 電子發燒友App
電子發燒友App


磁場定向控制 (FOC) 是電機系統的一項重要技術,尤其是那些使用永磁體 (PM) 的電機系統。一般來說,FOC 提供了一種在負載快速變化的可調速驅動應用中控制同步電機的有效方法,并且可以提高交流感應電機的功率效率,尤其是在較低速度下。出于這個原因,一些設計人員錯誤地將 FOC 與交流電機聯系起來。誠然,當今的無刷直流 (BLDC) 電機往往非常高效,即使沒有 FOC,效率也高達 96%,但 FOC 為這些系統帶來的價值是減少了轉矩脈動,從而使電機性能更平穩,運行更安靜。
例如,將 FOC 引入汽車的風扇控制器將允許風扇有效地移動空氣,而不會因電機的嗡嗡聲而干擾駕駛員。結果是更安靜的駕駛體驗。從成本和制造的角度來看,將 FOC 引入基于 BLDC 的系統不需要對電機進行硬件更改。所需要的只是一個具有足夠 MIPS 的 MCU,以支持電機控制環路內的 FOC 處理。
轉矩脈動
FOC 通過解耦磁通和轉矩分量來提高性能,從而可以獨立控制它們。對于使用磁體的電機,不需要控制磁通,因此開發人員只需要控制轉矩即可。FOC 在很寬的速度范圍內都有效,包括需要弱磁的高速。提供相對簡單的控制方法,可以使用 FOC 提供閉環控制,而不會不利地增加系統成本。
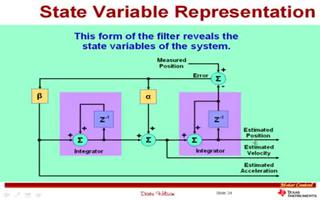
簡單來說,FOC 是一種電機控制技術,系統試圖將靜止或“定子”磁通矢量定向到相對于轉子磁通矢量的特定角度(見圖 1)。最佳定向程度取決于需要最大化電機的特性。FOC 最常見的用途是最大化電機每安培的扭矩。這在定子磁通矢量與轉子磁通矢量成 90 度時實現,除非電機具有可變磁阻,例如內部埋有磁鐵的電機。在這種情況下,取向度通常為115至120度。
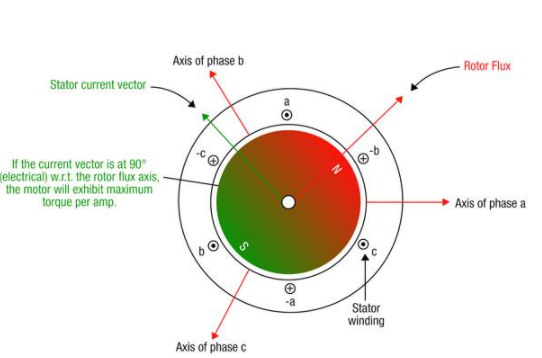
圖 1:磁場定向控制技術將定子磁通矢量定向到相對于轉子磁通矢量的特定角度。(來源:德州儀器。經許可使用。)
實際上,每種電機控制算法都基于 FOC 原理。例如,有刷和基于換向的電機已經以這種方式工作了一個多世紀。在這些應用中,FOC 并未被特別稱為一種技術,因為換向器以機械方式執行此定向。定子本身是靜止的,因此它們的通量也是靜止的。換向器的工作是循環電流,以使轉子磁通也有效地靜止。
但是,在設計沒有換向器的電機控制系統時,定子和轉子磁通不會自動對齊。事實上,它們都是旋轉的,所以它們的方向必須手動管理。考慮一個 BLDC 電機,當電機換向時。系統測量轉子的角度,然后嘗試打開適當的定子線圈,使轉子和定子之間的方向盡可能接近 90 度。然而,電機只有六個換向間隔,因此,精度最多限制在 +/- 30 度。當轉子進入新的換向區時,會出現 +30 度的誤差。在換向區的中間,轉子在最佳方向上完美對齊,沒有誤差;然后。當轉子離開換向區并進入下一個換向區時,
這種換檔誤差的過程會在系統中引入扭矩波動。對于某些應用,例如電機旋轉風扇的 HVAC 系統,系統往往具有容錯性,對性能的影響很小。然而,對于動力轉向等應用,駕駛員可以通過方向盤感受到扭矩波動的影響。轉矩脈動也會增加系統產生的可聽噪聲。
FOC 最適用于呈現正弦反電動勢波形的電機,例如交流感應電機、永磁同步電機 (PMSM) 和許多 BLDC 電機。請注意,FOC 是轉矩控制算法,而不是速度控制算法。可以通過在 FOC 環周圍纏繞速度環并將其輸出適當地饋送到 FOC 環來控制速度。
同樣,有刷直流電機和帶 FOC 的交流電機之間的主要區別在于,轉子和定子角度在有刷直流電機中自動保持,而基于 FOC 的電機必須自行負責保持角度。FOC 并不是控制電機的一種新奇的方式。這確實是電機想要控制的方式。
分解 FOC
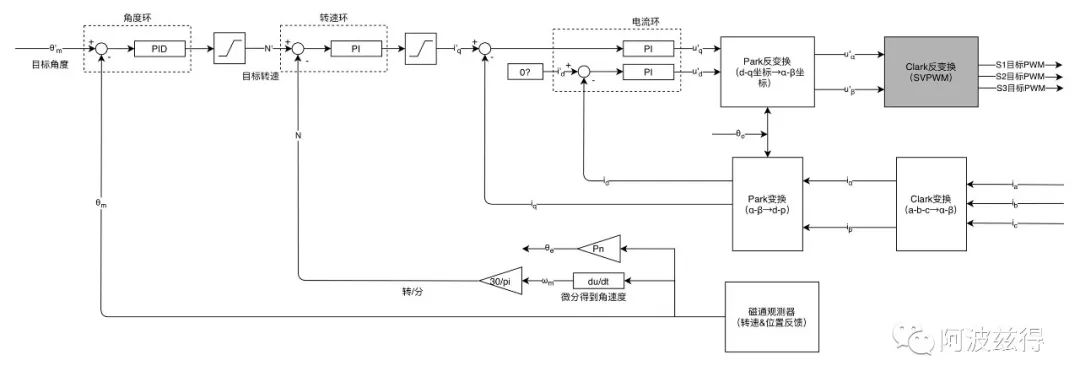
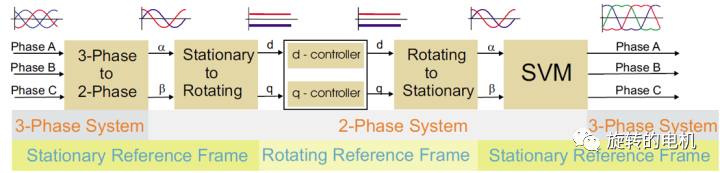
當然,基于 FOC 的控制比簡單的換向更復雜、更難理解。然而,一旦拋開所有的方程式和謎團,FOC 可以被視為四個簡單的步驟(參見圖 2)。(1) 系統測量已經流入電機的電流。(2) 然后將其與所需電流進行比較, (3) 放大所得差分或誤差信號以生成校正電壓。(4) 最后,將校正電壓調制到電機端子上。根據應用程序,此過程每秒重復數千次。
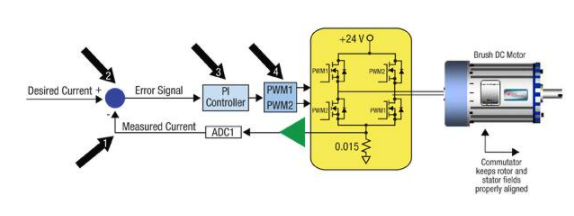
圖 2:FOC 可以通過四個簡單的步驟來實施。(來源:德州儀器。經許可使用。)
例如,對于基于 FOC 的交流電機系統,系統必須使用傳感器或無傳感器實現來確定轉子磁通的角度。然后系統必須測量三相電機的三個電流。這些電流在線圈中流動,理想情況下會產生與轉子矢量成 90 度的電流矢量(或任何最佳方位角)。由于轉子正在移動,因此該矢量可能會稍微偏離并需要進行校正。通常使用旋轉變壓器或編碼器測量轉子角度。在確定適當的誤差矢量后,系統會計算三個新電流,以重新定位電流矢量相對于轉子磁通的位置。請注意,正向克拉克變換可用于將三相電流矢量轉換為兩個正交矢量,從而產生相同的凈矢量。這樣,
開發人員有許多用于感測相電流的選項。為了降低成本,可以在逆變器中放置一個分流器。更準確的選擇往往會更昂貴。例如,LEM 傳感器是一種基于磁性的傳感器,與電機相位成一直線放置,以獲得比分流器更準確的讀數。
電流測量的完整性對 FOC 性能至關重要,捕獲傳感器讀數需要控制 MCU 上的 ADC。今天,10 位 ADC 通常為大多數應用提供足夠的精度。然而,許多供應商更喜歡使用 12 位 ADC 來實現更高的分辨率。這種更高的分辨率消除了輸出中的量化誤差,并產生了更平滑的波形。
FOC 為應用帶來的精度取決于誤差信號保持的緊密程度;即,對準角度的準確性取決于系統更新的頻率。對于典型應用,以 10 kHz 運行的控制回路可提供足夠的響應能力。對于可以受益于更高精度的應用,20 kHz 是一個常用頻率。主要的權衡是隨著工作頻率的增加,所需的 MCU MIPS 數量也會增加。
例如,德州儀器 (TI) 的 C2806 Piccolo? MCU 以 80 MHz 運行,可以在 15 到 20 μs 內執行整個 FOC 計算,具體取決于同時執行的其他控制功能。即使 PWM 周期為 40 μs,這仍將 C2806 的至少一半帶寬留給其他系統任務(檢查傳感器、閃爍 LED、通過 CAN 端口發送消息等)。一般的經驗法則是使用不超過 MCU 容量的 50% 到 60% 用于 FOC;由于中斷,系統將沒有足夠的容量來處理應用程序的其余部分。
開發人員還可以選擇實施無傳感器 FOC。取決于應用,軸角傳感器可能非常昂貴。在這種情況下,可以通過將 FOC 頻率提高三倍來計算轉子磁通角,從而在軟件中進行角度測量,成本效益更高。這需要每次 FOC 迭代 40 到 60 μs,并且需要具有足夠帶寬的更昂貴的 MCU。請注意,由于 FOC 需要連續驅動所有電機相位,用于 BLDC 電機的無傳感器技術不適用于 FOC,因為必須關閉一個相位才能讀取反電動勢信號。然而,其他算法也可用,它們將在幾度內以高精度讀取電機磁通角,而無需軸傳感器或無電源相位。
克服成本障礙
實施 FOC 的最初障礙之一是成本。相比之下,基于交換控制的系統比較簡單,考慮到 FOC 所需的計算數量,即使它提供更平穩的操作,但對于許多應用來說,增加的 FOC 系統成本太高,尤其是在汽車和家電系統中。
然而,在過去的幾年里,加工技術成本的下降已經大大降低了 FOC 的價格。由于系統只需要更大的 MCU 來提供執行 FOC 的處理資源,因此將 FOC 引入系統的成本可能低至 50 美分。與電機系統其余部分的成本相比,FOC 僅占總 BOM 的 2% 到 3%。
以這個價格,FOC 可以添加到各種各樣的系統中。例如,許多洗衣機和烘干機制造商在基于交流感應或永磁同步電機 (PMSM) 的系統中轉向 FOC。減少扭矩紋波使這些設備能夠更安靜地運行。它們還能夠更平穩地運行,從而減少齒輪系的振動并延長電器的可靠運行壽命。或者,制造商可以利用 FOC 提供的更平穩的操作來重新設計齒輪系并降低整體系統成本。
FOC 也正在工業和基于消費者的 HVAC 系統中實施。例如,空調系統有兩臺電機——一臺用于風扇,一臺用于壓縮機。為了增加壓縮機的使用壽命,HVAC 系統正在轉向 FOC。其中許多系統同時還在風扇控制器中添加了 FOC。同樣,考慮到通風口的放大振動特性,主要好處是運行更平穩、更安靜。
受低成本 FOC 控制可用性影響的第三個主要應用領域是汽車。正如所料,混合動力車輛的牽引力控制通過 FOC 得到改善。對于傳統車輛,FOC 是通過電動助力轉向顯著提高燃油效率的基礎。基于液壓的動力轉向需要液壓泵的持續運行,即使駕駛員不經常使用轉向系統,例如以 65 MPH 的速度在高速公路上行駛時。相比之下,基于 FOC 的電動助力轉向系統可以按需運行,從而顯著提高效率。當以氣體效率(令人印象深刻的 1 到 3 MPH)來衡量估計的節省時,轉向使用 FOC 的動力轉向的激勵措施簡直令人信服。
將 FOC 引入電機控制系統
許多硅公司提供了一套多樣化的工具來快速啟動基于 FOC 的系統的設計。多種開發平臺可用于不同類型的電機和應用。例如,TI 為開發人員提供其 C2000? 電機控制和 PFC 開發人員套件 (TMDS1MTRPFCKIT),以使用單個 Piccolo F28035 MCU 實現具有集成功率因數校正 (PFC) 的電機的 FOC。雙電機套件 (TMDS2MTRPFCKIT) 也可用于控制具有 FOC 和集成 PFC 的兩個電機。
TI 的 controlSUITE? 軟件包括多種參考設計,可為開發人員提供自己設計的起點。controlSUITE 應用程序也是自我更新的,因此開發人員始終可以訪問最新的軟件。FOC 支持適用于 C2000 MCU 系列,包括 C2802x、C2803x 和 C2806x 器件。C2802x 架構的工作頻率高達 60 MHz。C2803x 用于更復雜的應用,包括 TI 的控制律加速器 (CLA),這是一種獨立于 C2000 內核運行的集成浮點處理器。C2806x 是 TI 最新的控制器,工作頻率高達 80 MHz,并具有多項電機控制增強功能,包括新的復雜數學指令和 DMA 控制器,用于在將數據從 ADC 或通信外設移動到 RAM 時卸載 CPU。
C2803x 和 C2806x 控制器也非常適合安全應用。CLA 與 CPU(即非對稱處理器)分離,因此可用于滿足安全規定,通過執行檢查 CPU 的計算和確認電壓輸出是否正確等操作來驗證 CPU 的準確和不間斷運行。正確的。
電機控制的未來
未來幾年最大的變化將不是來自 FOC 控制算法的改進,而是通過引入新的設計方法來抽象 FOC 實現的復雜性。例如,TI 提供多種電機控制設計產品,包括 MATLAB 提供的 Simulink 開發環境和 Visual Solutions 提供的 VisSim。開發人員可以使用這些工具在軟件中創建他們的電機控制系統模型。通過使用此模型運行模擬,開發人員可以調整系統以根據特定應用程序的需要運行。模型完成后,工具會自動為控制回路生成 C 源代碼。然后,開發人員可以調整生成的代碼并將其集成到整個系統中。
使用 C 語言為開發人員從特定于處理器的實現中抽象代碼提供了幾個好處,既可以使開發人員更容易理解代碼,也可以促進代碼在處理器和應用程序之間的遷移。然而,使用 C 確實是以犧牲一些效率為代價的。然而,雖然基于 FOC 的電機控制理解起來很復雜,但它是一種實施起來相當一致的技術,并且在給定一組操作參數的情況下,創建適當的處理代碼相對簡單。此外,對編譯器技術的持續投資正在縮小匯編和生成的 C 代碼之間的性能差距。例如,Visual Solutions 估計他們的工具可以達到手工編碼效率的 5% 到 10%。權衡是開發人員可以在更直觀的開發思維空間中進行設計——例如,創建電機模型——而不必考慮 MCU 的架構和匯編指令格式。這樣,開發人員可以專注于應用程序性能,而不是實現細節。結果是更高效的設計和更快的上市時間。
Simulink 和 VisSim 等工具有可能徹底改變電機控制系統的設計方式。隨著這些工具在準確生成控制回路軟件方面變得更加熟練,電機控制系統工程師將不再需要查看 C 源代碼。事實上,編寫電機控制軟件的需要可能會完全消失。電機控制是一個眾所周知的問題,如果 TI、MATLAB 和 Visual Solutions 等公司是正確的,那么 FOC 和電機控制一般將在未來五到十年內成為基于參數的功能。
雖然 FOC 的好處——提高效率、更平穩的運行和更低的噪音——已經為人所知一段時間,但鑒于增加的系統復雜性和成本,許多制造商認為 FOC 遙不可及。隨著 MCU 技術的不斷創新,FOC 已經變得負擔得起,并被引入到廣泛的應用中,包括電器、汽車、HVAC 以及其他工業和消費市場。通過使用先進的建模工具,開發人員可以以最少的軟件開發和成本設計、優化并將完整且強大的電機控制系統推向市場,從而將 FOC 的性能優勢帶入各種新設備。
特別感謝德州儀器電機控制團隊負責人 Dave Wilson 對本文的貢獻。













 工商網監
工商網監
評論