 電子發(fā)燒友App
電子發(fā)燒友App


1 引言
隨著電力電子技術(shù)、自動(dòng)控制技術(shù)、計(jì)算機(jī)技術(shù)的飛速發(fā)展,各類低壓變頻器的控制功能和控制技術(shù)性能得到了快速提升,相應(yīng)地帶來(lái)了變頻器的各種控制功能和大量名目繁多的相關(guān)控制參數(shù),參數(shù)的選擇與參數(shù)的設(shè)置就顯得相當(dāng)?shù)闹匾蛷?fù)雜。那么,如何從應(yīng)用場(chǎng)合需求的角度來(lái)選擇控制方式并正確的設(shè)置相關(guān)參數(shù),就不再是建立在對(duì)參數(shù)的孤立記憶與理解之上了,而是要求技術(shù)人員有全面的系統(tǒng)分析與解決實(shí)際問題的能力。
通常,面對(duì)一個(gè)特定的變頻器應(yīng)用場(chǎng)合,應(yīng)按照:提出問題→分析問題→解決問題的思路進(jìn)行,為此,首先要將應(yīng)用需求和實(shí)際工礦環(huán)境信息、數(shù)據(jù)加以收集、整理(這實(shí)際上就是提出問題),避免實(shí)際需求功能的重復(fù)和遺漏,需求功能的遺漏會(huì)最終造成無(wú)法完整地實(shí)現(xiàn)目標(biāo),而需求功能的重復(fù)是一種表象,容易導(dǎo)入混亂,需要技術(shù)人員從功能性特征的角度去加以歸并;其次,將這些需求歸類為對(duì)變頻器功能指標(biāo)的具體需求(這就是分析問題),這時(shí)還不需要考慮這些歸類后的需求到底要依靠哪個(gè)或哪些具體參數(shù)功能,而只需要考慮需求歸類的完整性、合理性與可行性,盡量減少需求歸類后各個(gè)功能需求中交叉現(xiàn)場(chǎng)的出現(xiàn);最后,將歸類后的功能需求逐個(gè)分解為對(duì)變頻器某些特定的、具體的參數(shù)的設(shè)置需求(這就是解決問題),即按這些需求去尋找具體的參數(shù)功能,這樣當(dāng)你在選擇變頻器時(shí)就能很快判斷該變頻器的選擇是否能滿足總體需求,而進(jìn)一步知道該在這個(gè)變頻器上設(shè)置哪些具體的參數(shù)。
本文將從控制功能需求分析角度出發(fā),力求通過對(duì)不同功能的需求分析,介紹如何來(lái)選擇控制方式、控制參數(shù)以及這些參數(shù)的功能設(shè)定。主要從提出問題、分析問題的角度進(jìn)行設(shè)計(jì)方案規(guī)劃闡述,以期能夠獲得一些應(yīng)用啟發(fā),與大家商榷。
2 基本參數(shù)功能介紹
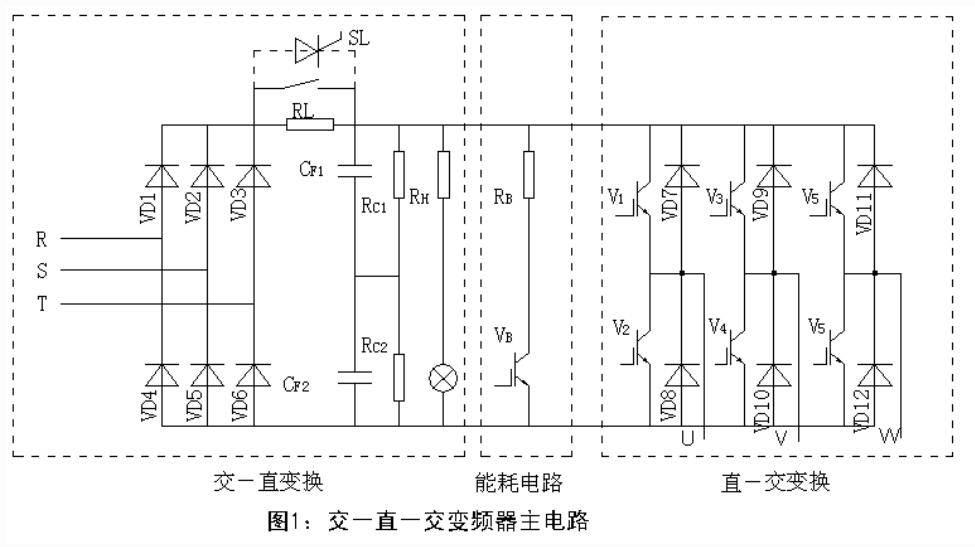
變頻器的變頻、變壓調(diào)節(jié)功能(也稱v/f特性)是其區(qū)別于其它電子設(shè)備的根本性特征,因此,頻率、電壓等相關(guān)參數(shù)是每個(gè)變頻器最基本的參數(shù),撇開各自名稱的不同,其主要的基本參數(shù)如下:
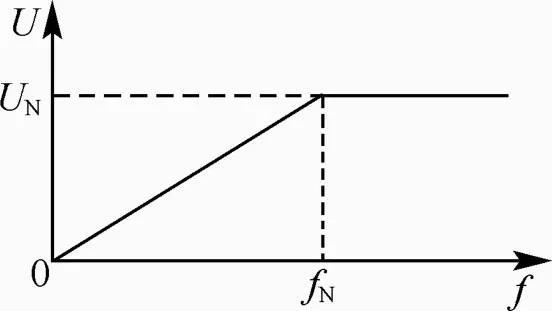
(1)基本頻率
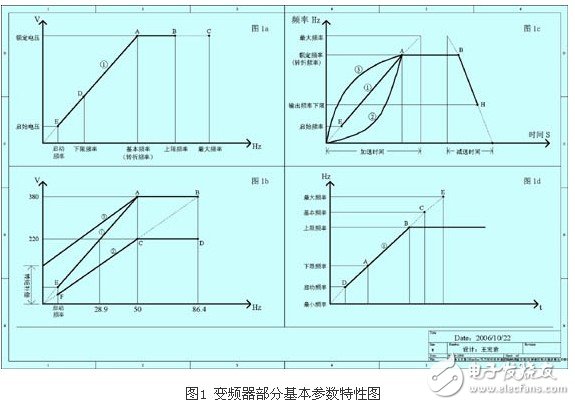
是指變頻器輸出額定電壓時(shí)所對(duì)應(yīng)的頻率值,有時(shí)也稱為額定頻率。通常按照?qǐng)D1(a)所示的設(shè)置就可以滿足v/f特性需求,即將電機(jī)的額定數(shù)據(jù)(額定電壓380v、額定頻率50hz)作為該參數(shù)的值,這時(shí)斜線①的斜率k=380/50=7.6,它的v/f關(guān)系相當(dāng)于直線方程v=7.6f。但也有例外,比如:當(dāng)我們?cè)噲D使用一個(gè)變頻器去驅(qū)動(dòng)1臺(tái)3相50hz ac220v的電機(jī)時(shí),就需要按圖1(b)中的斜線②來(lái)設(shè)置而不能再按斜線①設(shè)置參數(shù)。
(2)轉(zhuǎn)折頻率
是指變頻器在該轉(zhuǎn)折點(diǎn)的輸出電壓已經(jīng)達(dá)到額定電壓參數(shù)所設(shè)置的電壓數(shù)值,在這點(diǎn)以后的輸出頻率運(yùn)行段都不再增加其輸出電壓,即輸出電壓將維持在這個(gè)電壓值不變。在圖1(b)中,對(duì)于斜線①來(lái)說(shuō),其v/f的轉(zhuǎn)折頻率點(diǎn)是a點(diǎn);對(duì)于斜線②來(lái)說(shuō),其v/f的轉(zhuǎn)折頻率點(diǎn)是c點(diǎn)。通常,我們將轉(zhuǎn)折頻率值設(shè)置與基本頻率值相同,以便在變頻器輸出頻率達(dá)到基本頻率后,使變頻器的輸出電壓維持在額定電壓不變。如圖1(a)所示。
(3)啟動(dòng)頻率
是指變頻器開始有電壓輸出時(shí)所對(duì)應(yīng)的頻率。在變頻器啟動(dòng)過程中,當(dāng)變頻器的輸出頻率還沒達(dá)到啟動(dòng)頻率設(shè)定值時(shí),變頻器就不會(huì)輸出電壓。通常,為確保電機(jī)的啟動(dòng)轉(zhuǎn)矩,可通過設(shè)定合適的啟動(dòng)頻率來(lái)實(shí)現(xiàn)。
(4)上下限頻率
上限頻率、下限頻率有時(shí)也被分別稱為輸出頻率上限、輸出頻率下限。顧名思義,這個(gè)參數(shù)是對(duì)變頻器運(yùn)行時(shí)輸出頻率的一種限制。需要注意的是,在變頻器啟動(dòng)過程中,輸出頻率下限是不起作用的。例如:在圖1(a)中當(dāng)變頻器正處于從e點(diǎn)到a點(diǎn)的啟動(dòng)過程中時(shí),盡管設(shè)置了輸出頻率下限d點(diǎn),但ed段仍然有頻率和電壓輸出。只有當(dāng)變頻器已經(jīng)在da段運(yùn)行時(shí),就再也不能進(jìn)入de段運(yùn)行了。在圖1(c)中的h點(diǎn)就更直觀地反映了這種情況。輸出頻率上限值的設(shè)定將使變頻器的實(shí)際運(yùn)行頻率輸出值永遠(yuǎn)小于該設(shè)定值,哪怕是給定頻率值超越了上限輸出頻率,變頻器也不會(huì)出現(xiàn)實(shí)際輸出頻率超越上限輸出頻率限制的情況。通常情況下,我們?cè)O(shè)定“上限輸出頻率值≥額定頻率值”,如圖1(a)所示,這樣就可以實(shí)現(xiàn)電機(jī)在超越額定速度的狀態(tài)下運(yùn)行。但,在圖1(d)中卻發(fā)現(xiàn)了“上限輸出頻率值≤額定頻率值”的相反情況。那么,在什么情形下才要這樣的參數(shù)設(shè)置應(yīng)用呢?例如:對(duì)于一個(gè)輕負(fù)載和低啟動(dòng)轉(zhuǎn)矩的“小馬拉大車”變轉(zhuǎn)矩負(fù)載應(yīng)用系統(tǒng)或者對(duì)于揚(yáng)程、流量等有輸出限定的節(jié)能控制應(yīng)用場(chǎng)合。對(duì)于前者,只要“小馬”(變頻器標(biāo)稱額定輸出功率小于電機(jī)的額定功率)能夠讓電機(jī)得以順利啟動(dòng),那么,就可以通過這種方法來(lái)使電機(jī)始終運(yùn)行在其輸出功率小于等于變頻器標(biāo)稱額定功率范圍內(nèi),從而達(dá)到“小馬拉大車”的應(yīng)用實(shí)現(xiàn)。對(duì)于后者,可以作為“1+1≤1”的節(jié)能優(yōu)化控制判斷點(diǎn)(控制器通過對(duì)上限輸出頻率到達(dá)點(diǎn)的判斷,來(lái)決定此時(shí)是選擇繼續(xù)以單臺(tái)泵提升輸出頻率方式變頻運(yùn)行,還是以2臺(tái)泵同時(shí)變頻運(yùn)行),假定:有這樣的2套完全一樣的水泵電機(jī),其電機(jī)額定功率為45kw,水泵額定流量320m3/h。若當(dāng)前系統(tǒng)實(shí)際僅需要流量256m3/h,那么只需要1套水泵電機(jī)以40hz的頻率運(yùn)行就可以滿足需求,此時(shí),電機(jī)實(shí)際消耗功率約需要24kw。若此時(shí)系統(tǒng)實(shí)際需求流量需要增加到305m3/h時(shí),那么該電機(jī)必須以約48hz的頻率運(yùn)行來(lái)滿足此時(shí)的流量需求,那么,此時(shí)該電機(jī)實(shí)際消耗功率約為40kw。現(xiàn)在讓我們同樣在系統(tǒng)實(shí)際需求流量為305m3/h時(shí),改變僅1#泵變頻運(yùn)行的這種習(xí)慣,讓系統(tǒng)在需求流量大于288m3/h時(shí)就轉(zhuǎn)換為2套電機(jī)水泵系統(tǒng)同時(shí)變頻運(yùn)行狀態(tài),為了同樣達(dá)到305m3/h的實(shí)際系統(tǒng)流量需求,那么2套電機(jī)水泵系統(tǒng)就必須同時(shí)按輸出頻率約24hz的頻率運(yùn)行,那么,此時(shí)2套水泵電機(jī)各自僅需要消耗約6kw的輸出功率,即累計(jì)消耗功率小于12kw。可見此時(shí)2套泵同時(shí)變頻運(yùn)行要遠(yuǎn)比單套水泵電機(jī)運(yùn)行時(shí)所消耗的功率40kw要小很多。此就是“1+1≤1”的節(jié)能優(yōu)化運(yùn)行控制。關(guān)于詳細(xì)的功率計(jì)算對(duì)比,請(qǐng)參閱本人發(fā)表在2005年05月的《變頻器世界》的“中央空調(diào)系統(tǒng)變頻節(jié)能改造控制技術(shù)的分析與實(shí)現(xiàn)”一文相關(guān)章節(jié)的內(nèi)容。
除以上幾個(gè)與頻率相關(guān)的基本參數(shù)外,還有一個(gè)最大、最小頻率的概念,它是對(duì)應(yīng)最大、最小頻率給定值的一個(gè)范疇參數(shù),通常我們將以上幾個(gè)頻率參數(shù)都設(shè)定在這兩個(gè)參數(shù)的范圍內(nèi),如圖1(d)所示。
(5)轉(zhuǎn)矩補(bǔ)償
變頻器將電機(jī)在一定時(shí)間內(nèi)從靜止?fàn)顟B(tài)驅(qū)動(dòng)到一定的運(yùn)轉(zhuǎn)速度,需要克服機(jī)械裝置的靜態(tài)轉(zhuǎn)矩阻力和運(yùn)行加速度轉(zhuǎn)矩阻力。由于電機(jī)在低速時(shí)激磁電壓降低,為此,需要補(bǔ)償電機(jī)的欠激磁狀態(tài),使電機(jī)低速運(yùn)行時(shí)轉(zhuǎn)矩增強(qiáng)(v/f特性增強(qiáng),也即v/f在低頻段的斜率增大),以此來(lái)克服這2種轉(zhuǎn)矩阻力。圖1(b)中的斜線③是對(duì)斜線①的轉(zhuǎn)矩補(bǔ)償作用后的結(jié)果。需要指出,轉(zhuǎn)矩補(bǔ)償值較大時(shí),容易導(dǎo)致低速時(shí)電機(jī)發(fā)生過激磁狀態(tài),按這種狀態(tài)連續(xù)運(yùn)行時(shí),電機(jī)可能會(huì)發(fā)生快速發(fā)熱現(xiàn)象,危害電機(jī)的安全運(yùn)行;同時(shí),轉(zhuǎn)矩補(bǔ)償值過大時(shí),也容易產(chǎn)生啟動(dòng)階段過壓甚至過流故障發(fā)生。轉(zhuǎn)矩補(bǔ)償值的大小應(yīng)該以滿足電機(jī)啟動(dòng)需求的最小值為較好。
(6)加減速時(shí)間
變頻器加速時(shí)間、減速時(shí)間分別對(duì)應(yīng)電機(jī)在啟動(dòng)過程從0hz到最大輸出頻率所需要的時(shí)間、停止過程中從最大輸出頻率到0hz所需要的時(shí)間。如圖1(c)所示。加減速時(shí)間的大小將直接影響頻率給定躍變到實(shí)際最終輸出頻率響應(yīng)時(shí)間的長(zhǎng)短。對(duì)于諸如風(fēng)機(jī)類大慣量平方特性負(fù)載,時(shí)間值的過長(zhǎng)或過短都將容易引發(fā)變頻器在啟動(dòng)、停止過程中的過壓、過流故障的發(fā)生。需要在實(shí)際調(diào)試中通過不斷的啟停操作的嘗試來(lái)尋找合理的時(shí)間設(shè)定值。另外,與加減速時(shí)間相關(guān)的參數(shù)還有加減速曲線類型選擇問題,圖1(c)中的斜線①、斜線②、斜線③是針對(duì)3種不同負(fù)載特性在加減速過程中而設(shè)置的,可參考lg公司《is5系列變頻器用戶手冊(cè)》來(lái)了解這個(gè)問題,這里不再贅述。
(7)與電機(jī)保護(hù)直接相關(guān)的參數(shù)
變頻器不僅是一個(gè)變頻、變壓裝置,更是一個(gè)電機(jī)綜合保護(hù)裝置,通常都有以下保護(hù)功能參數(shù):輸入/輸出缺相保護(hù)、電子熱保護(hù)、熱敏保護(hù)、過載保護(hù)、過流保護(hù)、堵轉(zhuǎn)保護(hù)等。除輸入缺相保護(hù)是對(duì)進(jìn)線電源因素的保護(hù)外,后5種保護(hù)都是針對(duì)電機(jī)的直接保護(hù),區(qū)別在于熱敏保護(hù)是一種直接的電機(jī)溫度信號(hào)檢測(cè)結(jié)果的保護(hù),而其它保護(hù)則是一種基于電機(jī)銘牌數(shù)據(jù)(包括額定功率、電流、電壓、頻率、轉(zhuǎn)速,以及定子電阻與電抗)而進(jìn)行的電流熱效應(yīng)計(jì)算的理論保護(hù)。電機(jī)的銘牌數(shù)據(jù)可以手動(dòng)設(shè)置,在大多數(shù)主流變頻器中,也可以利用一個(gè)被稱為“自動(dòng)馬達(dá)適配”(ama:auto motor adapter)的參數(shù)幫助我們自動(dòng)設(shè)置電機(jī)的部分特征參數(shù)。另外,需要指出的是堵轉(zhuǎn)保護(hù)功能的使能作用,經(jīng)常會(huì)導(dǎo)致電機(jī)啟動(dòng)過程中實(shí)際加減速時(shí)間將不再嚴(yán)格按照加減速時(shí)間參數(shù)的設(shè)定值進(jìn)行,通常會(huì)導(dǎo)致實(shí)際啟停過程的時(shí)間延長(zhǎng)。
(8)與啟停操作和頻率給定方式相關(guān)的參數(shù)
撇開rs-485串行通訊方式,變頻器的啟停操作方式和頻率給定方式一般都各自有2種:操作面板和端子。因此,我們可以得出變頻器如表1所述的4種組合運(yùn)行方式:

其中,“0”代表該方式無(wú)效,“1”代表該方式有效。它們各代表的意義是,編號(hào)0:全端子操作與頻率給定方式;編號(hào)1:端子啟停+面板頻率給定方式;編號(hào)2:面板啟停+端子頻率給定方式;編號(hào)3:全面板操作與頻率給定方式。在集中控制系統(tǒng)應(yīng)用中以編號(hào)0方式(下文會(huì)常用到)使用的最多。
在對(duì)變頻器的主要基本參數(shù)做出介紹后,下面讓我們來(lái)介紹一下變頻器中都有哪些常用的控制方式,針對(duì)這些控制方式都應(yīng)用在哪些比較典型的應(yīng)用場(chǎng)合,以及相應(yīng)需要設(shè)置哪些相關(guān)參數(shù)。
本文把以下將要介紹的開環(huán)與閉環(huán)控制方式、工藝過程控制方式、開環(huán)轉(zhuǎn)矩控制方式、速度反饋轉(zhuǎn)矩控制方式統(tǒng)稱為常規(guī)控制方式,而把專用變頻器或通過選件卡實(shí)現(xiàn)的為某個(gè)特定行業(yè)應(yīng)用而 采用的控制方式稱為特殊控制方式。
3 開環(huán)與閉環(huán)速度控制方式
對(duì)變頻器控制而言,所謂開環(huán)就是變頻器的運(yùn)行輸出頻率只受頻率給定值大小變化的影響,而沒有與外部反饋信號(hào)作用建立數(shù)學(xué)關(guān)系或根本就不存在外部反饋信號(hào)。可見開環(huán)控制方式在概念上是一種只顧“命令”而不顧“實(shí)際結(jié)果”的控制方式(之所以說(shuō)是概念上,是因?yàn)楝F(xiàn)在有些變頻器產(chǎn)品,諸如通過滑差補(bǔ)償?shù)葏?shù)的設(shè)定可以達(dá)到命令與結(jié)果之間有一定程度的關(guān)聯(lián)),因此,開環(huán)速度控制方式的速度精度不夠精確,對(duì)需要追求高精度速度準(zhǔn)確性或?qū)嶋H速度追蹤調(diào)節(jié)的控制應(yīng)用場(chǎng)合,就需要采用閉環(huán)速度控制方式。
需要申明的是,我們?cè)谶@里講的開環(huán)與閉環(huán)都是站在變頻器設(shè)備的角度而不是控制系統(tǒng)角度進(jìn)行判定的。比如,在我們經(jīng)常看到的變頻恒壓供水系統(tǒng)中,那些通過數(shù)字pid儀表來(lái)設(shè)定壓力給定值和接收現(xiàn)場(chǎng)壓力變送器的實(shí)際壓力反饋信號(hào)的控制方式,若站在控制系統(tǒng)角度,這個(gè)系統(tǒng)就是閉環(huán)控制方式,但若站在變頻器角度看,在這里仍然被稱為開環(huán)控制方式,因?yàn)閷?duì)變頻器而言它的運(yùn)行頻率給定來(lái)自pid儀表的輸出,整個(gè)給定、反饋、調(diào)節(jié)等功能全部又pid儀表來(lái)完成的,變頻器只是被作為一個(gè)驅(qū)動(dòng)執(zhí)行設(shè)備在使用。
3.1 開環(huán)速度控制方式
問題1的提出
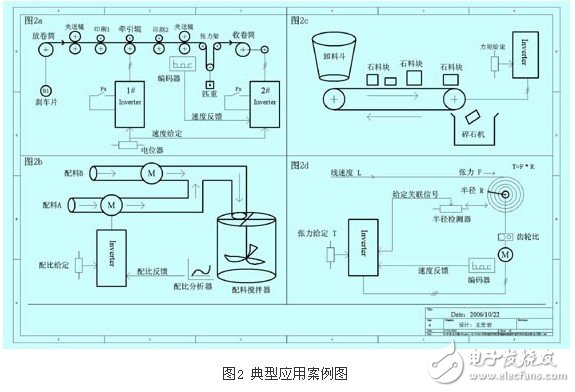
假設(shè)有這樣一個(gè)印刷業(yè)務(wù)用戶,如圖2(a)所示,希望通過變頻驅(qū)動(dòng)實(shí)現(xiàn)對(duì)收卷過程的恒定線速度控制,具體要求如下:
(1) 啟停操作和調(diào)速都在現(xiàn)場(chǎng)操作箱上進(jìn)行,并可通過電位器在控制箱上調(diào)節(jié)收卷的線速度;
(2) 收卷電機(jī)的線速度要始終與牽引電機(jī)的線速度保持一致(放卷由剎車片控制,張力由張力架調(diào)節(jié));
(3) 限定速度調(diào)節(jié)范圍。
針對(duì)用戶的機(jī)械設(shè)備和提出的這個(gè)需求,我們將其控制驅(qū)動(dòng)對(duì)象分為2個(gè)部分:牽引輥道電機(jī)驅(qū)動(dòng)和收卷筒電機(jī)的驅(qū)動(dòng)。
問題1的分析
首先,讓我們看看用戶對(duì)牽引電機(jī)控制的要求,針對(duì)用戶的需求,可以把其中對(duì)牽引電機(jī)的需求收集為表2所示的具體子項(xiàng),并將這些子項(xiàng)對(duì)應(yīng)給出所需求的變頻器功能。
很顯然,按照表2中的參數(shù),在牽引電機(jī)上只需要采用開環(huán)速度控制方式就可以滿足用戶對(duì)牽引電機(jī)變頻驅(qū)動(dòng)的要求。同時(shí),按照表2中的各項(xiàng)“需求對(duì)應(yīng)的變頻器功能”,我們也很容易去尋找到具備這樣功能的變頻器,那么,我們也就能相當(dāng)輕松地完成用戶對(duì)牽引電機(jī)的控制需求了。當(dāng)然,除了表2中的需要功能外,變頻器的一些基本參數(shù)功能,諸如:電機(jī)參數(shù)、頻率參數(shù)、加減速時(shí)間參數(shù)等(如第2節(jié)內(nèi)容所提到的一些基本參數(shù)),無(wú)論在什么樣的控制方式應(yīng)用系統(tǒng)中都是必不可少需要設(shè)置的,這里不再贅述(以下類同,略)。
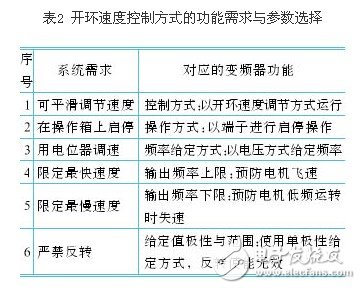
通過以上分析,可以得出如表2所示的分析結(jié)果。再按照表2中的歸類后的功能需求,逐個(gè)分解為對(duì)變頻器某些特定的、具體的參數(shù)的設(shè)置,這樣就可以得到如圖2(a)中的1#變頻器所示的設(shè)計(jì)結(jié)構(gòu)圖了。圖2(a)中的1#變頻器采用的控制方式就是開環(huán)控制、編號(hào)0方式。
在本文中,對(duì)于常規(guī)控制方式的案例分析中,不準(zhǔn)備將諸如表2中的對(duì)應(yīng)的變頻器功能再進(jìn)一步轉(zhuǎn)化為某個(gè)特定品牌的變頻器參數(shù),以免給讀者造成品牌依賴性誤導(dǎo)(以下常規(guī)控制方式的案例同),只想表達(dá)一種思維過程,供讀者參考。而對(duì)于特殊應(yīng)用場(chǎng)合的控制方式,將以具體品牌為例加以說(shuō)明。
3.2 閉環(huán)速度控制方式
問題2的提出
同問題1的提出,如圖2(a),略。
問題2的分析
首先,由于用戶需要收卷電機(jī)的運(yùn)行線速度與牽引電機(jī)保持一致,為達(dá)到這個(gè)目的,我們只要將牽引電機(jī)與收卷電機(jī)用同一個(gè)速度給定就可以實(shí)現(xiàn)這2臺(tái)電機(jī)角速度的一致(當(dāng)然,也可以將牽引電機(jī)實(shí)際運(yùn)行速度的輸出信號(hào)dc4~20ma或dc0~5v/10v作為收卷電機(jī)的速度給定信號(hào),這2種方式的差異在于:前者為同步速率給定方式;而后者為主從隨動(dòng)給定方式,存在一定的響應(yīng)延遲,具體差異分析,略);其次,由于收卷滾筒在運(yùn)行過程中,隨著紙張等物體被不斷地纏繞在滾筒上,導(dǎo)致滾筒的半徑在不斷地增大,如果收卷電機(jī)的角速度保持不變,那么,收卷過程中的線速度也同樣在不斷地加快,為滿足用戶對(duì)收卷過程中線速度恒定的需求,必須想辦法讓收卷電機(jī)的角速度隨滾筒半徑的增長(zhǎng)而降低,以實(shí)現(xiàn)線速度恒定的目的。為此,需要一個(gè)檢測(cè)線速度的傳感器信號(hào),以此來(lái)作為變頻器的速度反饋,告訴變頻器要做出角速度的實(shí)時(shí)調(diào)整。在本例中,我們?cè)趭A送導(dǎo)向輥上安裝了編碼器(不能安裝在電機(jī)軸或收卷滾筒軸上,否則,編碼器測(cè)出的信號(hào)就不是線速度反饋信號(hào)而是角速度反饋信號(hào)),以編碼器的脈沖率來(lái)表示實(shí)際線速度的快慢。如圖2(a)中所示,這樣對(duì)于2#變頻器而言,它既有一個(gè)用電位器表示的給定速度,又有一個(gè)用編碼器的脈沖來(lái)表示的實(shí)際速度反饋信號(hào),因此,2#變頻器就應(yīng)該是一個(gè)閉環(huán)速度控制方式的應(yīng)用案例。
通過以上對(duì)用戶需求的分析,我們可以得出如表3所示的結(jié)果。
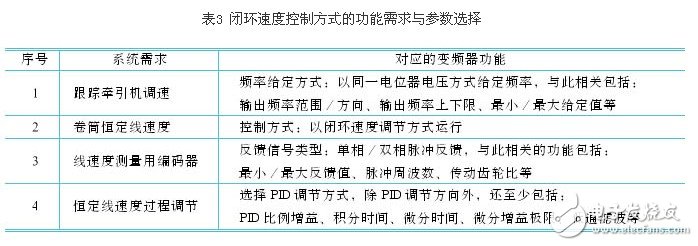
在表3中,我們略去了與閉環(huán)速度控制非直接相關(guān)的其它一些功能的列舉,在實(shí)際應(yīng)用中就像對(duì)基本參數(shù)的需求一樣,同樣需要對(duì)這些功能進(jìn)行選擇與相應(yīng)參數(shù)的設(shè)置。
4 工藝過程閉環(huán)控制方式
傳統(tǒng)的v/f控制實(shí)際上是一種角速度的控制模式,而閉環(huán)速度控制是通過對(duì)實(shí)際角速度的檢測(cè)的一種調(diào)節(jié)控制。但是,在現(xiàn)實(shí)的許多應(yīng)用場(chǎng)合,顯然,我們并不只關(guān)心電機(jī)的速度,而可能更多地要關(guān)注生產(chǎn)工藝過程中的某些被控對(duì)象的參數(shù)測(cè)量值,這些參數(shù)包括:溫度、壓力、流量、液位等信號(hào)。比如,在混配料系統(tǒng)中,我們可能需要關(guān)心某種配料的質(zhì)量或流量,而這個(gè)量卻并不直接與電機(jī)的速度成正比例或反比例關(guān)系,這是工藝閉環(huán)過程控制與上面所敘述的閉環(huán)速度控制的根本差別,當(dāng)然,工藝過程閉環(huán)控制也是一種閉環(huán)控制,它關(guān)注的不是速度而是工藝過程的參數(shù)變量。在諸如這樣的一些應(yīng)用場(chǎng)合,就需要我們采用工藝過程閉環(huán)控制方式。
問題3的提出
假定有一個(gè)需要進(jìn)行混配料比例控制的用戶,他的配料a和配料b由各自的配料電機(jī)送入配料攪拌筒中進(jìn)行混合均勻攪拌,其中,配料b有生產(chǎn)過程決定其送料的多少,而配料a需要根據(jù)配料b的變化始終保持在攪拌筒混合料中的比例恒定,如圖2(b)所示。現(xiàn)要求對(duì)配料a的電機(jī)進(jìn)行變頻控制,以實(shí)現(xiàn)如下具體需求:
(1) 配料a的比例可以自由設(shè)定;
(2) 既使在配料b的量是變化的時(shí)候,配料a在混料攪拌筒中的比例也要維持在設(shè)定比例。
問題3的分析
首先,用戶對(duì)配料電機(jī)a的控制需求是要根據(jù)配料b的變化始終維持恒定的配料a所占比例的一種閉環(huán)控制方式,這個(gè)反饋信號(hào)是混料筒中的配料a所占的比例信號(hào),它與電機(jī)的速度無(wú)關(guān),因此,可以準(zhǔn)確地定位這種控制需求為工藝過程閉環(huán)控制方式。其次,用戶要求配料比可以在生產(chǎn)過程中根據(jù)需要進(jìn)行設(shè)定,為此,需要提供配料a所占比例的設(shè)定手段—電位器給定配料比方式。椐此可以得到如表4所示的需求與對(duì)應(yīng)功能。
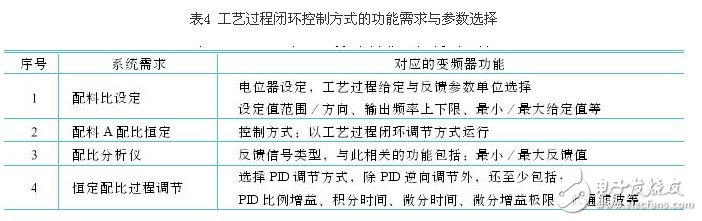
對(duì)比表4與表3,可以看見,他們之間的差異除了控制方式的選擇區(qū)別外,還有一個(gè)最為明顯的差異,那就是表4中作為控制對(duì)象的參考量與反饋值都是生產(chǎn)工藝過程中的參數(shù)(這樣設(shè)定的參數(shù)與反饋的參數(shù)都更直接表達(dá)了生產(chǎn)過程狀態(tài),也更加直觀明了),而不再是速度參數(shù)。撇開這些表面上的差異,幾乎完全可以用一個(gè)虛擬的閉環(huán)“速度”控制來(lái)實(shí)現(xiàn)。從這個(gè)意義上講,工藝過程閉環(huán)控制方式與閉環(huán)速度控制方式在本質(zhì)上是沒有差異的,它是閉環(huán)速度控制方式的延伸形式與變種應(yīng)用。
5 開環(huán)轉(zhuǎn)矩控制方式
上面介紹的無(wú)論是開環(huán)與閉環(huán)速度控制,還是工藝過程閉環(huán)控制,其實(shí)質(zhì)都還是變頻器的矢量控制技術(shù)的一種應(yīng)用。矢量控制實(shí)現(xiàn)的基本原理是通過測(cè)量和控制異步電動(dòng)機(jī)定子電流矢量,根據(jù)磁場(chǎng)定向原理分別對(duì)異步電動(dòng)機(jī)的勵(lì)磁電流和轉(zhuǎn)矩電流進(jìn)行控制,從而達(dá)到控制異步電動(dòng)機(jī)轉(zhuǎn)矩的目的。具體是將異步電動(dòng)機(jī)的定子電流矢量分解為產(chǎn)生磁場(chǎng)的勵(lì)磁電流分量和產(chǎn)生轉(zhuǎn)矩的轉(zhuǎn)矩電流分量分別加以控制,并同時(shí)控制兩分量間的幅值和相位,即控制定子電流矢量,所以,稱這種控制方式稱為矢量控制方式。矢量控制方式又有基于轉(zhuǎn)差頻率控制的矢量控制方式、無(wú)速度傳感器矢量控制方式和有速度傳感器的矢量控制方式等。而轉(zhuǎn)矩控制則是以轉(zhuǎn)矩為中心來(lái)進(jìn)行磁鏈、轉(zhuǎn)矩的綜合控制。和矢量控制不同,直接轉(zhuǎn)矩控制不采用解耦的方式,從而在算法上不存在旋轉(zhuǎn)坐標(biāo)變換,簡(jiǎn)單地通過檢測(cè)電機(jī)定子電壓和電流,借助瞬時(shí)空間矢量理論計(jì)算電機(jī)的磁鏈和轉(zhuǎn)矩,并根據(jù)與給定值比較所得差值,實(shí)現(xiàn)磁鏈和轉(zhuǎn)矩的直接控制。
對(duì)交流電機(jī)的直接轉(zhuǎn)矩控制(dtc)技術(shù)的引入,使得交流電機(jī)轉(zhuǎn)矩特性像直流電機(jī)一樣在應(yīng)用中表現(xiàn)的“硬”起來(lái)了,因此,dtc可以說(shuō)是變頻器技術(shù)發(fā)展史上的又一個(gè)里程碑。目前,在丹佛斯vlt2800/5000、abbacs6000、愛默生td2000等產(chǎn)品中都有直接轉(zhuǎn)矩控制功能。
開環(huán)轉(zhuǎn)矩控制方式就是利用變頻器本身對(duì)電機(jī)的轉(zhuǎn)矩的控制來(lái)實(shí)現(xiàn)輸出軸轉(zhuǎn)矩的穩(wěn)定控制,這種控制方式可廣泛地應(yīng)用在那些在運(yùn)行過程中需要保持轉(zhuǎn)矩恒定,不需要改變運(yùn)行方向的場(chǎng)合,諸如:卷繞、擠壓、皮帶輸送等相關(guān)行業(yè)應(yīng)用。
問題4的提出
假定有一個(gè)石料廠的皮帶輸送機(jī)用戶,皮帶輸送機(jī)需要不斷地將從料斗中卸下的片石塊送到破碎機(jī)中進(jìn)行破碎,如圖2(c)所示,用戶想對(duì)這個(gè)皮帶輸送機(jī)進(jìn)行變頻驅(qū)動(dòng)改造,具體要求如下:
(1)由于料斗下料的大小、快慢不均勻,致使落在皮帶上的石塊總量不一致,希望即使在皮帶上的石塊較多時(shí),皮帶也能夠拖的動(dòng);
(2)皮帶上的石料多時(shí),速度可慢些,在皮帶上的石料較少時(shí),希望皮帶能盡可能快些;
(3)現(xiàn)場(chǎng)無(wú)法提供檢測(cè)石塊在皮帶上數(shù)量多少的信號(hào)。
問題4的分析
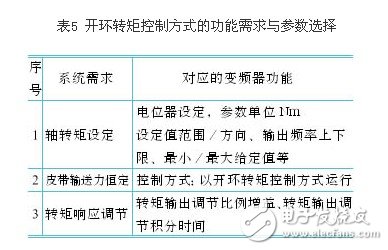
首先,應(yīng)用現(xiàn)場(chǎng)無(wú)法提供被控對(duì)象的檢測(cè)信號(hào),可以說(shuō)只能采用開環(huán)控制方式;其次,用戶的第②個(gè)需求,實(shí)質(zhì)上就是轉(zhuǎn)矩控制的運(yùn)行特點(diǎn),而要保證一個(gè)始終穩(wěn)定的輸出轉(zhuǎn)矩(用戶的第①個(gè)要求)就只有采用轉(zhuǎn)矩控制方式,至此,我們可以肯定地說(shuō)這個(gè)案例需要采用開環(huán)轉(zhuǎn)矩控制方式。椐此可以得到如表5所示的需求與對(duì)應(yīng)功能。
用以上的方法在給一個(gè)90kw電機(jī)調(diào)試后,其表現(xiàn)出以下運(yùn)行特征現(xiàn)象:
(1)當(dāng)皮帶上的石塊量較少時(shí),皮帶以較快的速度在運(yùn)轉(zhuǎn)(但不會(huì)超越輸出頻率上限的限定50hz);
(2)當(dāng)皮帶上的石塊量較多時(shí)(接近給定轉(zhuǎn)矩),皮帶運(yùn)行在32hz~38hz;
(3)當(dāng)皮帶上的石塊量很多時(shí)(超越給定轉(zhuǎn)矩),皮帶停止輸送。盡管此時(shí)電機(jī)停止運(yùn)轉(zhuǎn),即相當(dāng)于堵轉(zhuǎn)表現(xiàn)的狀態(tài),但與通常的堵轉(zhuǎn)有本質(zhì)區(qū)別,在轉(zhuǎn)矩控制方式下,此時(shí)電機(jī)不會(huì)在短時(shí)間內(nèi)燒壞。
6 速度反饋轉(zhuǎn)矩控制方式
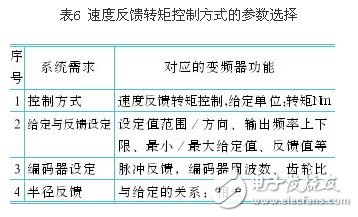
在開環(huán)轉(zhuǎn)矩控制案例中,了解到轉(zhuǎn)矩控制的一些特點(diǎn),那么,如果應(yīng)用場(chǎng)合在既需要保持控制轉(zhuǎn)矩穩(wěn)定輸出的同時(shí)又需要根據(jù)速度反饋信號(hào)進(jìn)行相應(yīng)調(diào)節(jié),此時(shí),就要選擇帶速度反饋的轉(zhuǎn)矩控制方式。速度反饋轉(zhuǎn)矩控制方式最適合應(yīng)用在卷繞、抽絲等紡織行業(yè)。在圖2(a)中,如果沒有張力架,收卷的張力需要依靠在變頻器上進(jìn)行設(shè)定,并且要根據(jù)收卷筒半徑的變化作為反饋來(lái)適時(shí)自動(dòng)調(diào)整電機(jī)輸出轉(zhuǎn)矩和角速度調(diào)整,來(lái)保持卷取切線力的恒定和線速度恒定,而將編碼器信號(hào)作為速度反饋信號(hào),來(lái)保持角速度的恒定。在圖2(d)中給出了控制結(jié)構(gòu)。按照?qǐng)D2(d)的構(gòu)造,得到表6所示的參數(shù):
以上介紹常規(guī)控制方式是變頻器應(yīng)用領(lǐng)域使用最為普遍的方式,約占整個(gè)變頻器應(yīng)用需求市場(chǎng)的70%以上,準(zhǔn)確掌握這些基本控制方式的內(nèi)涵與應(yīng)用技巧,基本上可以勝任變頻器的售前或售后技術(shù)服務(wù)支持工作。但對(duì)于一些特殊應(yīng)用需求的場(chǎng)合,還需要掌握一些專用變頻器的應(yīng)用技術(shù)和相關(guān)的控制概念以及生產(chǎn)工藝需求。這些比較特殊的應(yīng)用場(chǎng)合一般都需要借助于變頻器廠家針對(duì)各個(gè)行業(yè)生產(chǎn)的“選件卡”或?qū)S米冾l器。
當(dāng)前,由于變頻器行業(yè)的激烈競(jìng)爭(zhēng),各變頻器生產(chǎn)廠家?guī)缀醵荚谂ふ易约涸谙嚓P(guān)行業(yè)上的專用功能產(chǎn)品的研發(fā)與定位。下面,簡(jiǎn)要介紹幾種在市場(chǎng)上使用比較廣泛的特殊控制方式的概念,詳細(xì)的應(yīng)用方法還需要用戶進(jìn)一步參考相應(yīng)的選件手冊(cè)或說(shuō)明書。
7 其它特殊應(yīng)用場(chǎng)合的控制方式
在這里之所以將以下的應(yīng)用場(chǎng)合稱為特殊應(yīng)用場(chǎng)合,是因?yàn)樽冾l器的這些衍生的控制方式是針對(duì)某個(gè)特定的行業(yè)應(yīng)用開發(fā)的。撇開行業(yè)的特殊性,這些具有特殊控制功能的變頻器本身就是一個(gè)內(nèi)在的、多變量輸入與反饋的閉環(huán)控制系統(tǒng),只不過這些變量可能不僅有電流參數(shù),還可能有轉(zhuǎn)矩參數(shù)、計(jì)算速度參數(shù)、計(jì)算功率以及甚至有時(shí)間參數(shù)和空間位置參數(shù)等。
7.1 曳引拖動(dòng)控制方式
傳統(tǒng)的放卷筒的控制都是采用諸如力矩電機(jī)、剎車片、磁粉離合器等方式,lgis5變頻器的應(yīng)用組參數(shù)app-33(標(biāo)準(zhǔn)配置,無(wú)須選件)可以實(shí)現(xiàn)對(duì)諸如需要在正常運(yùn)行過程中處于力矩控制方式下的發(fā)電運(yùn)行狀態(tài)。當(dāng)收卷電機(jī)僅以一個(gè)恒定的線速度運(yùn)行時(shí),若系統(tǒng)需要控制張力,可以通過參數(shù)app-34來(lái)設(shè)定放卷張力的大小,由放卷電機(jī)來(lái)控制張力。曳引拖動(dòng)控制方式與前面介紹的開環(huán)力矩控制方式的區(qū)別在于:
(1) 曳引拖動(dòng)控制方式正常運(yùn)行在發(fā)電狀態(tài),而開環(huán)力矩控制方式則運(yùn)行在電動(dòng)狀態(tài);
(2) 曳引拖動(dòng)控制方式在受到的外界牽引力小于設(shè)定值時(shí),它將正向運(yùn)轉(zhuǎn);反之,反向運(yùn)轉(zhuǎn);而開環(huán)力矩控制方式要么正向運(yùn)轉(zhuǎn),要么停止運(yùn)轉(zhuǎn)。
在一個(gè)收卷與放卷的應(yīng)用中,如果將放卷使用曳引拖動(dòng)控制方式,收卷使用速度閉環(huán)控制,通過收卷和放卷變頻器的直流母線共享技術(shù),不僅可以實(shí)現(xiàn)線速度恒定的恒張力控制目的,而且可以達(dá)到最大限度的節(jié)能效益。系統(tǒng)成本低、安裝調(diào)試容易。
7.2 三角波控制方式與擺頻控制方式
7.2.1 lg公司的is5系列變頻器三角波控制方式介紹
由于紡織過程對(duì)紡錘繞線形狀的特殊要求,lg公司的is5系列變頻器三角波控制功能可以滿足這個(gè)需求,它的應(yīng)用組參數(shù)app-02~app-07(標(biāo)準(zhǔn)配置,無(wú)須選件)是用來(lái)設(shè)置三角波控制方式的參數(shù),如表7所示。
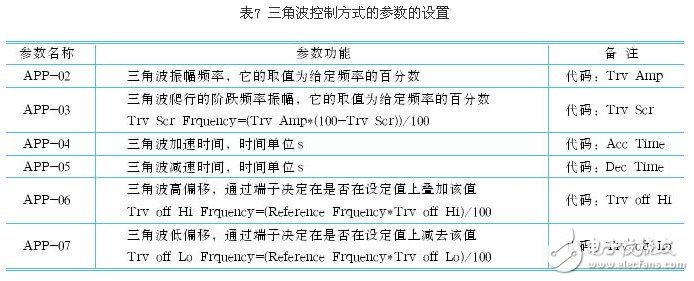
在圖3(a)中給出了紡錘繞線工藝結(jié)構(gòu),在圖3(b)中給出了三角波控制方式的參數(shù)app-02~app-07與變頻器設(shè)定頻率、實(shí)際輸出運(yùn)行頻率之間的關(guān)系。
無(wú)論在圖3(b)中還是在圖3(d)中,只要適當(dāng)?shù)恼{(diào)整相關(guān)參數(shù)的設(shè)定就完全可以滿足紡織行業(yè)紡錘對(duì)變頻器輸出這種振幅波形的需要。
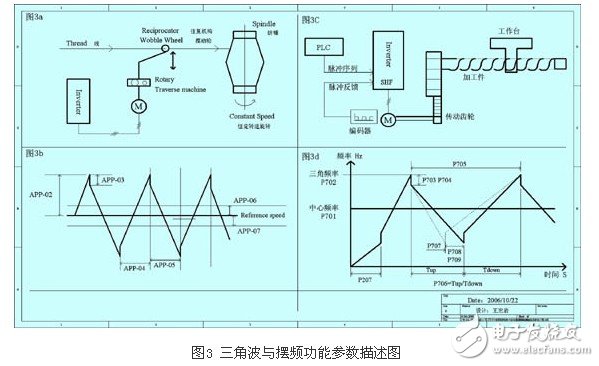
7.2.2 danfoss公司的擺頻選卡擺頻功能介紹
同樣針對(duì)圖3(a)所示的需求結(jié)構(gòu),通過在vlt5000系列變頻器中安裝一個(gè)擺頻選件卡,那么,也同樣可以得到滿意的控制結(jié)果。圖3(d)中給出了擺頻卡控制方式下的功能參數(shù)p701~p709與變頻器設(shè)定頻率、實(shí)際輸出運(yùn)行頻率之間的關(guān)系。參數(shù)p701~p709的相應(yīng)功能作用解釋如表8所示。
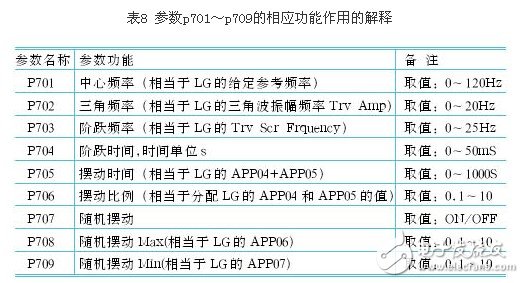
需要注意的時(shí),擺頻卡的參數(shù)p701~p709只有在參數(shù)p100選擇為開環(huán)速度控制方式,同時(shí),參數(shù)p700選擇為擺頻模式有效時(shí)才起作用。
7.3 定位控制方式與同步控制方式
在運(yùn)動(dòng)控制領(lǐng)域通常有定位控制與同步控制兩種,長(zhǎng)期以來(lái),在精密機(jī)械加工行業(yè)的定位與同步控制都一直是步進(jìn)驅(qū)動(dòng)器與伺服驅(qū)動(dòng)器的天下,傳統(tǒng)的變頻器只能望而卻步。今天,可以驚喜地告訴大家,已經(jīng)有很多廠家生產(chǎn)的變頻器,通過安裝其選件卡就完全可以應(yīng)用在這種行業(yè)了。
7.3.1 定位控制方式簡(jiǎn)介
(1)圖3(c)顯示了三墾變頻器在機(jī)床加工行業(yè)的定位控制應(yīng)用,它利用ihf變頻器,通過使用三墾vm05的定位控制(point topoint控制)功能可以精確地實(shí)現(xiàn)機(jī)加工作業(yè)的定位。
(2)danfoss vlt5000系列變頻器,通過安裝同步定位卡(programmable syncpos motioncontroller),也完全可以實(shí)現(xiàn)精確定位功能。不僅需要進(jìn)行相關(guān)參數(shù)設(shè)置,同時(shí)還需要對(duì)該控制卡進(jìn)行編程。
7.3.2 同步控制方式簡(jiǎn)介
如果說(shuō),在運(yùn)動(dòng)控制中,定位控制追求的是相對(duì)位置或絕對(duì)位置的定位精確性,那么,同步控制追求的就是多主機(jī)的協(xié)調(diào)一致性或主從隨動(dòng)性,它對(duì)動(dòng)態(tài)響應(yīng)性能有很高的要求。
danfoss的同步定位卡(programmable syncpos motioncontroller)既可以實(shí)現(xiàn)虛擬主軸(virtual mastersynchronization)方式同步,又可以實(shí)現(xiàn)主從方式同步(master-slaversynchronization),是取代伺服驅(qū)動(dòng)方式的理想方案。更詳細(xì)的控制功能與參數(shù),請(qǐng)參閱《danfoss programmablesyncpos motion controller manual》。
以上僅給出了部分特殊應(yīng)用選件卡功能的簡(jiǎn)單介紹,隨著變頻器的發(fā)展將來(lái)必定會(huì)有更多專業(yè)應(yīng)用領(lǐng)域的專業(yè)特殊功能變頻器產(chǎn)品或功能選件卡上市,若有興趣或應(yīng)用需求,可給予關(guān)注、研究。
8 結(jié)束語(yǔ)
實(shí)際上,作為變頻器應(yīng)用技術(shù)工程師,哪怕一個(gè)參數(shù)都記不住也不可怕,可怕的是不能從應(yīng)用需求的角度去分析對(duì)變頻器功能的歸類劃分與整理。只有深入理解變頻器原理、準(zhǔn)確把握參數(shù)概念的功能實(shí)質(zhì)并靈活掌握參數(shù)的組合應(yīng)用技巧,才敢于面對(duì)現(xiàn)實(shí)中各種復(fù)雜的應(yīng)用需求場(chǎng)合,才有可能做到臨場(chǎng)不亂、胸有成竹。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論