正常情況下,步進(jìn)電機(jī)轉(zhuǎn)過(guò)的總角度和輸入的脈沖數(shù)成正比;連續(xù)輸入一定頻率的脈沖時(shí),電動(dòng)機(jī)的轉(zhuǎn)速與輸入脈沖的頻率保持嚴(yán)格的對(duì)應(yīng)關(guān)系,不受電壓波動(dòng)和負(fù)載變化的影響。由于步進(jìn)電動(dòng)機(jī)能直接接收數(shù)字量的輸入,所以特別適合于微機(jī)控制。
2020-09-10 16:34:47 8193
8193 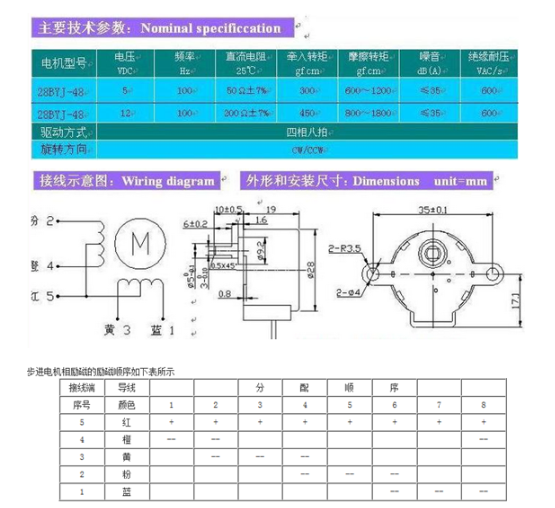
步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制電機(jī),又稱(chēng)為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度。
2023-03-01 09:54:494879 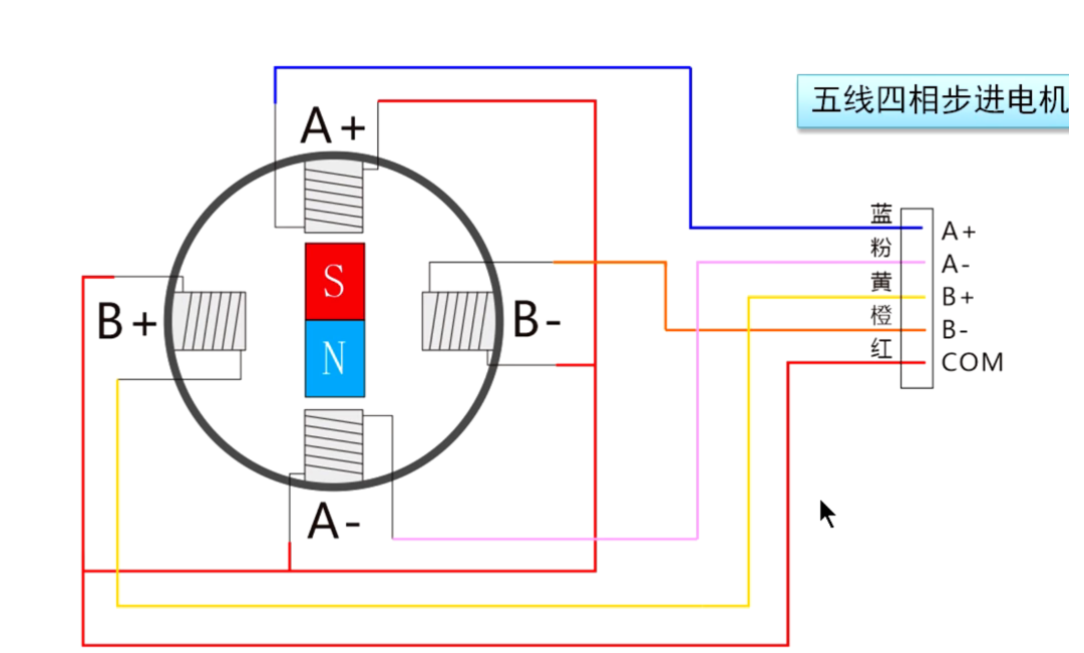
步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制電機(jī),又稱(chēng)為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱(chēng)為“步距角”。
2023-03-14 09:37:213111 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)
2011-10-04 10:52:582908 請(qǐng)教一下!弄了好久就是轉(zhuǎn)不過(guò)這彎。51單片機(jī)驅(qū)動(dòng)步進(jìn)電機(jī)液晶顯示轉(zhuǎn)速。程序用定時(shí)器來(lái)實(shí)現(xiàn)轉(zhuǎn)速檢測(cè),轉(zhuǎn)速是通過(guò)單片機(jī)發(fā)送的脈沖頻率可變的。
2013-02-26 23:43:45
在stm32中,ULN2083能通過(guò)頻率改變步進(jìn)電機(jī)的轉(zhuǎn)速嗎
2013-09-03 13:26:19
步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖頻率步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖頻率成正比,即脈沖頻率越高步進(jìn)電機(jī)的轉(zhuǎn)速也越高,但提高了脈沖頻率雖然達(dá)到了提速作用,卻損失了力矩。力矩隨脈沖頻率升高而下降的原因: 步進(jìn)電機(jī)產(chǎn)生失步的兩個(gè)
2021-07-08 07:15:24
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件,在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖個(gè)數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2021-06-28 08:34:17
現(xiàn)象:步進(jìn)電機(jī)轉(zhuǎn)速慢的情況下會(huì)產(chǎn)生震動(dòng)原因:本身的兩個(gè)特性:矩頻特性、低頻特性(1) 矩頻特性:研控57步進(jìn)電機(jī)啟動(dòng)時(shí)脈沖頻率過(guò)高,電機(jī)輸出扭矩較小,負(fù)載較重時(shí)可能會(huì)丟步,從而產(chǎn)生震動(dòng)。選步進(jìn)電機(jī)
2021-06-28 09:05:38
元件篇:步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)
2021-09-01 08:06:40
步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)傳動(dòng)器接收到一個(gè)脈沖信號(hào)
2021-07-08 08:16:34
步進(jìn)電機(jī)是將電脈沖信號(hào)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載情況下,電機(jī)的轉(zhuǎn)速,停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。這一線性關(guān)系
2021-07-07 07:20:28
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號(hào)的頻率和脈沖數(shù)。脈沖數(shù)越多,電機(jī)轉(zhuǎn)動(dòng)的角度越大。脈沖的頻率越高,電機(jī)轉(zhuǎn)速越快
2021-09-06 07:47:08
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、 停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī) 則轉(zhuǎn)過(guò)一個(gè)步距
2021-09-07 08:43:04
一般在步進(jìn)電機(jī)的書(shū)里面說(shuō)的大多是這樣的:隨著步進(jìn)電機(jī)的脈沖頻率增大,轉(zhuǎn)矩變小。但是都沒(méi)有具體說(shuō)數(shù)學(xué)關(guān)系,有沒(méi)有公式之類(lèi)的描述?
2016-01-18 09:34:00
何為步進(jìn)電機(jī)和步進(jìn)驅(qū)動(dòng)器?步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖頻率的關(guān)系是什么?細(xì)分步進(jìn)驅(qū)動(dòng)器有何優(yōu)點(diǎn)?
2021-10-28 08:04:59
步進(jìn)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩是什么關(guān)系?轉(zhuǎn)速高低對(duì)轉(zhuǎn)矩的影響?
2023-12-12 07:00:21
1 步進(jìn)電機(jī)原理1.1 步進(jìn)電機(jī)簡(jiǎn)介步進(jìn)電機(jī)是將輸入的電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的元件。在不超負(fù)載運(yùn)作的情況下,電機(jī)的轉(zhuǎn)速以及停止的位置只取決于脈沖的個(gè)數(shù)和脈沖的頻率。脈沖數(shù)越多,電機(jī)的角位移
2021-07-07 08:06:42
一、前言步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件,在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)
2021-07-08 07:57:57
,減速時(shí)的脈沖頻率需要逐漸減低。這就是我們常說(shuō)的“加減速”方法。步進(jìn)電機(jī)轉(zhuǎn)速度是根據(jù)輸入的脈沖信號(hào)的變化來(lái)改變的,從理論上講,給驅(qū)動(dòng)器一個(gè)脈沖,步進(jìn)電機(jī)就旋轉(zhuǎn)一個(gè)步距角(細(xì)分時(shí)為一個(gè)細(xì)分步距角)。實(shí)際上
2016-01-11 15:02:13
一、步進(jìn)電機(jī)相關(guān)概念 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù)。 角位移:角位移就是步進(jìn)電機(jī)的轉(zhuǎn)軸轉(zhuǎn)動(dòng)行駛的位移。1.步進(jìn)電機(jī)的相、線、極性...
2021-07-07 08:03:19
步進(jìn)電機(jī)簡(jiǎn)介步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖
2021-07-07 07:00:38
與輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。當(dāng)然頻率必須在一定的范圍,頻率太快步進(jìn)電機(jī)無(wú)法運(yùn)作。會(huì)發(fā)出聲響。減速比:1/64,如果步進(jìn)電機(jī)輸出1N.m的轉(zhuǎn)矩的話,通過(guò)減速箱轉(zhuǎn)換后的輸出力矩64N.m.
2021-08-31 09:01:18
步進(jìn)電機(jī)速度不夠怎么辦?如果是實(shí)際轉(zhuǎn)速比理論轉(zhuǎn)速慢,可能是失步,負(fù)載過(guò)大造成的;如果是理論上轉(zhuǎn)速也是慢,那是脈沖頻率低,加大脈沖頻率可提高轉(zhuǎn)速。提高步進(jìn)電機(jī)的轉(zhuǎn)速,有兩個(gè)方法:1. 提高脈沖頻率
2021-07-08 06:43:00
想請(qǐng)問(wèn)大家一個(gè)問(wèn)題:我現(xiàn)在這個(gè)步進(jìn)電機(jī)是兩相,1.8°。電機(jī)驅(qū)動(dòng)器設(shè)置的是800pulse/rev,那么我pmw頻率和電機(jī)轉(zhuǎn)速的關(guān)系是怎么對(duì)應(yīng)的呢(有驅(qū)動(dòng)器細(xì)分的情況下)?我做了一個(gè)實(shí)驗(yàn): 我用
2016-10-10 10:41:03
第一個(gè)圖為控制步進(jìn)電機(jī)轉(zhuǎn)速的程序,實(shí)際上是輸入的頻率(如幫助中所示),只是我通過(guò)換算變成輸入轉(zhuǎn)速。目前是輸入一個(gè)定轉(zhuǎn)速,點(diǎn)擊運(yùn)行后,電機(jī)就在固定轉(zhuǎn)速下運(yùn)行。現(xiàn)在我想令電機(jī)轉(zhuǎn)速按照正弦變化。我將轉(zhuǎn)速
2018-08-05 20:46:23
用lebview怎么測(cè)步進(jìn)電機(jī)的轉(zhuǎn)速求大神幫忙。。。。。
2015-04-28 13:29:38
摘要: 在回答這個(gè)問(wèn)題之前,先來(lái)了解下什么是步進(jìn)電機(jī)和減速電機(jī)? 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率
2021-09-03 07:20:33
的步進(jìn)角,給一個(gè)脈沖,它就轉(zhuǎn)動(dòng)一個(gè)步進(jìn)角,于是它取名:步進(jìn)電機(jī)第二個(gè)問(wèn)題:步進(jìn)電機(jī)的特性?在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收...
2021-07-08 10:01:44
位移的開(kāi)環(huán)控制電機(jī),又稱(chēng)為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定...
2021-07-07 06:55:49
公司的一個(gè)客戶(hù)自己選的伺服電機(jī)6.9KW,額定轉(zhuǎn)矩22N.m,他說(shuō)伺服電機(jī)在50Hz和60Hz的情況下輸出轉(zhuǎn)速都1800r/min,這個(gè)我不能理解,輸出轉(zhuǎn)速和頻率是什么關(guān)系?本人對(duì)伺服不懂,三相交流電機(jī)
2023-03-16 10:50:33
的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號(hào)的頻率和脈沖數(shù)。脈沖數(shù)越多,電機(jī)轉(zhuǎn)動(dòng)的角度越大。脈沖的頻率越高,電機(jī)轉(zhuǎn)速越快,但不能超過(guò)最高頻率,否則電機(jī)的力矩迅速減小,電機(jī)不轉(zhuǎn)。反應(yīng)式:轉(zhuǎn)...
2021-07-08 07:37:12
可以通過(guò)調(diào)節(jié)頻率來(lái)調(diào)節(jié)步進(jìn)電機(jī)的轉(zhuǎn)速嗎?占空比對(duì)于步進(jìn)電機(jī)有什么意義呢?如何利用PWM模塊來(lái)調(diào)節(jié)步進(jìn)電機(jī)不同的轉(zhuǎn)速?
2021-12-20 07:48:55
繼續(xù)繼續(xù)。步進(jìn)電機(jī)轉(zhuǎn)速控制一、任務(wù)在SMSpeed.DSN的電路上實(shí)現(xiàn):當(dāng)KEY2按下時(shí),電機(jī)停止轉(zhuǎn)動(dòng),釋放時(shí)繼續(xù)轉(zhuǎn)動(dòng)。當(dāng)KEY1按下時(shí),電機(jī)以60轉(zhuǎn)/min的轉(zhuǎn)速正轉(zhuǎn),釋放時(shí)以120轉(zhuǎn)/min
2021-07-08 09:49:46
如何控制步進(jìn)電機(jī)速度,假定設(shè)置為四細(xì)分?jǐn)?shù),電機(jī)轉(zhuǎn)一圈所需要的脈沖數(shù)即為800個(gè),要實(shí)現(xiàn)步進(jìn)電機(jī)600轉(zhuǎn)/分的轉(zhuǎn)速,上位機(jī)應(yīng)該發(fā)送的脈沖頻率計(jì)算方法:頻率的概念是一秒鐘的時(shí)間發(fā)送的脈沖個(gè)數(shù)所以,先計(jì)算
2021-07-08 08:20:45
一,步進(jìn)電機(jī)的介紹1,步進(jìn)電機(jī)是將電脈沖信號(hào)(改變頻率)轉(zhuǎn)變?yōu)榻俏灰苹蛘呔€位移的開(kāi)環(huán)元件 ,一個(gè)脈沖就轉(zhuǎn)一個(gè)角度;在非超載的情況下,電機(jī)的轉(zhuǎn)速只取決于 脈沖信號(hào)頻率和脈沖數(shù)2,步進(jìn)電機(jī)的步距角,一個(gè)
2021-07-08 10:00:28
1.步進(jìn)電機(jī)圖片2.步進(jìn)電機(jī)介紹步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)
2021-07-07 08:02:04
一、步進(jìn)電機(jī)簡(jiǎn)要原理1.步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。2.非超載時(shí),電機(jī)轉(zhuǎn)速、轉(zhuǎn)過(guò)的角度取決于脈沖信號(hào)的頻率和脈沖數(shù)。3.線性關(guān)系:給電機(jī)施加一個(gè)脈沖,電機(jī)轉(zhuǎn)過(guò)一個(gè)步距角
2021-06-28 08:24:37
步進(jìn)電機(jī)的轉(zhuǎn)速測(cè)試介紹:本文介紹了步進(jìn)電機(jī)的轉(zhuǎn)速測(cè)試系統(tǒng)的組成、工作原理等。
步進(jìn)電動(dòng)機(jī)或稱(chēng)脈沖電動(dòng)機(jī),是一種輸入脈沖信號(hào)轉(zhuǎn)換成輸出軸的角位移(或直線位移)
2009-04-02 11:19:38 66
66 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電
2010-01-13 09:00:06166 摘要:步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,
2010-08-24 15:04:55109 電機(jī)功率和轉(zhuǎn)速的關(guān)系:P=T×n/9550其
2010-10-22 16:40:490 步進(jìn)電機(jī) 是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加
2011-07-02 15:39:360 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制電機(jī)。在未發(fā)生失步情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù)并不受負(fù)載變化的影響,當(dāng)步進(jìn)電機(jī)接收到一個(gè)脈沖信號(hào)時(shí),電機(jī)就按設(shè)定
2016-08-29 18:59:592380 
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。
2017-06-11 09:20:52134666 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。
2017-06-11 09:36:2815097 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。
2018-07-10 01:23:001788 步進(jìn)電機(jī)是一種將脈沖信號(hào)變換成角位移的數(shù)字電磁執(zhí)行裝置。步進(jìn)電機(jī)的角位移與輸入脈沖個(gè)數(shù)成正比,其轉(zhuǎn)速與脈沖頻率成正比,其轉(zhuǎn)向與脈沖分配到步進(jìn)電機(jī)的各相繞組的相序有關(guān)。由于步進(jìn)電機(jī)的轉(zhuǎn)角、轉(zhuǎn)速和轉(zhuǎn)向均可采用數(shù)字量(脈沖)控制,故步進(jìn)電機(jī)廣泛應(yīng)用于數(shù)字伺服領(lǐng)域。
2017-10-13 14:46:5120 步進(jìn)電機(jī)的調(diào)速一般是改變輸入步進(jìn)電機(jī)的脈沖的頻率來(lái)實(shí)現(xiàn)步進(jìn)電機(jī)的調(diào)速,因?yàn)?b class="flag-6" style="color: red">步進(jìn)電機(jī)每給一個(gè)脈沖就轉(zhuǎn)動(dòng)一個(gè)固定的角度,這樣就可以通過(guò)控制步進(jìn)電機(jī)的一個(gè)脈沖到下一個(gè)脈沖的時(shí)間間隔來(lái)改變脈沖的頻率,延時(shí)
2018-04-25 16:09:1224752 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的執(zhí)行機(jī)構(gòu)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。這一線性關(guān)系
2018-11-27 07:48:004171 
步進(jìn)電機(jī)產(chǎn)生共振是因?yàn)?b class="flag-6" style="color: red">電機(jī)接收的脈沖頻率等于步進(jìn)電機(jī)的固有頻率,該頻率與驅(qū)動(dòng)器的細(xì)分有關(guān)系。
2018-09-14 08:43:009061 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)
2018-09-29 08:00:0016 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2019-07-31 17:35:0016 脈沖是指電機(jī)線圈電平從高到低,或者從低到高的一個(gè)周期,轉(zhuǎn)換幾個(gè)周期就是幾個(gè)脈沖,頻率就是一秒內(nèi)轉(zhuǎn)換的次數(shù),而不是指一秒鐘內(nèi)的通電次數(shù)。假如plc發(fā)送的脈沖信號(hào)頻率為50HZ,是指步進(jìn)電機(jī)執(zhí)行脈沖數(shù)的速度是一秒鐘內(nèi)50個(gè)周期。
2020-06-25 17:22:005544 P110C操控3臺(tái)步進(jìn)電機(jī)電路圖如下:FREO向步進(jìn)電機(jī)操控器每輸出一個(gè)脈沖,1號(hào)步進(jìn)電機(jī)就轉(zhuǎn)必定的視點(diǎn),脈沖頻率高,步進(jìn)電機(jī)轉(zhuǎn)速高,脈沖頻率低,步進(jìn)電機(jī)轉(zhuǎn)速低,無(wú)脈沖輸出步進(jìn)電機(jī)停轉(zhuǎn)。POOO操控步進(jìn)電機(jī)的翻滾方向,POOO輸出高電平,步進(jìn)電機(jī)正轉(zhuǎn),POOO輸出低電平,步進(jìn)電機(jī)回轉(zhuǎn)。
2020-10-03 17:40:002125 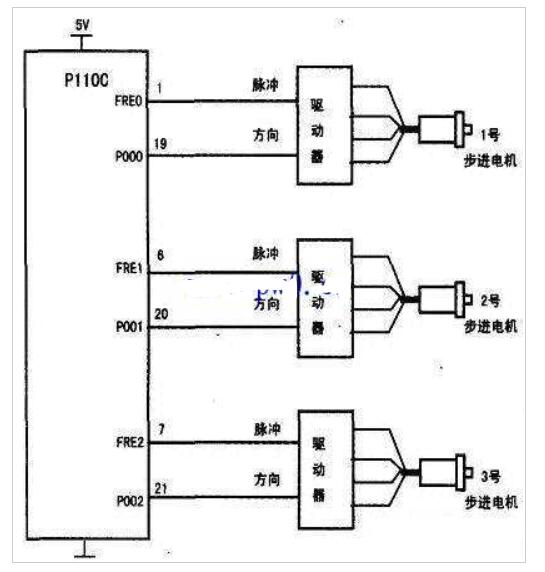
本文小編簡(jiǎn)單說(shuō)下變頻器頻率超出對(duì)電機(jī)轉(zhuǎn)速的影響。
2020-12-14 22:01:336469 本文小編簡(jiǎn)單說(shuō)下變頻器頻率超出對(duì)電機(jī)轉(zhuǎn)速的影響。
2021-04-09 06:08:26136 下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2021-06-13 17:46:324193 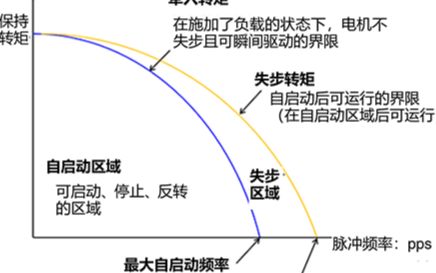
電機(jī)的電壓和頻率都有專(zhuān)門(mén)的設(shè)計(jì)。對(duì)于變頻器而言,低速時(shí)轉(zhuǎn)矩高;對(duì)于電機(jī)而言,若通過(guò)減速機(jī)計(jì)算扭矩時(shí),要考慮齒輪傳動(dòng)效率損失的因素。低速時(shí)轉(zhuǎn)矩越高,轉(zhuǎn)矩和轉(zhuǎn)速的乘積的k倍等于功率,也就是說(shuō),功率一定的時(shí)候,轉(zhuǎn)速與轉(zhuǎn)矩成反比關(guān)系。
2021-10-01 09:20:0038365 ,所謂步進(jìn)電機(jī),就是根據(jù)控制信號(hào)運(yùn)動(dòng),一個(gè)脈沖信號(hào)首先說(shuō)到步進(jìn)電機(jī)轉(zhuǎn)速,那就必須得說(shuō)到步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的一些原理。通過(guò)調(diào)節(jié)輸入驅(qū)動(dòng)器的脈沖頻率以及驅(qū)動(dòng)器的細(xì)分參數(shù)來(lái)達(dá)到調(diào)節(jié)步進(jìn)電機(jī)轉(zhuǎn)速,實(shí)際是控制單位時(shí)間內(nèi)步進(jìn)電機(jī)
2021-09-22 15:46:524200 旋轉(zhuǎn)磁場(chǎng)的轉(zhuǎn)速在電動(dòng)機(jī)實(shí)際運(yùn)行過(guò)程中只與磁極對(duì)數(shù)有關(guān),我國(guó)規(guī)定標(biāo)準(zhǔn)電源頻率為f=50周/秒,所以磁極對(duì)數(shù)多,旋轉(zhuǎn)磁場(chǎng)的轉(zhuǎn)數(shù)成就低。一般情況下,由于轉(zhuǎn)差率的存在,電機(jī)實(shí)際轉(zhuǎn)速略低于旋轉(zhuǎn)磁場(chǎng)的轉(zhuǎn)速,旋轉(zhuǎn)磁場(chǎng)的轉(zhuǎn)速n=3000。
2021-10-09 11:25:0618993 1.步進(jìn)電機(jī)圖片2.步進(jìn)電機(jī)介紹步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)
2021-11-13 15:06:0510 的步進(jìn)角,給一個(gè)脈沖,它就轉(zhuǎn)動(dòng)一個(gè)步進(jìn)角,于是它取名:步進(jìn)電機(jī)第二個(gè)問(wèn)題:步進(jìn)電機(jī)的特性?在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收...
2021-11-20 10:51:0520 步進(jìn)電機(jī)是將電脈沖信號(hào)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載情況下,電機(jī)的轉(zhuǎn)速,停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。這一線性關(guān)系
2021-12-27 19:29:239 1 步進(jìn)電機(jī)原理1.1 步進(jìn)電機(jī)簡(jiǎn)介步進(jìn)電機(jī)是將輸入的電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的元件。在不超負(fù)載運(yùn)作的情況下,電機(jī)的轉(zhuǎn)速以及停止的位置只取決于脈沖的個(gè)數(shù)和脈沖的頻率。脈沖數(shù)越多,電機(jī)的角位移
2022-01-17 10:32:256 步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制電機(jī),在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。步進(jìn)電機(jī)的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行
2022-10-09 09:34:081071 本文將介紹步進(jìn)電機(jī)的基本特性。步進(jìn)電機(jī)的基本特性:下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2023-02-24 09:51:101168 
步進(jìn)電機(jī)的頻率特性主要指其轉(zhuǎn)速與輸入脈沖信號(hào)頻率之間的關(guān)系。由于步進(jìn)電機(jī)的運(yùn)動(dòng)是由輸入脈沖信號(hào)控制的,因此輸入脈沖信號(hào)的頻率會(huì)直接影響步進(jìn)電機(jī)的轉(zhuǎn)速和運(yùn)動(dòng)精度。
2023-03-08 14:24:331240 步進(jìn)電機(jī)轉(zhuǎn)速慢可能有多種原因,常見(jiàn)的原因包括:
電機(jī)驅(qū)動(dòng)信號(hào)不穩(wěn)定或者脈沖頻率低:這種情況下,可以通過(guò)提高脈沖頻率或者改善電機(jī)驅(qū)動(dòng)信號(hào)的穩(wěn)定性來(lái)提高電機(jī)的轉(zhuǎn)速。
電機(jī)的負(fù)載較大
2023-03-08 14:55:476262 步進(jìn)電機(jī)的旋轉(zhuǎn)速度可以通過(guò)控制脈沖信號(hào)的頻率和電機(jī)驅(qū)動(dòng)方式來(lái)實(shí)現(xiàn)。
脈沖頻率控制:步進(jìn)電機(jī)的旋轉(zhuǎn)速度與脈沖信號(hào)的頻率成正比,因此可以通過(guò)調(diào)整脈沖信號(hào)的頻率來(lái)控制電機(jī)的旋轉(zhuǎn)速度。一般來(lái)說(shuō)
2023-03-08 17:03:123337 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱(chēng)為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無(wú)需使用位置傳感器僅通過(guò)開(kāi)環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321228 
步進(jìn)電機(jī)每輸入一個(gè)脈沖信號(hào),轉(zhuǎn)子就轉(zhuǎn)動(dòng)一個(gè)角度或前進(jìn)一步,其輸出的角度輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。它的驅(qū)動(dòng)方式也比普通的有刷直流電機(jī)復(fù)雜。 本節(jié)我們就來(lái)講講步進(jìn)電機(jī)最基礎(chǔ)的驅(qū)動(dòng)方式
2023-03-16 09:28:426 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖
信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)
2023-03-16 09:42:590 與脈沖頻率成正比。因此,步進(jìn)電動(dòng)機(jī)又稱(chēng)脈沖電動(dòng)機(jī)。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。
2023-03-21 15:26:360 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的
影響,即給電機(jī)一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)
2023-03-21 14:17:360 控制。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。即,給電機(jī)加一個(gè)脈 沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。由于這一線性關(guān)系的存在,加上步進(jìn)電機(jī)只有周期性
2023-03-21 13:49:050 步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制電機(jī),又稱(chēng)為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不
受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱(chēng)為“步距角”。
2023-03-21 15:20:551 在不超載的情況下電機(jī)的轉(zhuǎn)速和停止位置只取決于脈沖信號(hào)的頻率和數(shù)量;并且步進(jìn)電機(jī)的脈沖與步進(jìn)旋轉(zhuǎn)的角度成正比,脈 沖的頻率與步進(jìn)的轉(zhuǎn)速成正比。
通過(guò)改變定子的電流比例,改變轉(zhuǎn)子在一個(gè)整步中的不同位
2023-03-21 14:28:070 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一- 個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)
2023-03-21 11:01:202 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖
信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)
2023-03-22 10:52:410 步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。
步進(jìn)電機(jī)收到一個(gè)脈沖,步進(jìn)電機(jī)走一個(gè)步距角。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號(hào)的頻率和脈沖
2023-03-22 10:42:590 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制電機(jī),電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),
當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度
2023-03-22 11:32:550 現(xiàn)象:步進(jìn)電機(jī)轉(zhuǎn)速慢的情況下會(huì)產(chǎn)生震動(dòng)
原因:本身的兩個(gè)特性:矩頻特性、低頻特性
(1) 矩頻特性: 研控57步進(jìn)電機(jī) 啟動(dòng)時(shí)脈沖頻率過(guò)高,電機(jī)輸出扭矩較小,負(fù)載較重時(shí)可能會(huì)丟步,從而產(chǎn)生震動(dòng)
2023-03-22 10:04:340 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取
決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)
2023-03-23 11:45:104 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信
號(hào),電機(jī)則轉(zhuǎn)過(guò)
2023-03-23 13:45:462 步距角:在一個(gè)脈沖驅(qū)動(dòng)一步的情況下(驅(qū)動(dòng)器細(xì)分?jǐn)?shù)為1時(shí)),即一個(gè)脈沖驅(qū)動(dòng)一步進(jìn)角,也就是一個(gè)脈沖周期,電機(jī)轉(zhuǎn)
動(dòng)一個(gè)步距角。
當(dāng)細(xì)分?jǐn)?shù)成倍增加時(shí),那么就需要相應(yīng)成倍的脈沖來(lái)驅(qū)動(dòng)一步進(jìn)角;相應(yīng)
2023-03-23 11:39:460 步進(jìn)頻率脈沖信號(hào)包括若干個(gè)脈沖,每個(gè)脈沖的工作頻率是在中心頻率基礎(chǔ)上以均勻步進(jìn),且每個(gè)子脈沖可以是單載頻脈沖,也可以是頻率調(diào)制脈沖。
2023-04-19 15:46:442358 
機(jī)電設(shè)備中有的地方用的伺服電機(jī)。有的地方用的是步進(jìn)電機(jī),價(jià)格是相差很遠(yuǎn)的。
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件,在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于
2023-05-04 15:32:06895 
步進(jìn)電機(jī),就是根據(jù)控制信號(hào)運(yùn)動(dòng),一個(gè)脈沖信號(hào)首先說(shuō)到步進(jìn)電機(jī)轉(zhuǎn)速,那就必須得說(shuō)到步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的一些原理。通過(guò)調(diào)節(jié)輸入驅(qū)動(dòng)器的脈沖頻率以及驅(qū)動(dòng)器的細(xì)分參數(shù)來(lái)達(dá)到調(diào)節(jié)步進(jìn)電機(jī)轉(zhuǎn)速,實(shí)際是控制單位時(shí)間內(nèi)
2023-06-12 17:20:182396 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。每輸入一個(gè)脈沖信號(hào),轉(zhuǎn)子就轉(zhuǎn)動(dòng)一個(gè)角度或前進(jìn)一步,其輸出的角位移或線位移與輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。因此,步進(jìn)電動(dòng)機(jī)又稱(chēng)脈沖電動(dòng)機(jī)
2023-07-04 13:58:04485 
常見(jiàn)的步進(jìn)電機(jī)轉(zhuǎn)速取決于具體的步進(jìn)電機(jī)型號(hào)和應(yīng)用需求。以下是一些常見(jiàn)的步進(jìn)電機(jī)轉(zhuǎn)速范圍: 通常情況下,步進(jìn)電機(jī)的轉(zhuǎn)速在幾十到幾百轉(zhuǎn)/分鐘之間。這個(gè)范圍適用于許多一般工業(yè)應(yīng)用,如自動(dòng)化設(shè)備、印刷機(jī)
2023-08-24 08:35:022848 步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動(dòng),這種裝置就是步進(jìn)電機(jī)驅(qū)動(dòng)器,它是把控制系統(tǒng)發(fā)出的脈沖信號(hào),加以放大以驅(qū)動(dòng)步進(jìn)電機(jī)。步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號(hào)的頻率成正比,控制步進(jìn)電機(jī)脈沖信號(hào)的頻率,可以對(duì)電機(jī)精確調(diào)速;控制步進(jìn)脈沖的個(gè)數(shù),可以對(duì)電機(jī)精確定位。
2023-10-19 10:59:42262 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論