 電子發(fā)燒友App
電子發(fā)燒友App


Q172DSCPU在汽車生產(chǎn)線中的應(yīng)用
該案例適用于各種生產(chǎn)線設(shè)備、壓入機(jī)、沖壓機(jī)、印刷機(jī)、立式成型充填封口機(jī)、臥式成型充填封口機(jī)等。
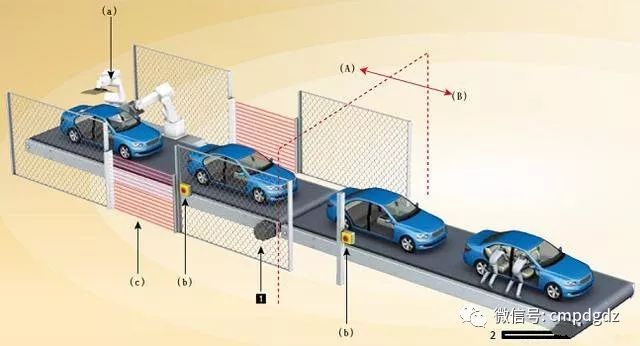
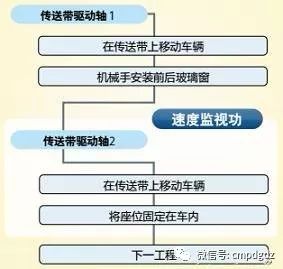
1 傳送帶驅(qū)動(dòng)軸1? 2 傳送帶驅(qū)動(dòng)軸2? (A) 玻璃窗安裝工程(無人)? (B) 安裝座位工程(有人)? (a) 玻璃窗安裝機(jī)械手? (b) 緊急停止按鈕? (c) 光幕 動(dòng)作流程
現(xiàn)場課題 課題01如有人進(jìn)入無人組裝生產(chǎn)線,會(huì)停止---解決課題:切斷功能。 課題02有人組裝生產(chǎn)線中,希望確保安全的速度---速度監(jiān)視功能。 模型系統(tǒng)
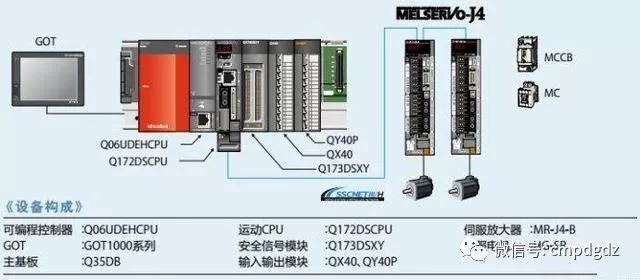
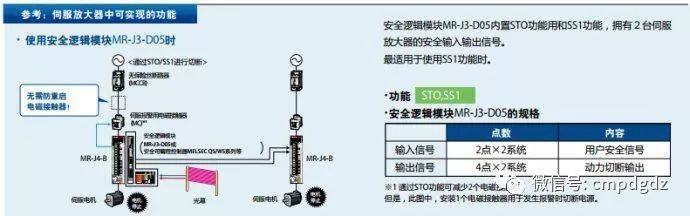
解決現(xiàn)場課題 解決01切斷功能:通過充實(shí)安全功能,構(gòu)建用途對應(yīng)的安全系統(tǒng)。
?
?
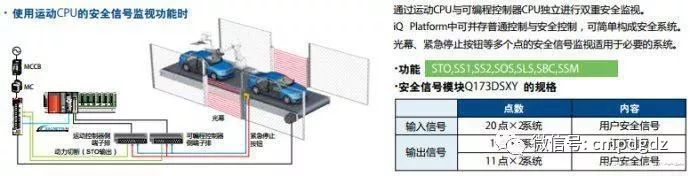
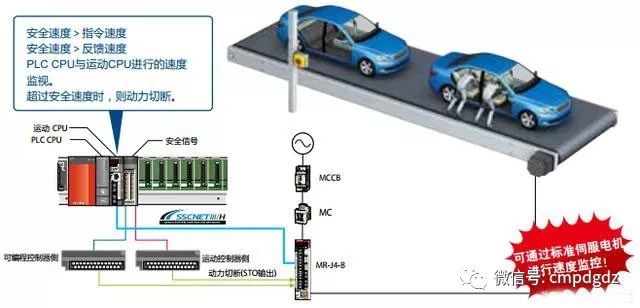
解決02速度監(jiān)控功能(SLS):通過速度監(jiān)視確保生產(chǎn)線的安全性。 速度監(jiān)視功能(SLS)是監(jiān)視電機(jī)速度是否超過安全速度的監(jiān)視功能。通過將指令速度與反饋速度與安全速度相比,保證安全速度。異常時(shí),通過STO或SS1切斷動(dòng)力。
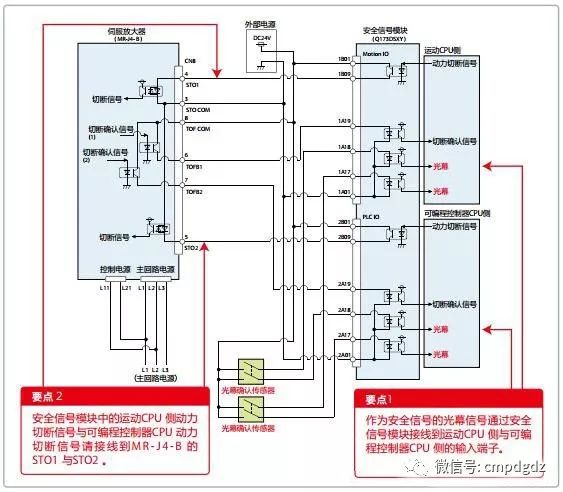
啟動(dòng)步驟 步驟1:安全信號的接線 使用安全信號模塊時(shí)的安全系統(tǒng)接線示例。光幕的信號連接到安全信號模塊的輸入端子,安全信號模塊的輸出端子連接到伺服放大器的STO端子。
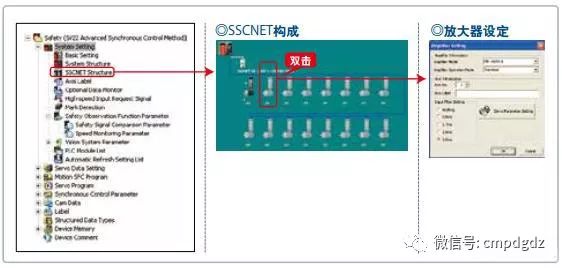
步驟2:系統(tǒng)構(gòu)成的設(shè)定 在系統(tǒng)構(gòu)成畫面中進(jìn)行伺服放大器、伺服電機(jī)的設(shè)定。
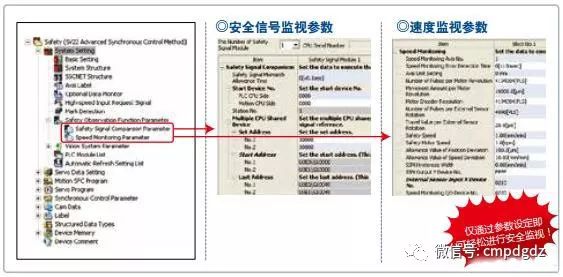
步驟3:安全監(jiān)視功能參數(shù)的設(shè)定 通過安全信號參數(shù)設(shè)定安全信號模塊的使用臺(tái)數(shù),通過速度監(jiān)視參數(shù)設(shè)定速度監(jiān)視軸編號及安全速度等。
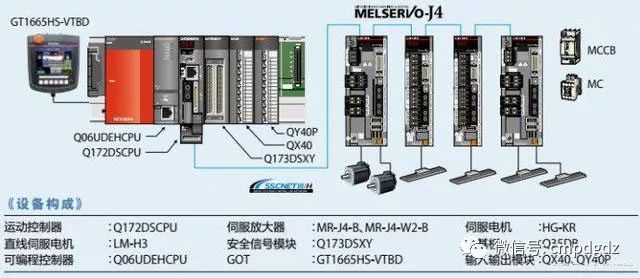
Q172DSCPU在搬運(yùn)設(shè)備中的應(yīng)用
該案例適用于通用材料的搬送設(shè)備、自動(dòng)組裝設(shè)備、封裝機(jī)、航空機(jī)組裝、掃描設(shè)備等。
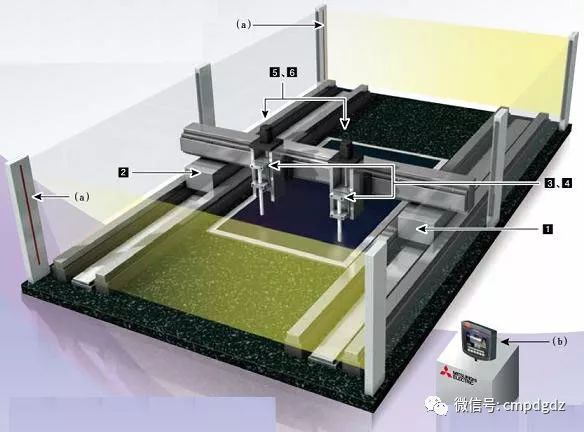
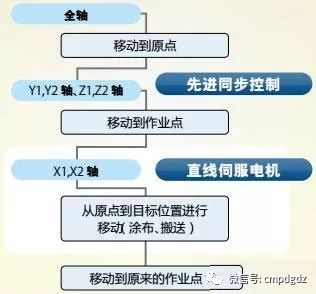
1 X1軸(直線伺服電機(jī))? 2 X2軸(直線伺服電機(jī))? 3 Y1軸(直線伺服電機(jī))? 4 Y2軸(直線伺服電機(jī))? 5 Z1軸(上下軸)? 6 Z2軸(上下軸) (a) 光幕? (b) GOT(Graphic Operation Terminal) 動(dòng)作流程
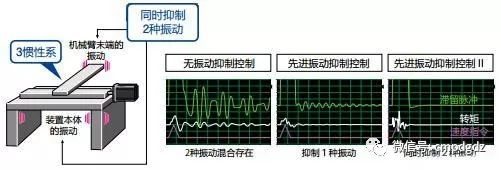
現(xiàn)場課題 課題01抑制機(jī)械的振動(dòng)---解決課題:先進(jìn)振動(dòng)抑制控制Ⅱ與機(jī)械共振抑制濾波器。 課題02以簡單構(gòu)造實(shí)行多傳感頭---解決課題:直線伺服電機(jī)。 課題03X1軸與X2軸總是進(jìn)行相同動(dòng)作----解決課題:串聯(lián)驅(qū)動(dòng)。
模型系統(tǒng)
解決現(xiàn)場課題 解決01先進(jìn)振動(dòng)抑制控制Ⅱ機(jī)械共振抑制濾波器:通過一鍵式操作,實(shí)現(xiàn)先進(jìn)的振動(dòng)抑制控制功能。完成伺服增益調(diào)整。 先進(jìn)振動(dòng)抑制控制Ⅱ:通過對應(yīng)3慣性系的機(jī)械的振動(dòng)抑制控制算法,可同時(shí)抑制2種低頻率振動(dòng)。通過MR Configurator2也可簡單進(jìn)行調(diào)整。可對機(jī)械臂頂端或設(shè)備主體殘留振動(dòng)的控制發(fā)揮出效果。
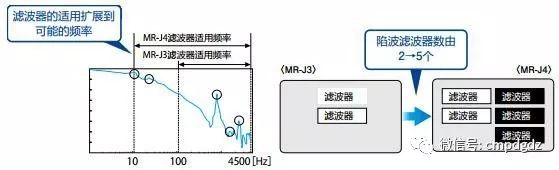
機(jī)械共振抑制濾波器:通過提高濾波器構(gòu)造,將適用頻率范圍由100Hz~4500H擴(kuò)展到10Hz~4500Hz。并且,將可同時(shí)適用的濾波器由2個(gè)擴(kuò)展到5個(gè),從而提高機(jī)械的振動(dòng)抑制性能。
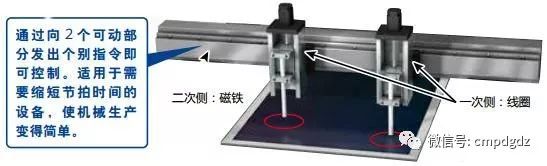
解決02直線伺服電機(jī):通過直線伺服電機(jī)可隨意控制多傳感頭! 可以使用支持最大速度3m/s(LM-H3系列)、最大推力150N~18000N、最小分解能0.005μm的多串行I/F編碼器相應(yīng)的直線伺服電機(jī)的多傳感頭。
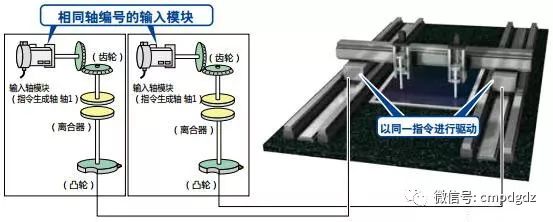
解決03 串聯(lián)驅(qū)動(dòng):通過先進(jìn)同步控制,簡單進(jìn)行串聯(lián)驅(qū)動(dòng)。 使用先進(jìn)同步控制,將相同數(shù)據(jù)輸出到凸輪,可實(shí)現(xiàn)并列驅(qū)動(dòng)(串聯(lián)驅(qū)動(dòng))。
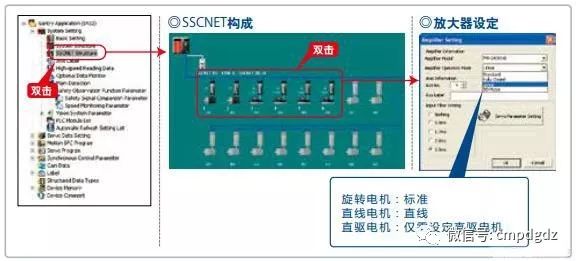
啟動(dòng)步驟 步驟1:系統(tǒng)構(gòu)成的設(shè)定 設(shè)定伺服放大器、伺服電機(jī)。
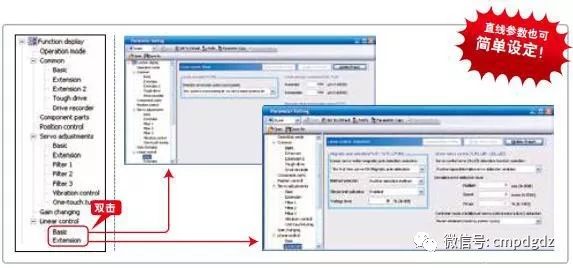
步驟2:直線控制參數(shù)的設(shè)定 直線伺服電機(jī)的參數(shù)也僅需設(shè)定2畫面的數(shù)據(jù)。
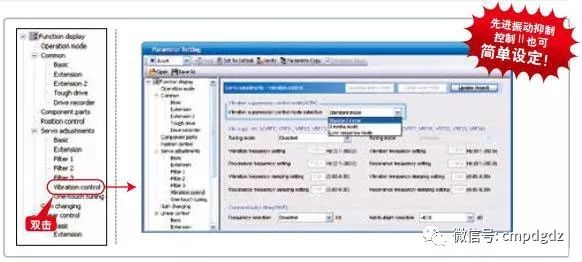
步驟3:振動(dòng)抑制控制參數(shù)的設(shè)定 將振動(dòng)抑制控制模式變?yōu)?慣性模式,使先進(jìn)振動(dòng)抑制控制Ⅱ有效。
步驟4:程序的編輯 作成運(yùn)動(dòng)SFC程序、伺服程序。

QD77MS4在螺絲擰緊機(jī)的應(yīng)用 ? 該案例適用于螺帽擰緊機(jī)、汽缸蓋加固機(jī)、離合器加固機(jī)、壓入機(jī)、鉚接機(jī)等設(shè)備。
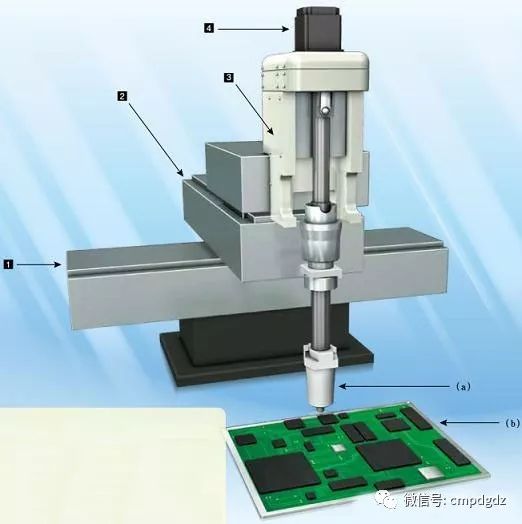
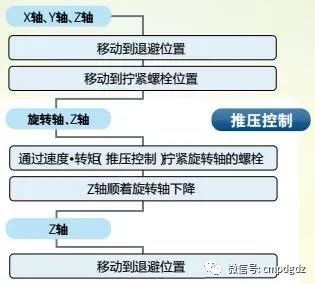
1 X軸? 2 Y軸? 3 上下軸(Z軸)? 4 旋轉(zhuǎn)軸? (a) 擰緊機(jī)? (b) 工件 動(dòng)作流程
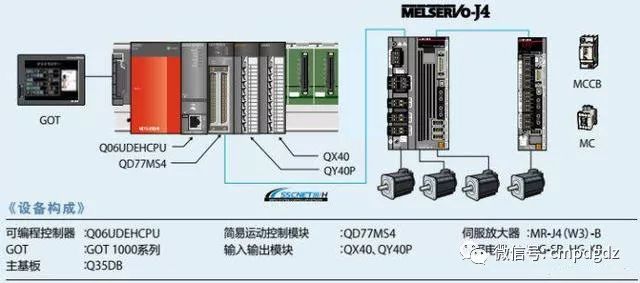
模型系統(tǒng)
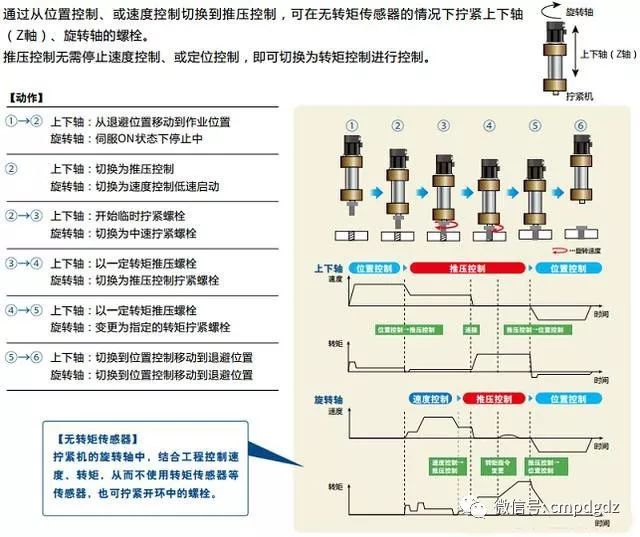
解決現(xiàn)場課題 解決01推壓控制:可擰緊開環(huán)中的螺栓。
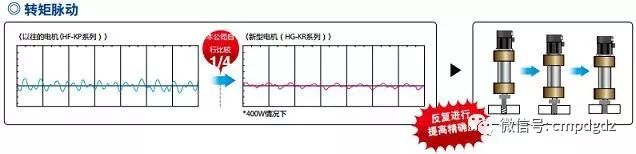
解決02減少通電轉(zhuǎn)矩波形:反復(fù)擰緊螺栓,提高精確度。 通過電機(jī)極數(shù)與插槽數(shù)最佳的組合,可大幅降低通電轉(zhuǎn)矩脈動(dòng)。 擰緊螺栓時(shí),反復(fù)進(jìn)行擰緊,可改善精確度。
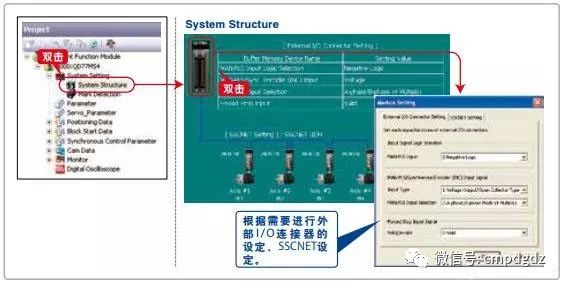
啟動(dòng)步驟 步驟1:系統(tǒng)構(gòu)成的設(shè)定 通過系統(tǒng)構(gòu)成進(jìn)行伺服放大器的設(shè)定。
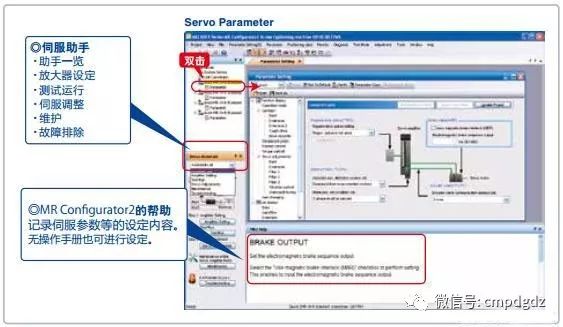
步驟2:進(jìn)行各軸的伺服放大器設(shè)定。使用伺服助手功能,即使第一次使用也可簡單進(jìn)行設(shè)定。
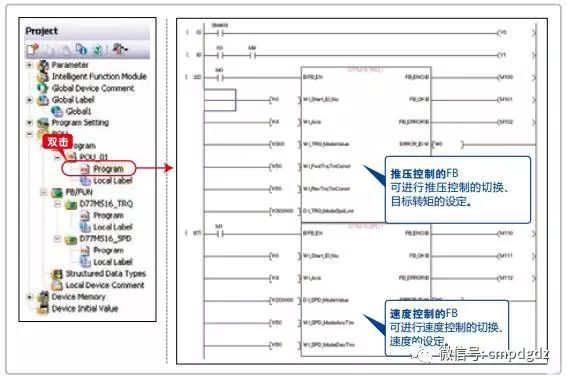
步驟3:推壓控制用順控程序的制作 通過功能塊(FB) 可簡單制作控制模式切換等的控制用程序。
QD77MS2在貼標(biāo)設(shè)備的應(yīng)用 ? 該案例適用于金屬?紙的切斷設(shè)備、添加折疊線設(shè)備、貼標(biāo)設(shè)備、打印機(jī)、掃描設(shè)備等。
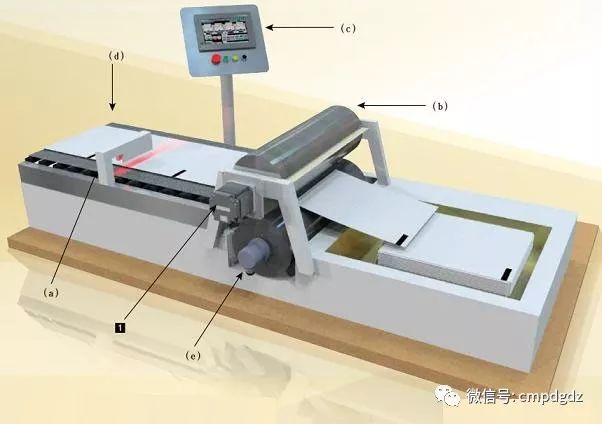
1 旋切刀具軸 (a) 色標(biāo)傳感器? (b) 旋切刀具? (c) GOT? (d) 傳送帶? (e) 同步編碼器 動(dòng)作流程
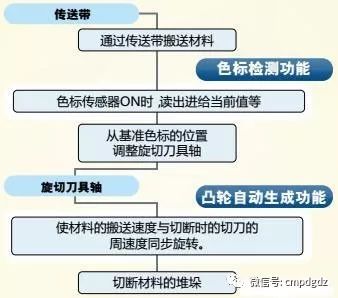
現(xiàn)場課題 課題01從GOT設(shè)定想要的紙張長度-—解決課題:凸輪自動(dòng)生成功能。 課題02根據(jù)基準(zhǔn)色標(biāo)位置切斷紙張—-解決課題:色標(biāo)檢測功能。 模型系統(tǒng)
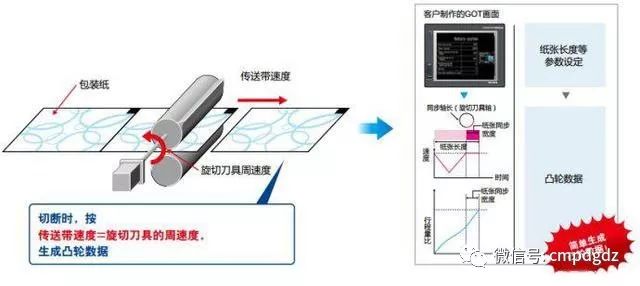
解決現(xiàn)場課題 解決01凸輪自動(dòng)生成功能:通過自動(dòng)生成凸輪數(shù)據(jù),削減設(shè)計(jì)工時(shí)! 根據(jù)包裝紙的紙張長度、旋切刀具軸直徑、紙張同步區(qū)間可生成凸輪數(shù)據(jù)。 通過自動(dòng)生成凸輪數(shù)據(jù),可削減設(shè)計(jì)工時(shí)。
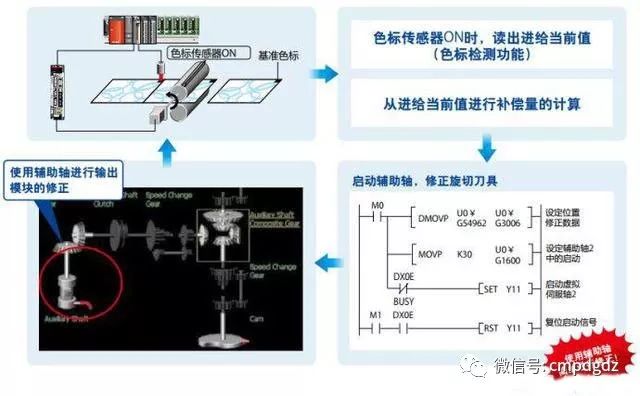
解決02色標(biāo)檢測功能:通過基準(zhǔn)色標(biāo)位置的檢測→進(jìn)行補(bǔ)償,使吻合基準(zhǔn)色標(biāo)進(jìn)行切斷! 根據(jù)紙張的彈性、送紙時(shí)的平滑度等檢出與基準(zhǔn)色標(biāo)位置的偏差。 通過調(diào)整與基準(zhǔn)位置的偏差,可配合基準(zhǔn)色標(biāo)進(jìn)行切斷。
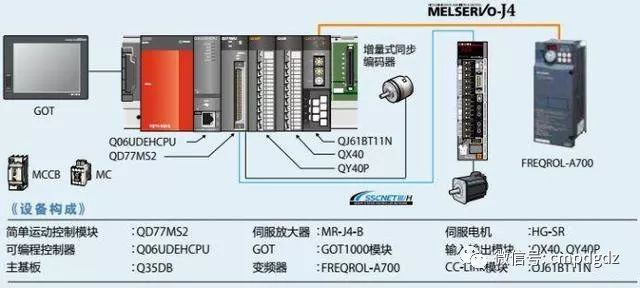
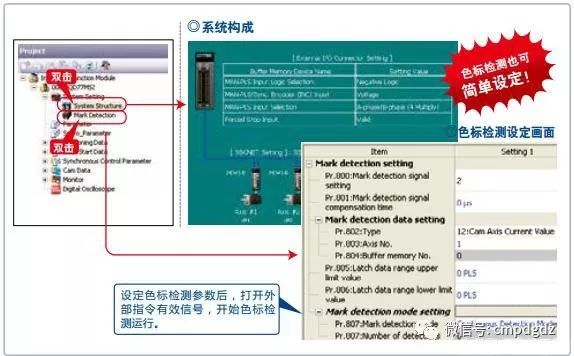
啟動(dòng)步驟 步驟1:系統(tǒng)構(gòu)成、色標(biāo)檢測的設(shè)定 進(jìn)行系統(tǒng)構(gòu)成、色標(biāo)檢測的設(shè)定。
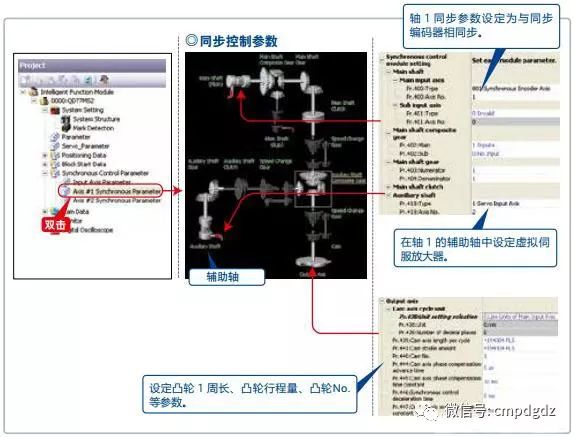
步驟2:同步控制參數(shù)設(shè)定 設(shè)定參數(shù),使旋切刀具(軸1)與傳送帶同步后進(jìn)行運(yùn)行。
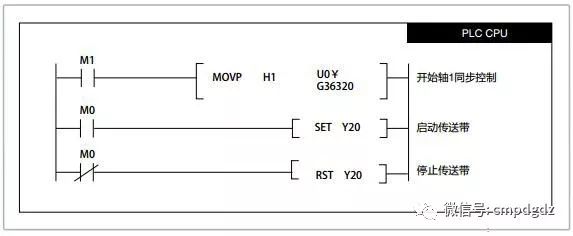
步驟3:順控程序與定位數(shù)據(jù)的生成 旋切刀具(軸1)同步開始后,啟動(dòng)驅(qū)動(dòng)傳送帶的變頻器。
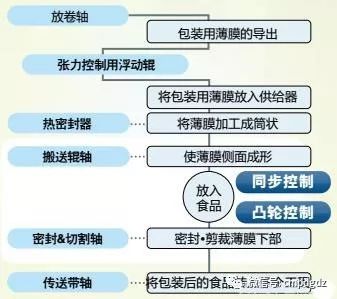
? QD77MS16在包裝機(jī)中的應(yīng)用 ? 該案例適用于食品?飲料填充機(jī)、袋包裝包裝機(jī)、粉末的填充機(jī)等。
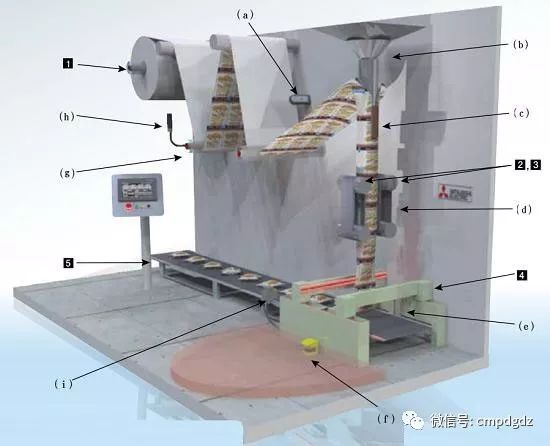
1 放卷軸? 2 搬送輥軸? 3 搬送輥軸? 4 密封&切割軸? 5 傳送帶軸 (a) 色標(biāo)傳感器? (b) 供給器? (c) 熱密封器? (d) 薄膜成型設(shè)備? (e) 密封&切割設(shè)備? (f) 安全用接近傳感器? (g) 張力控制用浮動(dòng)輥? (h) 輥幅檢測用傳感器 (i) 產(chǎn)品檢測用傳感器 動(dòng)作流程
現(xiàn)場課題 課題01搬送與密封&剪裁同時(shí)進(jìn)行,從而使包裝的品質(zhì)更加穩(wěn)定—-解決課題:簡單的同步控制。 課題02抑制機(jī)械的沖擊,縮短節(jié)拍時(shí)間—-解決課題:凸輪控制。 課題03構(gòu)建安全系統(tǒng)—-解決課題:安全監(jiān)視功能。 模型系統(tǒng)
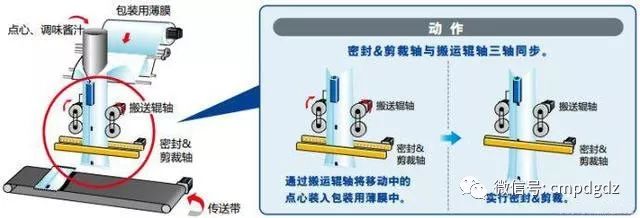
解決現(xiàn)場課題 解決01簡單的同步控制:通過同步控制實(shí)現(xiàn)高品質(zhì)完成! 通過搬送輥軸與密封&剪裁軸的三軸同步控制,可提高加工精度,實(shí)現(xiàn)高品質(zhì)完成。另外,無需聯(lián)鎖,從而縮短節(jié)拍時(shí)間。
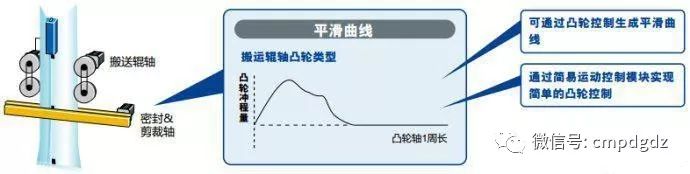
解決02凸輪控制:可順利進(jìn)行包裝用薄膜的搬送?停止! 通過凸輪控制,實(shí)現(xiàn)平滑搬送、停止的高速化,縮短節(jié)拍時(shí)間。
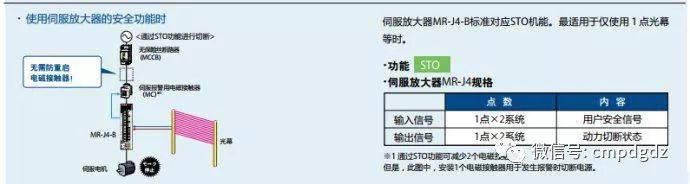
解決03安全監(jiān)視功能:標(biāo)準(zhǔn)支持IEC/EN 61800-5-2的功能。 伺服放大器MR-J4-B系列標(biāo)準(zhǔn)支持安全監(jiān)控功能STO(Safe Torque Off) ,可在不切斷主回路電源的前提下安全停止,縮短重啟時(shí)間。

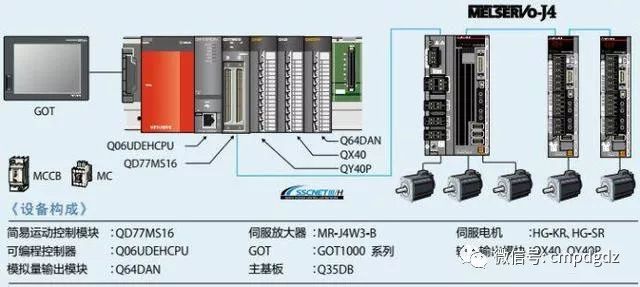
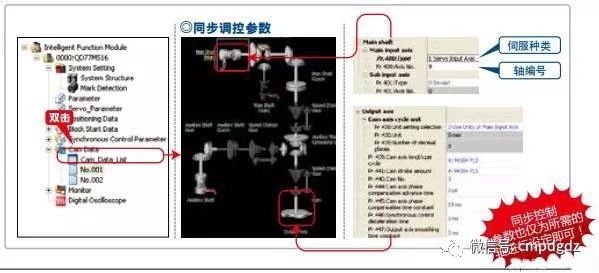
啟動(dòng)步驟 步驟1:系統(tǒng)構(gòu)成的設(shè)定 設(shè)定伺服放大器、虛擬伺服放大器。

步驟2:同步控制參數(shù)設(shè)定 軸2的參數(shù)設(shè)定為與虛擬伺服放大器(軸9)同步。
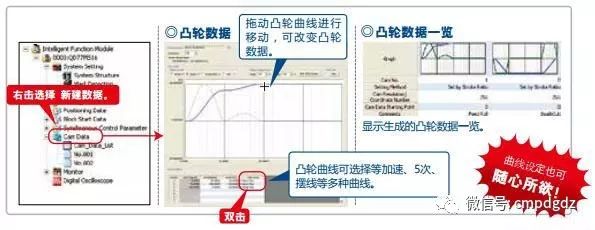
步驟3:凸輪數(shù)據(jù)的生成 生成搬送輥軸、密封&剪裁軸的凸輪數(shù)據(jù)。
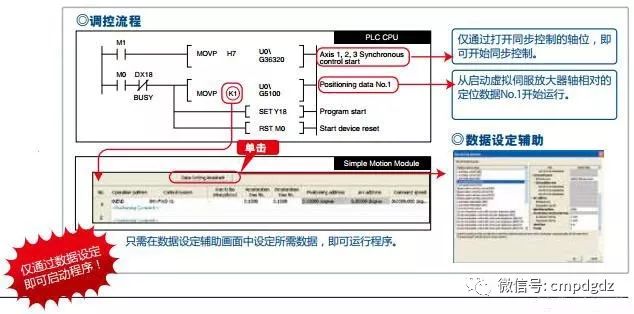
步驟4:順控程序與定位數(shù)據(jù)的生成 軸1~軸3為同步運(yùn)行運(yùn)作程序,軸9為開始定位程序。
編輯:黃飛
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論