導(dǎo)讀:本期文章主要是介紹電壓型磁鏈觀測(cè)器和電流型磁鏈觀測(cè)器。兩種磁鏈觀測(cè)器運(yùn)用到異步電機(jī)矢量控制中,外環(huán)磁鏈環(huán)用磁鏈觀測(cè)器形成閉環(huán),分析電壓型和電流型磁鏈觀測(cè)器的觀測(cè)性能。
2022-09-06 10:35:37 1281
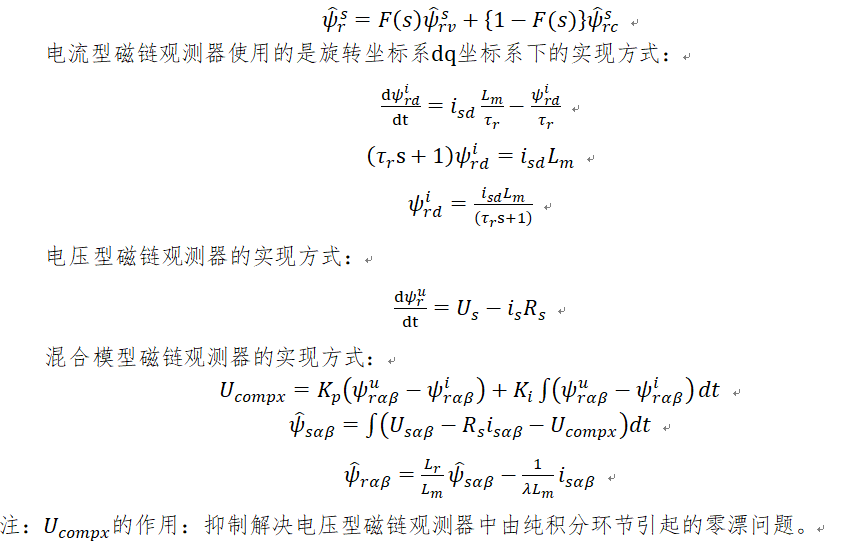
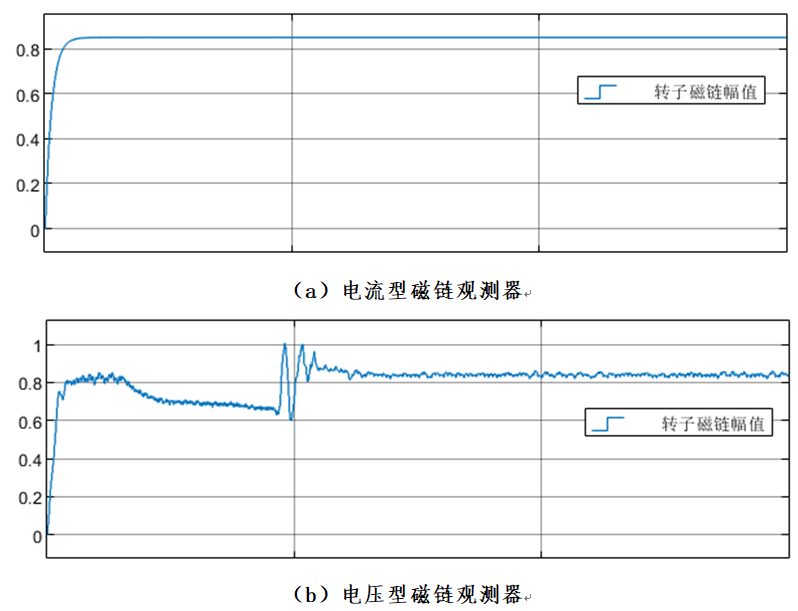
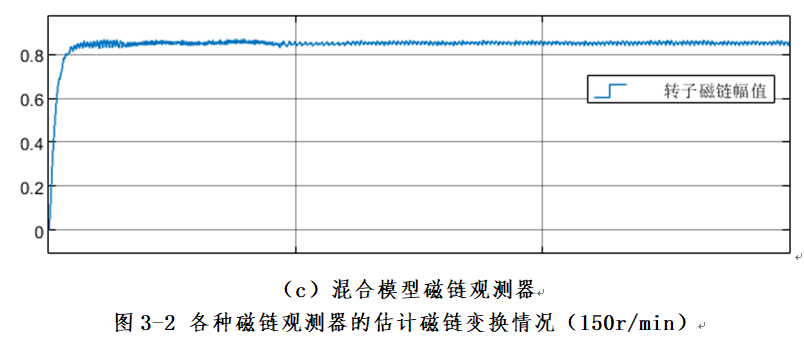
1281 導(dǎo)讀:本期文章主要介紹混合模型轉(zhuǎn)子磁鏈觀測(cè)器,其利用電流型磁鏈觀測(cè)器在低速區(qū)域的觀測(cè)優(yōu)勢(shì)和電壓型磁鏈觀測(cè)器在中、高速區(qū)域的觀測(cè)優(yōu)勢(shì)實(shí)現(xiàn)在全速范圍內(nèi)較為準(zhǔn)確的估算轉(zhuǎn)子磁鏈。
2022-11-21 10:16:03953 導(dǎo)讀:本期文章對(duì)異步電機(jī)直接轉(zhuǎn)矩控制進(jìn)行梳理學(xué)習(xí)。DTC包括轉(zhuǎn)速外環(huán)、磁鏈觀測(cè)器、滯環(huán)和電壓矢量離線開關(guān)表。離線電壓矢量開關(guān)表分為兩種:添加零矢量和未添加零矢量。
2023-09-25 10:26:07387 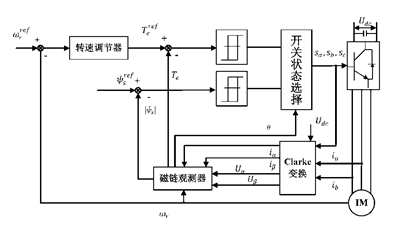
交流一個(gè)問題。轉(zhuǎn)差型矢量控制異步電機(jī),電流環(huán)控制理想,加上轉(zhuǎn)速環(huán)后,在正常運(yùn)行情況下,改變轉(zhuǎn)速給定,(變負(fù)或者w*-w過大)電動(dòng)機(jī)會(huì)失控(電機(jī)不斷加速,此時(shí)轉(zhuǎn)速與iq*相反)。有哪位做電機(jī)時(shí)碰到過這種問題,交流一下,多謝了
2018-05-14 10:00:41
學(xué)號(hào):課 程 設(shè) 計(jì)題 目異步電機(jī)矢量控制MATLAB仿真實(shí)驗(yàn)(矢量控制部分)學(xué) 院自動(dòng)化學(xué)院專 業(yè)自動(dòng)化專業(yè)班 級(jí)姓 名指導(dǎo)教師曹雪蓮2015年1月7日目錄摘要11異步電動(dòng)機(jī)矢量控制原理22坐標(biāo)
2021-09-03 07:06:48
學(xué)號(hào):課 程 設(shè) 計(jì)題 目異步電機(jī)矢量控制MATLAB仿真實(shí)驗(yàn)(矢量控制部分)學(xué) 院自動(dòng)化學(xué)院專 業(yè)自動(dòng)化專業(yè)班 級(jí)姓 名指導(dǎo)教師曹雪蓮2015年1月7日目錄摘要11異步電動(dòng)機(jī)矢量控制原理22坐標(biāo)
2021-09-06 06:29:37
先放下我做的完整異步電機(jī)矢量控制系列仿真框圖。異步電機(jī)的控制相比較于PMSM是更難的,我是從異步電機(jī)著手的,由難入簡(jiǎn),降維打擊- -我在做仿真前是每個(gè)小的仿真分開做的,在各個(gè)仿真完成后我把所有的集中
2021-08-27 06:32:00
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機(jī)驅(qū)動(dòng)器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd如圖,異步電機(jī)無速度傳感器控制中,觀測(cè)器在觀測(cè)磁鏈時(shí)需要用到轉(zhuǎn)速信息,而在速度估計(jì)時(shí)有需要用到磁鏈的信息,這樣不矛盾嗎?
2019-05-21 09:48:53
異步電機(jī)的矢量控制中磁鏈給定位什么是0.96
2016-04-22 09:01:03
系統(tǒng)中,轉(zhuǎn)子磁鏈難以直接測(cè)量。實(shí)際采用的是其觀測(cè)值,只有當(dāng)觀測(cè)值與實(shí)際值相等時(shí),才能達(dá)到矢量控制的有效性。因此,準(zhǔn)確的獲得轉(zhuǎn)子磁鏈值是實(shí)現(xiàn)矢量控制的關(guān)鍵。 按轉(zhuǎn)子磁場(chǎng)定向異步電機(jī)數(shù)學(xué)模型可推導(dǎo)
2016-01-21 15:40:59
?轉(zhuǎn)矩滯環(huán)比較模塊坐標(biāo)變換模塊電壓矢量選擇模塊輸出結(jié)果轉(zhuǎn)速?磁鏈轉(zhuǎn)矩結(jié)論異步電機(jī)直接轉(zhuǎn)矩控制(Asynchronous DTC)完整仿真框圖異步電機(jī)模塊磁鏈計(jì)算模塊內(nèi)部結(jié)構(gòu)...
2021-09-06 06:16:21
異步電機(jī)直接轉(zhuǎn)矩控制思想的產(chǎn)生交流電機(jī)的調(diào)速技術(shù)在20世紀(jì)70年代發(fā)生了根本性的變化,矢量控制的出現(xiàn)顛覆了傳統(tǒng)的交流調(diào)速系統(tǒng)控制方式,例如基于點(diǎn)擊穩(wěn)態(tài)模型的VVVFcontrol,vector
2021-09-06 09:25:41
異步電機(jī)轉(zhuǎn)矩變化率與電壓矢量的關(guān)系——用于MPC或DTC控制最近在學(xué)習(xí)MPC雙矢量的控制方法,一般而言,大家會(huì)選擇永磁同步電機(jī)PMSM作為控制對(duì)象,因?yàn)樗臄?shù)學(xué)模型相比于異步電機(jī)要簡(jiǎn)單得多。但是目前
2021-09-06 08:53:52
基本完善了開題時(shí)碩士畢業(yè)論文的電機(jī)控制系統(tǒng)概念,實(shí)現(xiàn)了基于概念的仿真模型。記此文檔以備忘。異步電機(jī)矢量控制系統(tǒng)中電流環(huán)控制器至于什么時(shí)異步電機(jī)矢量控制系統(tǒng),這里就不贅述了。可以參考陳伯時(shí)教授的《運(yùn)動(dòng)控制系統(tǒng)》,講的很詳細(xì)。涉及到許多概念,包括何為坐標(biāo)變換,以及...
2021-09-06 09:26:56
有感矢量控制異步電機(jī)空載電流和電機(jī)帶的慣量有關(guān)系嗎?實(shí)驗(yàn)中我發(fā)現(xiàn),帶大慣量速度到達(dá)之后空載電流會(huì)很大,比我設(shè)置的勵(lì)磁電流還大,例如電機(jī)額定勵(lì)磁是9A,帶3倍慣量啟動(dòng)后電流有20A,額定速度以下穩(wěn)定
2020-01-08 19:22:46
矢量控制方式——矢量控制,最簡(jiǎn)單的說,就是將交流電機(jī)調(diào)速通過一系列等效變換,等效成直流電機(jī)的調(diào)速特性,就這么簡(jiǎn)單,至于深入了解,那就得深入了解變頻器的數(shù)學(xué)模型,電機(jī)學(xué)等學(xué)科。矢量控制原理是模仿
2021-06-28 08:26:48
由于異步電機(jī)的動(dòng)態(tài)數(shù)學(xué)模型是一個(gè)高階、非線性、強(qiáng)耦合的多變量系統(tǒng)。上世紀(jì)70年代西門子工程師F.Blaschke首先提出異步電機(jī)矢量控制理論來解決交流電機(jī)轉(zhuǎn)矩控制問題。矢量控制實(shí)現(xiàn)的基本原理是通過
2021-09-09 07:09:49
文章目錄寫在前面SPWM異步電機(jī)矢量控制電流滯環(huán)矢量控制SVPWM矢量控制直流電機(jī)雙閉環(huán)控制傳遞函數(shù)模型半實(shí)物模型End寫在前面今天看了看電腦原來對(duì)文件,發(fā)現(xiàn)之前上過一門電傳課,學(xué)的時(shí)候做了很多很多
2021-09-06 08:38:23
用于異步電機(jī)矢量控制調(diào)速研究,因?yàn)閷?shí)驗(yàn)室有足夠的設(shè)備來做實(shí)驗(yàn),現(xiàn)在此實(shí)驗(yàn)室導(dǎo)師讓我來負(fù)責(zé),研究課題主要是基于DSP的電機(jī)控制,而且我對(duì)此有濃厚的興趣。特此申請(qǐng)!項(xiàng)目描述:實(shí)驗(yàn)室剛剛購(gòu)買了0.5KW
2015-09-10 11:21:38
Simulink永磁同步電機(jī)控制仿真系列六:使用電壓電流模型的位置估計(jì).引言1、電壓電流模型簡(jiǎn)介1.1.αβ坐標(biāo)系下的電壓方程1.2. αβ坐標(biāo)系下的磁鏈方程1.3. 磁鏈很重要2、建模實(shí)現(xiàn)2.1
2021-06-29 07:10:38
2.2傳統(tǒng)滑模觀測(cè)器的仿真結(jié)果總結(jié)前言本博客傳統(tǒng)滑模觀測(cè)器的設(shè)計(jì),是在矢量控制策略的基礎(chǔ)上,通過運(yùn)用滑模變結(jié)構(gòu)理論對(duì)反電勢(shì)進(jìn)行估計(jì),進(jìn)而提取電機(jī)的轉(zhuǎn)子信號(hào)和轉(zhuǎn)速信息。 永磁同步電機(jī)的無感控制是通過檢測(cè)電機(jī)繞組中的有關(guān)電信號(hào),采用一定的控制算法進(jìn)而實(shí)現(xiàn)轉(zhuǎn)子位置及速度估算。這無疑會(huì)大大降低電機(jī)控制的成本,
2021-08-27 08:07:21
在采用定子磁鏈定向控制策略時(shí),使用simulink自帶的異步電機(jī)模型當(dāng)做雙饋電機(jī)使用。但是在仿真時(shí)出現(xiàn)如下設(shè)置界面不知道參考坐標(biāo)系選“同步“坐標(biāo)系對(duì)不啊?
2012-09-30 11:31:42
對(duì)于觀測(cè)器的設(shè)計(jì),一般會(huì)選取一個(gè)數(shù)學(xué)模型進(jìn)行參照。而對(duì)于PMSM而言,一般會(huì)根據(jù)電機(jī)的電壓模型或者電流模型來設(shè)計(jì)觀測(cè)器。由于電機(jī)的負(fù)載狀態(tài)會(huì)影響擴(kuò)展反電動(dòng)勢(shì)的大小,而電機(jī)在高速重載的情況下,定子電流將會(huì)有較大的變化。因此,對(duì)于估算擴(kuò)展反電動(dòng)勢(shì)的滑模觀測(cè)器,按照PMSM的電流模型來設(shè)計(jì)會(huì)更合理。
2021-08-27 06:52:55
基于WLSVR的交流異步電力測(cè)功機(jī)觀測(cè)器交流變頻異步電力測(cè)功機(jī)是發(fā)動(dòng)機(jī)功率測(cè)試的主要設(shè)備。它測(cè)功機(jī)作為發(fā)動(dòng)機(jī)的負(fù)載裝置,不僅被用來吸收并測(cè)量被測(cè)發(fā)動(dòng)機(jī)輸出的功率,而且可通過控制它的工作狀態(tài)改變發(fā)動(dòng)機(jī)
2009-05-17 11:56:25
摘要:永磁同步電機(jī)的定子磁鏈觀測(cè)技術(shù)是實(shí)現(xiàn)直接轉(zhuǎn)矩控制的基礎(chǔ)。傳統(tǒng)的電壓模型定子磁鏈觀測(cè)器中存在著直流偏置、積分飽和等問題,因此本文采用改進(jìn)的二階廣義積分器(improved
2018-10-19 09:55:40
在網(wǎng)上找了很久沒有找到合適的基于轉(zhuǎn)子磁鏈定向的矢量控制仿真。最后自己終于根據(jù)理論完成了仿真,在此做一個(gè)關(guān)于仿真的內(nèi)容描述,仿真的實(shí)際文件會(huì)上傳到博客中。(一)仿真主體仿真的主體框圖如上所示,主要
2021-09-06 09:07:57
在對(duì)異步電機(jī)矢量控制系統(tǒng)分析的基礎(chǔ)上,給出了參數(shù)優(yōu)化設(shè)計(jì)的數(shù)學(xué)模型,采用了一種改進(jìn)的遺傳算法,并利用Matlab軟件對(duì)PID參數(shù)進(jìn)行了優(yōu)化設(shè)計(jì),得到了滿意的優(yōu)化參數(shù).討論了遺傳算法的一些關(guān)鍵技術(shù),如
2019-12-10 15:40:08
如何利用永磁同步電機(jī)的電壓電流模型對(duì)轉(zhuǎn)子磁鏈進(jìn)行直接觀測(cè)?
2021-10-21 07:00:38
如何去實(shí)現(xiàn)一種基于磁鏈模型的非線性觀測(cè)器設(shè)計(jì)呢?如何對(duì)其模型進(jìn)行仿真?其波形是怎樣的?
2021-11-19 07:34:36
在完成了矢量控制的基本仿真后,我卻發(fā)現(xiàn)仿真中Isd勵(lì)磁電流的波形仍然存在一些問題,因此我去掉磁鏈環(huán)直接通過給定勵(lì)磁電流的方式進(jìn)行仿真,仿真運(yùn)行后先給定額定isd電流建立磁場(chǎng),在0.5s后給定轉(zhuǎn)速
2021-09-06 09:28:25
愛自己是一生浪漫的開始。??電機(jī)控制中,無論什么觀測(cè)器,最終都是為了得到電機(jī)的電角度跟角速度,這里就通過轉(zhuǎn)矩方程來進(jìn)行簡(jiǎn)單的速度環(huán)矢量控制模型。??目標(biāo):搭建簡(jiǎn)單的由轉(zhuǎn)矩方程計(jì)算角度速度的矢量控制
2021-06-28 10:08:45
和雙矢量或者可以成為三矢量的有限集預(yù)測(cè)控制)和無差拍預(yù)測(cè)控制,模型預(yù)測(cè)控制可以是單環(huán)模型預(yù)測(cè)控制和雙環(huán)模型預(yù)測(cè)控制,(基于龍伯格負(fù)載觀測(cè)器)(foc控制)轉(zhuǎn)矩,本人自己做的,有不懂的也可以交流一下,+v:lang1578382118,數(shù)字是企鵝,有需要的可以來找我...
2021-07-05 07:18:55
大,定子電流和定子電阻損耗減小,且轉(zhuǎn)子參數(shù)可測(cè)、控制性能好;但它與異步電機(jī)相比,也有成本高、起動(dòng)困難等缺點(diǎn)。和普通同步電動(dòng)機(jī)相比,它省去了勵(lì)磁裝置,簡(jiǎn)化了結(jié)構(gòu),提高了效率。永磁同步電機(jī)矢量控制系統(tǒng)能夠?qū)崿F(xiàn)
2014-01-22 09:46:51
在異步電機(jī)矢量控制中,磁鏈的給定值怎么計(jì)算?我怎么知道我這個(gè)磁鏈的給定值應(yīng)該設(shè)置成多少??在電流控制器后一個(gè)電壓的前饋解耦環(huán)節(jié)?不說很清楚解耦環(huán)節(jié)的公式怎么來的?不知道有哪位朋友能夠提供思路或者提供在這兩個(gè)問題上講得比較清楚的文檔?
2016-11-23 20:54:55
要求:1.異步電機(jī)不考慮鐵耗的矢量控制仿真2.異步電機(jī)考慮鐵耗的矢量控制仿真 3.異步電機(jī)在最優(yōu)轉(zhuǎn)子磁鏈下加入鐵耗補(bǔ)償?shù)?b class="flag-6" style="color: red">矢量控制仿真4.異步電機(jī)在最優(yōu)電流比下加入鐵耗補(bǔ)償?shù)?b class="flag-6" style="color: red">矢量控制仿真。可以提供仿真數(shù)學(xué)模型。可以做的聯(lián)系qq:1205368612。價(jià)格面議。
2016-12-14 17:08:55
標(biāo)題# 異步電機(jī)矢量分析與控制一、 旋轉(zhuǎn)異步電機(jī)的矢量描述方法1 異步電機(jī)的結(jié)構(gòu)1.1 異步電機(jī)定子異步電機(jī)定子有三個(gè)空間對(duì)稱分布繞組,相互之間角度差120°;如圖1所示,定子三相繞組分布處于A、B
2021-09-06 07:28:06
之前一直使用PI控制器做異步電機(jī)矢量控制,最近想把ADRC控制也放到異步電機(jī)矢量控制上去,所以對(duì)其進(jìn)了仿真,可遇到了一個(gè)一直沒有解決掉的問題,現(xiàn)記錄下來,請(qǐng)各位先輩進(jìn)行指教以及為遇到同樣問題的人
2021-08-27 06:55:33
(1)三相異步電機(jī)參數(shù)辨識(shí)、直接轉(zhuǎn)矩控制DTC、矢量控制FOC、基于模型參考自適應(yīng)MRAS的無速度傳感器矢量控制等各類仿真模型;(2)永磁同步電機(jī)參數(shù)辨識(shí)、初始位置檢測(cè)、查表法dq電流查詢表自動(dòng)生成
2019-07-29 15:41:00
,形成轉(zhuǎn)子磁場(chǎng)。由此可得,三相異步電機(jī)模型可以分為電壓方程、磁鏈方程、轉(zhuǎn)矩方程和運(yùn)動(dòng)方程。電壓方程:定子電壓方程:轉(zhuǎn)子電壓方程:寫成矩陣方程,用P=:可以簡(jiǎn)寫 成:同理推導(dǎo),磁鏈方...
2021-09-06 07:37:56
要求:1.異步電機(jī)不考慮鐵耗的矢量控制仿真2.異步電機(jī)考慮鐵耗的矢量控制仿真 3.異步電機(jī)在最優(yōu)轉(zhuǎn)子磁鏈下加入鐵耗補(bǔ)償?shù)?b class="flag-6" style="color: red">矢量控制仿真4.異步電機(jī)在最優(yōu)電流比下加入鐵耗補(bǔ)償?shù)?b class="flag-6" style="color: red">矢量控制仿真。可以提供仿真數(shù)學(xué)模型。可以做的聯(lián)系qq:1205368612。價(jià)格面議。
2016-12-14 17:10:06
實(shí)現(xiàn)高性能直接轉(zhuǎn)矩控制系統(tǒng)的重要環(huán)節(jié)是準(zhǔn)確地觀測(cè)異步電機(jī)的定子磁鏈。本文將一種新型的速度自適應(yīng)磁鏈閉環(huán)觀測(cè)器,應(yīng)用于直接轉(zhuǎn)矩控制系統(tǒng)中,取代了傳統(tǒng)的積分器,
2009-07-06 08:28:42 22
22 直接力矩控制是交流調(diào)速中一種新穎、有效的控制方法。首先介紹了異步電機(jī)的數(shù)學(xué)模型,在此基礎(chǔ)上對(duì)直接力矩控制進(jìn)行了理論分析,并介紹其磁通、力矩控制方法,給出磁通觀測(cè)器
2009-07-16 09:58:4921 對(duì)矢量控制系統(tǒng)動(dòng)態(tài)結(jié)構(gòu)進(jìn)行了研究, 應(yīng)用狀態(tài)估計(jì)與狀態(tài)觀測(cè)器理論, 提出了新型磁通觀測(cè)器結(jié)構(gòu)和速度推算方法, 對(duì)控制系統(tǒng)進(jìn)行建模, 并用仿真實(shí)驗(yàn)證明所提方案的磁通觀測(cè)器
2009-07-17 08:22:0126 本文提供了一種基于滑模觀測(cè)器的永磁同步電機(jī)矢量控制系統(tǒng)的實(shí)施方案。設(shè)計(jì)一滑模觀測(cè)器,對(duì)永磁同步電機(jī)的轉(zhuǎn)子位置角和轉(zhuǎn)速進(jìn)行實(shí)時(shí)在線估算,實(shí)現(xiàn)電機(jī)的閉環(huán)調(diào)速運(yùn)行。
2009-08-10 15:23:4637
分析了異步電機(jī)直接轉(zhuǎn)矩控制控制理論;提出了一種利用電機(jī)定子電壓電流,采用新型的混合型定子磁鏈觀測(cè)器來辨識(shí)異步電機(jī)速度的方法;介紹了一種基于TMS320LF
2009-10-15 11:21:5124 采用滑模變結(jié)構(gòu)的異步電機(jī)矢量控制系統(tǒng):根據(jù)三相電機(jī)和滑模變結(jié)構(gòu)理論提出同時(shí)估計(jì)異步電機(jī)磁鏈和轉(zhuǎn)速的變結(jié)構(gòu)觀測(cè)方法,并同時(shí)實(shí)時(shí)檢測(cè)重要的時(shí)變電機(jī)參數(shù)轉(zhuǎn)子時(shí)間常數(shù),
2009-11-18 11:14:4928 介紹一種以DSP為控制核心的異步電機(jī)矢量控制系統(tǒng)在電動(dòng)車中的應(yīng)用。介紹了系統(tǒng)結(jié)構(gòu)及軟硬件設(shè)計(jì)方案。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)精度高,實(shí)時(shí)性好,有較好的動(dòng)態(tài)性能。
2010-01-11 16:52:4142 介紹一種以DSP為控制核心的異步電機(jī)矢量控制系統(tǒng)在電動(dòng)車中的應(yīng)用。介紹了系統(tǒng)結(jié)構(gòu)及軟硬件設(shè)計(jì)方案。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)精度高,實(shí)時(shí)性好,有較好的動(dòng)態(tài)性能。
2010-07-13 16:17:4742 基于DSP的異步電機(jī)矢量控制系統(tǒng)設(shè)計(jì)
0 引言
隨著現(xiàn)代控制理論、微處理技術(shù)和電力電子技術(shù)的不斷發(fā)展,基于矢量控制的高性能交流傳動(dòng)系統(tǒng)得到廣泛
2010-01-22 11:24:231983 
異步電機(jī)的模糊PID矢量控制-2010。
2016-04-06 14:10:2921 SVPWM調(diào)制異步電機(jī)矢量控制系統(tǒng)的原理與仿真
2016-04-15 17:49:5353 基于DSP的交流異步電機(jī)閉環(huán)矢量解耦控制系統(tǒng)
2016-04-18 09:37:4919 基于DSP的交流異步電機(jī)閉環(huán)矢量控制系統(tǒng)的研究
2016-04-18 09:47:4910 基于DSP的異步電機(jī)無速度傳感器矢量控制系統(tǒng)的研究與實(shí)現(xiàn)
2016-04-18 09:47:4921 基于SVPWM的異步電機(jī)矢量控制調(diào)速系統(tǒng)仿真
2016-04-18 10:46:5332 基于矢量控制原理的異步電機(jī)調(diào)速系統(tǒng)的研究與設(shè)計(jì)
2016-03-30 18:24:1421 異步電機(jī)SVPWM的矢量控制系統(tǒng)研究,下來看看
2016-03-30 14:40:3216 異步電機(jī)SVPWM矢量控制仿真分析,下來看看
2016-03-30 14:40:3216 異步電機(jī)SVPWM矢量控制系統(tǒng)仿真,下來看看
2016-03-30 14:40:3228 交流異步電機(jī)電壓解耦矢量控制系統(tǒng)的研究。
2016-04-25 10:00:2710 基于反電動(dòng)勢(shì)滑模觀測(cè)器的異步電機(jī)矢量控制_楊淑英
2017-01-07 18:21:318 異步電機(jī)全階磁鏈觀測(cè)器反饋矩陣設(shè)計(jì)_鄧歆
2017-01-08 13:38:536 異步電機(jī)_矢量控制
2017-11-29 15:41:0116 基于MATLAB異步電機(jī)矢量控制系統(tǒng)的建模與仿真
2018-05-08 10:29:2237 近年來,異步電機(jī)的無速度傳感器矢量控制成為研究熱點(diǎn)。目前,異步電機(jī)無速度傳感器矢量控制在中高速段已獲得良好的控制性能,但在極低速段(<1Hz)卻仍未實(shí)現(xiàn)良好的控制。這是因?yàn)槌S玫?b class="flag-6" style="color: red">異步電機(jī)無速度傳感器
2019-09-30 07:57:003894 
無速度傳感器感應(yīng)電機(jī)具有價(jià)格低和高可靠性等優(yōu)點(diǎn), 為取代速度傳感器, 提出了一種基于TMS320LF2812 DSP的無位置傳感器異步電機(jī)矢量控制系統(tǒng)。文章主要介紹了矢量控制的基本方程, 并根據(jù)這些
2019-06-21 15:43:4423 將異步電機(jī)調(diào)速的矢量控制方法與電壓空間矢量脈寬調(diào)制(SVPWM)技術(shù)相結(jié)合,構(gòu)建了以SVPWM信號(hào)驅(qū)動(dòng)功率器件的異步電機(jī)矢量控制調(diào)速系統(tǒng)結(jié)構(gòu)圖,并用Matlab軟件對(duì)該系統(tǒng)建模與仿真。仿真結(jié)果表明
2019-11-28 16:23:2612 本文對(duì)電機(jī)拖動(dòng)系統(tǒng)中控制策略進(jìn)行了研究,討論了基于數(shù)字信號(hào)處理器的異步電機(jī)矢量控制系統(tǒng),并詳細(xì)分析了系統(tǒng)硬件、軟件設(shè)計(jì)的重點(diǎn)首先介紹了基于磁場(chǎng)定向的矢量控制系統(tǒng)的設(shè)計(jì)原理及設(shè)計(jì)方法,敘述空間電壓矢量
2021-05-17 14:08:373 論文研究設(shè)計(jì)了異步電機(jī)間接性矢量控制系統(tǒng)。以電機(jī)控制專用芯片TMS320F2812為核心構(gòu)成控制電路,進(jìn)行電流的完全解耦,產(chǎn)生SVPWM波形。
2021-05-18 10:09:4212 使用MCU的DAC來觀測(cè)矢量控制FOC電機(jī)控制波形
2021-12-08 16:51:2119 異步、同步電機(jī)的模型、矢量控制
2022-07-04 14:56:583 導(dǎo)讀:本期主要介紹異步電機(jī)的全階磁鏈觀測(cè)器。從工作原理到帶入到矢量控制中,比較不同觀測(cè)器的估計(jì)效果對(duì)電機(jī)控制性能的影響大小。
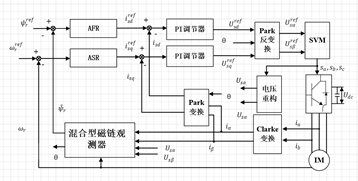
2022-11-08 09:34:323284 導(dǎo)讀:本期主要介紹電壓型磁鏈觀測(cè)器(voltage flux observer)在靜止坐標(biāo)系下的表現(xiàn)形式,應(yīng)用在異步電機(jī)矢量控制系統(tǒng)中。
2023-01-29 17:48:181177 前言:在前面梳理完電機(jī)數(shù)學(xué)模型和坐標(biāo)變換的知識(shí)后,下一步就是對(duì)矢量控制系統(tǒng)的建立,矢量控制系統(tǒng)重在于其思想框
架的理解以及異步電機(jī)獨(dú)有多種磁場(chǎng)定向方案之間的區(qū)別,這兩個(gè)問題都是值得獨(dú)立探究的,按照順序來。
2023-03-27 11:16:084 前面的三篇文章已將理論部分基本分析完了,下階段就是對(duì)異步電機(jī)的矢量控制仿真模型進(jìn)行搭建,結(jié)合前面梳理的理論知識(shí)看看矢量控制是不是那回事兒,能不能夠?qū)崿F(xiàn)這個(gè)轉(zhuǎn)矩、電流和轉(zhuǎn)
速三個(gè)指標(biāo)的控制,另外,驗(yàn)證第三篇磁場(chǎng)定向中轉(zhuǎn)子磁鏈觀測(cè)器是否能夠?qū)崿F(xiàn)磁鏈觀測(cè)呢?
2023-03-27 11:22:500 先放下我做的完整異步電機(jī)矢量控制系列仿真框圖。異步電機(jī)的控制相比較于PMSM是更難的,我是從異步電機(jī)著手的,由難入簡(jiǎn),降維打擊- -
我在做仿真前是每個(gè)小的仿真分開做的,在各個(gè)仿真完成后我把所有
2023-03-29 10:33:282 導(dǎo)讀:本期主要是介紹模型預(yù)測(cè)電流控制。模型預(yù)測(cè)電流控制主要包括:轉(zhuǎn)速環(huán)、磁鏈環(huán)、磁鏈觀測(cè)器、預(yù)測(cè)模型和 代價(jià)函數(shù)。
異步電機(jī)模型預(yù)測(cè)電流控制系統(tǒng)的結(jié)構(gòu)框圖如圖1所示。該控制系統(tǒng)與傳統(tǒng)的FOC
2023-03-29 10:14:531 異步電機(jī)控制筆記 本筆記討論異步電機(jī)的控制算法。先對(duì)異步電機(jī)在ABC坐標(biāo)系以及DQ0坐標(biāo)系下的電壓方程與磁鏈方程進(jìn)行推導(dǎo),然后對(duì)常用的旋轉(zhuǎn)坐標(biāo)系下的異步電機(jī)模型進(jìn)行了分析。 為了實(shí)現(xiàn)異步電機(jī)的矢量控制
2023-03-29 11:40:502 異步電機(jī)的控制方法可以劃分為矢量控制與標(biāo)量控制。
在標(biāo)量控制中,僅對(duì)電壓、電流、以及磁鏈等矢量的幅值和旋轉(zhuǎn)頻率進(jìn)行控制,如恒壓頻比(VF)控制技術(shù)。
在矢量控制中,將矢量的瞬時(shí)位置納入控制范疇,如矢量控制(F0C)、直接轉(zhuǎn)矩控制(DTC)、模型預(yù)測(cè)控制(MPC) 等高性能控制方
法。
2023-03-29 11:41:271 導(dǎo)讀:本期文章主要介紹異步電機(jī)無速度傳感器矢量控制。首先分析無速度傳感器的優(yōu)勢(shì),然后分次介紹不同的速度估計(jì)方法,最后進(jìn)行MATLAB/Simulink仿真模型搭建,驗(yàn)證方法的可行性和有效性。 如果
2023-03-29 11:42:460 異步電機(jī)按定子磁場(chǎng)定向的矢量控制克服了按轉(zhuǎn)子磁場(chǎng)定向的矢量控制系統(tǒng)對(duì)轉(zhuǎn)子參數(shù)的依賴性,又沒有直接轉(zhuǎn)矩控制帶來的轉(zhuǎn)矩脈動(dòng)。本文在矢量控制和直接轉(zhuǎn)矩控制的基礎(chǔ)上,取長(zhǎng)補(bǔ)短,提出一種
感應(yīng)電動(dòng)機(jī)按定子
2023-03-29 11:27:140 導(dǎo)讀:本期文章主要介紹異步電機(jī)無差拍電流預(yù)測(cè)矢量控制,與傳統(tǒng)的異步電機(jī)PI調(diào)節(jié)的矢量控制作對(duì)比。傳統(tǒng)的異步電機(jī)矢量控制的參考電壓獲取是通過兩個(gè)PI電流內(nèi)環(huán)獲取的,其數(shù)學(xué)表達(dá)式如式(1)所示
2023-03-29 09:40:120 至于什么時(shí)異步電機(jī)矢量控制系統(tǒng),這里就不贅述了。可以參考陳伯時(shí)教授的《運(yùn)動(dòng)控制系統(tǒng)》,講的很詳細(xì)。涉及到許多概念,包括何為坐標(biāo)變換,以及dq坐標(biāo)系下異步電機(jī)方程,間接矢量控
制之類。這些都是最最
2023-03-29 10:21:492 在鼠籠式異步電機(jī)中,轉(zhuǎn)子機(jī)械轉(zhuǎn)速略小于旋轉(zhuǎn)磁場(chǎng)的轉(zhuǎn)速。兩者之間角速度的差異稱作轉(zhuǎn)差率,并以旋轉(zhuǎn)磁通速度的百分
比來表示。
例如,如果轉(zhuǎn)子轉(zhuǎn)速和磁通旋轉(zhuǎn)速度相同,則轉(zhuǎn)差率為0:而當(dāng)轉(zhuǎn)子轉(zhuǎn)速
2023-03-29 09:32:370 針對(duì)異步電機(jī)單矢量模型預(yù)測(cè)轉(zhuǎn)矩控制(MPTC)存在的轉(zhuǎn)矩脈動(dòng)較大和開關(guān)頻率在整個(gè)速度域范圍內(nèi)不固定的問題,本期文章主要介紹一種基于廣義雙矢量的異步電機(jī)MPTC控制策略。
2023-03-30 10:24:071 本期主要介紹電壓型磁鏈觀測(cè)器(voltageflux observer)在靜止坐標(biāo)系下的表現(xiàn)形式,應(yīng)用在異步電機(jī)矢量控制系統(tǒng)中。
磁鏈估計(jì)是高性能交流感應(yīng)電機(jī)調(diào)速系統(tǒng)中的重要組成部分。而磁鏈在實(shí)際
2023-03-30 10:20:261 本期主要介紹電流型磁鏈觀測(cè)器(current flux observer)在不同坐標(biāo)系下的表現(xiàn)形式,應(yīng)用在異步電機(jī)矢量控制系統(tǒng)中。
磁鏈估計(jì)是高性能交流感應(yīng)電機(jī)調(diào)速系統(tǒng)中的重要組成部分
2023-03-30 09:59:430 文中的仿真模型,可關(guān)注微信公眾號(hào):淺談電機(jī)控制,獲取。 一、基于兩電平SVPWM發(fā)波的異步電機(jī)矢量控制 圖 1 基于兩電平SVPWM發(fā)波的異步電機(jī)矢量控制系統(tǒng)仿真(磁鏈開環(huán)) ? 圖2基于兩電平SVPW
2023-03-30 09:51:120 導(dǎo)讀: 本期主要介紹異步電機(jī)矢量控制在滯環(huán)CHBPWM調(diào)制和SVPWM調(diào)制下的控制性能對(duì)比。
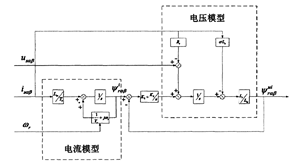
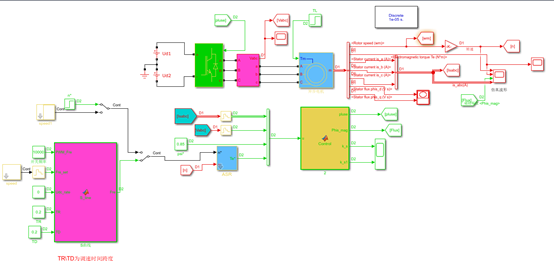
2023-04-06 10:04:56937 導(dǎo)讀:本期文章主要介紹異步電機(jī)速度估計(jì)的方法-混合模型磁鏈觀測(cè)器法。對(duì)該方法的原理進(jìn)行簡(jiǎn)單介紹和進(jìn)行仿真驗(yàn)證。
2023-05-18 09:43:14471 
仿真進(jìn)行的,接下來會(huì)嘗試進(jìn)行硬件平臺(tái)方面的設(shè)計(jì)和實(shí)現(xiàn)并結(jié)合現(xiàn)在工業(yè)中使用的FOC進(jìn)一步深化學(xué)習(xí)異步電機(jī)矢量控制。
2023-05-29 16:59:47723 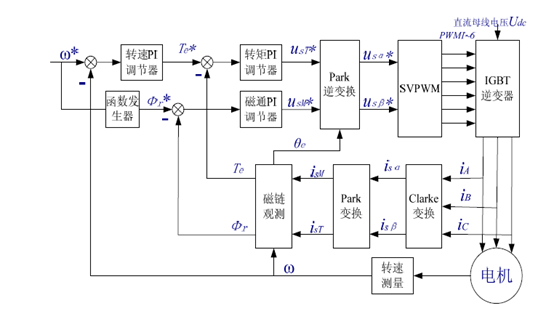
仿真進(jìn)行的,接下來會(huì)嘗試進(jìn)行硬件平臺(tái)方面的設(shè)計(jì)和實(shí)現(xiàn)并結(jié)合現(xiàn)在工業(yè)中使用的FOC進(jìn)一步深化學(xué)習(xí)異步電機(jī)矢量控制。
2023-05-29 17:00:031164 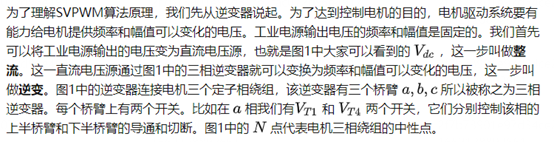
導(dǎo)讀:本期文章主要介紹異步電機(jī)的改進(jìn)型電壓模型磁鏈觀測(cè)器。傳統(tǒng)純積分形式的積分器在低速區(qū)域存在初始值問題和直流偏置問題,所以在實(shí)際應(yīng)用中必須對(duì)電壓模型進(jìn)行改進(jìn)。本期文章中的對(duì)電壓模型改進(jìn)是借鑒一篇IEEE中的方法。
2023-08-19 16:00:55614 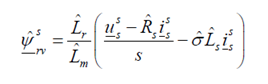
導(dǎo)讀:異步電機(jī)直接矢量控制需要通過磁鏈觀測(cè)器來獲取同步角,用于控制過程中的坐標(biāo)變換。
2023-11-09 11:24:10465 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論