 電子發燒友App
電子發燒友App


FPGA 非常適合精密電機控制,在這個項目中,我們將創建一個簡單的電機控制程序,在此基礎上可以構建更復雜的應用。
介紹
我們可以用一個簡單的 8 位微控制器來控制電機,輸出一個簡單的脈寬調制波形。然而,當想要進行精密或高級電機控制時,沒有什么比 FPGA 的確定性和實時響應更好的了。接口的靈活性還使得可以通過單個設備控制多個電機,從而提供更加集成的解決方案。
首先,我們將學習一些有關電機控制理論的知識,并創建一個簡單的示例。我們都知道,我們可以通過PWM信號來驅動直流電機并控制其速度。然而,高效、精確地驅動它需要對電機控制理論有更多的了解。
電機
不管你信不信,我在大學最喜歡的課程之一是控制理論。在該模塊中,我們研究了交流電機和直流電機,了解理論和實際用例。有多種類型的交流電機由交流電源供電,可分為同步電機和感應電機。例如,交流電機通常用于泵和壓縮機。
直流電機分為有刷電機和無刷電機兩種。在兩種類型中,有刷是最容易驅動的,因為它們只需要一個電源。在有刷直流電機中,電刷向連接有轉子和線圈的換向器提供電流。電流在線圈中感應出電場,該電場被外部磁體(定子)排斥。為了確保旋轉,換向器的設計使得電流反向流動以確保連續旋轉。
第二種類型的直流電機是無刷電機,它們的驅動稍微復雜一些,因為它們沒有換向器。相反,磁體安裝在轉子上,線圈纏繞在定子周圍,這樣線圈的電流就可以從外部控制和排序。
兩者中最容易控制的是有刷直流電機,所以我們就以這類電機為例。
脈寬調制驅動
使用 PWM 驅動電機的理論是,可以控制電機得到的平均電壓,從而控制其速度。在 PWM 信號占空比為 100% 時,電機處于滿電壓并全速運行。如果提供 10% 的占空比,電機就會以其全速的 10% 運行。
然而,為了有效地運行電機,我們需要正確確定 PWM 周期。直流電機具有串聯電感和串聯電阻,這意味著電機將充當低通濾波器。頻率削減為
其中時間常數由 L/R 給出 - 我們可以從電機數據表中獲得這些值。
因此,為了確保穩定的速度,我們需要選擇高于電機頻率截止的 PWM 頻率,以確保觀察到直流分量。
因此,我們要選擇一個至少是截止頻率 5 倍的頻率。
FPGA
為了開始這個項目,我們首先要創建一個針對 FPGA 板的硬件設計。
開始創建一個新項目
為項目命名
選擇 RTL 項目但不指定來源
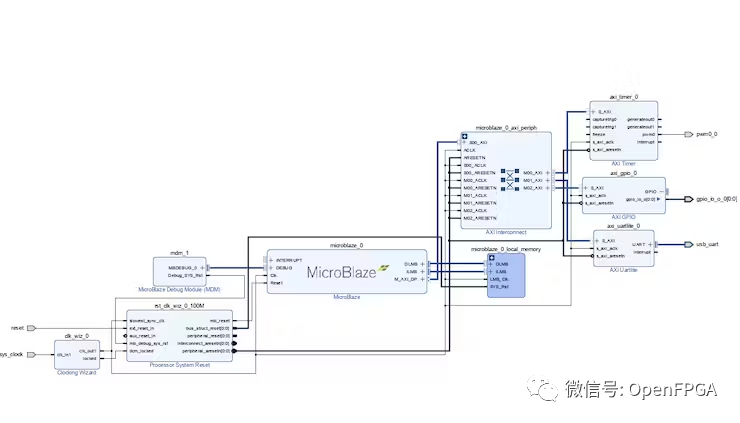
創建項目后,創建一個新的框圖
從“板”選項卡將系統時鐘拉到框圖上
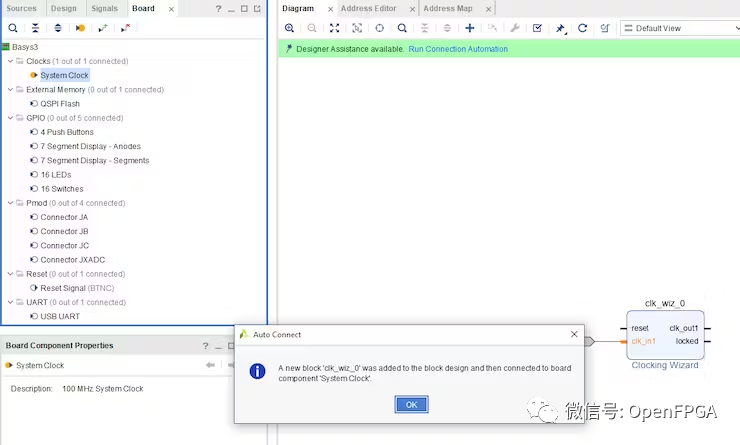
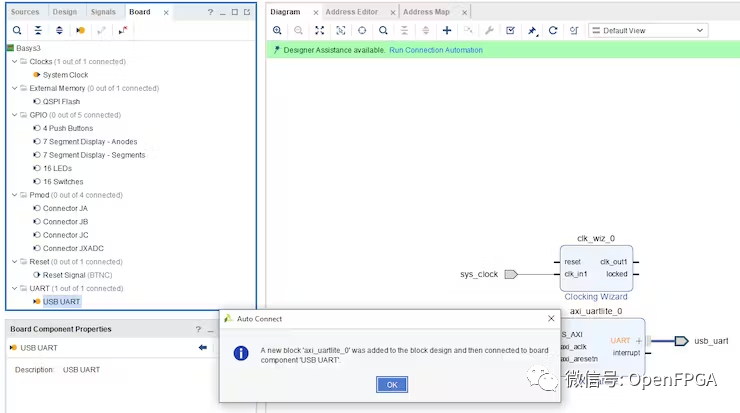
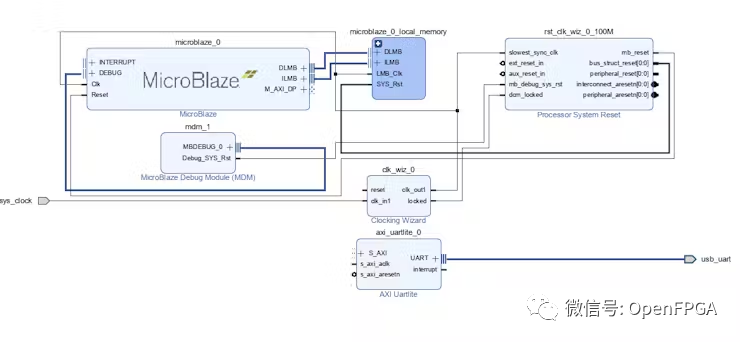
從 IP 庫添加 MicroBlaze 處理器
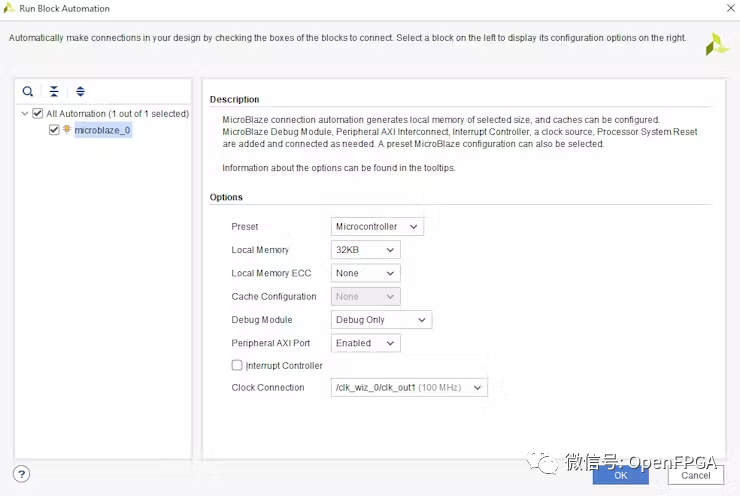
運行塊自動化連接,選擇本地內存大小為32KB并取消選中中斷控制器
添加 AXI 定時器
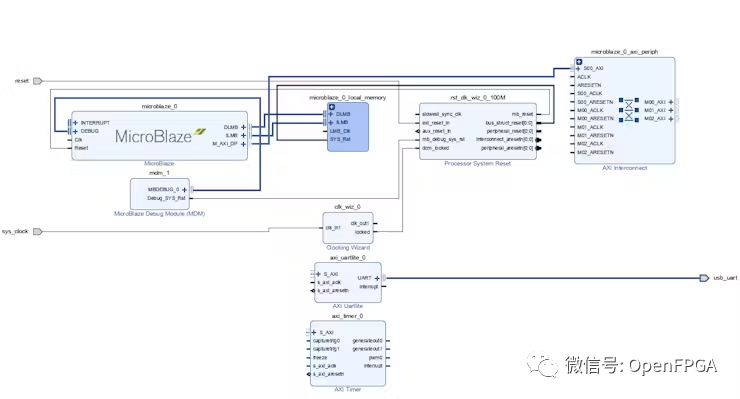
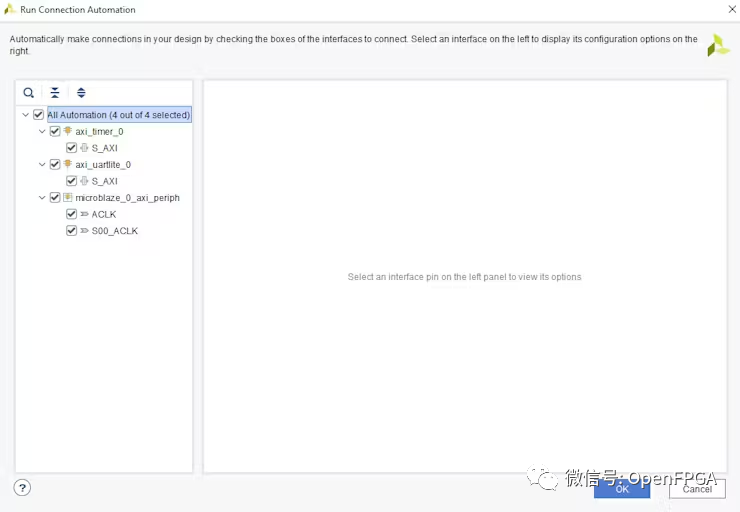
運行連接自動化
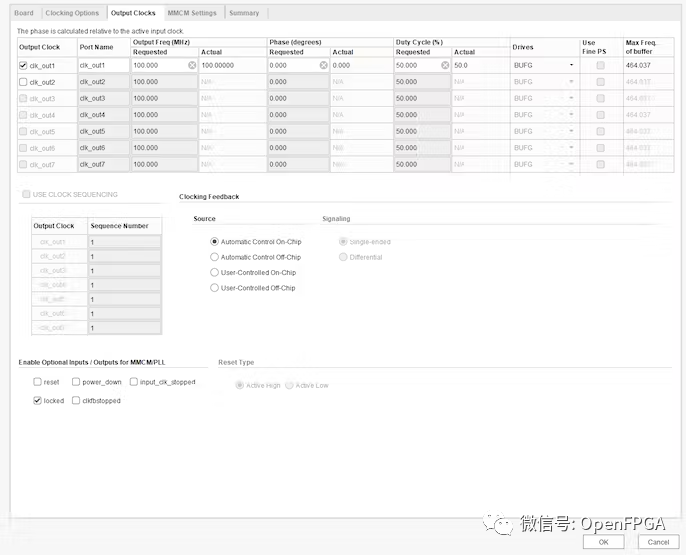
打開時鐘向導并取消選擇復位輸入
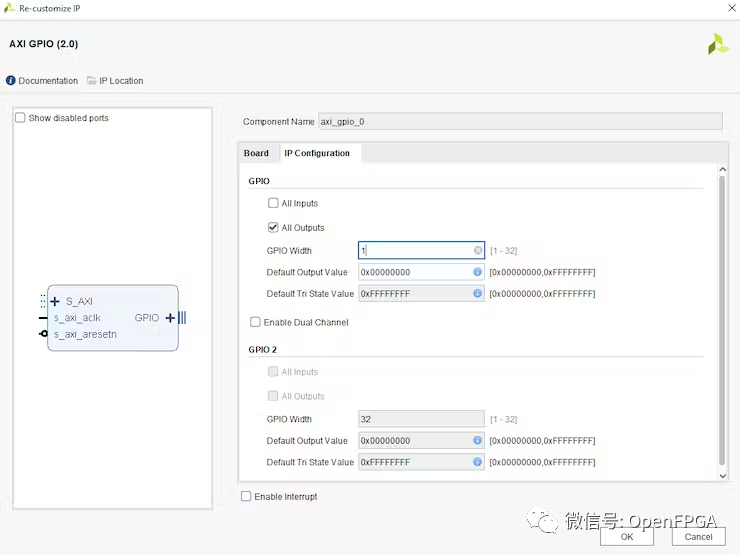
添加 GPIO
重新定制GPIO為1位寬,僅輸出
選擇 GPIO 輸出和 AXI 定時器 PWM 并將其設引出
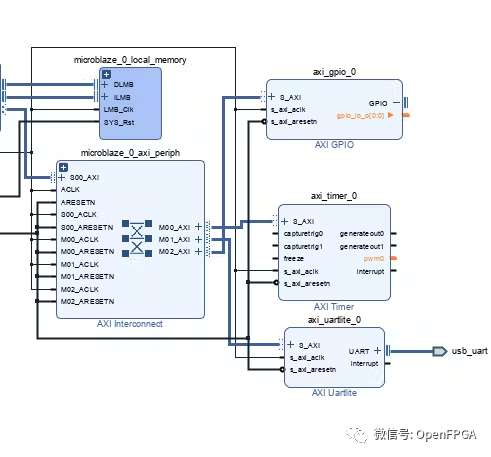
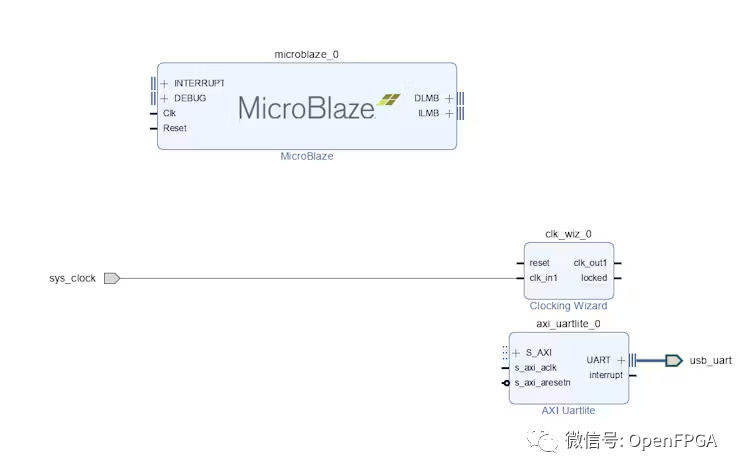
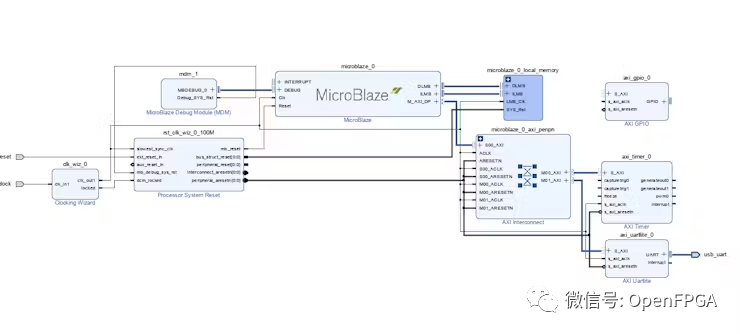
完成后應如下所示。
綜合完成后,我們可以打開綜合視圖并將 IO 分配給 GPIO 和定時器輸出 - 對于 GPIO,引腳是 J1,對于 PWM,引腳是 L2
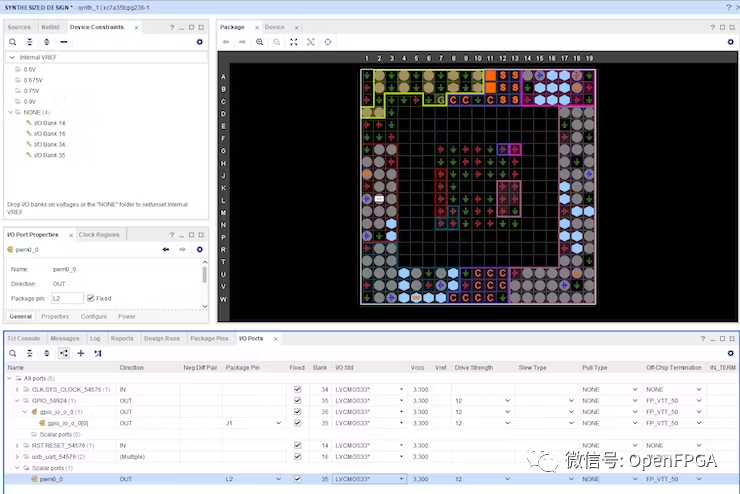
構建比特流并導出平臺
vitis設計
打開Vitis創建一個新的應用程序項目并選擇剛剛導出的XSA。
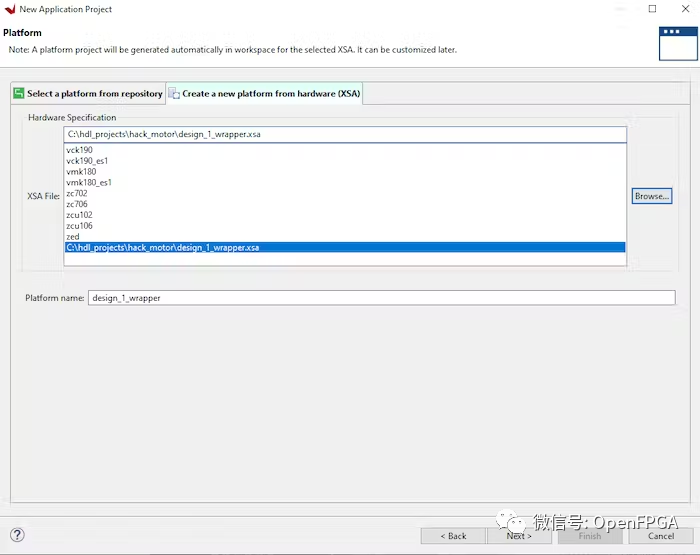
輸入項目名稱
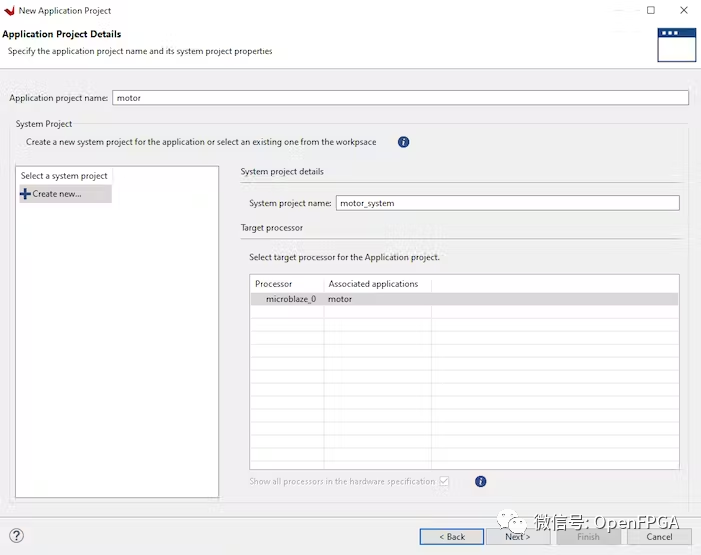
選擇獨立
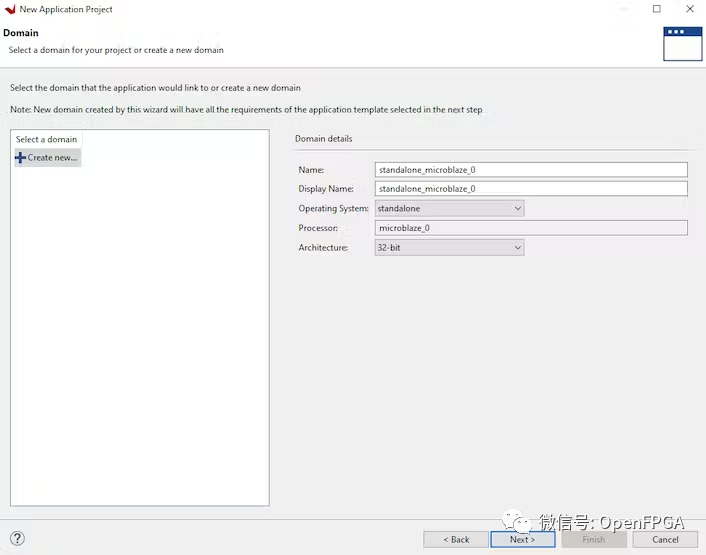
創建一個新的 hello world 應用程序
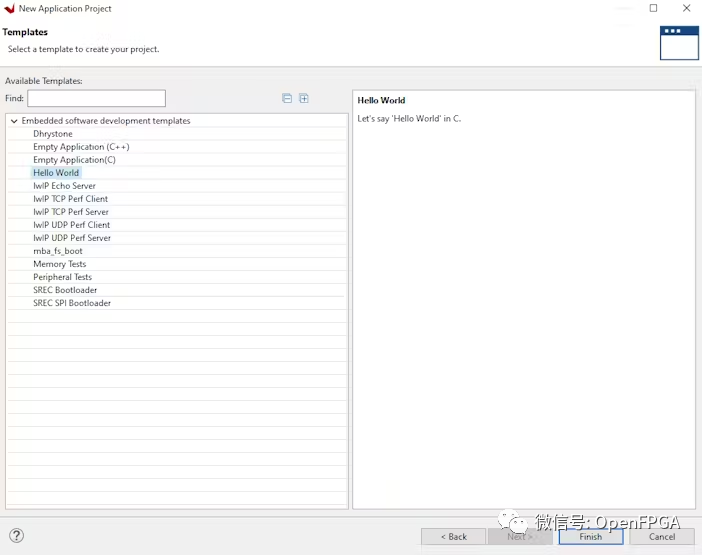
應用軟件非常簡單,我們將根據所需的 PWM 周期以及所需的占空比配置 AXI 定時器。
?
#include?#include?"platform.h" #include?"xil_printf.h" #include?"xtmrctr.h" #define?TMRCTR_DEVICE_ID????????XPAR_TMRCTR_0_DEVICE_ID #define?PWM_PERIOD??????????????1000000????/*?PWM?period?in?(500?ms)?*/ #define?TMRCTR_0????????????????0????????????/*?Timer?0?ID?*/ #define?TMRCTR_1????????????????1????????????/*?Timer?1?ID?*/ #define?CYCLE_PER_DUTYCYCLE?????10???????????/*?Clock?cycles?per?duty?cycle?*/ #define?MAX_DUTYCYCLE???????????100??????????/*?Max?duty?cycle?*/ #define?DUTYCYCLE_DIVISOR???????2????????????/*?Duty?cycle?Divisor?*/ XTmrCtr?TimerCounterInst; void?display_menu() { //Clear?the?screen xil_printf("?33[2J"); //Display?the?main?menu xil_printf("******************************************* "); xil_printf("****??????www.adiuvoengineering.com????**** "); xil_printf("****??????Motor?Control?Example????????**** "); xil_printf("******************************************* "); xil_printf(" "); xil_printf("???MM10?Motor?Control??? "); xil_printf("------------------------------------------ "); xil_printf(" "); xil_printf("Select?a?Speed: "); xil_printf("??(1)???-?Stop "); xil_printf("??(2)???-?25?%? "); xil_printf("??(3)???-?33?%? "); xil_printf("??(4)???-?50?%? "); xil_printf("??(5)???-?66?%? "); xil_printf("??(6)???-?75?%? "); xil_printf("??(7)???-?100?%? "); xil_printf(" "); } void?set_pwm(u32?cycle) { ?u32?HighTime; ?XTmrCtr_PwmDisable(&TimerCounterInst); ?HighTime?=?PWM_PERIOD?*?((?float)?cycle?/?100.0?); ?XTmrCtr_PwmConfigure(&TimerCounterInst,?PWM_PERIOD,?HighTime); ?XTmrCtr_PwmEnable(&TimerCounterInst); } int?main() { ?u8??Div; ?u32?Period; ?u32?HighTime; ?char?key_input; ?u8?DutyCycle; ????init_platform(); ????print("Hello?World "); ????print("Successfully?ran?Hello?World?application"); ????XTmrCtr_Initialize(&TimerCounterInst,?TMRCTR_DEVICE_ID); ????Div?=?DUTYCYCLE_DIVISOR; ????XTmrCtr_PwmDisable(&TimerCounterInst); ?Period?=?PWM_PERIOD; ?HighTime?=?PWM_PERIOD?/?Div--; ?XTmrCtr_PwmConfigure(&TimerCounterInst,?Period,?HighTime); ?XTmrCtr_PwmEnable(&TimerCounterInst); ?while(1){ ??display_menu(); ??read(1,?(char*)&key_input,?1); ??xil_printf("Echo?%c ",key_input); ??switch?(key_input)?{ ??case?'1':?//stop ??XTmrCtr_PwmDisable(&TimerCounterInst); ??break; ??case?'2':?//25% ???xil_printf("25% "); ??DutyCycle?=?25; ??set_pwm(DutyCycle); ??break; ??case?'3':?//33% ??DutyCycle?=?33; ??set_pwm(DutyCycle); ??break; ??case?'4':?//50% ??DutyCycle?=?50; ??set_pwm(DutyCycle); ??break; ??case?'5':?//66% ??DutyCycle?=?66; ??set_pwm(DutyCycle); ??break; ??case?'6':?//75% ??DutyCycle?=?75; ??set_pwm(DutyCycle); ??break; ??case?'7':?//100% ??DutyCycle?=?100; ??set_pwm(DutyCycle); ??break; ??} ?} ????cleanup_platform(); ????return?0; }
?
當然,我選擇的電機包含兩個霍爾效應傳感器.旋轉方向可以通過一個霍爾效應傳感器位于另一個霍爾效應傳感器前面的輸出來確定。
順時針旋轉
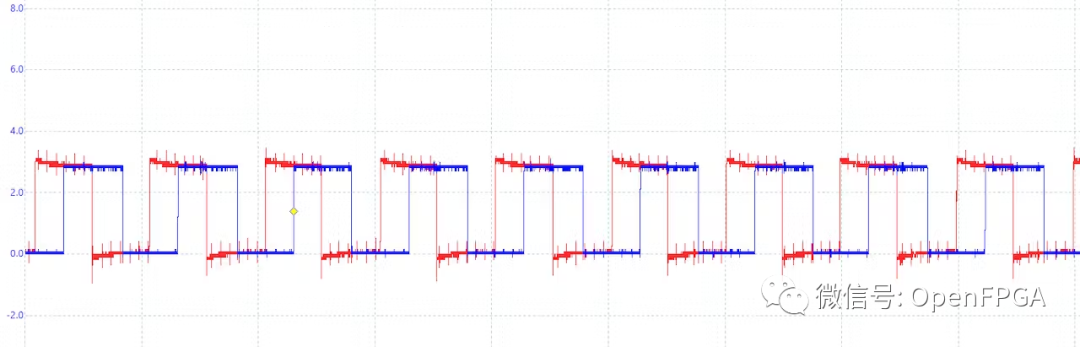
逆時針旋轉
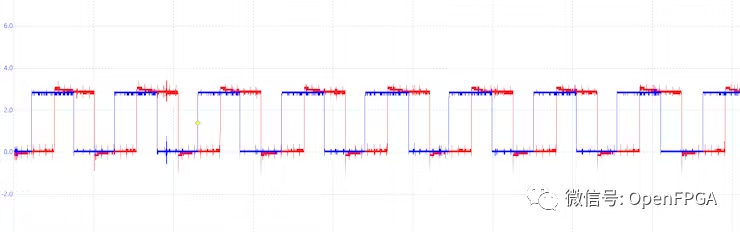
我們可以使用脈沖頻率來確定電機的速度,我們將在后面項目中更詳細地研究這一點。
審核編輯:劉清










 工商網監
工商網監
評論