步進電機一般分為永磁式(PM)、反應式(VR)和混合式(HB)三種類型。目前,二相混合式步進電機的應用最為廣泛。
2012-01-26 14:23:00 2921
2921 
步進電機也叫步進器,它利用電磁學原理,將電能轉換為機械能,人們早在20世紀20年代就開始使用這種電機。
2023-08-01 15:37:52688 使用低壓來控制。優點:高低壓控制在一點程度上改善了震動和噪音,第一次提出細分控制步進電機的概念,同時也提出了停止時電流減半的工作模式。缺點:電路相對恒電壓驅動復雜,對三極管高頻特性要求提高,電機低速
2016-01-27 14:45:02
步進電機特性及步距角計算方法步距角θ可用下式計算:θ=360°/(Zr×m)式中Zr是轉子齒數;m是運行拍數。步進電機作為執行元件,是機電一體化的關鍵產品之一, 廣泛應用在各種自動化控制系統中。隨著
2021-07-07 06:37:36
步進電機力矩的怎么計算?步進電機力矩計算方法。選擇步進電機時,首先要保證步進電機的輸出功率大于負載所需的功率。在選用功率步進電機時,首先要計算機械系統的負載轉矩,電機的矩頻特性能滿足機械負載并有一定
2021-09-03 07:16:10
伺服電機和步進電機的區別是什么?步進電機和交流伺服電機的性能有什么區別?步進電機具有哪些特性參數?
2021-09-29 07:05:46
步進電機和伺服電機控制的方式有何不同?步進電機和伺服電機的低頻特性有何不同?
2021-09-28 07:55:48
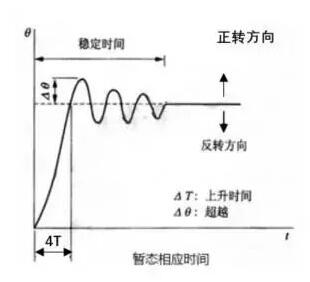
步進電機噪聲大的原因,步進電機的特性測量和噪音和振動的測量,步進電機基礎(6.2)-步進電機的特性測量方法-暫態(阻尼)特性的測量前言基本信息前言說明6.4 暫態(阻尼)特性的測量6.5 噪音和振動
2021-07-08 09:03:40
步進電機基礎(3.1)-步進電機的原理與特性之基礎理論前言基本信息公式前言說明步進電機的原理與特性之基礎理論3. 1 基礎理論1. 轉矩的產生及負載角1) PM型電機的轉矩及負載角2) VR型電機
2021-06-30 07:21:55
步進電機基礎(8.2)-步進電機的問題解決方案-降低振動噪音的解決方法前言基本信息前言說明8.2 降低振動噪音的解決方法1. 與驅動電路有關的方法2. 與電機有關的方法降低振動和噪音效果好的方法如下
2021-07-08 09:40:18
步進電機介紹步進電機的主要構造步進電機的工作原理步進電機的細分驅動控制步進電機的主要特性
2021-03-02 07:31:08
我的步進電機控制中,串的電阻發熱很厲害,有什么改善方法嗎?
2019-02-27 09:23:36
步進電機控制通常采用什么方法實現?
2021-09-30 07:15:35
步進電機基礎(8.1)-步進電機的問題解決方案-增加動態轉矩的解決方法前言基本信息前言說明8.1 增加動態轉矩的解決方法1 . 步進電機在低速時增加轉矩的方法1) 選擇步距角小的步進電機2) 雙極型
2021-07-07 07:29:39
步進電機最簡單的驅動方法,了解四軸步進電機驅動器原理 四軸步進電機驅動器原理-簡介四軸步進電機驅動器,其實就是一種將電脈沖轉化為角位移的執行機構。首先步進驅動器會接收到一個脈沖信號,然后它按設定
2021-07-12 08:18:40
我是剛剛接觸步進電機,想知道步進電機有哪些特性,我公司是賣步進電機和德國MEYLE編碼器,我一直不會區分兩種產品的特性和功能。求助大神幫忙解說?
2014-06-16 14:53:30
步進電機基礎(6.1)-步進電機的特性測量方法-靜態特性前言基本信息前言說明說明6.1 靜態特性1 . 靜態轉矩特性2. 靜 態 轉 矩 特 性 測 量1.轉矩表:2. 滑輪重量法:3. 應力計
2021-07-07 07:28:34
步進電機基礎(6.2)-步進電機的特性測量方法-動態特性的測量法前言基本信息前言說明6.1 靜態特性1 . 滑輪平衡法前言基本信息名稱描述說明教材名稱步進電機應用技術作者坂本正文譯者王自強前言
2021-07-08 07:46:31
) 脈沖頻率-慣量特性3. 暫態轉矩特性前言基本信息名稱描述說明教材名稱步進電機應用技術作者坂本正文譯者王自強公式θs = 180° /P*Nr公式(2. 1) 步進電機的步距角θs,其中Nr 為轉子極對數,P為定子相數 θs = ± [ (360°/mP) - (360°n...
2021-07-08 08:27:07
負載力矩可按公式(1-5)和公式(1-6)計算,電機在最大進給速度時,由矩頻特性決定的電機輸出力矩要大于Mf與Mt之和,并留有余量。一般來說,Mf與Mt之和應小于(0.2 ~0.4)Mmax。:步進電機的選型計算方法
2018-10-12 09:50:49
步進電機基礎(7.1)-步進電機的選擇方法-電機種類的選擇(各種步進電機的優缺點)前言基本信息前言說明說明7.1 電機種類的選擇1 . 由PM型 、VR型 、HB型來選定2 . 步進電機的相數選擇
2021-06-28 08:47:37
步進電機基礎(5.7)-步進電機的驅動與控制-加速控制、減速控制和附加制動的驅動方法前言基本信息前言說明5.7 加速控制、減速控制5.8 附加制動的驅動方法1. 反相序激磁制動2.最終步進延遲制動
2021-07-08 06:45:53
步進伺服電機回原點的常用方法是什么?
2021-09-29 07:18:40
什么是暫態分析?暫態分析的目的、內容和方法是什么?同步電機的數學模型同步發電機有哪幾個部分組成?如何對同步發電機進行簡化與等值?如何建立同步發電機的電壓方程和磁鏈方程?同步電機各繞組的自感和互感有什么特點?
2021-07-06 07:24:35
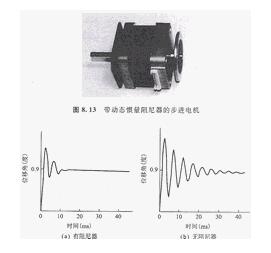
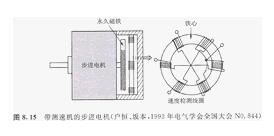
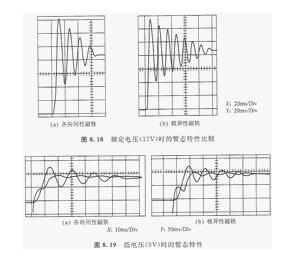
步進電機基礎(8.3)-步進電機的問題解決方案-改善暫態特性的解決方法前言基本信息前言說明8.3 改善暫態特性的解決方法1. 利用阻尼器的改善2 . 利用驅動電路的改善(1) 半步進1-2相激磁
2021-07-07 06:27:00
的步進角,給一個脈沖,它就轉動一個步進角,于是它取名:步進電機第二個問題:步進電機的特性?在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收...
2021-07-08 10:01:44
倍速鏈輸送具有哪些優點?伺服電機和步進電機的控制方式有何區別?伺服電機和步進電機的過載特性有何區別?
2021-10-11 06:31:15
目錄1. 概述2. 硬件設計3. 軟件設計1. 概述步進電機的主要特性:步進電機必須驅動才可以運轉,驅動信號必須為脈沖信號,無脈沖電機靜止,若加入適當的脈沖信號,則會以一定的角度(稱為步角)轉動
2021-09-16 08:25:45
步進電機基礎(8.4)-步進電機的問題解決方案-位置定位精度的解決方法前言基本信息前言說明8.2 位置定位精度的解決方法1 . 驅動電路的改善(1) 額定電壓(電流)驅動:(2) 2相激磁驅動:(3
2021-07-07 07:16:07
步進電機和伺服電機的控制精度有何區別?步進電機和伺服電機的低頻特性有何區別?
2021-09-30 08:23:52
請問一下步進電機有哪些特性呢?
2021-10-27 07:33:08
什么是混合伺服?閉環步進電機的基本特性有哪些?
2021-10-09 06:09:11
步進電機工作原理與編程方法和控制源程序
本文介紹了步進電機的工作原理與編程方法,以及例出
2008-05-22 09:13:48 314
314 摘要:設計一種步進電機驅動電路,使加到電機繞組上的電流信號前后沿較陡,降低了開關損耗,改善了電機的高頻特性,同時具有多種保護功能.實驗證明,該驅動電路簡單、
2008-10-21 00:50:13122 單相永磁步進電機特性的數值計算與分析:介紹了單相步進電機結構簡單控制方便等更多的特點。
2009-04-02 14:50:1023 本文介紹了一種基于Windows下通過程序采用數字I/O卡控制步進電機的方法。
2009-04-02 16:07:1634 提出了一種基于PLC的四相步進電機控制的方法,介紹了控制系統的設計方案及其軟硬件的實現方法。實現對四相步進電機的轉速控制、正反轉控制、以及步數控制。提出設計總體方
2009-08-11 11:14:5089 步進電機是一種易于精確控制的電機,由于其良好的性能而受到廣泛的應用。其控制方法也多種多樣。介紹了8051系列單片機對步進電機的控制方法,并且提出和對比了幾種步進電機
2009-11-07 15:11:00136 闡述了步進電機的驅動原理,介紹了恒流斬波、脈寬調制及細分驅動等步進電機驅動電路的結構設計方法和設計中的相關技術,并給出了實現方案。關鍵詞:步進電機; 恒流斬波; 脈
2010-01-09 13:41:4999 一種微型步進電機的微膠接裝配方法的研究:采用微膠接技術裝配微型步進電機的基體和導軌。對膠粘劑的點膠特性進行實驗,指出微電機膠接裝配中影響膠接質量的兩個關鍵因素是膠
2010-01-10 22:29:3120 提出了一種基于PLC的四相步進電機控制的方法,介紹了控制系統的設計方案及其軟硬件的實現方法。實現對四相步進電機的轉速控制、正反轉控制、以及步數控制。提出設計總體方案
2010-07-21 09:31:1761 步進電機的保持轉矩,近似于傳統電機所稱的“功率”。當然,有著本質的區別。步進電機的物理結構,完全不同于交流、直流電機,步進電機的輸出功率是可變的。
2010-06-12 08:19:261036 步進電機原理,二相八線步進電動機接線方法參考圖及接線介紹。
2015-11-09 16:00:1410 步進電機在51單片機中的應用,適合初學者學習。通過51單片機控制步進電機的方法
2016-02-23 16:51:427 步進電機的精確控制方法研究,有需要 下來看看
2016-05-04 14:35:598 電子、電子信息專業電路單片機學習教程資料——步進電機的精確控制方法研究
2016-08-26 17:02:460 先進的步進電機控制方法
2017-01-23 20:48:1616 單片機控制步進電機的方法研究與應用
2021-11-30 11:55:588 步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器。
2017-06-11 11:34:2931543 直線步進電機,或稱線性步進電機,是由磁性轉子鐵芯通過與由定子產生的脈沖電磁場相互作用而產生轉動,直線步進電機在電機內部把旋轉運動轉化為線性運動。
2017-08-11 18:09:332523 介紹一種基于步進電機驅動系統矩頻特性的“計時”測試理論,研制的步進電機驅動系統矩頻特性測試系統。該系統由自制的整形電路、異或檢相器和MCS8098單片機組成。
2017-08-31 16:08:235 針對以往的文獻主要對個別加減速方法進行分析的問題,對比分析了幾種主要的步進電機加減速控制方法,并給出了具體的數學描述。在結合步進電機矩頻特性的基礎上,指出了各種方法的優缺點。
2017-09-03 10:30:3910 步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器。
2017-11-21 16:28:3636823 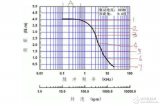
是指在單脈沖、電流不變的情況下,步進電動機的靜轉矩T與轉子失調角θ之間的關系曲線T=f。矩角特性是步進電動機的基本特性,正確而方便地測定這一特性是很重要的,但至今仍感到困難,人們早就想通過旋轉感應電壓,來測出步進電動機的矩角特性。
2017-11-21 16:46:0812317 
等效復現換流閥的實際運行應力。從調節時間、超調量等特性指標分析了試驗電路的暫態特性。證明了試驗回路呈欠阻尼特性,暫態性能不佳,且實際運行時還可能出現振蕩。提出了一種附加虛擬電阻的暫態特性改善方法,實際的運行試
2017-12-15 10:47:096 近年來,受到風電機組電壓異常時運行能力的影響,風電大規模脫網事故時有發生。以雙饋風電機組為研究對象,詳細分析了當機端發生三相對稱零電壓故障、Crowbar保護電路投入后,機組主要電氣量暫態特性的變化
2018-02-10 12:04:126 多軸步進電機插補控制器及多軸步進電機運動控制卡控制方法
2018-04-11 10:24:4726 本文開始介紹了步進電機工作原理,其次介紹了三款步進電機電路圖,最后介紹了步進電機是否有編碼器以及步進電機加編碼器的方法和重要意義。
2018-04-25 12:48:4150524 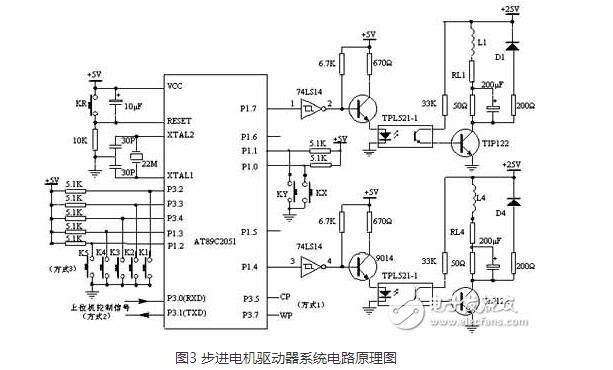
本文開始介紹了步進電機的基本原理,其次介紹了步進電機工作效率以及使步進電機的效率最大化的方法,最后介紹了步進電機選型的步驟與方法。
2018-04-25 14:06:014299 
步進電機主要是依相數來做分類,而其中又以二相、五相步進電機為目前市場上所廣泛采用。二相步進電機每轉最細可分割為400等分,五相則可分割為 1000等分, 所以表現出來的特性以五相步進電機較佳、加減
2018-04-25 17:31:1446736 額定電壓(電流)驅動:參見前文《步進電機的靜態轉矩特性及測量方法》一文的下圖,從額定電壓降低電壓來驅動步進電機,發現位置定位精度變差。
2019-10-07 16:17:002130 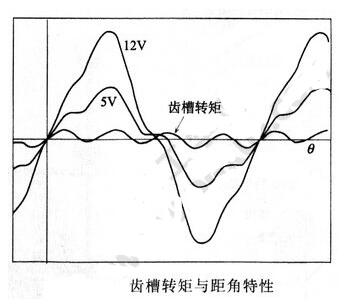
步進電機的線圈通直流電時,帶負載轉子的電磁轉矩(與負載轉矩平衡而產生的恢復電磁轉矩稱為靜態轉矩或靜止轉矩)與轉子功率角的關系稱為角度-靜止轉矩特性,這就是電機的靜態特性。
2019-10-08 15:36:133881 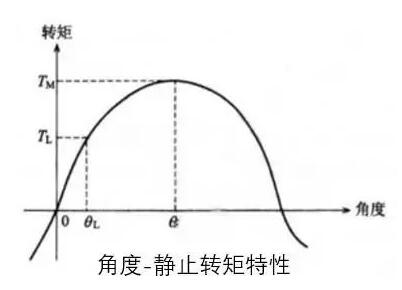
步進電機的線圈通直流電時,帶負載轉子的電磁轉矩(與負載轉矩平衡而產生的恢復電磁轉矩稱為靜態轉矩或靜止轉矩)與轉子功率角的關系稱為角度-靜止轉矩特性,這就是電機的靜態特性。
2019-12-11 09:02:0510552 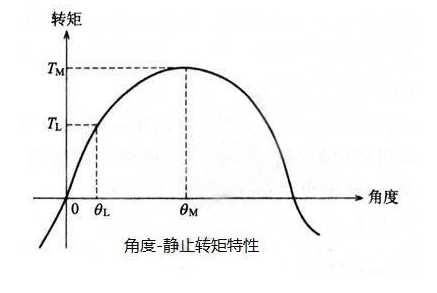
測量暫態特性,縱軸的角度精度要更精確的獲取,電位計用編碼器來代替,其穩定波形可以用打印機輸出。下圖為此測量方法的穩定波形,有兩次衰減振蕩即到達停止角度的±5%內,即到1.8°±5%讀取穩定時間(setting time)。
2019-12-11 09:20:282355 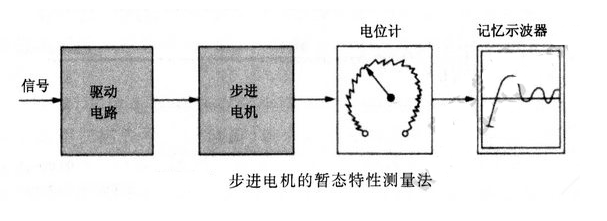
有磁滯渦流效應,在交變磁場中也會發作損耗,其巨細與資料,電流,頻率,電壓有關,這叫鐵損。銅損和鐵損都會以發熱的辦法表現出來,然后影響電機的功率。步進電機通常尋求定位精度和力矩輸出,功率比照低,電流轉常比照大,且諧波成分高,電流交變的頻率也隨轉速而改動,因而步進電機廣泛存在發熱心況,且狀況比通常溝通電機嚴峻。
2020-04-06 16:37:003238 本文主要闡述了步進電機驅動器調速方法及步進電機驅動器的作用。
2020-04-20 09:10:2810074 最簡單的方法是在負載軸上增加一個杠桿,用彈簧秤拉動杠桿,拉力乘以臂的長度就是負載力矩。也可以根據負載特性進行理論計算。由于步進電機是控制型電機,目前常用的步進電機最大轉矩不超過45nm。
2020-08-08 09:19:001579 步進電機和伺服電機的辨別方法如下:力矩范圍:步進電機系統一般為中小力矩(一般在40Nm以下)范圍;伺服電機系統可實現全范圍。
2020-09-11 10:27:178386 步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器。
2021-03-02 17:45:543639 “牽入轉矩特性”也稱為“啟動轉矩特性”,表示可以使停止狀態的步進電機啟動的頻率(脈沖頻率)與負載轉矩之間的關系。牽入轉矩曲線內的區域稱為“自啟動區域”,是可以啟動、停止和反轉的區域。另外,將負載轉矩為零的頻率=可以啟動步進電機的極限頻率稱為“最大自啟動頻率”。如圖所示,頻率越高,可啟動的負載轉矩越低。
2021-06-12 16:27:005566 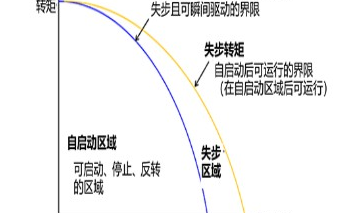
下圖顯示了步進電機的轉矩和速度之間的關系。縱軸為轉矩,橫軸為脈沖頻率。
2021-06-13 17:46:324193 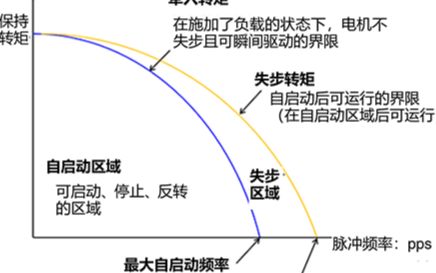
在新開始的“步進電機”篇系列文章中,將介紹步進電機的結構、步進電機的工作原理、步進電機的特性和步進電機的驅動方法。什么是步進電機?步進電機是一種可以與脈沖信號同步準確地控制旋轉角度和轉速的電機,步進電機的也稱為“脈沖電機”。
2023-02-24 09:51:091897 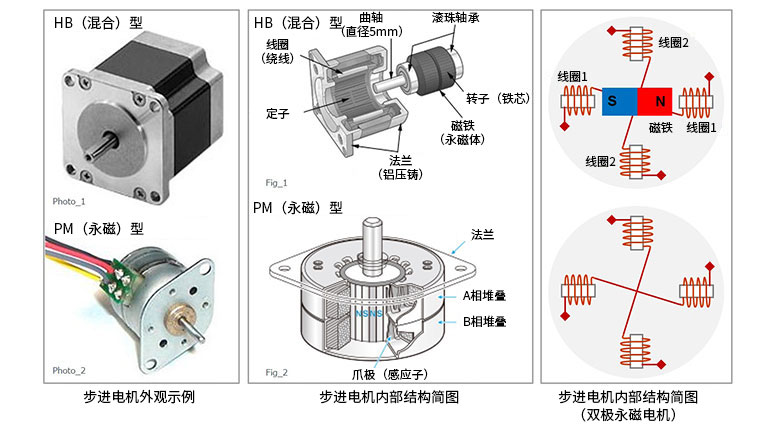
本文將介紹步進電機的基本特性。步進電機的基本特性:下圖顯示了步進電機的轉矩和速度之間的關系。縱軸為轉矩,橫軸為脈沖頻率。
2023-02-24 09:51:101168 
到目前為止,我們已經介紹了步進電機的結構和步進電機的驅動方法。本文在表格中簡要匯總了步進電機的特征及步進電機應用。
2023-02-24 09:51:121006 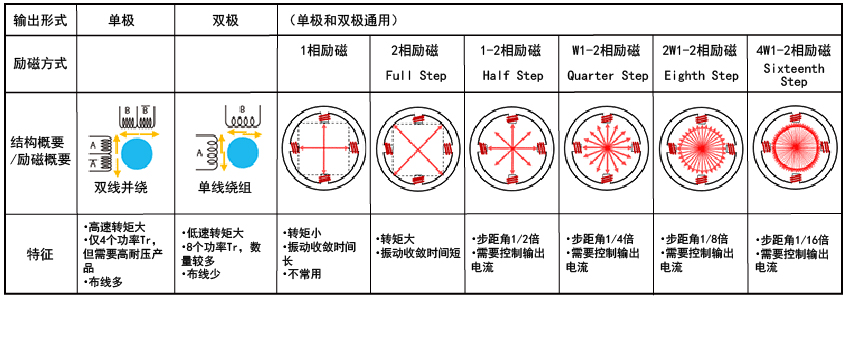
最簡單的步進電機驅動方法是單相雙極驅動方式,也稱為雙相步進驅動方式。該方式只需要使用一個 H橋驅動器和一個脈沖發生器,即可實現步進電機的驅動控制。
2023-03-08 14:21:5612542 步進電機的頻率特性主要指其轉速與輸入脈沖信號頻率之間的關系。由于步進電機的運動是由輸入脈沖信號控制的,因此輸入脈沖信號的頻率會直接影響步進電機的轉速和運動精度。
2023-03-08 14:24:331240 另外,步進電機的牽入轉矩特性和失步轉矩特性會因勵磁方法和驅動電路而異。因此,對步進電機的特性研究中,需要進行包括驅動方法和電路在內的整體評估。
2023-03-09 11:52:28454 
從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅動電路,以及兩相雙極步進電機和兩相單極步進電機的驅動方法。首先介紹雙極連接和單極連接。
2023-03-10 09:14:05783 
基礎參數介紹 轉矩 相、極 步距角、極性 步進方式 四、步進電機特性 矩角特性 靜態特性 靜態穩定區 多拍的矩角特性族動態特性 轉子的震蕩過程 共振現象 共振的解決方案矩頻特性與起動慣頻特性 該文章主要介
2023-03-21 14:32:299 下面從速度-轉矩特性考慮要增加動態轉矩的解決方法。增加轉矩時,根據速度的高低,其解決方法各不相同。而解決方法既有電機方面的,又有驅動電路方面的。
在低速時轉矩隨轉子齒數增加而變大。選擇
2023-03-21 15:03:520 步進電機的基本操作模式稱為 勵磁模式,能夠使步進電機工作在全步模式,半步模式和微步模式,其中微步模式
能夠有效的降低步進電機相電流的噪聲,能夠改善步進電機固有的噪聲震動問題。下面將介紹 3 種勵磁模式。
2023-03-21 10:40:410 現象:步進電機轉速慢的情況下會產生震動
原因:本身的兩個特性:矩頻特性、低頻特性
(1) 矩頻特性: 研控57步進電機 啟動時脈沖頻率過高,電機輸出扭矩較小,負載較重時可能會丟步,從而產生震動
2023-03-22 10:04:340 為增進大家對步進電機的認識,本文將對步進電機的選型步驟以及方法予以介紹。 步進電機是電機諸多類型中的一種,同時也是其中步進電機應用非常廣泛的一種。為增進大家對步進電機的認識,本文將對步進電機的選型
2023-03-22 09:38:333 步進電機基礎(3.2)-步進電機的原理與特性之基本特性 前言 基本信息 公式 前言說明 基本特性 1. 靜態轉矩特性 2. 動態轉矩特性 1) 脈沖頻率-轉矩特性 2) 脈沖頻率-慣量特性3. 暫態
2023-03-23 13:51:012 本章為步進電機的基礎理論,主要講解轉矩是如何產生的?如何用數學公式表示。并且對步進電機的基本特性:靜態特性、動態特性、暫態特性加以說明,以便讀者更好地理解并掌握此三種基 本特性。
步進電機可視
2023-03-23 10:54:3769 為了評估步進電機的特性必須要有必要的測量方法。本章針對步進電機的基本特性①靜態特性:靜態轉矩特性,步進角度精度;②動態特性:速度-轉矩特性;③暫態特件;介紹各種測量方法。并且進一步
說明引起步進電機產生振動和噪音的原因,以及振動和噪音的測量方法。
2023-03-23 10:00:441 步進電機基礎(8.3)-步進電機的問題解決方案-改善暫態特性的解決方法 前言 基本信息 前言說明 8.3 改善暫態特性的解決方法 1. 利用阻尼器的改善 2 . 利用驅動電路的改善 (1) 半步進
2023-03-24 11:05:350 本文將對有刷電機、步進電機及無刷電機的特點、性能和特性進行比較,希望能夠成為大家在選擇電機時的參考。
2023-03-31 11:06:11741 為什么用步進電機來畫畫呢?
因為步進電機的旋轉能精確到1.8°之差,能旋轉到特定的角度
正因為這個特性,用步進電機來畫畫就很準確,不僅如此,在自動化設備中大部分采用的也是步進電機
2023-11-03 10:02:19124 
步進電機的控制方法以及所需的控制信號。 步進電機的控制方法主要分為開環控制和閉環控制兩種。 開環控制是指根據預定的電流和時間控制信號來驅動步進電機,根據電流和時間的確定性,可以較精確地控制電機的角度和速度。開
2023-12-20 11:21:24768 伺服電機和步進電機在控制精度、低頻特性、矩頻特性、過載能力、編碼器類型等方面存在顯著差異。
2024-01-16 10:27:42192 步進電機控制方法 步進電機是一種將電信號轉化為機械轉動的電動機,其輸出轉角是按照電脈沖控制信號的變化而變化的。步進電機的控制方法有幾種常見的方式,包括全步進控制、半步進控制和微步進控制。 全步進控制
2024-01-22 17:18:18318 步進電機正反轉的換線方法 步進電機是一種常見的電機類型,它具有正反轉的能力。換線是指改變步進電機的電源連接方式,以改變其運動方向。換線方法有很多種,下面將詳細介紹其中一種常見的換線方法。 步進電機
2024-01-23 14:45:51663 步進電機丟步的原因和解決方法 步進電機是一種常見的電動機類型,特點是可以實現精確的位置控制和旋轉運動。然而,在實際使用過程中,步進電機有時會出現丟步的現象,即無法按照預定步長準確移動。這種情況可能會
2024-02-01 16:32:47706 等,因此在各種自動化設備和精密儀器中得到廣泛應用。 步進電機的特性曲線圖揭示了其轉矩與脈沖頻率(或稱為驅動頻率)之間的關系。在這張圖中,垂直軸代表轉矩,而水平軸代表脈沖頻率,用每秒脈沖數(pps)來度量。圖表中的藍
2024-02-06 09:33:21228 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論