 電子發(fā)燒友App
電子發(fā)燒友App


PID全稱是Proportion Integration Differentiation,即比例積分微分。
PID控制是最早發(fā)展起來的控制方法之一,此控制方法與自動化儀表的配合,可以大大減少人工,提升生產(chǎn)過程的自動化水平。由于PID控制算法簡單、適用性廣和可靠性高,已經(jīng)成為現(xiàn)代工業(yè)過程中不可或缺的控制手段。
S7-200 SMART支持PID控制。以下介紹利用PID向?qū)Э焖俳⒁粋€PID控制程序的方法。
? ? ? ? ? ? 前提條件
輸入輸出儀表信號均是4~20mA;
? ? ? ? ? ? 操作步驟
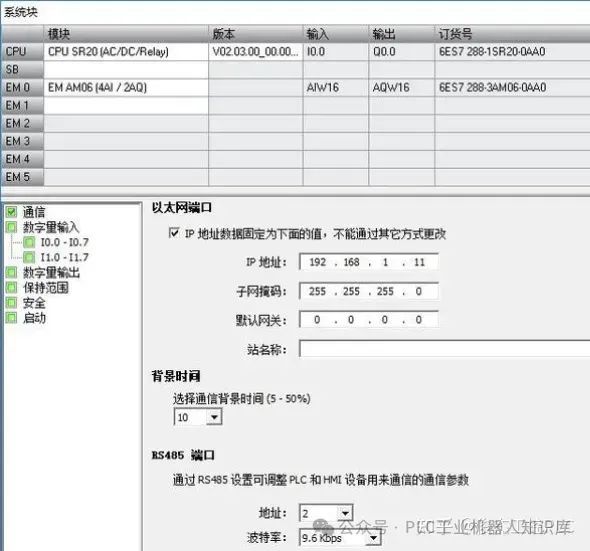
1. 打開STEP 7Micro/WIN SMART,新建硬件,并對EM AM06模塊通道類型進行設(shè)置(電流型);
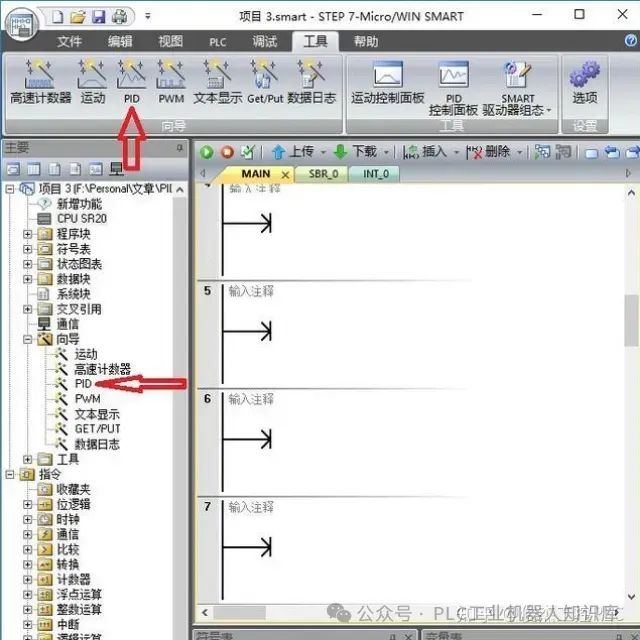
2.?點擊菜單欄工具-PID或者點擊左側(cè)樹形導(dǎo)航欄-向?qū)?PID;
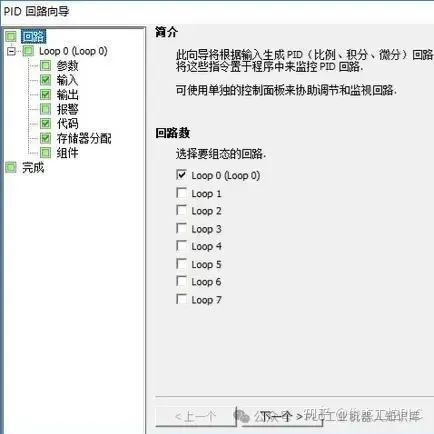
3. 一臺200Smart PLC可組態(tài)8個控制回路,按需要進行勾選。在此勾選loop 0,然后點擊“下一個”;
4. 回路命名,按需更改,,此處為默認(rèn),點擊“下一個”;
5.PID參數(shù)設(shè)置,在此暫不做更改,點擊“下一個”;
6.輸入類型設(shè)定,在此選擇“單極20%偏移量”。
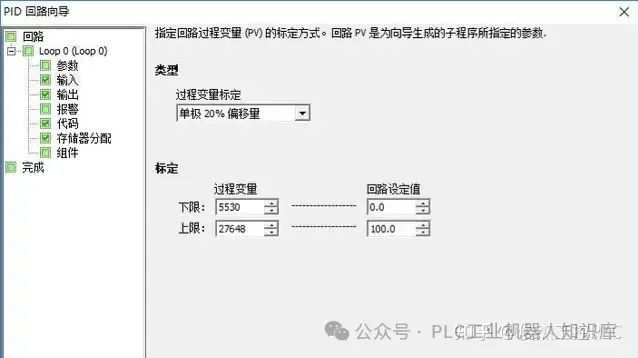
所謂“單極20%偏移量”,可以理解為接收的是4~20mA的信號。因為在Smart200PLC中,默認(rèn)接收的電流信號是0~20mA的(PLC接收到的int類型數(shù)據(jù)的范圍是0~27648),這一點在組態(tài)模擬量通道的時候就可以看到,但是現(xiàn)在的自動化儀表大部分是4~20mA的(接收到的int類型數(shù)據(jù)的范圍是5530~27648),也就是說,接收到的信號的下限需要進行20%的偏移,即0mA變?yōu)?0mA*20%=4mA,數(shù)據(jù)范圍下限0變?yōu)?7648*20%=5529.6≈5530,這就是“20%”偏移的含義。
對應(yīng)的回路設(shè)定值若沒有特殊要求就用默認(rèn)數(shù)據(jù)即可,點擊“下一個”;
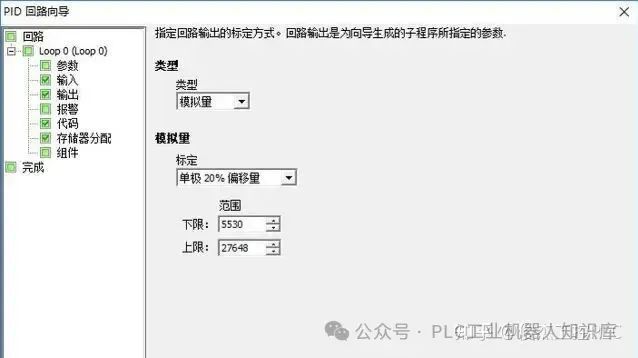
7.回路輸出設(shè)置。選擇“模擬量”標(biāo)定為“單極20%偏移量”,即輸出信號的int數(shù)據(jù)范圍也是5530~27648,對應(yīng)電流為4~20mA,點擊“下一個”;
8. 報警設(shè)置,如無需要不需設(shè)置,點擊“下一個”;
9.是否需要對回路進行手動控制,若勾選,則該控制回路可在手動模式與自動模式間切換,在此勾選“添加PID的手動控制”,點擊“下一個”;
10.分配存儲器,此步驟為自動分配120個字節(jié)的地址范圍,填入合適的起始地址即可,注意,這120個字節(jié)為該PID回路專用,不可再分配給其他數(shù)據(jù),在此選擇VB100~VB219。點擊“下一個”;
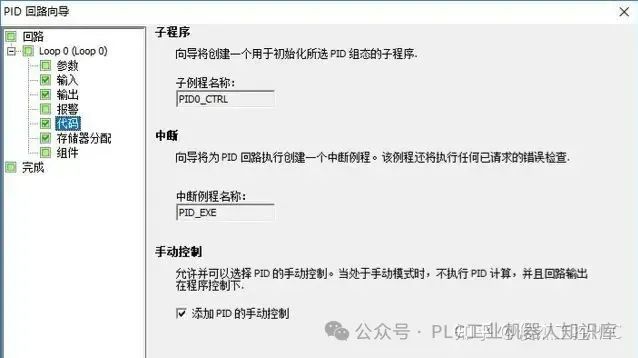
11. 介紹包含組件,點擊“下一個”;
12. 點擊“生成”,至此一個PID子例程建立完畢;
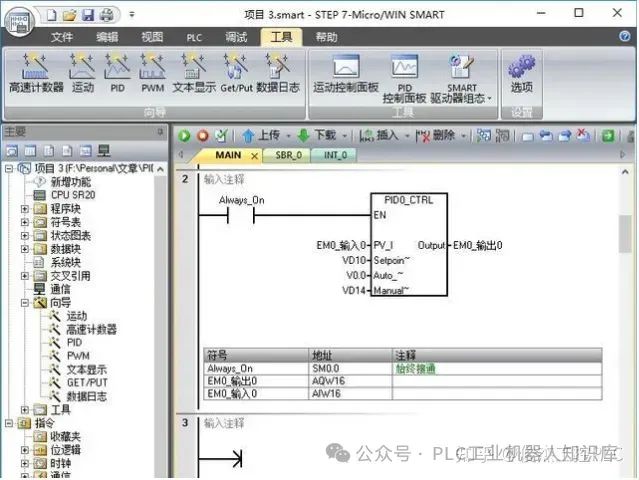
13. 確定PID回路各參數(shù)。V0.0為手動自動切換開關(guān),第一個AI通道(EM0_輸入0)為過程量PV_I,第一個AO通道(EM0_輸出0)為回路輸出,VD10為設(shè)定值SetPoint,VD14為手動輸出值ManualOutput;
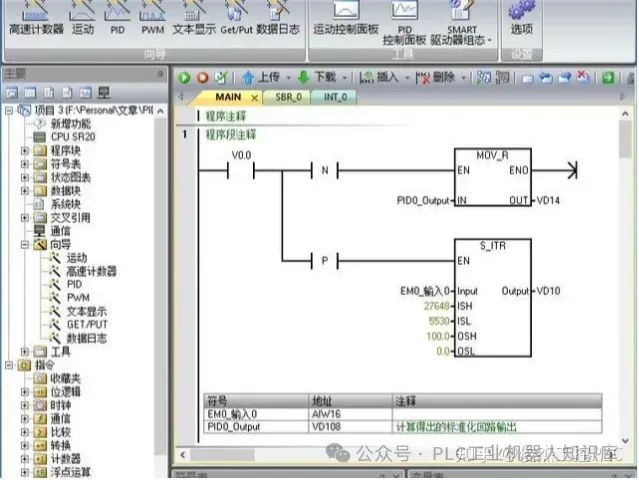
14. PID控制回路的無擾切換。200Smart的PID控制回路需要進行無擾切換編程,即PID控制模塊在進行手動/自動模式切換時,輸出需要進行保持,否則會因為手動輸出值ManualOutput(自動切手動)或自動設(shè)定值SetPoint(手動切自動)而引起輸出的變化,從而影響本來已經(jīng)穩(wěn)定的生產(chǎn)過程,擾亂正常的生產(chǎn)流程。
無擾切換核心思路是:由當(dāng)自動模式切為手動模式的瞬間,將當(dāng)前輸出值賦給手動輸出值ManualOutput;當(dāng)由手動模式切為自動模式的瞬間,將當(dāng)前過程值PV_I賦給自動設(shè)定值SetPoint;通過以上做法,可以保證在模式切換時,輸出基本不發(fā)生變化。
梯形圖如下:
15.在梯形圖中調(diào)用子例程“PID0_CTRL”;
PIDx_CTRL模塊各個參數(shù)的意義及范圍:
PV_I——即過程量,為int類型數(shù)據(jù);
Setpoint_R——即設(shè)定值,為real類型數(shù)據(jù),范圍0.0~100.0;
Auto_Manual——即手自動切換開關(guān),bool類型數(shù)據(jù);
ManualOutput——即手動輸出值,為real類型數(shù)據(jù),可在手動模式控制回路輸出;范圍0.0~1.0;
Output:即回路輸出,為int類型數(shù)據(jù);
注意:無擾切換步驟中的PID0_Output并不是PID0_CTRL模塊的輸出 EM0_輸出0,二者的數(shù)據(jù)類型也是不同的,具體可參考幫助文件中的“PID 回路定義表”。? ?
至此,一個PID控制回路搭建完成。下一步按實際工況調(diào)試回路,確定最佳的PID參數(shù),最終目的是PID回路可根據(jù)內(nèi)部計算控制輸出變化,從而快速準(zhǔn)確的將當(dāng)前過程量調(diào)整到設(shè)定值。
審核編輯:黃飛
?









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論