 電子發燒友App
電子發燒友App


作者:Richard Anslow,系統工程高級經理
摘要
從定速電機轉向提供位置和電流反饋的變速電機,不僅可以實現工藝改進,還能節省大量能源。本文介紹了電機編碼器(位置和速度)、器件類型和技術以及應用案例。此外還解答了一些關鍵問題,例如對特定系統最重要的編碼器性能指標有哪些。本文將探討編碼器應用中電子器件的未來發展趨勢,包括設備健康監測和智能型長期穩健的檢測。最后,本文解釋了為什么完整的信號鏈設計是實現新一代電機編碼器設計的基礎。
電機編碼器性能指標、趨勢和電子器件
閱讀本文后,您應該能夠回答以下關鍵問題:
?什么是編碼器,它如何提高逆變器和電機驅動系統的性能?
?哪些編碼器性能指標對特定系統最重要?閱讀本文后,您將了解如何使編碼器的分辨率、精度和可重復性規格與電機和機器人系統規格相匹配。
?編碼器常用的電子元件有哪些,未來的發展趨勢是什么?閱讀本文后,您將了解設備健康監測、邊緣智能、穩定可靠的檢測和高速連接如何支持未來的編碼器設計。
閉環電機控制反饋系統
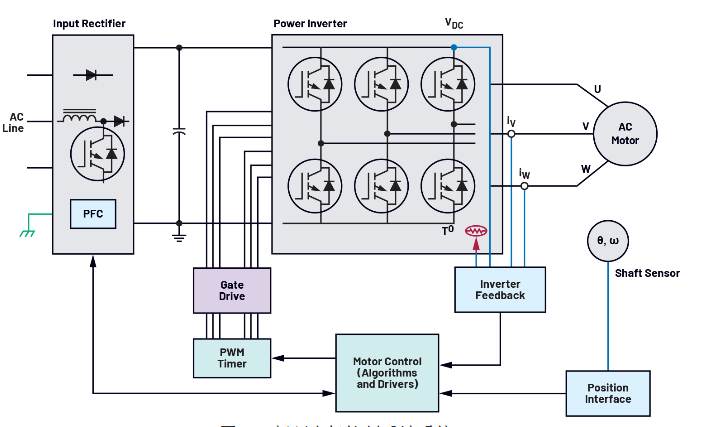
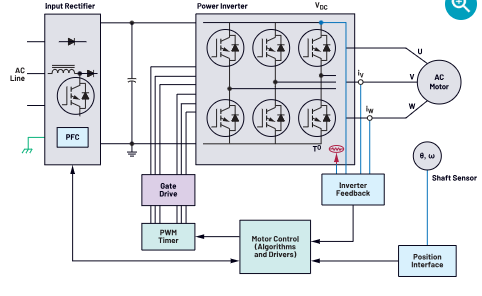
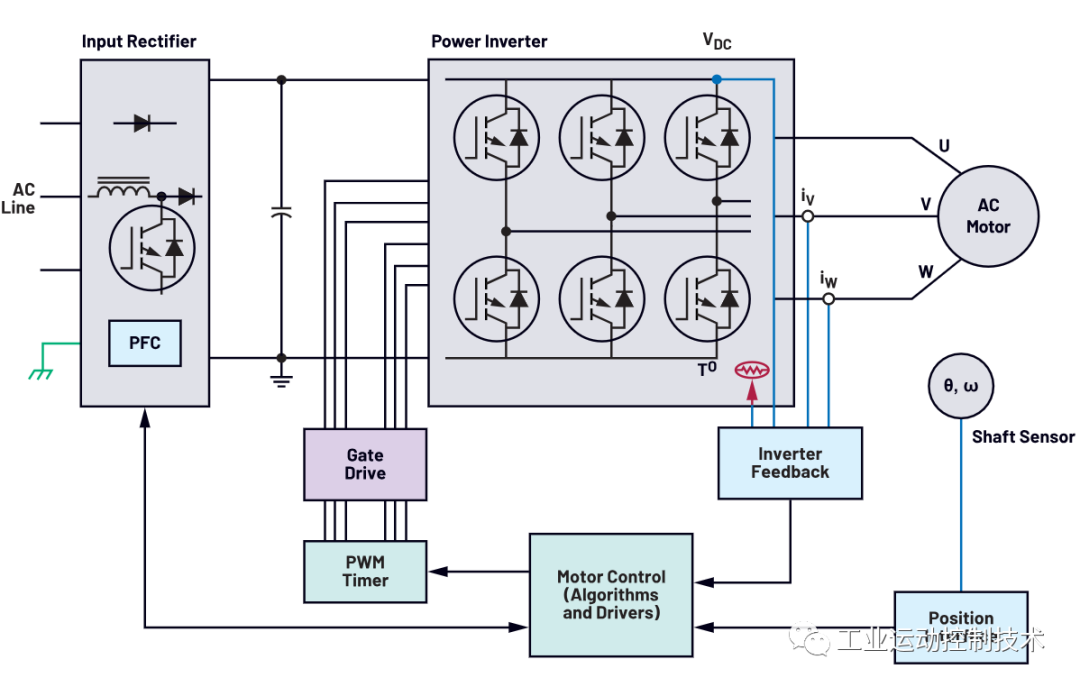
在過去的幾十年里,從傳統的并網電機向逆變器驅動電機的過渡一直在穩步、持續地進行。這是工業旋轉設備的重大轉型,通過提高電機和終端設備的使用效率,不僅實現了工藝改進,還能節省大量能源。變速驅動器和伺服驅動系統提高了電機控制性能,從而可以改善要求嚴苛應用的質量和同步功能。如圖1所示,功率級使用了功率逆變器、高性能位置檢測以及電流/電壓閉環反饋,因此電機性能和效率得以提高。
將變頻電壓施加于逆變器采用脈沖寬度調制的電機,可以實現對電機的開環速度控制。在穩態或緩慢變化的動態條件下,這將相當有效,并且較低性能應用中的許多電機驅動器采用開環速度控制,而不需要編碼器。但是,這種方法有幾個缺點:
?由于沒有反饋,速度精度很有限
?由于無法優化電流控制,電機效率很低
?必須嚴格限制瞬態響應,以免電機喪失同步
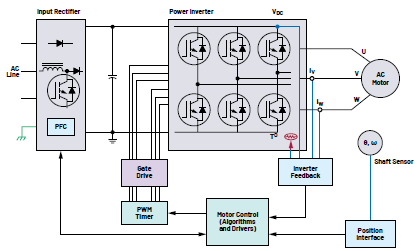
圖1.閉環電機控制反饋系統
什么是位置編碼器?
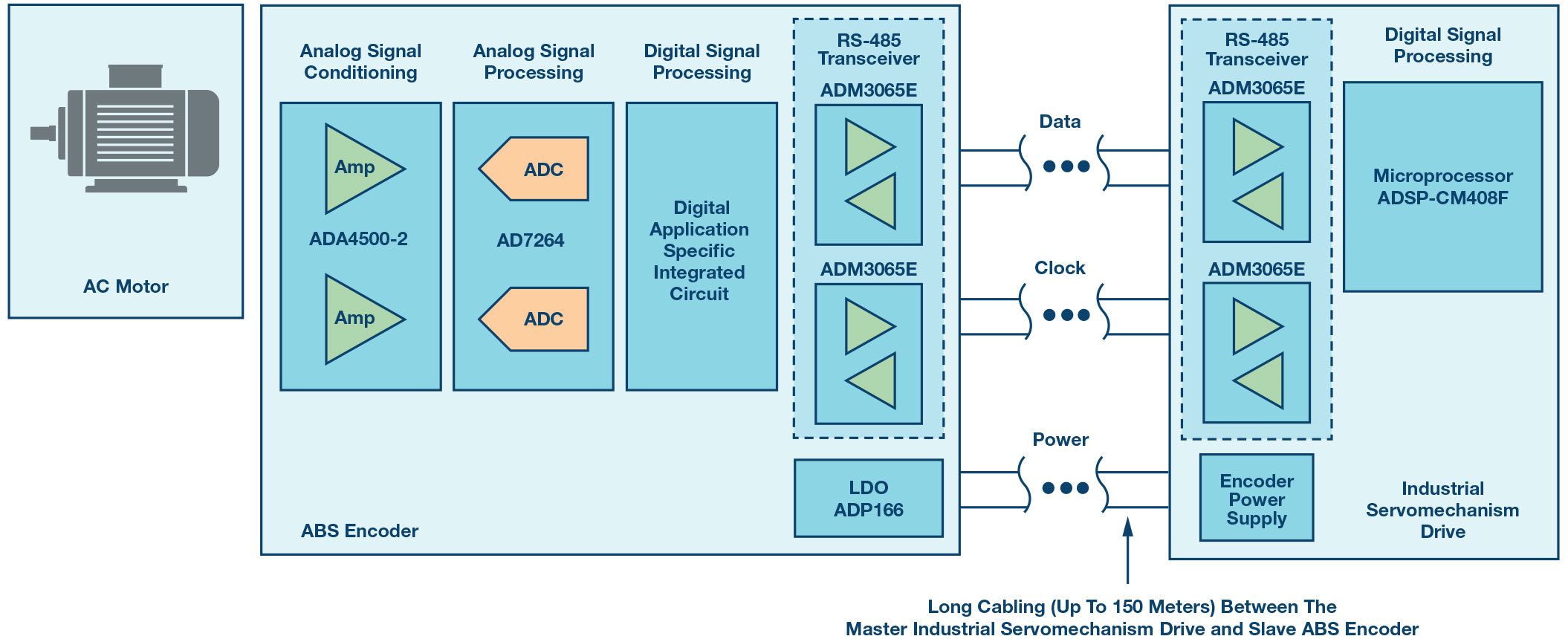
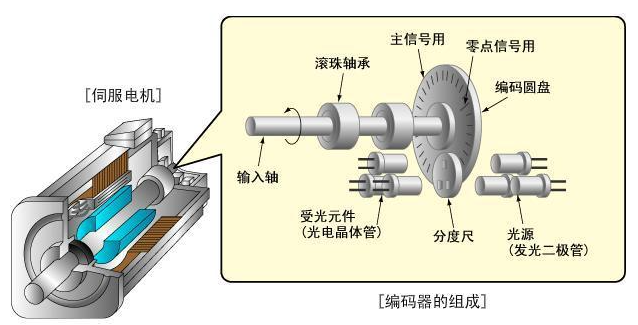
編碼器通過跟蹤旋轉軸的速度和位置來提供閉環反饋信號。光學和磁編碼器技術使用非常廣泛,如圖2所示。在通用伺服驅動器中,編碼器用于測量軸位置,從中可推導出驅動器轉速。機器人和離散控制系統需要準確且可重復的軸位置。光學編碼器由帶有精細光刻槽的玻璃圓盤組成。當光穿過圓盤或從圓盤反射時,光電二極管傳感器檢測光的變化。光電二極管的模擬輸出經過放大和數字化處理后,通過有線電纜發送到逆變器控制器。磁編碼器由安裝在電機軸上的磁體和磁場傳感器組成,傳感器提供正弦和余弦模擬輸出,輸出經過放大和數字化處理。光學和磁傳感器信號鏈類似,如圖2所示。
電機編碼器類型、技術和性能指標
單圈絕對值編碼器在通電后會返回機械或電氣360°范圍內的絕對位置信號。電機軸的位置可以立即讀取。多圈絕對值編碼器不僅具有絕對位置功能,而且能提供360°圈數計數。相比之下,增量編碼器提供相對于旋轉起點的位置。增量編碼器提供一個索引脈沖來指示0°,并提供一個單脈沖來計數圈數,或提供一個雙脈沖來提供方向信息。
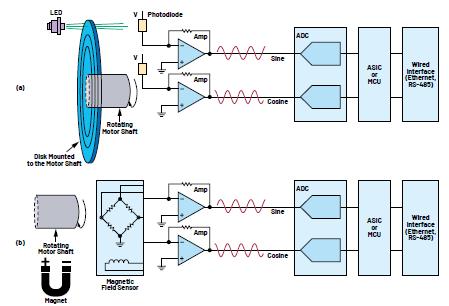
圖2.(a)?光學編碼器,(b)?磁編碼器
編碼器的分辨率是指電機軸旋轉360°時可以區分的位置數量。通常,最高分辨率的編碼器使用光學技術,而中高分辨率的編碼器使用磁或光學傳感器。中低分辨率編碼器使用旋變器(旋轉變壓器)或霍爾傳感器。光學或磁編碼器使用高分辨率信號調理。大多數光學編碼器是增量式的。編碼器可重復性是一項關鍵性能指標,用于衡量編碼器返回到同一指令位置的一致性。這對于重復性任務至關重要,例如在PCB制造過程中,放置半導體所用的機器人或貼片機須具有良好的可重復性。
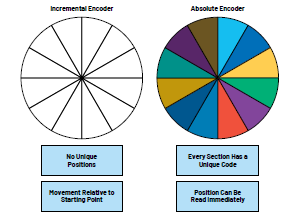
圖3.編碼器類型
表1.編碼器關鍵性能指標
?
| 指標 | 定義 | 備注 |
| 分辨率 | 編碼器每轉可區分的位置數(n) |
高分辨率:16位至24位 中分辨率:13位至18位 低分辨率:<12位 |
| 絕對精度 | 旋轉一圈后實際位置與報告位置之間的差異(類似于INL) | 位置控制應用依賴絕對精度 |
| 差分精度 | 兩個相鄰位置之間報告的距離與理想距離之差(類似于DNL) | 速度控制應用依賴差分精度 |
| 可重復性 | 編碼器返回到同一指令位置的一致性 | 可重復性對于重復性任務很重要,例如涉及機器人的任務 |
?
電機編碼器精度和可重復性的重要性
貼片機/機器人是食品包裝和半導體制造行業中常用的自動化機器。為了提高工藝效率,需要具有高精度和可重復性的機器或機器人。使用高性能電機編碼器可實現高精度、可重復性和高效率。
圖4展示了機器人中的編碼器應用案例。電機通過精密減速變速箱驅動機器臂中的每個關節。機器人關節角度通過電機上安裝的精密軸角編碼器(θm)和機器臂上安裝的附加編碼器(θj)來測量。
對于機器人,數據手冊上列出的主要性能規格是可重復性,其數量級通常在亞毫米級。在了解可重復性規格和機器人的作用范圍之后,就可以推斷旋轉編碼器的規格。
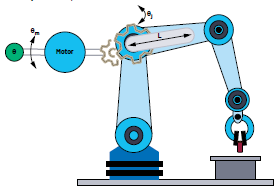
圖4.電機編碼器(θm)和關節編碼器(θj)的角度可重復性,以及機器人作用范圍(L)
關節編碼器所需的角度可重復性(θ)可從三角函數得出:機器人可重復性除以作用范圍的反正切。

多個關節結合起來可實現機器人的整體作用范圍。傳感器應具有比目標角度精度更高的性能。必須改善每個關節的可重復性規格,這里假設改進10倍。對于電機編碼器,可重復性由齒輪比(G)定義。
例如,對于表2所示的機器人系統,關節編碼器需要20位到22位的可重復性規格,而電機編碼器需要14位到16位的分辨率。
表2.編碼器可重復性和機器人可重復性規格
?
| 機器人系統 | 機器人1 | 機器人2 | |
| 假定齒輪比,G | 100 | ||
| 可重復性規格 | ±0.05 mm | ±0.01 mm | |
| 作用范圍,L | 1.30 m | 1.10 m | |
| 編碼器可重復性規格 | θ | 0.0022° | 0.0005° |
| θj/101 | 0.00022°(~20位) | 0.00005°(~22位) | |
| θm?= θj?× G | 0.02°(~14位) | 0.005°(~16位) | |
| 1由于機器人作用范圍由多個關節共同體現,因此單個編碼器必須具有更高的精度才能實現整體系統精度。 | |||
?
電機編碼器技術的未來發展趨勢
圖5說明了編碼器的未來發展趨勢和實現這些趨勢的技術。
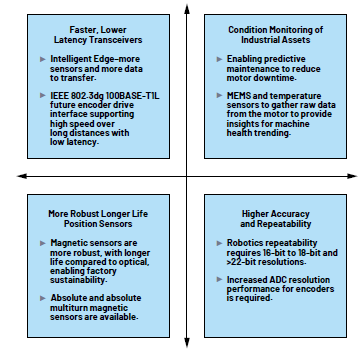
圖5.編碼器發展趨勢和實現這些趨勢的技術
Rockwell1關于伺服驅動器、編碼器和編碼器通信端口的研究表明,用于反饋通信的收發器每年增長20%。支持通過兩條線(IEEE 802.3dg標準100BASE-T1L)1進行100 Mbps通信的單對以太網(SPE)收發器目前正在研究中,未來的編碼器驅動接口將受益于低延遲,目標性能為≤1.5 μs。這種低延遲將支持更快的反饋數據采集和更短的控制環路響應時間。
對機器人和旋轉機器(例如渦輪機、風扇、泵和電機)實施的狀態監控會記錄與機器的健康和性能相關的實時數據,以便針對性地實施預測維護和優化控制。在機器生命周期的早期進行針對性的預測維護,可以減少生產停機的風險,從而提高可靠性、顯著節約成本和提高工廠的生產率。將MEMS加速度計放置在編碼器中可提供機器的振動反饋,這適合質量控制至關重要的應用。將MEMS加速度計添加到編碼器中會很方便,因為編碼器具有現成的布線、通信和電源,可以向控制器提供振動反饋。在數控(CNC)機床等一些應用中,從編碼器發送到伺服器的MEMS振動數據可用于實時優化系統性能。
使用CbM并結合穩健且壽命更長的位置傳感器,可以延長工業資產的使用壽命。磁傳感器產生指示周圍磁場角位置的模擬輸出,可以代替光學編碼器。磁編碼器可用于濕度較高、污垢嚴重和灰塵較大的區域。這些惡劣的環境會影響光學解決方案的性能和使用壽命。
對于機器人和其他應用,必須始終清楚機械系統的位置,哪怕在斷電的情況下也要明確知曉。標準機器人、協作機器人和其他自動化裝配設備在運行過程中突然斷電后,需要重新歸位并初始化電源,這些停機時間會帶來一定的相關成本并導致效率低下。由ADI公司開發的磁性多圈存儲器2不需要外部電源也能記錄外部磁場的旋轉次數,因而可以減小系統尺寸并降低成本。
對于機器人和協作機器人,電機編碼器和關節編碼器通常需要16位至18位ADC性能,在某些情況下需要22位ADC。有些光學絕對位置編碼器也需要高達24位分辨率的高性能ADC。
電機編碼器信號鏈
圖6、圖7、圖8和圖9展示了磁性(各向異性磁阻(AMR)和霍爾技術)、光學和旋變編碼器的編碼器信號鏈。主要元件分為五大類:
1.?? 使用磁傳感器(AMR、霍爾)跟蹤軸位置和速度
2.?? 設備健康狀況監測
a.????? MEMS傳感器
b.????? 溫度傳感器
3.?? 智能
a.????? 帶/不帶集成ADC的微控制器
4.?? 電纜接口
b.????? SPI轉RS-485擴展器收發器
5.?? 信號調理
a.????? 高性能ADC(12位至24位分辨率)
磁編碼器(AMR)
檢測
在磁位置傳感器應用領域,AMR傳感器兼具穩定可靠的性能和高精度。如圖6所示,傳感器通常位于安裝在電機軸上的偶極磁體對面。
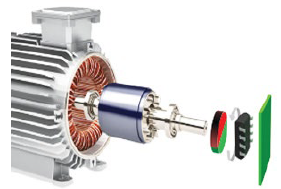
圖6.AMR傳感器系統
AMR傳感器對磁場方向變化很敏感,而霍爾技術對磁場強度很敏感。所以傳感器對系統中的氣隙和機械公差變化具有很強的容忍度,這一點很有優勢。此外,AMR傳感器的工作磁場沒有上限,因此,這種傳感器在高磁場下工作時幾乎不受雜散磁場的影響。
ADA4571是一款低延遲集成信號調理功能的AMR傳感器,提供單端模擬輸出。ADA4571單芯片解決方案提供良好的角度精度(典型角度誤差僅為0.10度),工作速度可高達50k rpm。ADA4571-2是雙通道版本,可提供完全冗余能力而不影響性能,適合安全關鍵型應用。
ADA4570是AAD4571的衍生產品,具有相同的性能,但提供差分輸出,適用于更惡劣的環境。ADA457x系列提供的高角度精度和可重復性改善了閉環控制,降低了電機扭矩紋波和噪聲。與競爭技術相比,單芯片架構提高了可靠性,減小了尺寸和重量,并且更易于集成。
信號調理和電源
AD7380?4 MSPS雙通道同步采樣、16位SAR ADC具有許多系統級優勢,包括節省空間的3 mm × 3 mm封裝,這對于空間受限的編碼器PCB板非常重要。4 MSPS吞吐速率確保捕捉到正弦和余弦周期的詳細信息,以及最新的編碼器位置信息。高吞吐速率支持實施片內過采樣,從而縮短數字ASIC或微控制器將準確的編碼器位置反饋給電機時的時間延遲。AD7380片內過采樣還有一個好處,它可以額外增加2位分辨率,從而與片內分辨率增強功能輕松配合使用。應用筆記AN-20033詳細介紹了AD7380的過采樣和分辨率增強功能。該ADC的VCC和VDRIVE以及放大器驅動器的電源軌可以由LDO穩壓器(例如LT3023)供電。ADP320、LT3023和LT3029等多路輸出低噪聲LDO可用來為信號鏈中的所有元件供電。
收發器
ADM3066E?RS-485收發器具備超低的發送器和接收器偏斜性能,所以非常適合用于傳輸精密時鐘,EnDat 2.2?4等電機控制標準通常要求精密時鐘。事實證明,ADM3065E在電機控制應用中采用典型電纜長度的確定性抖動小于5%。ADM3065E具有較寬的電源電壓范圍,因此這種時序性能水平也可用于需要3.3 V或5 V收發器電源的應用。有關更多信息,請參閱技術文章“利用現場總線提升速度,擴大覆蓋范圍”5。
微控制器
對于需要12位或更低分辨率的應用,可以用集成ADC的微控制器來代替AD7380 ADC。小巧的MAX32672超低功耗Arm?Cortex-M4F微控制器包含一個12位1 MSPS ADC,具有增強的安全性、外設和電源管理接口。
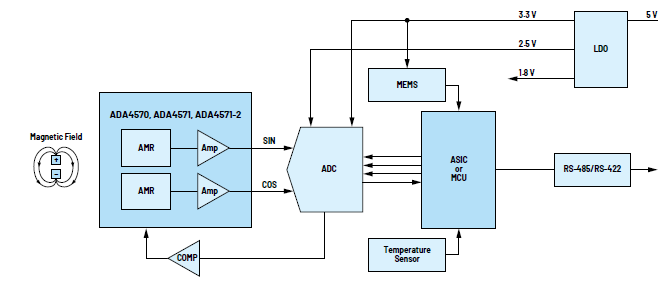
圖7.磁編碼器(AMR)信號鏈
資產狀況監控
ADXL371是一款超低功耗、3軸、數字輸出、±200g微機電系統(MEMS)加速度計,適用于機器監控。ADXL371性價比高,采用小型3 mm × 3 mm封裝,工作溫度高達+105°C。在即時導通模式下,ADXL371消耗1.7 μA的電流,同時能持續監測環境影響。當檢測到沖擊事件超過內部設定的閾值時,器件會切換到正常工作模式,其速度非常快以便記錄事件。
ADT7320是一款高精度數字溫度傳感器,無需用戶校準或校正,具有出色的長期穩定性和可靠性。ADT7320的額定工作溫度范圍為-40°C至+150°C,采用小型4 mm × 4 mm LFCSP封裝。
表3.磁編碼器(AMR)信號鏈推薦元件
?
| 元件 | 推薦產品型號 |
| MEMS加速度計 | ADXL371、ADXL372、ADXL314、ADXL375 |
| 溫度傳感器 | ADT7320 |
| 電源(LDO穩壓器) | ADP320、LT3023、LT3029 |
| ADC,12位、16位SAR | MAX11198、AD7380、AD7866 |
| AMR磁傳感器 | ADA4570、ADA4571、AD4571-2 |
| 雙通道比較器 | LTC6702 |
| 收發器(RS-485、RS-422) | MAX22506E、ADM3066E、ADM4168E、MAX22500E |
| 微控制器,集成ADC | MAX32672、MAX32662 |
?
光學編碼器
光學編碼器信號鏈元件與磁編碼器(AMR)部分介紹的元件幾乎相同。但是,為了支持更高的編碼器分辨率,建議使用AD7760?2.5 MSPS、24位、100 dB Σ-Δ ADC。它融合了寬輸入帶寬、高速特性和Σ-Δ轉換技術的優勢,2.5 MSPS時信噪比(SNR)可達100 dB,因此非常適合高速數據采集應用。
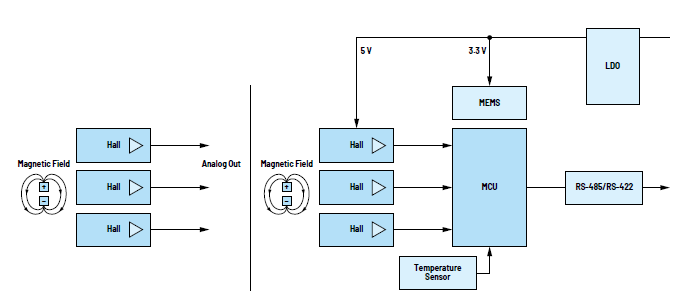
圖8.磁編碼器(霍爾)信號鏈
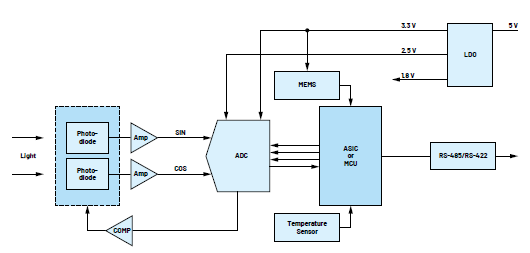
圖9.光學編碼器信號鏈
表5.光學編碼器信號鏈推薦元件
?
| 元件 | 推薦產品型號 |
| MEMS加速度計 | ADXL371、ADXL372、ADXL314、ADXL375 |
| 溫度傳感器 | ADT7320 |
| 電源(LDO) | ADP320、LT3023、LT3029 |
| ADC,12位、16位、24位 | MAX11198、AD7380、AD7866、AD7760 |
| 精密運算放大器 | ADA4622-4 |
| 雙通道比較器 | LTC6702 |
| 收發器(RS-485、RS-422) | MAX22506E、ADM3066E、ADM4168E、MAX22500E |
| 微控制器,集成ADC | MAX32672、MAX32662 |
?
旋變(耦合)編碼器
旋變編碼器具有一些優點,例如較高的機械可靠性和高精度;但與磁體和ADA4571相比,旋變器價格昂貴。
AD2S1200將來自旋變器的信號轉換為數字角度或角速率。圖10顯示了旋變器信號鏈。兩個放大器用于創建三階巴特沃斯低通濾波器,以將旋變器信號傳遞到AD2S1200。有關更多信息,請參閱電路筆記CN0276。
為節省空間并降低設計復雜性,建議使用LTC4332?SPI擴展器。LTC4332支持系統分區,提供了將微控制器置于伺服器中而非編碼器中的選項。如果編碼器需要微控制器,可以使用MAX32672 SPI接口直接連接AD2S1200,并且可以用ADM3065E RS-485收發器代替LTC4332。
如果使用LTC4332,AD2S1200 SPI輸出會轉換為穩健的差分現場總線接口。LTC4332包括三條從機選擇線,因此MEMS和溫度傳感器等額外傳感器可以與AD2S1200連接到同一條總線上。
表6.旋變編碼器信號鏈推薦元件
?
| 元件 | 推薦產品型號 |
| MEMS加速度計 | ADXL371、ADXL372、ADXL314、ADXL375 |
| 溫度傳感器 | ADT7320 |
| 電源(LDO穩壓器) | ADP120、ADP220、ADP320、LT3023、LT3029、LT3024、LT3027 |
| 精密運算放大器 | AD8694、AD8692、AD8397 |
| 收發器(SPI/RS-485、RS-485) | LTC4332、ADM3065E |
| 旋變數字轉換器 | AD2S1200、AD2S1205、AD2S1210 |
?
結論
ADI公司利用其深厚的領域專業知識和先進技術,幫助合作伙伴設計未來工業電機編碼器和網絡。利用小巧而強大的微控制器、ADXL371 MEMS加速度計和ADT7320溫度傳感器,可以輕松地將資產健康洞察能力集成到編碼器中。與光學或旋變器檢測解決方案相比,ADI公司先進的AMR磁傳感器(例如ADA4571)提高了可靠性,減小了尺寸和重量,并且更易于集成到編碼器中。采用AD7380或AD7760等中高端ADC可實現貼片機和機器人所需的高精度和可重復性。
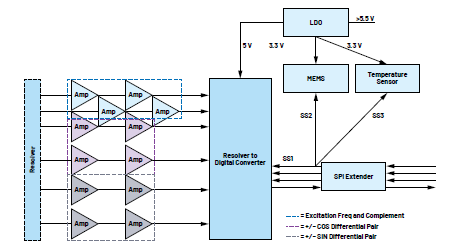
圖10.旋變編碼器信號鏈
1. Dayin Xu。“用于電機反饋通信的100BASE-T1L。”Rockwell Automation,2022年5月。
2. Stephen Bradshaw、Christian Nau和Enda Nicholl。“具有真正上電能力與零功耗的多圈位置傳感器(TPO)。”《模擬對話》,第56卷第3期,2022年9月。
3. Jonathan Colao。“ADI公司AD7380系列SAR ADC的片內過采樣。”ADI公司,2020年6月。
4. “EnDat 2.2——位置編碼器的雙向接口。”Heidenhain,2017年9月。
5. Richard Anslow和Neil Quinn。“利用現場總線提升速度,擴大覆蓋范圍。”ADI公司,2020年3月。
關于ADI公司
Analog Devices, Inc. (NASDAQ: ADI)是全球領先的半導體公司,致力于在現實世界與數字世界之間架起橋梁,以實現智能邊緣領域的突破性創新。ADI提供結合模擬、數字和軟件技術的解決方案,推動數字化工廠、汽車和數字醫療等領域的持續發展,應對氣候變化挑戰,并建立人與世界萬物的可靠互聯。ADI公司2022財年收入超過120億美元,全球員工2.4萬余人。攜手全球12.5萬家客戶,ADI助力創新者不斷超越一切可能。更多信息,請訪問www.analog.com/cn。
關于作者
Richard Anslow是ADI公司工業自動化事業部的高級經理,從事軟件系統設計工程工作。他的專長領域是狀態監控、電機控制和工業通信設計。他擁有愛爾蘭利默里克大學工程學士學位和工程碩士學位。最近,他完成了普渡大學人工智能(AI)和機器學習(ML)的研究生課程。
?













 工商網監
工商網監
評論