 電子發燒友App
電子發燒友App


無刷直流電動機也稱為電子換向電動機,顧名思義,BLDC 也是直流供電的。主要特點是 BLDC 電機不使用電刷,而是電子換向。
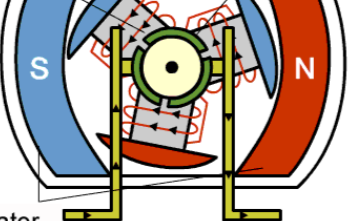
BLDC 有一個帶有永磁體的轉子和一個帶有繞組的定子。它本質上是一個內外翻轉的直流電機。電刷和換向器已被取消,繞組連接到控制電子設備。控制電子設備取代換向器的功能,同時為適當的繞組供電。
通過去除電刷和機械換向,我們消除了火花,這是 BLDC 電機的優勢之一。BLDC 可能更清潔、更快、噪音更小、效率更高、更可靠,但確實需要電子控制。
本文討論了微控制器運行高效 BLDC 電機控制算法所需的主要特性,并介紹了 Kinetis 系列 MCU 如何實現這些特性(以及如何使用它們)。還提到了 Kinetis 技術進行電機控制的理想應用。
簡要介紹了電子電機控制,但建議了解 BLDC 電機控制的基本知識。
電子電機控制的好處
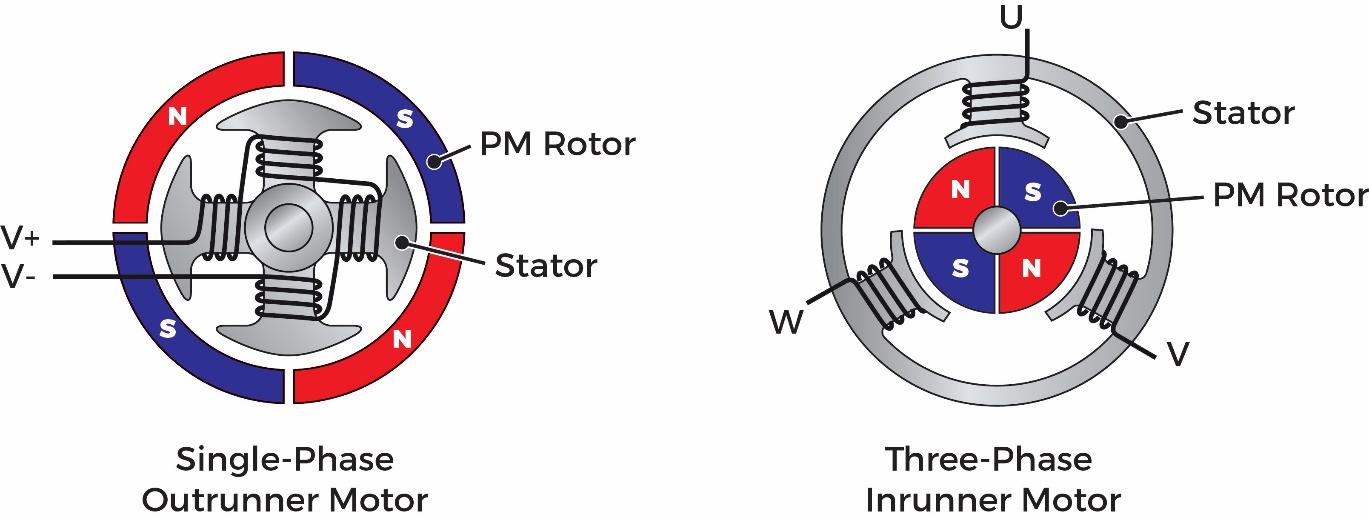
使用先進的電機控制技術和三相無刷電機,與簡單或無控制的單相電機相比,為產品的最終應用和支撐結構提供了多種好處。無刷電機比有刷電機效率高得多,最明顯的原因是電刷在轉子上施加寄生扭矩(浪費的能量)。刷子的其他問題是:扭矩故障、可聽見的噪音、機械磨損。另一方面,可以控制無刷電機以獲得低噪音和平坦的扭矩響應。沒有刷子也意味著更少的維護需求(刷子磨損并需要更換)。相同功率和尺寸空間的無刷電機也將比有刷電機運行得更快。
無刷電機還允許設計有刷電機難以或不切實際的電機外形,例如:“煎餅”電機,一種開始在洗衣機和泵中使用的扁平電機,以及帶有“外部”轉子(轉子的永磁體位于定子繞組的外部而不是內部)。
典型的 BLDC 電機控制系統
與任何控制系統一樣,典型的電機控制系統將包括一個控制或“輸出”部分和一個反饋或“輸入”部分。在典型的電機控制系統中,抽象表示如下。
?
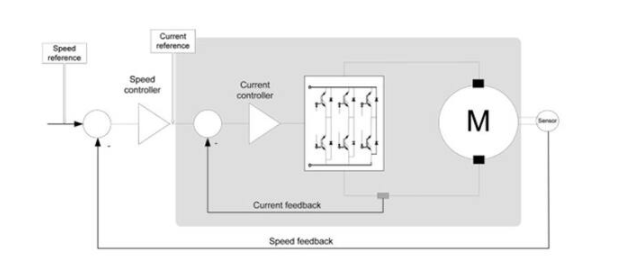
圖 1:簡化的電機控制系統
基本要素是:
功率放大器(可以從單個電源開關到由 6 個功率晶體管制成的三相逆變器)。
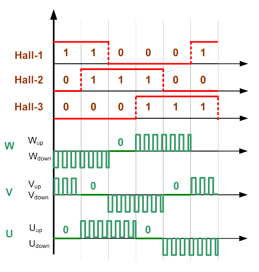
每個感測變量的反饋:在電機控制系統中,最基本的反饋是速度(或位置,可以從中獲得速度)。速度/位置傳感器有多種形式。在 BLDC 系統中,最典型的傳感器是霍爾效應傳感器,每個相位一個,這些傳感器用于確定轉子何時移動了一步,移動發生的時間段用于確定電機的速度。進入電機的電流是另一個重要變量,在 DC 和 BLDC 電機中,電流與電機扭矩直接相關,在正弦電機中,它也與扭矩有關,但不是線性關系。在這些電機中,它也是一種重要的反饋方法,在磁場定向控制 (FOC) 技術中,它是一個基本變量。請注意,有一些方法可以在沒有傳感器的情況下估計轉子的位置,
速度和電流(扭矩)參考:這是定義預期輸出的用戶或系統輸入。這些可以是 HMI 中用戶的直接設置,也可以是來自另一臺計算機或系統通過串行通信鏈路的自動控制。
速度和電流控制器:在基于 MCU 的電機控制中,這些模塊通常由軟件組成。高級 DSP 控制器和帶有 DSP 協處理器的 MCU(例如 Kinetis MCU 中的 ARM? CortexTM-M4 內核)可以幫助進行執行控制功能所需的數學計算。電機系統中最典型的控制形式是 PI(比例 - 積分)。通常不使用 PID 控制器,因為 D 項(導數)會使系統容易受到高頻噪聲的影響。D 項的優點是提高對輸入快速變化的響應,因為電機是緩慢的機械過程(與其他可控變量相反),并且電機緩慢啟動以避免電流峰值,適應快速變化的優勢確實沒有幫助。
BLDC電機控制系統
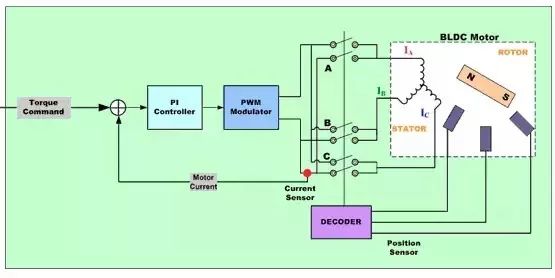
BLDC 電機控制是一個三相系統。圖 1 中的圖表需要更多細節來全面解釋 BLDC 電機控制系統。
?
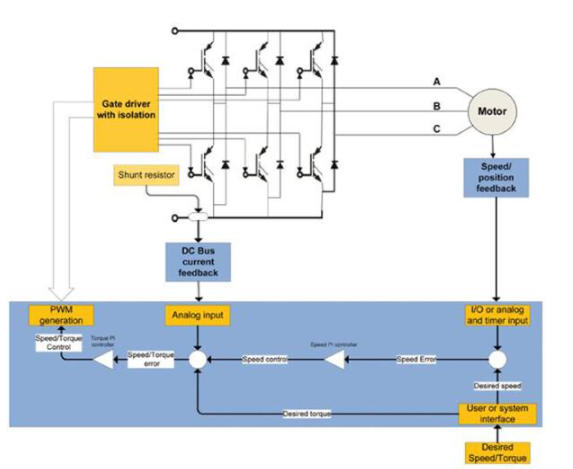
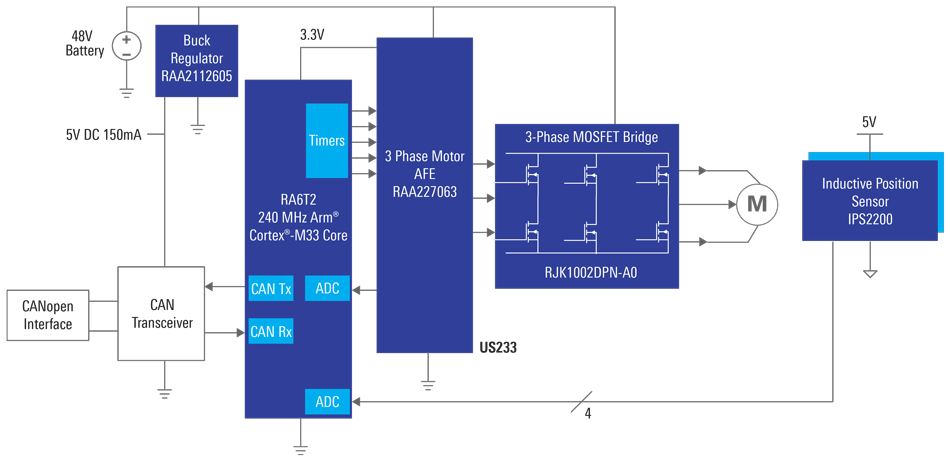
圖 2:BLDC 控制框圖
請注意,這種塊級表示適用于有傳感器和無傳感器 BLDC 電機控制器。主要區別在于速度反饋和輸入部分。典型的傳感 BLDC 應用將使用三個霍爾效應傳感器作為速度/位置反饋,控制器只需要輸入引腳和一個定時器來檢測開關模式和開關周期。另一方面,無傳感器算法將測量在特定時刻未被驅動的電機相位產生的 BEMF(反電磁力)電壓,以測量該電壓的變化率并推斷電機基于該測量的速度。這需要一個 ADC 或模擬比較器和一個定時器,以及一些更復雜的代碼。在以下部分中,將討論 Kinetis MCU 的外設解決此問題的方式。
軟件組件
保持電機和控制器運行的軟件具有特定特性,在某些情況下,這些特性僅在控制系統中常見。下圖顯示了有傳感器和無傳感器 BLDC 電機控制系統中最重要的組件。
?
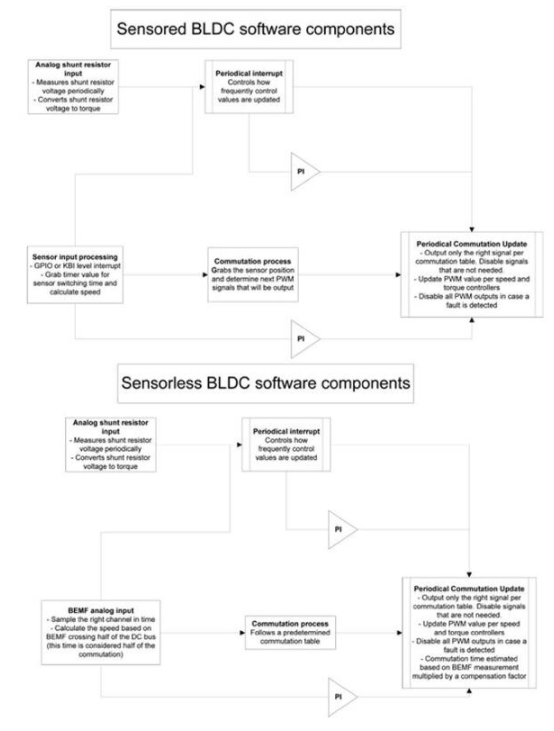
圖 3:傳感 BLDC 應用中的典型軟件組件
從上圖中有幾點需要指出:
模擬輸入:模擬輸入需要足夠快的采樣速度,以便數據在采樣周期內可用。這在無傳感器 BLDC 應用中非常關鍵,在這些應用中,至少每個 PWM 脈沖都需要可用數據來精確確定過零發生的時間。請注意下面的數字。第一個是通常用于測量 BLDC 電機 BEMF 的信號的示波器屏幕截圖。可以注意到,由于 PWM 信號對其他相位的影響,信號是有噪聲的。信號需要在特定時刻進行采樣,與 PWM 信號同步,使過零檢測信號準確且可重復(如下圖所示)
?
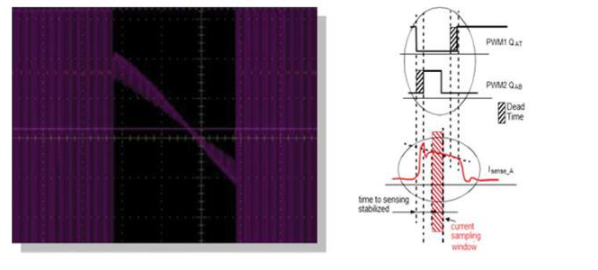
圖 4:BEMF 信號和同步采樣窗口
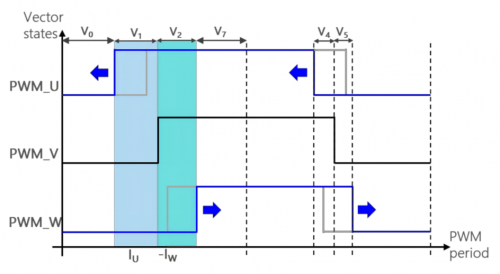
PWM 信號換向:BLDC 電機控制中的一個重要過程是換向,打開和關閉正確的組合輸出以創建用于 BLDC 電機控制的 6 步換向序列。除了需要一個 6 輸出 PWM 模塊外,BLDC 電機控制系統還需要能夠打開和關閉 PWM 信號(用于換向)。因此,進入電機的開關模式不會出現毛刺,開關不應干擾或影響 PWM 信號(與換向模式異步)。周期性的毛刺會轉化為不均勻的扭矩甚至是可聽見的噪音。
數學運算:有幾個數學過程會定期發生。其中最密集的是 PI 控制器。為了保持一致的輸出,PWM 信號必須定期更新,它們的刷新率提高了控制的準確性,這意味著如果 PI 控制器執行得更頻繁,給定一個經過適當校準和表征的系統,結果會好很多。求解 PI 控制器所需的操作通常是 CPU 密集型的,并且由幾個點積操作組成。這些操作在典型的 CPU 內核中傳統上很慢,因此優化算法和專門為數字信號控制和處理而設計的指令,例如一次執行多個操作或從多個來源獲取數據,
延遲:上述過程不能在確切的時間或恰好在另一個之后發生。他們需要定時。在普通的 MCU 中,這會發生使用定時器,手動打開和關閉定時器。這種在每個控制周期同步定時器的過程加起來很長,當達到最高速度并且切換發生在非常快的周期時,它就成為一個特殊的問題。硬件輔助延遲和觸發器通過卸載 CPU 來提高電機控制器的效率。下圖突出顯示了一個例子。
?
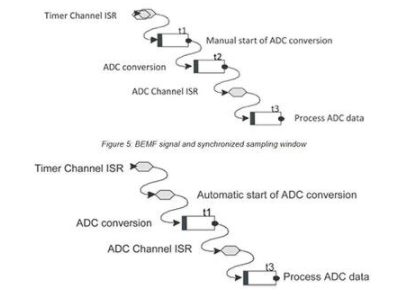
圖 5:BEMF 信號和同步采樣窗口
?
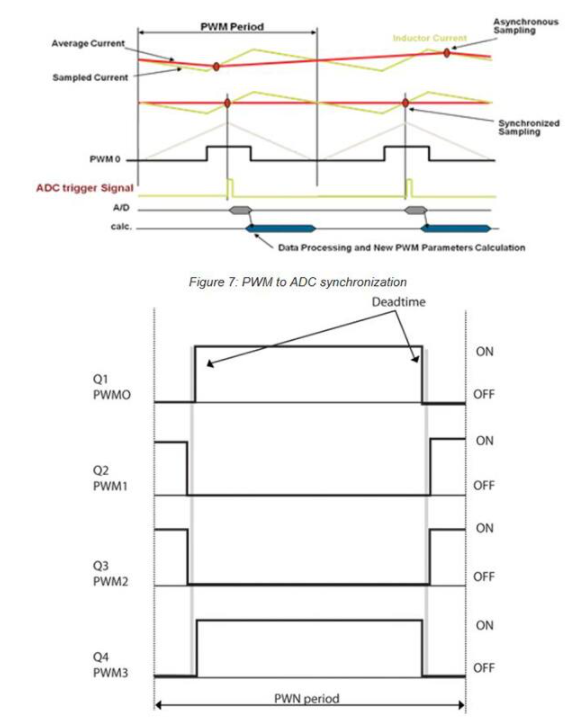
圖 6:手動觸發
即使是一個簡化的例子,很明顯能夠自動觸發 ADC 轉換會減輕 CPU 的負擔,否則可能會影響整個應用程序的性能(例如,能夠以 9600 或 19200 bps 的速度進行通信的區別。這些類型的功能加起來可以提高電機控制性能。以下部分將概述在支持電機控制的 MCU 中實現的一些交互以提高性能。
詳細的軟件 - MCU - 硬件交互
最簡單的 8 位 MCU 能夠進行感應式 BLDC 電機控制,只要它具有三個 PWM 輸出、三個通用輸出、三個通用輸入和一個額外的定時器,通過一些巧妙的軟件,甚至可以避免額外的定時器。這并不意味著它會是一個理想的解決方案,它可能會在速度和扭矩控制方面受到限制,它也缺乏檢測故障和采取措施避免故障的能力。這樣的解決方案在使用低功率且風險很小的低端設備(例如小型計算機風扇)中是有意義的。
大多數電機控制系統需要更多功能。扭矩控制:至少添加一個ADC通道和放大器(用于分流電阻)。過壓和欠壓監控:添加另一個 ADC 通道。自動故障檢測:添加至少一個觸發所有 PWM 信號被禁用的輸入引腳。無傳感器操作:再添加三個 ADC 通道,最好連接到延遲單元,以定期精確觸發轉換。更復雜的控制算法需要更多的支持功能。
以下是電機控制 MCU 中有助于提高 BLDC 電機控制性能的特性列表:
?
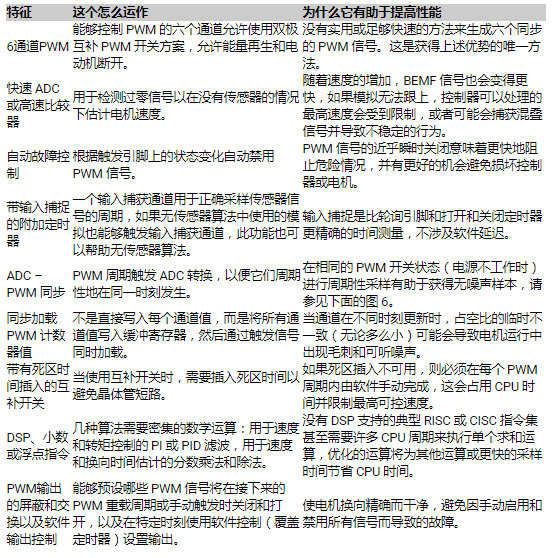
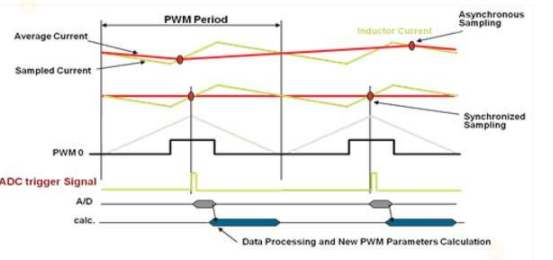
圖 7:PWM 到 ADC 同步
?
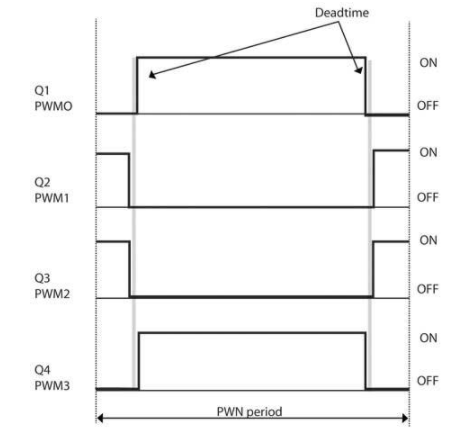
圖 8:帶有死區時間插入的互補開關(以灰色顯示)
Kinetis
MCU
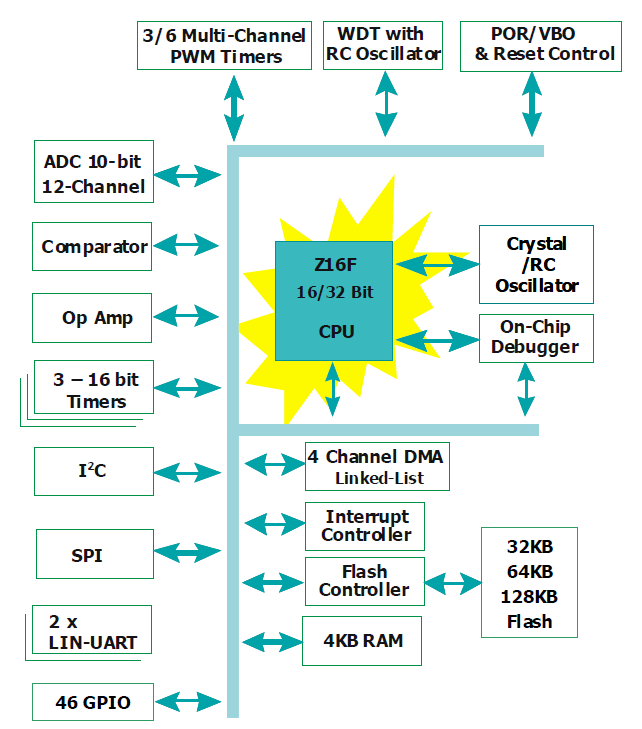
飛思卡爾Kinetis MCU 代表了業界最具擴展性的 ARM? CortexTM-M4 MCU 產品組合。Kinetis 設備有許多不同的衍生產品,從低引腳數/低速設備,到總線時鐘速度高達 120 MHz 的以太網和高速 USB 設備。這些器件還采用創新的 90 nm 薄膜存儲 (TFS) 閃存技術和獨特的 FlexMemory(可配置嵌入式 EEPROM)。Kinetis 設備包括一組核心外設,然后基于特定應用程序的基本功能構建。特定外設差異化示例:段式 LCD、USB、以太網、用于醫療或計量的模擬前端等。大多數 Kinetis 設備中的基本功能集以及所有電機控制功能,將在下一節中詳細介紹,
Kinetis 電機控制功能
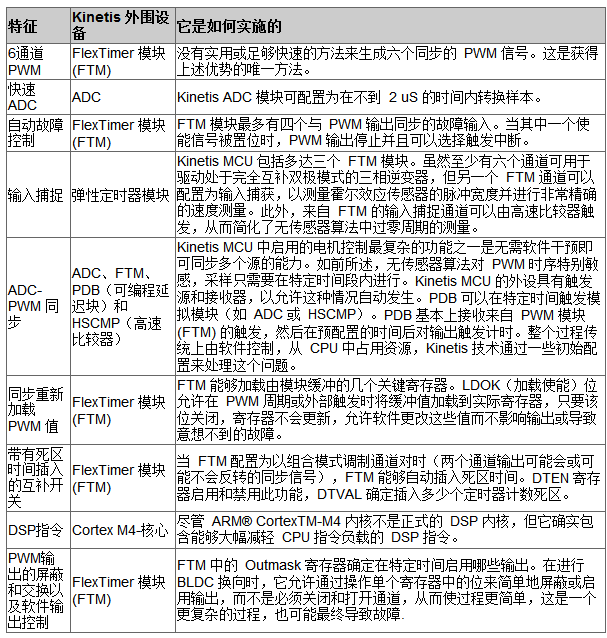
在電機控制方面,Kinetis MCU 系列部件包括一個能夠執行中低復雜度電機控制算法的基本子系統。下表詳細介紹了這些功能,建立在前幾節的基礎上,但詳細說明了 Kinetis 技術如何實現電機控制功能。
?
適合 Kinetis 技術的電機類型和控制算法
憑借上述功能以及適當的電機控制軟件,Kinetis 技術能夠執行以下控制算法。
DC(正向、反向、雙極、單極):有刷直流電機只需要一個 PWM 通道和一個輸入即可控制傳感器。更復雜的算法可以包括使用 4 晶體管 H 橋進行正向反向控制,以及用于電流再循環的雙極控制。
FlexTimer 模塊:四個 PWM 通道。如果將正交編碼器用作傳感器,則第二個 FTM 可用作正交編碼器輸入。
ADC:電機電流和直流母線電壓(均為可選)。
GPIO:速度/位置傳感器。
DSP指令:PI控制器。
步進(單極、雙極、全步、半步、微步):步進電機是另一種類型的電機(有刷直流),它非常容易控制(單極、全步),但可以提高復雜性以達到更好的性能(雙極、半步、微步)。盡管許多應用甚至不需要反饋(精確計算控制器采取的步數就足夠了),但微步(一種用于獲得軟扭矩/步進曲線的算法)確實至少需要電流反饋。
FlexTimer 模塊:八個 PWM 通道。
ADC:電機電流和直流母線電壓(均為可選)。
GPIO:速度/位置傳感器。
BLDC 傳感器:如前所述,關鍵組件是 6 個 PWM 通道和一個輸入捕獲通道,用于測量霍爾效應傳感器開關周期的速度。
FlexTimer 模塊:六個 PWM 通道。如果將正交編碼器用作傳感器,則第二個 FTM 可用作正交編碼器輸入。同步重新加載 PWM 值。PWM 信號的屏蔽、交換和軟件輸出控制,以實現有效換向。
ADC:電機電流和直流母線電壓(均為可選)。
GPIO + 1 輸入捕捉:霍爾效應速度/位置傳感器。
DSP指令:PI控制器
BLDC 無傳感器:雖然聽起來復雜性相似,但這是電機控制的轉折點之一。沒有任何 MCU 可以實現高性能的無傳感器 BLDC 電機。
FlexTimer 模塊:六個 PWM 通道。同步重新加載 PWM 值。屏蔽 PWM 信號以實現有效換向。
ADC:電機電流和直流母線電壓(均為可選)。
ADC 或比較器:對三相信號進行采樣以檢測過零。
輸入捕捉:測量過零時間。
延遲塊:在沒有任何 CPU 干預的情況下正確計時開始采樣。
DSP指令:PI控制器。
帶傳感器的 PMSM(FOC、正弦調制、三個分流電阻器):PMS(永磁同步)電機的結構類似于 BLDC 電機:永磁轉子和定子采用三相繞組。與 PMSM 電機的不同之處在于,由于它們的結構,它們可以更有效地由正弦信號(由 PWM 輸出模擬)控制。磁場定向控制 (FOC) 是與正弦調制結合使用以控制這些電機的先進技術,它包括在數學上(通過矩陣運算)將檢測到的為電機供電的電流從正弦信號轉換為兩個線性矢量。然后這些矢量由 PI 控制器控制,然后轉換回正弦信號。
PMSM 無傳感器(FOC、正弦調制、三個分流電阻器):PMSM 無傳感器技術實施起來非常復雜,并且對 CPU 要求很高。Kinetis MCU 可以運行 PMSM 無傳感器算法,但在執行其他關鍵任務的可用資源方面可能會達到實際限制。
ACIM V/Hz:ACIM(交流感應電機)是電機控制復雜性的另一個重要飛躍。最重要的原因是它們是異步的。雖然前面描述的電機有一個永磁轉子,它使轉子與定子電場完全同步(當控制正確時),但 ACIM 電機沒有永磁體,因此鐵芯“跟隨”定子電場但有一定的角度稱為“滑移”的相位差。在這些電機中,電機速度、轉矩、頻率和電壓之間的關系不是線性的,因此這些電機的精確控制非常復雜。用于簡化 ACIM 控制的一種技術是使用 Volts-per-Hertz (V/Hz) 曲線。本質上,這意味著創建一個電壓和頻率值表,其中電機將適當加速。這種技術不會輸出最精確的結果,但它很簡單,因此在許多不需要非常高的精度的應用中,這可能是一個很好的選擇。
飛思卡爾在市場上擁有優越的地位,可以提供廣泛的解決方案來滿足幾乎所有的客戶需求。對于更先進的電機控制解決方案,飛思卡爾提供了廣泛的產品組合,甚至可以涵蓋最苛刻的應用。
在某些情況下,可能需要 DSC 控制器的專用 DSP。飛思卡爾擁有大量采用數字信號控制器或 Power Architecture? 技術實施的解決方案庫,可幫助客戶快速應對實施高級電機控制算法所帶來的挑戰,例如復雜范圍的磁場定向控制、單分流 PMSM 控制甚至高級無傳感器啟動過程。。
理想的 Kinetis 技術 + 電機控制應用
Kinetis MCU 非常適合用于許多電機控制應用。通過提供廣泛的引腳對引腳兼容解決方案和關鍵模塊路線圖,旨在實現最佳電機控制。
非常適合 Kinetis MCU 的電機控制應用示例:
中小型電器:許多電器不需要先進的電機控制,但會受益于更簡單的電機控制以及 Kinetis 技術中的其他功能,例如,高端咖啡機可以在水泵中配備電機控制器或一體式咖啡研磨機。
玩具:從振動到機器人運動,許多玩具都使用簡單、經濟高效的電機。
工業控制:盡管許多工業控制系統是分布式的并且依賴于處理器網絡,但具有成本效益或多用途的工業面板可以包括用于小型傳送帶、風扇或泵等的嵌入式 BLDC 控制器。
結論
飛思卡爾在電機控制市場擁有創新歷史,將 Kinetis 系列添加到電機控制解決方案組合中;飛思卡爾繼續擴大其選擇范圍以滿足各種客戶要求。
受市場對降低功耗、噪音和提高效率的持續需求的推動,BLDC 電機的使用量不斷增加。飛思卡爾致力于提供有針對性的解決方案,幫助客戶在其應用中快速實施電機控制,無論是在工廠自動化市場、電器還是醫療領域。我們了解客戶面臨的挑戰,并且隨著產品和支持解決方案的不斷增加,我們努力讓客戶快速有效地進入市場。
Kinetis MCU 系列代表了行業許多領域中大量電機控制應用的絕佳選擇。飛思卡爾推出具有 DSP 功能的 120-150 MHz ARM? CortexTM-M4 內核,以及單周期 MAC、單指令多數據 (SMID) 擴展和單精度浮點單元等特性,支持電機控制應用所需的密集數學處理算法。專為承擔電機控制任務而設計的關鍵模塊,例如飛思卡爾的 FlexTimers,總共提供多達 20 個通道。硬件死區時間插入和正交解碼以及精確的 ADC 轉換模塊使 Kinetis 系列能夠滿足您的許多電機控制需求。

















 工商網監
工商網監
評論