 電子發燒友App
電子發燒友App


機器視覺系統中,鏡頭相當于人的眼睛,其主要作用是將目標的光學圖像聚焦在圖像傳感器(相機)的光敏面陣上。視覺系統處理的所有圖像信息均通過鏡頭得到,鏡頭的質量直接影響到視覺系統的整體性能。下面對機器視覺工業鏡頭的相關專業術語做以詳解。
一、遠心光學系統:
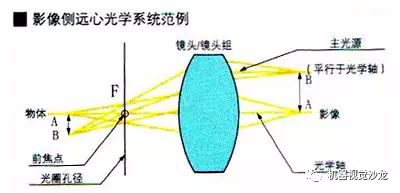
指主光線平行于鏡頭光學軸的光學系統。而光從物體朝向鏡頭發出,與光學軸保持平行,甚至在軸外同樣如此,則稱為物體側遠心光學系統。光從鏡頭朝向影像,與與光學軸保持平行,甚至在軸外同樣如此,則稱為影像側遠心光學系統。
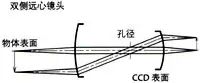
二、遠心鏡頭:
遠心鏡頭指主光線與鏡頭光源平行的鏡頭。有物體側的遠心,成像側的遠心,兩側的遠心行頭等方式。
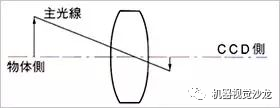
通常的鏡頭
?
?
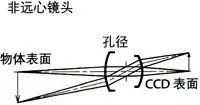
主光線與鏡頭光軸有角度,因此工件上下移動時,像的大小有變化。
兩方遠心境頭
?
?
主物方,像方均為主光線與光軸平行
光圈可變,可以得到高的景深,比物方遠心境頭更能得到穩定的像
最適合于測量用圖像處理光學系統,但是大型化成本高
物方遠心境頭
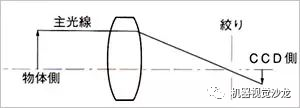
只是物方主光線與鏡頭主軸平行
工件上下變化,圖像的大小基本不會變化
使用同軸落射照明時的必要條件,小型化亦可對應
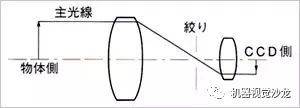
像方遠心境頭
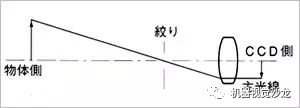
只是像方主光線與鏡頭光軸平行
相機側即使有安裝個體差,也可以吸收攝影倍率的變化
用于色偏移補償,攝像機本應都采用這種鏡頭
三、遠心光學系統的特色:
?
?
優點:更小的尺寸。減少鏡頭數量,可降低成本。
缺點:上下移動物體表面時,會改變物體尺寸或位置。
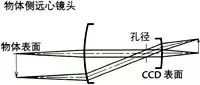
優點:上下移動物體表面時,不會改變物體尺寸或位置。使用同軸照明時。可使用更小的尺寸。
缺點:未使用同軸照明時,大于標準鏡頭的尺寸。
優點:與MML相似,但鏡頭凸緣后端的尺寸出現極大差異時,會改善精確度。
缺點:與MML相似,但成本比MML更高。
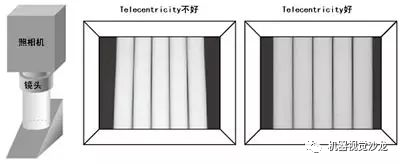
四、遠心:
Telecentricity是指物體的倍率誤差。倍率誤差越小,Telecentricity越高。Telecentricity有各種不同的用途,在鏡頭使用前,把握Telecentricity很重要。遠心鏡頭的主光線與鏡頭的光軸平行,Telecentricity不好,遠心鏡頭的使用效果就不好;Telecentricity可以用下圖進行簡單的確認。
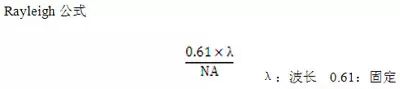
五、分辨率(μm):
光學系能力的尺度,表示黑白格狀圖案通過鏡頭觀察時,1mm中可以分辨觀察到黑白條紋的最多對數。分辨率為兩點間在無法識別前,能靠近的最近距離測量值,例如1μm的分辨率代表兩點間在無法識別前,能靠近的最近距離為1μm。以下為根據鏡頭的無相差光衍射情況計算理論分辨率的公式。
六、分辨力(Lines/mm):
分辯力指黑白網線圖鏡頭里影像內1mm面積,可識別的黑白兩色條紋數。分辨力的單位為線條/mm,例如100線條/mm代表可識別黑白間距1/100mm(10μm)。黑白線條的寬度為1/200mm(5μm)。
七、水平TV分辨率(TV線條):
寬度里的黑白水平線總條數,相當于電視機屏幕垂直高度的高度值。屏幕的垂直與水平長度比率通常為3:4,因此水平寬度里的總條數為3/4。電視機水平分辨率為240TV條線,電視機屏幕水平寬度的總條數為320條線。測量鏡頭的分辨率時,一組黑色與白色線條應視為一條線,但是在電視機分辨率線條方面,一組視為2TV線條。
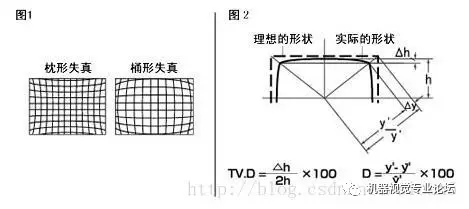
八、失真(%):
失真為光學軸外的直型物體,呈現曲線時的鏡頭像差。鏡頭失真也稱為鏡頭畸變,即光學透鏡固有的透視失真的總稱,可分為枕形失真和桶形失真,直線朝向中心的失真情況為枕形失真(Pincushion Distortion),向外擴張的失真稱為桶形失真(Barrel Distortion)。如下圖示:

九、TV失真(%):
TV屏幕上的影像失真。數值越接近零,牲能越高。

十、電視失真:
實際邊長的歪曲形狀與理想的形狀的百分比算出的值。
十一、孔徑效率邊際光量(%):
孔徑效率為使用鏡頭拍攝均勻亮度的物體時,成像盤光學軸與四周區域之間的亮度差異,單位為百分比(%),假設中央亮度為100,為鏡頭的光學特征之一。
十二、遮蔽(%):
遮蔽為使用鏡頭與CCD-TV鏡頭拍攝均勻亮度的物體時,電視機屏幕中央與邊緣之間的亮度差異,單位為百分比(%)。通常使用受光組件與CCD組件的功率比計算此百分比。遮蔽意指鏡頭與TV鏡頭的整體表現,可使用遠心光學系統以縮小遮蔽的情況。
十三、色差:
在鏡頭光學統中,形成影像的位置與影像放大倍率隨光線波長的不同而不同。不同波長的光線有不同的顏色,這叫做色彩失真。光學軸上的失真叫做色彩失真。放大倍率的差異則叫做放大倍率色彩失真。
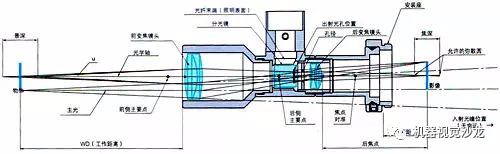
十四、工作距離(WD)(mm):
工作距離指鏡頭第一個工作面到被測物體的距離。
十五、物像間距離O/I(Object to Imager)
OI指物體到結像平面的距離。
?

?
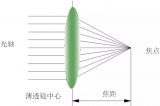
十六、焦距f(mm)后焦距/前焦距
焦距為光學系統的主光點到焦點的距離。從最后一片鏡頭的頂點到后焦點的距離,為后焦距。從第一片鏡頭的頂點到前焦點的距離,為前焦距。
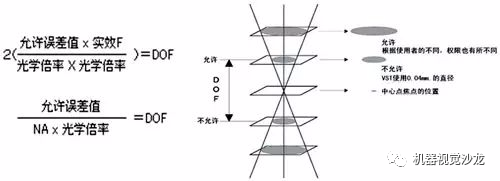
十七、景深:
深度為與物體從最佳焦點前后移動時.出現最銳利焦點的最近點與最遠點之間的距離。物體側的深度范圍稱為景深。同樣,照相機側的范圍稱為焦點深度。具體的景深的值多少略有不同。景深(Depth of Field)可以用以下的計算式計算出來:
景深 = 2 x Permissible COC x 實效F / 光學倍率2 = 允許誤差值 / (NA x 光學倍率)(使用的是0.04mm的Permissible COC)
通過鏡頭的影像理論土會形成點狀。清晰影像上出現可接受的摸糊情況,稱為可接受的彌散圓。
十八、焦深:
深度為當CCD從最佳焦點前后移動時,出現最銳利焦點的最近點與最遠點之間的距離。影像側的深度范圍稱為焦深。
十九、后截距(mm):
從鏡頭安裝座盤前端到影像的距離。
二十、C安裝座規格:
?
| 名稱 | 標準外徑 | 螺絲螺紋數(25.4mm用) | 后截距 |
| U1 | 25.4000mm | 32Threads | 17.526mm |
?
二十一、數值孔徑 NA,NA':
當物體在入射光孔上產生的半角為u,且折射率為n,n x sinu為物體側數值孔經(NA)。
當物體在出射光孔上產生的半角為u',且折射率為n',n' x sinu' 為影像側數值孔徑{NA')。
NA=n x sinu NA'=n' x sin u'
NA越高,鏡頭的分辨率與亮度越佳。如下圖所示 入射角度 u, 物體側折射率n, 成像側的折射率' n':NA = NA' x 放大率
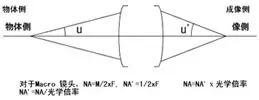
對于Macro鏡頭,NA =M/2 xF NA' = 1/2 xF NA=NA' x光學倍率 NA'=NA x光學倍率
二十二、F值F No:
此值指鏡頭的亮度。將鏡頭對焦距離除以物體側的有效直徑(入射光孔直徑Dmm),即可得到此數值,也可使用NA與鏡頭的光學放大倍率(β)計算。數值越小,鏡頭越明亮。
F No=焦距/入射孔徑或有効口徑=f/D
二十三、有效F No:
此值為具體在有限距離內的鏡頭亮度,指實際操作時的亮度。光學放大倍率越高(β),鏡頭越暗。
實效F = (1 +光學倍率) x F#,實效F = 光學倍率 / 2NA
二十四、光學放大倍率β:
?
| 物體尺寸與影像尺寸的比例。 | ? | |
| β | =y'/y | |
| ? | =b/a | |
| ? | =NA/NA' | |
| ? | =CCD鏡頭元件尺寸/視野實際尺寸 | |
?
二十、C安裝座規格:
?
| 名稱 | 標準外徑 | 螺絲螺紋數(25.4mm用) | 后截距 |
| U1 | 25.4000mm | 32Threads | 17.526mm |
?
二十一、數值孔徑 NA,NA':
當物體在入射光孔上產生的半角為u,且折射率為n,n x sinu為物體側數值孔經(NA)。
當物體在出射光孔上產生的半角為u',且折射率為n',n' x sinu' 為影像側數值孔徑{NA')。
NA=n x sinu NA'=n' x sin u'
NA越高,鏡頭的分辨率與亮度越佳。如下圖所示 入射角度 u, 物體側折射率n, 成像側的折射率' n':NA = NA' x 放大率
對于Macro鏡頭,NA =M/2 xF NA' = 1/2 xF NA=NA' x光學倍率 NA'=NA x光學倍率
二十二、F值F No:
此值指鏡頭的亮度。將鏡頭對焦距離除以物體側的有效直徑(入射光孔直徑Dmm),即可得到此數值,也可使用NA與鏡頭的光學放大倍率(β)計算。數值越小,鏡頭越明亮。
F No=焦距/入射孔徑或有効口徑=f/D
二十三、有效F No:
此值為具體在有限距離內的鏡頭亮度,指實際操作時的亮度。光學放大倍率越高(β),鏡頭越暗。
實效F = (1 +光學倍率) x F#,實效F = 光學倍率 / 2NA
二十四、光學放大倍率β:
?
| 物體尺寸與影像尺寸的比例。 | ? | |
| β | =y'/y | |
| ? | =b/a | |
| ? | =NA/NA' | |
| ? | =CCD鏡頭元件尺寸/視野實際尺寸 | |
?
二十五、光學倍率:
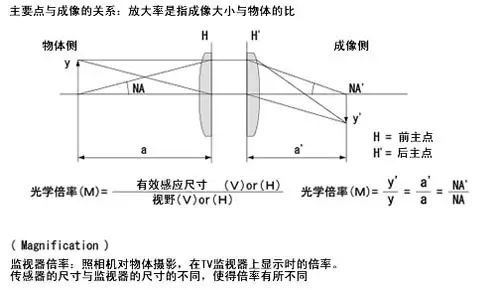
放大倍率(Magnification)指的是通過鏡頭的調整能夠改變拍攝對象原本成像面積的大小。光學倍率就是通過光學鏡頭變倍的放大倍率。主要點與成像的關系:放大率是指成像大小與物體的比。
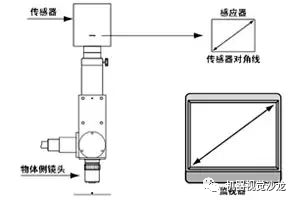
二十六、電子放大倍率:
電子放大倍率為影像在顯示器屏幕上顯示時與在CCD上顯示相比的放大倍率。
二十七、顯示器放大倍率:
顯示器放大倍率為通過鏡頭在顯示器呈現物體的放大倍率。
顯示器放大倍率=(光學放大倍率β) x (電子放大倍率)
(計算范例) 光學放大倍率=02x,CCD尺寸1/2"(對角線8mm),顯示器1/4":
電子放大倍率=14 x25.4/8=44.45
顯示器放大倍率=0.2x44.45=8.89(倍) (1英寸=25.44mm)
※有時根據TV監視器的掃描狀態,以上的簡易計算將有一些變化。
二十八、視野(FOV):
視野指使用照相機以后看到的物體側的范圍。
照相機有效區域的縱向長度(V)/光學倍率(M)=視野(V)
照相機有效區域的橫向長度(H)/光學倍率(M)=視野(H)
照相機有效區域的縱向長度(V)or(H)=照相機一個畫素的尺寸×有効畫素數(V)or(H)來計算。
(計算范例) 光學放大倍率=0.2x,CCD尺寸1/2"(長4.8mm,寬6.4mm}:
視野尺寸 長度=4.8/0.2=24(mm)
寬度=6.4/0.2=32{mm)
二十九、解析度:
表示了所能見到了2點的間隔0.61x 使用波長(λ)/ NA=解析度(μ),以上的計算方法理論上可以計算出解析度,但不包括失真。※使用波長為550nm
三十、解像力:
1mm中間可以看到黑白線的條數。單位(lp)/mm
三十一、MTF(Modulation Transfer Function):
成像時再現物體表面的濃淡變化而使用的空間周波數和對比度。
三十二、成像圈:
成像尺寸φ,要輸入相機感應器尺寸
三十三、照相機 Mount:
C-mount: 1" diameter x 32 TPI: FB: 17.526mm,CS-mount: 1" diameter x 32 TPI: FB: 12.526mm,F-mount: FB:46.5mm,M72-Mount: FB 廠家各有不同。
三十四、邊緣亮度:
相對照度是指中央的照度與周邊的照度的百分比。
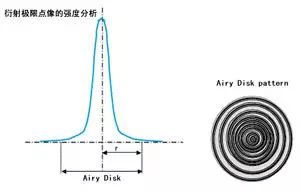
三十五、通風盤及解析度:
Airy Disk(通風盤)是指通過沒有失真的鏡頭在將光集中一點時,實際上形成的是一個同心圓。這個同心圓就叫做Airy Disk。Airy Disk的半徑r可以通過以下的計算公式計算出來。這個值稱為解析度。r= 0.61λ/NA Airy Disk的半徑隨波長改變而改變,波長越長,光越難集中于一點。 例:NA0.07的鏡頭 波長550nm r=0.61*0.55/0.07=4.8μ
三十六、 MTF 及解析度:
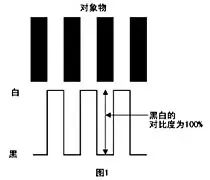
MTF(Modulation Transfer Function) 是指物體表面的濃淡變化,成像側也被再現出來。表示鏡頭的成像性能,成像再現物體的對比度的程度。測試對比性能,用的是具有特定空間周波數的黑白間隔測試。空間周波數是指1mm的距離濃淡變化的程度。
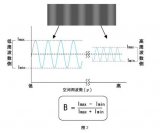
圖1所示,黑白矩陣波,黑白的對比度為100%.這個對象被鏡頭攝影后,成像的對比度的變化被定量化。基本上,不管什么鏡頭,都會出現對比度降低的情況。最終對比度降低至0%。,不能進行顏色的區別。
?
| ? |
| ? | ? |
| ? | ? |
| ? |
?
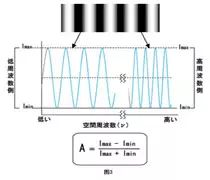
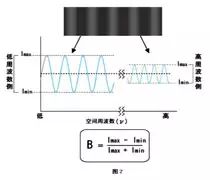
圖2、圖3顯示了物體側與成像側的空間周波數的變化。橫軸表示空間周波數,縱軸表示亮度。物體側與成像側的對比度由A、B計算出來。MTF由A,B的比率計算出來。
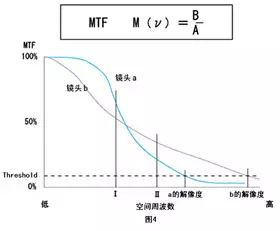
解析度與MTF的關系:解析度是指2點之間怎樣被分離認識的間隔。一般從解析度的值可以判斷出鏡頭的好壞,但是實際是MTF與解析度有很大的關系。圖4顯示了兩個不同鏡頭的MTF曲線。鏡頭a 解析度低但是具有高對比度。鏡頭b對比度低但是解析度高。
三十七、微距鏡頭:
不用近接環或特寫鏡頭而實現擴大攝影,為近接攝影而設計的鏡頭,有限遠(=從物鏡出射的光,在一定距離處聚焦)
三十八、CCTV鏡頭:
適合于廣范圍的擴大觀察,需要嚴格精度時不適合,無限遠(=從物鏡出射的光,不聚焦,平行前進)
三十九、變倍鏡頭:
焦距可變鏡頭,倍率,攝像范圍等可以簡單改變。適合于需要尋找最合適攝影條件(攝影距離,鏡頭的焦距)以便于操作的場合使用。不產生聚焦位置移動的稱為變倍鏡頭,產生焦距位置移動的稱為變焦鏡頭。
四十、成像圓:
光學系統中成像圓的尺寸,成像圓的尺寸=CCD對角尺寸,和CCD尺寸同樣意義。
四十一、后變倍鏡頭:
安裝在CCD前面,不改變工作距離,擴大視野范圍。F值下降,分辨率、對比度下降,聚焦會有些不準。
四十二、前變倍鏡頭:
安裝在鏡頭前面,工作距離會變化,亮度不變,擴大視野范圍
審核編輯:黃飛
?














 工商網監
工商網監
評論