工業機器人有4大組成部分,分別為本體、伺服、減速器和控制器。而其中,工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2022-09-09 14:21:38 1713
1713 交流伺服系統包含交流伺服驅動器和伺服電機。選用伺服系統,主要為了進行精密的定位控制,伺服驅動器在位置控制模式下運行,控制框圖如圖一所示。
2022-12-05 10:03:411734 什么是伺服系統?伺服系統是由哪些部分組成的?伺服驅動器的原理是什么?伺服控制系統有哪幾種控制方式?
2021-10-11 08:03:33
伺服系統的發展趨勢1、交流化伺服技術將繼續迅速地由DC伺服系統轉向AC伺服系統。從目前國際市場的情況看,幾乎所有的新產品都是AC伺服系統。在工業發達國家,AC伺服電機的 市場占有率已經超過80
2021-09-10 07:56:26
伺服系統有哪幾種控制方式?伺服系統的工作原理是什么?有哪些性能?
2021-09-23 08:39:15
伺服系統由哪幾部分組成?伺服系統常用的參數有哪些?如何選擇伺服電機?伺服驅動器控制原理是什么?
2021-09-26 08:26:53
1.伺服系統的發展“伺服(servo)”這個詞語源于希臘語,含有“奴隸”的意思。“伺服機構”是按照控制信號的要求而動作控制信號到來之前,被控對象是靜止不動的接收到控制信號后,被控對象則按要求動作控制
2021-06-28 06:39:54
。高度的集成化還顯著縮小了整個控制系統的體積,使伺服系統的安裝與調試工作都得到簡化。 (5)智能化 智能化是當前一切工業控制設備的流行趨勢,伺服驅動系統作為一種高級的工業控制裝置也不例外。最新數字化
2019-06-24 05:00:50
伺服系統國內外研究現狀如何?伺服系統的發展趨勢是怎樣的?伺服系統相關技術是什么?
2021-09-30 07:29:16
伺服系統的機械時間常數是什么?伺服系統的電氣時間常數是什么?求大神解答
2021-09-30 08:16:25
機器人是如何實現運作的?伺服系統的特點和功用是什么?
2021-11-15 07:25:50
交流伺服電機的工作原理伺服系統的組成及分類伺服馬達(交流)的特點伺服控制的選型步驟
2021-02-22 07:55:20
伺服系統配件有哪些?如何去安裝伺服系統?伺服驅動器與伺服電機是如何進行連接的?漏電開關有接地和沒接地的區別在哪?
2021-06-28 07:05:32
伺服系統控制框架是由哪些部分組成的?伺服系統控制包括哪些參數?
2021-10-11 09:05:11
伺服系統控制常見的加減速方式有幾種?分別是哪些?
2021-09-30 06:38:52
基于Labview的氣動伺服系統辨識程序,哪位朋友做過的幫幫忙,搭建的系統跟論文《基于 LabVIEW 的氣動比例伺服系統模型辨識研究》中的模型一樣。
2016-04-19 15:56:52
基于永磁同步電機伺服系統的控制算法是什么?如何對一種基于永磁同步電機伺服系統的控制算法進行仿真?
2021-07-13 08:12:47
如何用STM32控制一個三軸伺服系統?
2021-09-26 08:56:25
變頻器是什么?伺服系統又是什么?變頻器與伺服系統的工作原理是什么?變頻器與伺服系統有什么共同點?變頻器與伺服系統的區別在哪些地方?
2021-07-05 06:43:48
怎么實現伺服系統中的濾波器?
2021-10-09 06:27:28
伺服技術是跟蹤與定位控制技術,是機電一體化技術的重要組成部分,它廣泛地應用于數控機床、工業機器人等自動化裝備中。隨著現代工業生產規模的不斷擴大,各個行業對電伺服系統的需求日益增大,并對其性能提出
2019-09-03 07:06:57
隨著電液伺服控制理論的發展, 很多先進的控制策略被應用于電液伺服控制領域中。如: 文獻[ 1 ]闡述了基本運算為不完全微分PID的濾波型二自由度控制算法, 針對飛行仿真轉臺用液壓伺服系統的特點進行了
2019-08-21 06:13:08
數控機床的伺服系統一、 伺服系統的組成 數控機床的伺服系統按其功能可分為:進給伺服系統和主軸伺服系統。 主軸伺服系統用于
2008-12-30 16:12:52 60
60 本章將詳細討論進給伺服系統的軟件硬件結構;進給伺服系統基本功能的原理及實現方法。進給伺服系統是數控系統主要的子系統。如果說CNC裝置是數控系統的“大腦”,是發布
2009-02-16 00:21:310 為了提高工作效率和可靠性,介紹了控制芯片LPC2131在工業縫紉機中的應用;提出了一種基于ARM的永磁同步電機伺服系統的控制方案,并給出仿真結果,證明該控制方案的可靠 性。
2009-06-11 16:18:4933 伺服系統的扭矩控制(Toque Control)和速度控制(Velocity Control)?一般定位上的伺服系統之伺服馬達控制方式可分為扭矩控制(Toque Control)及速度控制(Velocity Control)兩類,這兩種控制方式都
2009-07-04 08:30:1253 將模糊控制和PID 控制相結合,提出了一種智能復合控制策略,并將其應用于交流伺服系統的控制。利用模糊控制在線自適應調整PID 控制器的參數,從而使系統的靜態和動態性能
2009-09-12 15:36:4516 基于MatlabRTW 的機器人伺服系統設計方案:機器人伺服控制系統是非線性多變量的控制系統,這給系統的開發提出了更多、更復雜的問題,使得機器人控制系統的開發困難.文中提出一
2009-10-06 10:12:0334 伺服系統原理與設計是為自動控制專業本科生專業課編寫的教材。原書由胡祐德、曾樂生、馬東生共同編著,北京工業大學副校長肖春林教授主審,于1993年由北京理工大學出版社正
2009-10-09 10:54:360 跟蹤控制系統仿真已成為控制系統試驗研究、規劃設計和調度運行的重要工具。因此光電跟蹤伺服系統仿真平臺的開發是非常必要的。本文簡單介紹了光電跟蹤伺服系統仿真平臺
2009-12-07 14:27:049 伺服系統的PID控制
伺服系統的摩擦動態特性是非常復雜的,目前已經提出了許多摩擦模型。
2010-05-04 16:05:5351 機械共振是伺服系統中普遍存在的一個問題,機械共振主要由伺服系統中功率傳輸元件的柔性所引起。伺服系統中標準的控制律是按照剛性耦合的負載來設計的,然而,在實際的伺服系
2010-07-14 15:07:2520 本文Backstepping控制在交流伺服控制系統的應用研究,無論是對于交流伺服控制系統還是對于Backstepping控制都是一項十分有意義的工作,為將來交流伺服系統的控制策略研究提供
2010-08-23 17:05:1217 鑒幅式伺服系統的工作原理
圖5--25是鑒幅式伺服系統的方框圖。該系統由測量元件及信號處理線路、數模轉換器、比較器、驅動環節
2009-05-06 23:52:592090 
臺達伺服系統在石英晶體切割設備上應用
介紹基于臺達B系列伺服控制系統的石英晶體元器件切割自動化設計技術。項目已經開發成
2009-06-13 17:41:11736
雙路伺服系統電路圖
2009-06-20 11:16:41444 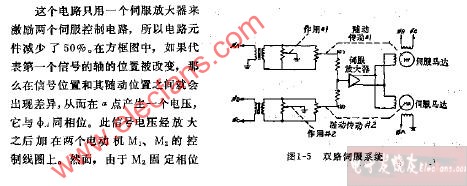
PLC的工業機器人關節直流伺服系統
摘要:利用可編程控制器(PLC)控制系統的高可靠性、編程及維護方便、體積小的特點,將其應用于環流可逆調速系統中,研制出基于P
2010-04-21 17:54:321087 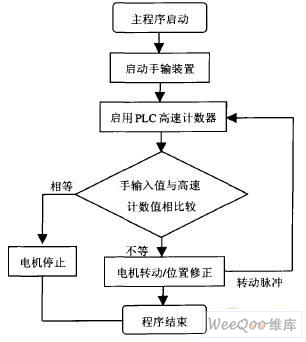
傳統 PID控制 在伺服系統高精度位置跟蹤和改善系統品質方面已露出諸多不足,且系統中存在的控制干擾和測量噪聲會在很大程度上影響伺服系統的跟蹤精度。提出一種帶有卡爾曼濾波器
2011-07-06 16:05:35114 伺服系統按其驅動元件劃分,有步進式伺服系統、直流電動機伺服系統、交流電動機伺服系統。按控制方式劃分,有開環伺服系統、閉環伺服系統和半閉環伺服系統等。
2011-07-10 17:15:042298 
伺服系統脈沖控制電路將產生用來控 制伺服系統 的脈沖。圖示的組件顯示這個伺服系統應該產生一個90的總旋轉。
2011-11-03 16:33:193474 用液壓元件組成的伺服系統(什么是伺服系統)稱為液壓伺服系統,并且液壓伺服系統具有易于實現直線運動的速度位移及力控制,驅動力、力矩和功率大,尺寸小重量輕,加速性能好,響
2012-02-09 10:05:337075 
針對傳統方法難以整定船載雷達伺服系統PID參數的問題,將模糊參數自整定PID控制技術應用到伺服系統位置回路中,通過仿真實驗表明該方法可以不依賴系統的數學模型,而根據輸入輸
2013-07-25 17:47:0328 伺服系統的PID控制技術下載
伺服系統的PID控制技術下載
2015-12-09 16:46:538 教學雷達伺服系統設計與制,教學雷達伺服系統設計與制作
2016-01-04 15:26:5818 位置伺服系統PID控制策略研究與應用-2010。
2016-04-01 14:49:5617 高精度交流伺服系統的模糊PID雙模控制-2007。
2016-04-01 15:58:1620 基于DSP的電機伺服系統中的模糊PID控制-2011。
2016-04-01 17:23:0926 音圈電機伺服系統模糊PID控制-2010。
2016-04-06 14:21:4918 轉臺伺服系統模糊PID復合控制算法-2008。
2016-04-06 14:35:1214 基于SVPWM的PMSM矢量控制伺服系統研究。
2016-04-18 10:02:1723 交流永磁伺服系統技術講座第六講_八_交流永磁伺服系統的控制策略。
2016-04-26 10:47:0820 交流永磁伺服系統技術講座第六講_九_交流永磁伺服系統的控制策略
2016-04-26 10:47:089 交流永磁伺服系統技術講座第六講_七_交流永磁伺服系統的控制策略
2016-04-26 10:47:0821 交流永磁伺服系統技術講座第六講_十_交流永磁伺服系統的控制策略
2016-04-26 10:47:0810 交流永磁伺服系統技術講座第六講_十二_交流永磁伺服系統的控制策略。
2016-04-26 10:47:0818 交流永磁伺服系統技術講座第六講_十一_交流永磁伺服系統的控制策略
2016-04-26 10:47:0810 交流永磁伺服系統技術講座第四講_伺服系統的組成_三_
2016-04-26 10:47:0818 電液伺服系統位置和力模糊切換控制方法_高炳微
2017-01-07 17:01:100 直驅XY平臺伺服系統預測魯棒輪廓跟蹤控制_趙希梅
2017-01-07 15:26:081 模糊控制及其在液壓伺服系統中的應用_余兵
2017-02-07 16:59:251 伺服系統,亦稱隨動系統,是一種能夠跟蹤輸入的指令信號進行動作,從而獲得精確的位置、速度或力輸出的自動控制系統。大多數伺服系統具有檢測反饋回路,因而伺服系統是一種反饋控制系統。
2017-06-12 16:01:227159 基于DSP控制的電液位置伺服系統電模擬仿真研究
2017-10-19 14:33:268 以快速、精確跟蹤為主要目標的位置伺服系統,是現代高科技各領域中不可缺少、應用十分廣泛的一種自動控制系統。在歷經開環、電氣.液壓、直流電氣伺服的發展歷程之后,現已進入交流電氣伺服迅猛發展的時代。本章
2017-11-08 09:59:217 、對功率進行放大、變換與調控等處理,使驅動裝置輸出的力矩、速度和位置控制非常靈活方便。本文為大家介紹在工業中伺服系統的幾種設計方案,以供參考。
2018-02-20 18:13:001065 
本文開始介紹了伺服系統的概念和伺服系統主要作用,其次闡述了伺服系統的分類與基本要求,最后闡述了伺服系統主要特點和基本組成結構。
2018-03-27 08:43:2418096 本文主要介紹什么是伺服系統,首先介紹了伺服系統的結構及特點,其次介紹了伺服系統作用、分類及性能要求和參數,最后闡述了伺服系統的發展趨勢。
2018-04-28 17:08:5632921 現代交流伺服系統,經歷了從模擬到數字化的轉變,數字控制環已經無處不在,比如換相、電流、速度和位置控制;采用新型功率半導體器件、高性能DSP加FPGA、以及伺服專用模塊(比如IR推出的伺服控制專用引擎)也不足為奇。本文主要介紹了現代交流伺服系統原理及控制方法,具體的跟隨小編一起來了解一下。
2018-05-02 10:17:026166 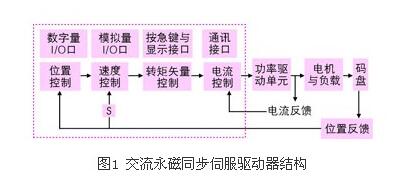
本文首先介紹了伺服系統的組成,其次介紹了伺服系統的特點、作用及分類,最后闡述了伺服系統應用領域、應用趨勢及實例,具體的跟隨小編一起來了解一下。
2018-05-31 10:35:0315589 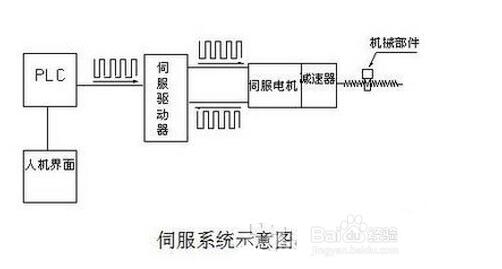
本文主要詳解PLC控制伺服系統步驟,首先介紹了PLC工作原理以及PLC控制伺服電機3種方式,其次闡述了西門子PLC控制的伺服控制系統,具體的跟隨小編一起來了解一下。
2018-06-01 10:46:1250851 本文首先介紹了伺服系統技術的要求,其次闡述了伺服系統復合控制技術和非線性補償技術,最后介紹了伺服系統常用的線性補償,具體的跟隨小編一起來了解一下。
2018-06-01 12:59:563974 本文主要詳解基于自抗擾控制的雙環伺服系統,分別從ADRC抗干擾機理、伺服系統自抗擾控制、仿真研究以及實驗結果四個方面詳細解析,具體的跟隨小編一起來了解一下。
2018-06-01 14:44:287452 
本文首先介紹了伺服系統工作原理及特點,其次介紹了伺服系統在數控機床的應用,最后介紹了數控伺服系統的作用。
2018-06-01 16:52:2910053 伺服系統廣泛應用于航空航天、兵器、船舶、工業自動化等領域,隨著伺服系統交流化、數字化、集成化的發展趨勢,提高伺服系統的開發效率顯得尤其重要。傳統的伺服系統開發設計主要由需求分析、設計、實現及測試
2019-04-05 11:44:00992 什么是工業機器人伺服系統?
2019-05-04 08:57:004887 
從市場情況來看,2018年交流伺服系統市場規模增速下滑明顯,而工業機器人用伺服系統的需求規模逐年增加,且工業機器人專用伺服占交流伺服系統市場比重逐年上升。
2019-04-29 09:10:067051 
伺服系統(servomechanism)又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統。
2019-10-30 09:44:475961 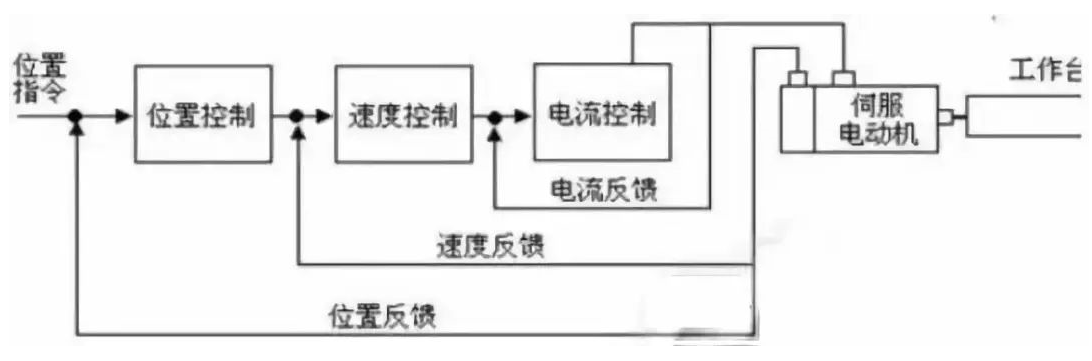
PLC的工業機器人關節直流伺服系統(安徽力普拉斯電源技術有限公司湖州地區電話)-文檔為PLC的工業機器人關節直流伺服系統總結文檔,是一份不錯的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,
2021-09-17 15:54:5813 伺服系統是工業自動化控制項目里經常要用到的執行機構。啥是執行機構,就是實際動手干活的那部分。拿PLC與伺服系統來說,PLC就是控制器,相當于人的大腦,而伺服系統相當于人的手和腳等等。人想要走路,大腦
2022-04-15 08:26:4415990 伺服系統是工業自動化項目中必不可少的工具,控制精度高,轉矩穩定,工作效率高,具有廣闊的發展前景。
2022-05-06 16:05:022508 伺服系統是自動化生產里面的執行機構,各類機械手想要做功,離不開伺服系統的幫助。伺服系統相比以往的其他電機,最大的優點就是控制的精度高,因為其擁有編碼器結構,可以實現閉環控制。作為伺服系統的主體,運動
2022-06-02 14:32:292869 伺服系統是自動化生產里面的執行機構,各類機械手想要做功,離不開伺服系統的幫助。伺服系統相比以往的其他電機,最大的優點就是控制的精度高,因為其擁有編碼器結構,可以實現閉環控制。
2022-06-02 17:03:513110 電子發燒友網站提供《用于電動船的泵、風扇和伺服系統的控制板.zip》資料免費下載
2022-08-18 09:40:093 伺服系統(servomechanism)又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統。
2022-11-21 20:54:481923 伺服系統的工作原理 伺服系統(servomechanism)又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意
2023-02-08 14:11:461788 下面,讓我們來看一下怎樣通過PLC來控制伺服系統吧。
1. 變量添加
在PLC 變量新建一個變量表,用來存儲伺服軸變量。
2023-02-13 15:37:595353 交流伺服系統按照電機類型的不同可以分為兩種:異步伺服系統和同步伺服系統。根據控制器的不同,交流伺服系統又可以分為模擬伺服系統和數字伺服系統。
2023-03-07 14:20:44949 機電伺服系統廣泛應用于各種機械設備中,其種類和形式多種多樣。以下列舉一些常見的機電伺服系統:
伺服電機系統:伺服電機系統是一種利用電機控制機械運動的伺服系統,它通常包括電機、編碼器、控制
2023-03-07 14:31:081421 編碼器安裝在伺服電機上,與電機同步旋轉,轉動的同時將編碼信號送回控制器,控制器據以判斷伺服電機的轉向、轉速、位置信息。伺服系統按照執行元件的不同可分為液壓伺服系統、電氣伺服系統以及氣動伺服系統,目前應用最為廣泛的是電氣伺服系統。
2023-04-24 16:11:02235 
電子發燒友網站提供《用Stylophone控制伺服系統:音高檢測.zip》資料免費下載
2023-07-11 14:40:390 伺服系統主要由伺服控制器、驅動電路、伺服電動機及相應反饋檢測器件組成。1.伺服系統原理當人為的給定控制信號并被伺服控制系統接收時,執行機構就會按照控制信號的指令進行一系列的運動和動作;如果不再
2023-08-27 08:08:421729 
伺服系統(servomechanism)又稱 隨動系統 ,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化
2023-09-27 10:30:361296 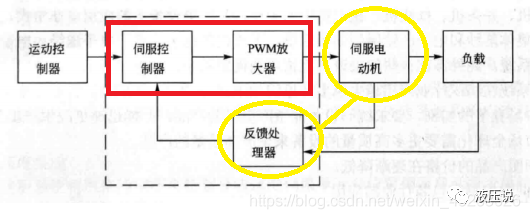
工業機器人有4大組成部分,分別為本體、伺服、減速器和控制器。而其中,工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2023-11-01 09:32:28486 
按傳遞信號(指輸入和偏差信號)的元件不同可分為:①電液伺服系統(傳遞信號的元件為電氣元件);②機液伺服系統(傳遞信號的元件是機械裝置);③氣液伺服系統(傳遞信號的元件是氣動元件)。
2023-11-01 09:36:01401 交流伺服系統的分類及應用場合交流伺服系統按照電機類型的不同可以分為兩種:異步伺服系統和同步伺服系統。根據控制器的不同,交流伺服系統又可以分為模擬伺服系統和數字伺服系統。異步伺服系統:異步伺服系統
2023-11-03 08:07:41522 伺服系統(servomechanism)又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統
2023-12-05 10:25:03479
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論