、±1、±2......
永磁體諧波次數為:
v=(2mk2±1)p
其中,k1=0、1、2......
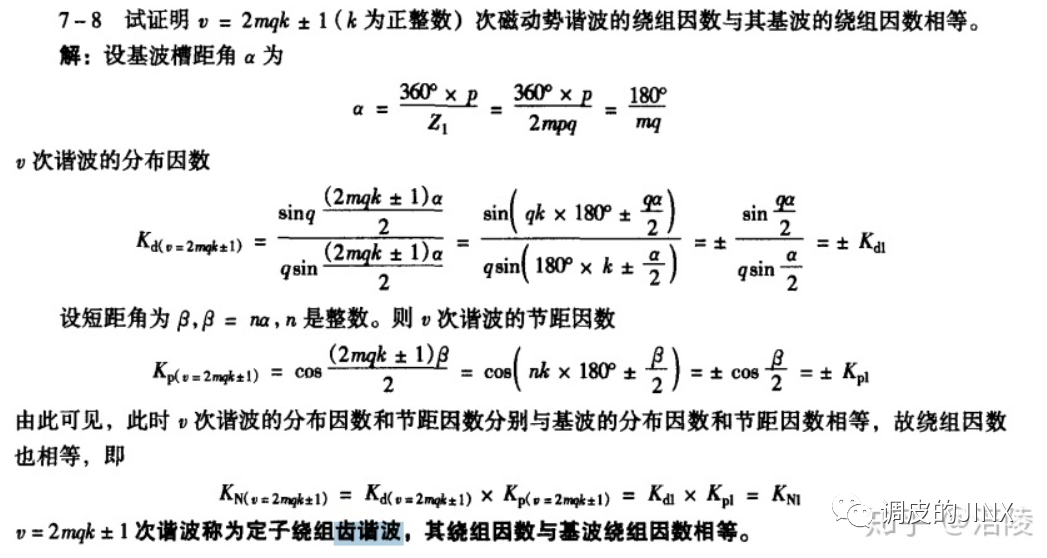
齒諧波中關注的是諧波次數主要是(Z/P)±1次。該諧波最大的特點是 繞組系數與基波繞組系數相等。 因為該次諧波與電機的基波磁密繞組系數相等,通過繞組形式并不能削弱該次諧波。知乎上涪陵答復中有證明過程。
引起電磁振動及噪聲的磁場及其諧波參數如表所示
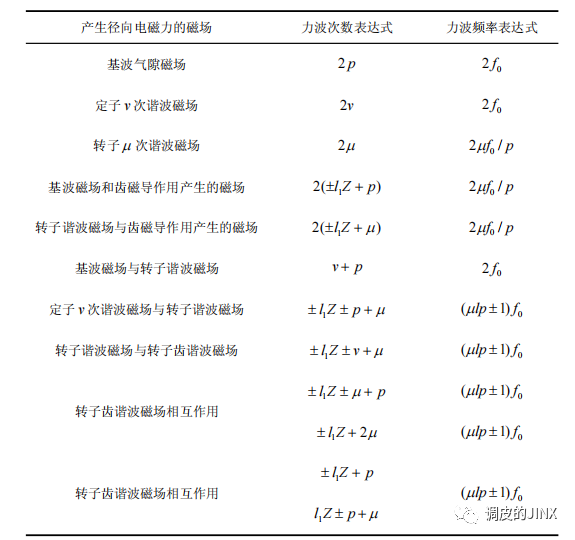
**上述可知,永磁同步電機的極槽配合和電機磁場諧波息息相關。**極槽配合應盡可能降低高次諧波。
主要性能參數
由公式f=NP/60我們知道,極對數P越大,電磁頻率f越大。而電磁頻率f越大,電機的損耗也就越大。
在電磁頻率和功率一定的情況下,極對數P如果越小,那么電機轉速也就越大,此時的電機扭矩也就越小。因此,為了提高峰值扭矩,往往會采用高的極對數。當然這是在一定前提條件下。
案例
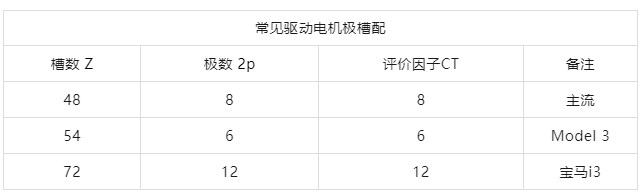
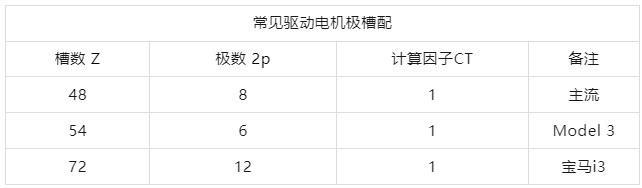
如前文所述,目前主流的極槽配合是8極48槽,但是Model 3采用的是6級54槽,是否就可以說Model 3的電磁設計糟糕呢?
6級54槽較8極48槽,評價因子CT更低,齒諧波次數更高,因此齒槽轉矩會更有利于控制。同時,極數更小,鐵耗也會更低。不足之處,峰值扭矩的提升相對劣勢。當然,Model 3可以選用更高的電流來彌補這個缺點。










 工商網監
工商網監
評論