如何想辦法使永磁交流伺服電機的“相電流”波形始終與“相反電勢”波形保持一致呢?由圖1可知,只要能夠隨時檢測到正弦型反電勢波形的電角度相位,然后就可以相對容易地根據電角度相位生成與反電勢波形一致的正弦型相電流波形了。
2020-09-09 16:09:54 14291
14291 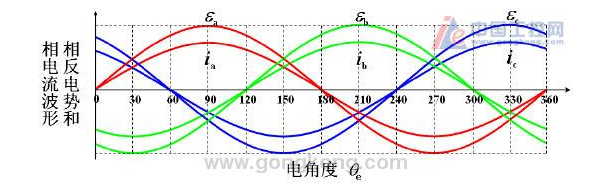
論壇中總是有人問及伺服電機編碼器相位與轉子磁極相位零點如何對齊的問題,這樣的問題論壇中多有回答,本人也曾在多個帖子有所回復,鑒于本人的回復較為零散,早就想整理集中一下,只是一直未能如愿,今借十一長假之際,將自己對這一問題的經驗和體會整理匯總一下,以供大家參考,或者有個全面的了解。
2023-02-02 10:20:322432 本文介紹未對齊導致問題案例
2023-06-08 10:04:31980 
對測量結果的影響,提高系統的測量靈敏度方面尤為困難。下面看看相位噪聲的含義和測量方法相位噪聲的含義相位噪聲是對信號時序變化的另一種測量方式,其結果在頻率域內顯示。用一個振蕩器信號來解釋相位噪聲。如果
2014-06-12 00:37:53
的相位對齊關系,以此方法可以將傳感器的上述信號邊沿或過零點對齊到-30度電角度相位; 2) 以阻值范圍適當的三個等值電阻構成星形,接入永磁伺服電機的UVW動力線,以示波器觀察U相動力線與星形等值電阻
2018-10-25 10:09:31
KV值是如何定義的?電角度和機械角度是什么意思?它們有什么關系?BLDC和PMSM的主要區別在哪里?
2021-06-26 07:02:41
如圖所示,為三路交錯對稱的周期性邏輯信號,頻率為50k,占空比0.45.如何在后級設計硬件電路, 處理后,使得他們三者對齊。謝過各位大神了!
2018-04-20 06:05:58
這里寫自定義目錄標題做嵌入式系統軟件開發,經常在代碼中看到各種各樣的對齊,很多時候我們都是知其然不知其所以然,知道要做好各種對齊,但是不明白為什么要對齊,不對齊會有哪些后果,這篇文章大概總結了內存
2021-12-14 09:09:08
`這些高性能系統中的系統設計人員將選擇超低相位噪聲振蕩器,并且從噪聲角度來講,信號鏈的目標就是使振蕩器相位噪聲曲線的惡化最小。這就要求對信號鏈上的各種元器件做殘余或加性的相位噪聲測量。 最近發布
2019-03-19 22:09:54
用到FOC算法,其中clark變換中用到了電角度,搜索發現電角度是機械角度×極對數,那機械角度如何得到呢?求指教
2022-03-08 18:51:20
怎樣去調試NuttX shell呢?NuttX shell的調試基本方法總結
2021-12-20 06:15:48
小弟使用F407控制PMSM, 利用矢量控制。在做電流(Id和Iq閉環)單閉環時,IPARK和park中的電角度是不是只能用函數生成的電角度,而不能使用編碼器反饋算出來的實際電角度??我使用函數生成
2016-02-19 08:25:28
橫河最新高精度功率分析儀WT5000一臺儀器最多可進行4組電機評價: WT5000可對兩組電機進行完整的電角度測量評價,可同時測出如下參數: 扭矩與轉速 電機輸出功率 電角度
2018-10-23 21:18:39
bldc反電動勢延后30度電角度檢測零點,延后30度電角度的代碼不明白,希望有大神幫忙解釋一下?這個代碼怎么就代表延時30度
2019-06-06 21:14:13
你好,我們在設計中需要使用 hmc7044 產生一系列頻率為 204MHz 且相位對齊的時鐘,并且所有的 204MHz 時鐘都由 外部VCO輸入時鐘 816MHz 所產生。
目前所有的時鐘都已經獲取
2023-12-01 10:15:39
自動對齊選中的控件,該方法對程序框圖同樣適用。也可以用鼠標框選部分控件,然后利用Ctrl+Shift+A對所選中的控件對齊,實際上在程序框圖編輯中,該方法更為常用。
2012-12-13 15:35:28
6050斜著放上電初始化讀出的角度是0為什么呀它不應該讀出自身偏移的角度么
2019-05-07 06:36:37
機械角是什么?電角度又是什么?為什么要校準電角度呢?有哪些步驟?BLDC控制是什么意思?BLDC控制的硬件原理是什么?
2021-09-22 06:24:18
嵌入式開發-內存對齊最近項目中遇到程序報Bus error,經排查發現是內存對齊的原因導致的這個問題,在此紀錄總結下一、為什么要進行內存對齊操作平臺原因(移植原因):不是所有的硬件平臺都能訪問任意
2021-12-17 06:34:09
第10章 交流旋轉電機(同步電機、異步電機)的繞組電角度 = 極對數p*機械角度每極每相槽數 = 總槽數/(極對數*相數)相帶槽距角= 極對數p * 360°/總槽數 均勻對稱原則電勢相加原則 電勢
2021-09-13 07:08:07
論壇中總是有人問及伺服電機編碼器相位與轉子磁極相位零點如何對齊的問題,這樣的問題論壇中多有回答,本人也曾在多個帖子有所回復,鑒于本人的回復較為零散,早就想整理集中一下,只是一直未能如愿,今借十一
2021-06-28 09:58:40
那么方便。 要精確的偏移,點開屬性窗口修改坐標,自然是麻煩,實際要操作簡單,還是離不開F11功能鍵,不贅述. 下面直接講方法,首先 對齊,然后 等距,然后點M O輸入需要的角度 ,然后點某一個元器件的腳(其它位置也可,隨意,用了就知道)。肯定比手工移動位置的漂亮。
2016-09-28 13:49:45
幾種常用的測量角度速度的方法原理是什么?三輪車可以用編碼器測速嗎?還是只能用光電編碼盤?
2021-10-19 09:44:17
編輯確定。 2.按照以上方法在標簽上添加內容。在標簽上添加完內容之后,明顯可以看到,由于文字內容長度不一致,標簽上的對象不是很整齊。 我們可以選中標簽上的對象,點擊“查看-對齊”設置對齊方式
2020-12-07 15:00:44
怎樣使用ST FOC電機去控制同步電角度?如何對其進行波形測試?
2021-09-24 07:38:42
專利名稱:旋轉角度檢測裝置和使用其的電動助力轉向系統的制作方法技術領域:本發明涉及用于檢測旋轉部件的旋轉角度的旋轉角度檢測裝置和使用旋轉角度檢測裝置的電動助力轉向設備。背景技術:檢測旋轉部件的旋轉角度
2021-08-27 07:45:01
電機的運動原理是什么?怎樣去搭建一種電機模型?電角度和機械角度有什么關系?
2021-07-20 06:58:05
摘要:本文首先介紹了無線電測向的一般知識,說明了無線電測向機的分類方法和應用;著重從測向原理的角度說明了不同測向體制的特點和主要技術指標;最后從實際出發,提出選用建議。供讀者參考。
2019-07-18 06:07:32
永磁交流伺服電機的工作原理是什么?更換新編碼器后的常規零位校正方法是什么?永磁交流伺服電機的編碼器相位為何要與轉子磁極相位對齊?
2021-09-27 08:06:54
4極對數旋轉變壓器:機械角度90°,對應的電角度是360°。機械角度360°,對應的電角度是4*360°。
2017-10-11 11:05:09
函數的主要作用是什么?如何實現?永磁同步電機的電角度是怎么計算的?
2021-09-23 07:03:46
最近在做永磁同步電機轉子初始角定位,本人的做法是在IPARK環節,給D軸電壓為0,Q軸電壓為正值,想通過此來將轉子在正式啟動前,先對齊到電角度零位上,但是無奈轉子不動沒反應,求前輩指點,感激不盡!
2017-04-26 19:57:30
在使用 ST FOC 電機庫時,當使用 Hall 信號作為位置信號時,需要輸入同步電角度數據,這個數據根據當前使用電機的特性進行輸入,會在每次 Hall 信號變化時同步電角度,如果角度偏差較大時會影響控制效果,可能帶來效率或者電機的震蕩,初始測試還是有必要的,本文詳細說明測試注意事項以及測試方法。
2023-09-11 07:43:13
我們有必要先了解此討論的前提:編碼器初始安裝相位正確。伺服驅動器將全然“採信”電機編碼器的初始安裝相位所表征的電機電角度相位,無需在伺服電機 的UVW動力線接線連接后進行額外的電角度初始相位的調整或
2021-09-17 06:54:54
編碼器零點電角度偏移量同步電機的控制,轉子的位置是必要的反饋。電機的磁極的換向,控制的是電角度。編碼器的安裝和電角度,存在誤差。機械角度的反饋,在多極對數時,需要做一個電角度的轉換,進入控制的轉子
2021-09-03 06:08:34
就可以了,注意在斷電后在上電時,角度會慢慢的提升到上次斷電的角度,如斷電前其中一個角度為90度,斷電后在上電,此時mpu6050保持不動,這個角度值會從0開始攀升到90度。新手上路,可能不是很規范,希望大家可以指導一下,共同學習,感謝觀看。...
2022-02-10 07:52:58
單片機開發重點-字節對齊問題在缺省情況下,C編譯器為每一個變量或是數據單元按其自然對界條件分配空間。一般地,可以通過下面的方法來改變缺省的對界條件:使用偽指令 #pragma pack(n),C
2021-11-22 06:06:08
示波器上看就是周期脈沖信號與正弦波信號不動。 但是如果我將設備掉電,重新配置寄存器,該次上電的正弦波信號的初相位仍與周期脈沖信號對齊,但與上次上電時的初相位不同了。我想問一下如何使用,使得生成的正弦波
2018-12-18 09:06:36
請問各位I/Qdemodulator 如何做到頻率與相位的同步?頻率可以使用頻綜做到本振與載波的頻率一致,但是相位如何保證,如果有一個固定的相位差,那么星座圖將有一個角度的轉動,請問這個問題是在數字域解決的還是有其他方法?謝謝!
2018-09-28 15:01:44
采用滑膜估算的角度和實際的角度總是有相位差,但是觀察由滑膜估算的電流和實際的電流,它們的波形基本重合。為什么?下圖為估算的電流和實際的電流波形圖。和估算的角度和實際的角度的圖形。其中黃色的代表估算的角度,綠色的代表實際的角度。謝謝指導。
2018-12-14 13:51:08
本文提出了一種基于詞性的判別函數,用來自動識別句子對齊結果的正確性。通過反向采用基于長度的對齊算法,糾正了初步對齊產生的連續性錯誤。該方法節省了人力,同時提
2009-09-18 10:56:31 8
8 該文分析了利用多幀步進頻信號聯合處理實現運動目標距離-速度2 維高分辨檢測的信號處理方法,并針對目標運動引起處理結果波形發散的問題,提出了基于多普勒通道對齊的速度
2009-11-13 14:01:1715 變壓器相位檢測方法
摘 要:正弦信號的相位檢測是許多測量工程的一項基本而重要的任務。討論了利用改進的.$/ 解調法進行變壓器相位檢測的原理,對實際信
2009-11-19 11:51:3770 :運動補償是工SAR成像的關鍵問題之一。運動補償分為包絡對齊和初相校正兩步,其中包絡對齊是初相校正的基礎。本文提出的基于迭代加權散射重心的包絡對齊方法,有效的克服了
2010-01-12 21:37:5615 本文主要闡述了在某雷達系統中為實現偽碼對齊,所采用的滑動控制方法的原理及在FPGA芯片上的實現。
2010-03-02 16:04:2213 角度調制(頻率調制與相位調制)
1, 一般表示式:sm t = A cos [ω c t + ϕ t ]式中[ω c t + ϕ t ] 是sm t的瞬時相位,ϕ t稱為 的瞬時相位偏移(相對于 ) ;d / d t 是sm t的瞬
2010-06-01 22:59:1419 本文扼要介紹了幾種 相位測量 方法。對雙向過零平均鑒相技術、高頻相位測量方法(取樣鎖相技術)、低頻動態相位測量和斷續信號相位測量作了較詳細地論述。對國內外在這方面的新進
2011-08-22 18:20:28112 在逆合成孔徑雷達成像的Stretch信號處理方法中,需要補償本振信號延時量的誤差引起的一維距離像的相位抖動。當本振信號延時量誤差較大時,采用先補償平方相位項,后進行包絡對齊
2011-09-07 18:46:2433 提出了一種使用正弦調幅激光相位測距方法它具有快速和高精度的特點適用于實時高精度測距實驗系統中使用了獨立的內外光接收電路提高了測量速度此外對大小角度情況進行判斷!處理
2011-11-04 16:56:23104 在四輪定位等系統中常需要非接觸的精確角度測量,以確定兩個被測對象的軸心是否在一個平面上,進而測量物體的偏移角度。為此,提出了利用線陣CCD 進行精確角度測量的原理和實現方法
2011-11-07 14:55:0774 該算法采用自適應雙門限方法進行雜波區的定位,再針對有雜波的距離單元,采用最小功率準則進行多普勒相位補償,從而完成對運動雜波的對消。通過仿真證明,該方法可有效地抑制運動雜
2011-12-16 14:38:4423 針對傳統過壓/欠壓、過頻/欠頻、相位突變、主動頻率偏移孤島檢測方法的不足,提出了一種改進方法。將相位偏移量作為輔助量加入主動移頻孤島檢測方法中,使檢測容性負載的孤島現
2013-09-26 17:17:0933 3用戶MIMO干擾信道中穩健的機會干擾對齊方法_趙知勁
2017-01-07 16:00:430 GNSS天線相位中心偏差檢測方法
2017-01-07 20:43:127 首先說說,什么叫對齊。如果一個數據是從偶地址開始的連續存儲,那么它就是半字對齊,否則就是非半字對齊;半字對齊的特征是bit0=0,其他位為任意值。字對齊的特征是bit1=0,bit0=1,其他
2017-09-19 16:04:420 摘要 空間矢量脈寬調制(SVPWM)廣泛用于3相逆變器控制系統。SVPWM MCU實現的最有效方法是中心對齊PWM,因為MCU中的PWM模塊可輕松產生中心對齊PWM。本文將討論SVPWM實現方法
2017-11-16 16:12:1811 。通常的相位對齊技術由于引入了Delay_Aligner,會帶來2~4nS的相位不確定,不能滿足系統指標要求。 這里介紹一種利用MMCM實現多芯片相位對齊的串行收發器糾偏方法: 1) 利用圖1所示電路實現多芯片間的全局時鐘相位對齊。
2018-01-12 05:53:142356 
在三相并網系統中,要求三相鎖相環技術能夠快速準確地檢測電網電壓相位信息,并且抗擾能力強、響應速度快。提出一種區別于傳統的基于同步旋轉坐標系三相并網系統鎖相方法的相位檢測方法,該方法通過分析三相電網
2018-03-01 16:41:4814 ADI的電流和角度傳感器實現電機控制系統中的精確相位電流和角度測量。ADI業界領先的性能使我們的客戶有能力為最終應用提供更順暢、更高效的電機。
2018-05-24 16:47:005124 專業音響技術人員對于相位問題并不感到陌生,音響系統中的相位是很抽象的,本文首先介紹了音箱中分頻器的相位問題,其次闡述了音響中常見的相位問題及解決方法,具體的跟隨小編一起來了解一下。
2018-05-28 17:09:5935565 
空間矢量脈寬調制(SVPWM)在3相逆變器控制系統中得到了廣泛的應用。MCU實現SVPWM的最有效方式是中心對齊PWM,因為MCU中的PWM模塊可以容易地產生中心對齊PWM。本文討論了SVPWM的實現,并提出了一種易于實現中心對齊SVPWM的方法,該方法適合于片上PWM模塊。
2018-06-01 10:20:5010 也就是說,基于CortexM3內核的芯片,它支持部分指令的非對齊訪問,但非對齊訪問要慢于對齊訪問。即非對齊訪問是需要代價的,訪問效率會受到影響。所以,我們在應用中要盡量遵循地址對齊的尋址訪問方式。關于地址對齊話題,在各個ARM內核技術參考手冊里略有介紹。
2019-02-04 15:20:002296 
以示波器直接觀察UV線反電勢波形過零點與傳感器的U相信號上升沿/Z信號、或Sin信號過零點、或Sin包絡信號過零點的相位對齊關系,以此方法可以將傳感器的上述信號邊沿或過零點對齊到-30度電角度相位。
2019-02-05 11:09:008107 測量相位,是在有電磁連接的同一系統并列或環接、主變壓器并列、以及新線路投入時不可缺少的試驗項目之一。測量相位的目的在于判斷相位和相序,防止由于彼此不一致,在并列時造成短路或出現巨大的環流而損壞設備,其測量方法如下。
2019-10-01 16:48:0016124 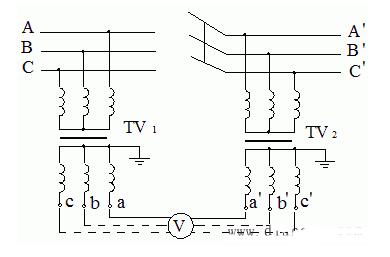
針對多探頭球面近場天線測試系統的通道不一致性提出了校準方法,并對對準角度誤差引入的近場測量幅度相位誤差進行了仿真分析。分析表明,當對準角度誤差 Δφ = 0. 5°時,引入的近場測量幅度誤差
2020-01-06 08:00:0019 數顯角度儀基體中的軸往一個方向轉動時,計數增加,轉動方向改變時,計數減少。計數與角度儀的初始位置有關。當初始化角度儀時,它的計數值被設置為0。通過計算旋轉的角度,可以很容易的測出位置和速度。
2020-05-11 11:25:489574 大家多聽過SSD固態對齊,或者也試的對齊,怎么看是否對齊呢?
2020-06-25 17:09:003895 
點云對齊是點云數據處理的重要步驟之一,粗對齊則是其中的難點。近年來,基于深度學習的點云對齊取得了較大進展,特別是3 Match方法,能夠在噪聲、低分辨率以及數據缺失的條件下取得較妤的對齊效果
2021-04-23 15:48:235 變化挖掘是業務流程管理的核心,從事件日志中挖掘岀業務流程的變化尢為重要。已有對變化挖掘的分析方法大多集中在源模型或目標模型已知的基礎上。文中從系統日志的角度提岀了一種基于成本最優對齊的業務流程變化
2021-05-18 14:08:5310 一、全局變量對齊問題:基本上用戶定義的變量是幾個字節就是幾字節對齊,這個比較好理解。uint8_t定義變量地址要1字節對齊。uint16_t定義變量地址要2字節對齊。uint32_t定義變量
2021-11-23 18:06:3111 對齊原則:數據存放的地址需要是其類型長度的整數倍;字節對齊的作用不僅是便于cpu快速訪問,同時合理的利用字節對齊可以有效地節省存儲空間。許多計算機系統對基本數據類型合法地址做出了一些限制,要求某種
2021-12-01 15:21:0511 DWIN屏使用方法總結(上)DWIN屏使用方法總結(上)DWIN屏介紹開發工具ICL生成CFG修改工程建立與下載工程建立文件下載總結DWIN屏使用方法總結(上)DWIN屏的使用應該有一段時間了,期間
2021-12-02 14:21:1212 DWIN屏使用方法總結(下)DWIN屏使用方法總結(下)數據幀常用的系統指令常用控件基礎觸控按鍵返回數據變量錄入圖標變量數據變量顯示總結DWIN屏使用方法總結(下)上一篇關于DWIN屏的總結學習
2021-12-31 18:56:3010 一、前言在單片機下使用C語言編程時,內存對齊的知識點必須掌握。掌握內存對齊后,可以防止內存碎片化,單片機有限的內存被更加有效地使用。二、內存對齊先看如下代碼:結構體Test1占用了多少字節?如果事先
2022-01-13 15:18:480 當你不指定 < 、>、^ 時,對字符串,默認左對齊;對數值,默認右對齊
2022-04-12 15:27:572813 總結一下: 結構體對齊不再是簡單的字節個數的拼湊,而是要與內存地址進行掛鉤~一般我們也可以理解為內存地址分配是多少字節的倍數,就是多少直接對齊~
2022-08-10 18:08:28962 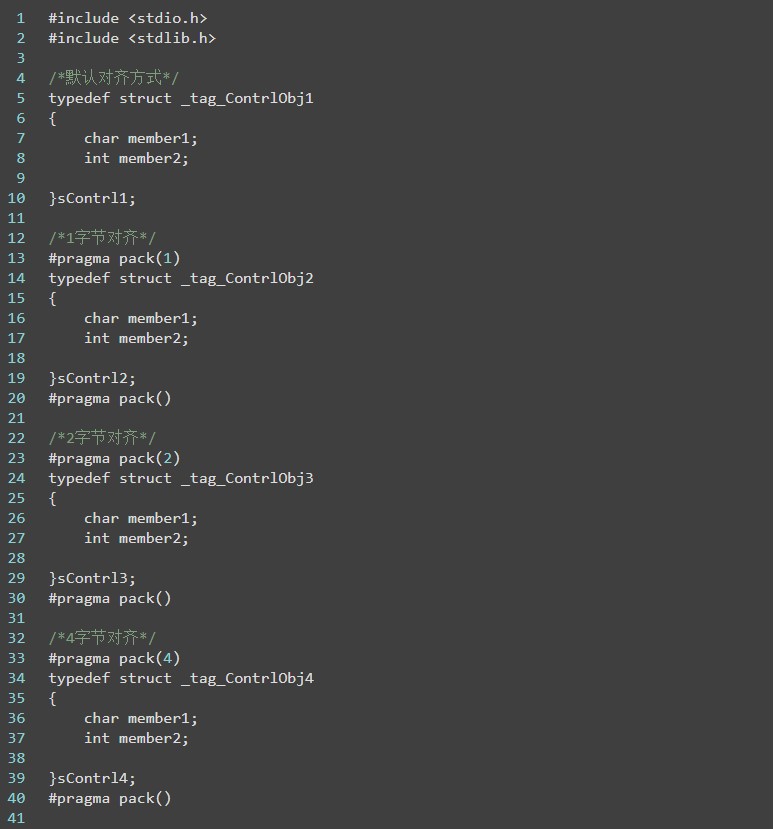
在此需要明示的是,永磁交流伺服電機的所謂電角度就是a相(U相)相反電勢波形的正弦(Sin)相位,因此相位對齊就可以轉化為編碼器相位與反電勢波形相位的對齊關系;
2022-09-23 15:49:431707 在本文中,我們利用圖像描述模型提出一個新穎的探針方法。通過這個方法,我們從文本角度分析了VLP模型的語義對齊機制。我們發現現有的VLP模型在對齊方面有明顯的缺陷。
2022-10-28 11:09:34729 當TX Buffer被使能時,可以通過TXBUFSTATUS的Bit0(Half Full)的狀態和TXPIPPM的調整實現TX通道同步。上電后TX通道間的相位和TXBUFSTATUS都處于隨機狀態,相位超前與延遲以及超前和延遲的UI數量都是不確定的
2023-02-02 10:00:031310 依據操作的方便程度,調整電機軸上的旋變轉子與電機軸的相對位置,或者旋變定子與電機外殼的相對位置;
2023-03-10 15:40:23781 其他類設計軟件通常是通過網格來對齊元件、過孔、走線的,嘉立創EDA提供非常方便的對齊功能 ,如 圖1所示,可以對選中的元件、過孔、走線等元素實行向上對齊、向下對齊、向左對齊、向右對齊、水平等間距對齊
2023-03-30 07:40:022379 C語言結構體對齊問題,是面試必備問題。我參與招聘技術面試的時候,也喜歡問這個技術點。
2023-05-26 14:10:42616 
一個地址未對齊引起的 HardFault 異常
2023-09-18 10:57:00380 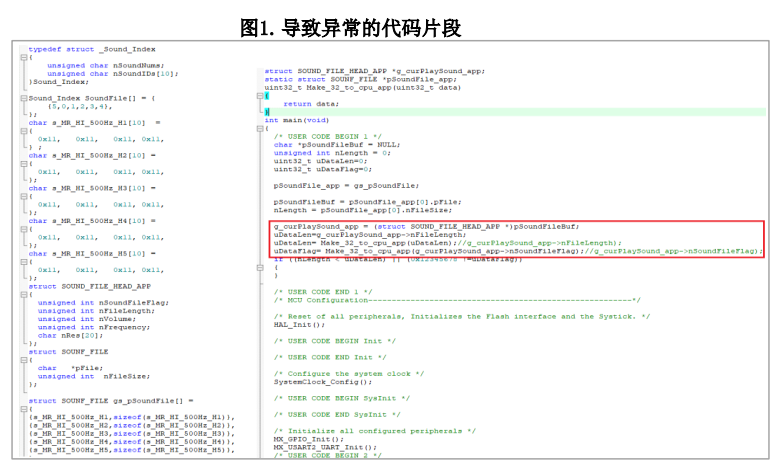
電子發燒友網站提供《總結Android傳輸的方法.pdf》資料免費下載
2023-10-09 16:16:160 七、伺服電機編碼器相位與轉子磁極相位零點如何對齊的修復1、增量式編碼器的相位對齊方式帶換相信號的增量式編碼器的UVW電子換相信號的相位與轉子磁極相位,或稱作電角度相位之間的對齊方法如下
2023-10-13 08:07:42331 
相位噪聲的頻譜定義與測試方法? 相位噪聲是指信號中相位的不穩定性,它能夠影響信號的頻率穩定性和精度,因此在很多應用中相位噪聲是非常關鍵的。相位噪聲的頻譜表示了噪聲在頻率域中的分布情況,依據其頻譜特性
2023-10-22 12:43:51409 滯后180度時的余裕,即系統相位裕度= 180度-(系統相位滯后角度- 180度)。 相位裕度實際上是一種到場理論,它表述了系統魯棒性的一個極限。在控制系統設計中,我們通常要求系統具有足夠的相位裕度,以保證系統的穩定性和性能。具體
2023-10-31 10:33:183626 什么是相位噪聲 產生相位噪聲的原因 相位噪聲的表示方法 相位噪聲的影響 測量相位噪聲的常用方法 相位噪聲是指信號的相位隨時間的變化引入的噪聲。在模擬和數字通信領域中,相位噪聲是一個非常重要的參數
2024-01-31 09:28:58634 相位傳感器故障表現及故障排除方法? 相位傳感器是一種用于測量旋轉物體相位角度的設備,常用于車輛發動機和轉子等旋轉機械的控制系統中。相位傳感器故障可能會導致控制系統失靈,因此及早發現和排除故障非常重要
2024-03-07 15:28:10138
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論