電機(jī)位置編碼器廣泛用于伺服驅(qū)動器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2018-05-16 08:43:56 8250
8250 在本系列中,到目前為止,我們已經(jīng)討論了針對電機(jī)位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。 這些是使用基于RS-485
2018-05-28 09:20:2211127 由于光電編碼器不僅能測位置還能通過一定的算法測速度,因此伺服電機(jī)通常在轉(zhuǎn)子軸的非負(fù)載端裝有光電編碼器。
2020-08-25 13:45:524951 
電機(jī)參數(shù)提取程序和帶編碼器接口的電機(jī)控制示例程序由瑞薩電子提供。因此,您可以使用 RA6T1 電機(jī)控制 RSSK 上的編碼器輕松運(yùn)行您自己的電機(jī)。(注1)
2022-04-26 09:53:324705 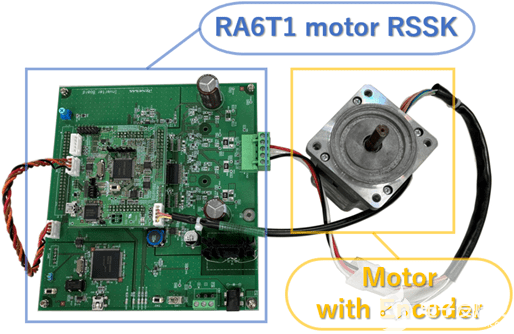
`描述該 TI 設(shè)計基于 BiSS 標(biāo)準(zhǔn)實(shí)現(xiàn)適用于位置或旋轉(zhuǎn)編碼器的硬件接口解決方案。它既支持 BiSS 點(diǎn)對點(diǎn)配置又支持 BiSS 總線配置。構(gòu)件塊包括 5V 的 BiSS 編碼器電源(采用創(chuàng)新
2015-04-29 11:27:30
描述該 TI 設(shè)計基于 BiSS 標(biāo)準(zhǔn)實(shí)現(xiàn)適用于位置或旋轉(zhuǎn)編碼器的硬件接口解決方案。它既支持 BiSS 點(diǎn)對點(diǎn)配置又支持 BiSS 總線配置。構(gòu)件塊包括 5V 的 BiSS 編碼器電源(采用創(chuàng)新
2018-12-04 14:24:19
該實(shí)驗(yàn)是平衡車的一部分知識,主要是用到STM32定時器的編碼模式。本文主要介紹與之相關(guān)的知識點(diǎn),包括編碼器的原理,STM32編碼器模式,通過串口打印捕獲的數(shù)據(jù)的實(shí)驗(yàn)代碼分析。在學(xué)習(xí)中,主要遇到三個
2021-06-29 06:35:04
那么是這樣的話,如果是光柵尺,比如說3米長,光柵尺上的絕對值編碼器上可以找到3米內(nèi)任意位置對應(yīng)的值。
可是電機(jī)的話,電機(jī)可以不停的轉(zhuǎn),就是說距離可以不停的變大,可是電機(jī)上的絕對值編碼器如何找出值一一對應(yīng)這不斷變大(或變小)的位置呢?
2023-11-21 08:30:00
電機(jī)位置的呢?今天就來聊一聊編碼器。 一、什么是編碼器 編碼器是將信號或數(shù)據(jù)進(jìn)行編制、轉(zhuǎn)換為可用以通訊、傳輸和存儲的信號形式的設(shè)備。編碼器把角位移或直線位移轉(zhuǎn)換成電信號,前者稱為碼盤,后者稱為碼尺。他
2016-06-27 16:43:31
電機(jī)加編碼器運(yùn)行2分鐘后,有的自學(xué)習(xí)都過不去,變頻器就會報OC,不加編碼器就不會出現(xiàn)OC。起初還以為是變頻器的問題,換過以后,還是出現(xiàn)OC,編碼器都換過了,總是這樣,小D請大家多幫幫忙。
2023-12-28 07:59:59
,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來看電機(jī)位置PID控制,其結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的位置,通過編碼器獲取電機(jī)累計轉(zhuǎn)動的脈沖數(shù)作為反饋,實(shí)現(xiàn)電機(jī)位置的控制。所以:對比兩張圖,速度控制與位置控制的主要區(qū)別,就是控制量的不同。
2021-06-29 07:39:25
編碼器接口模式是什么?編碼器配置源碼的配置過程是怎樣的?
2021-11-23 06:03:51
有一臺異步電機(jī)55KW安裝歐姆龍的差分編碼器CWZ1X,編碼器安裝在軸端托盤架子上,用三條螺栓固定在電機(jī)上,托盤和電機(jī)絕對是同心的,編碼器安裝在托盤中間小軸上,用三個螺絲固定在托盤上,電機(jī)伸出軸端
2024-03-06 17:34:21
系統(tǒng)起動位置環(huán),通過不斷測量光電編碼器每秒鐘輸出的脈沖個數(shù),并與標(biāo)準(zhǔn)值PD(理想值)進(jìn)行比較,計算出增量△P并將之轉(zhuǎn)換成對應(yīng)的D/A輸出數(shù)字量,通過控制器減少輸個電機(jī)的脈沖個數(shù),在原來輸出電壓的基礎(chǔ)上
2012-02-24 22:03:25
電機(jī)驅(qū)動參見以前的博客,這里補(bǔ)充編碼器測速的程序部分#include "encoder.h"#include "led.h"///TIM4 編碼器輸入
2021-09-07 06:51:08
伺服電機(jī)的種類有哪些?伺服電機(jī)主要的作用是什么?編碼器的結(jié)構(gòu)域工作原理是什么?編碼器的分類和特點(diǎn)有哪些?伺服電機(jī)與編碼器的工作是什么?
2021-06-28 08:11:44
`描述此 TI 設(shè)計基于 HEIDENHAIN EnDat 2.2 標(biāo)準(zhǔn)實(shí)現(xiàn)適用于位置和旋轉(zhuǎn)編碼器的硬件接口解決方案。構(gòu)件塊包括編碼器電源(采用創(chuàng)新的智能 e-Fuse 技術(shù))和可靠的半雙工
2015-04-29 11:55:26
描述 TIDA-00177 參考設(shè)計是連接到兩線 HIPERFACE DSL? 編碼器且符合 EMC 標(biāo)準(zhǔn)的工業(yè)接口。其應(yīng)用包括工業(yè)伺服驅(qū)動。此設(shè)計采用 3.3V 電源 RS485 收發(fā)器,并具備
2022-09-26 06:16:08
我想問一下,TI的PMSM的例程庫里,增量編碼器永磁同步電機(jī),初始位置是通過什么方式實(shí)現(xiàn)的。在例程的那個位置,謝謝
2018-10-30 15:58:42
旋轉(zhuǎn)編碼器的原理是什么?如何去編寫STM32配置Arduino的程序?STM32 Arduino是如何讀取編碼器和旋轉(zhuǎn)位置方向的?
2021-11-15 08:01:24
先寫一部分,然后在樓下回復(fù)續(xù)寫,不便之處,敬請見諒!1.正交編碼器部分(大家可以參考上面的鏈接理解,我只講解有用的部分) 1.1 何為正交編碼器該編器除了供電(3.3V-5V)外,有A,B兩相的輸出
2015-05-22 13:30:51
描述TIDA-00178 參考設(shè)計是針對正弦/余弦位置編碼器且符合 EMC 標(biāo)準(zhǔn)的工業(yè)接口。其應(yīng)用包括需精確速度和位置控制的工業(yè)驅(qū)動。該設(shè)計采用 16 位雙路取樣 ADC 且可使用插入式兼容 14
2018-12-19 14:12:35
labview編寫的運(yùn)動控制程序中,想要讀取伺服電機(jī)絕對式編碼器的位置,請問怎么通訊呢?用modbus的話,從機(jī)地址怎么確定呢?因?yàn)槭枪た貦C(jī)連接到轉(zhuǎn)接板上,再與驅(qū)動器項(xiàng)鏈這樣,沒有經(jīng)過串口……請問如果要通訊就要改變這樣的連接方式嗎?
2018-06-20 09:51:12
編碼器能夠滿足高精度、高可靠性、低成本的設(shè)計要求。那么將AS5040磁旋轉(zhuǎn)編碼器應(yīng)用于永磁同步電機(jī)位置檢測時,需要解決兩個問題:一是磁旋轉(zhuǎn)編碼器安裝位置初始定位,即確定編碼器輸出的位置信號與電機(jī)實(shí)際
2021-09-22 09:41:15
的講解我得知齒輪減速電機(jī)也是可以加編碼器的,編碼器是裝在電機(jī)屁股后面的,連接上位機(jī)測轉(zhuǎn)速的,因?yàn)橛械臋C(jī)械設(shè)備廠商對設(shè)備有著轉(zhuǎn)速控制要求,所以需要加裝編碼器。然而編碼器也有分型號,參數(shù)的,編碼器選型的話
2016-08-16 12:05:31
24日至26日訪問TI在本次紐倫堡SPS貿(mào)易展會上的展位。這個演示將為你展示與不同位置編碼器協(xié)議的實(shí)時檢測和連接。圖3:SPS上的多協(xié)議位置編碼器演示這篇博文總結(jié)了與電機(jī)位置編碼器的EMC兼容接口設(shè)計相關(guān)的博文系列。如果你希望在未來的博文中看到與位置編碼器接口設(shè)計相關(guān)的其它話題,請在下方留言。
2018-09-04 14:48:19
為什么要用電機(jī)驅(qū)動?TB6612電機(jī)驅(qū)動怎么實(shí)現(xiàn)?為什么要用電機(jī)編碼器?電機(jī)編碼器怎么使用?
2021-10-20 07:36:53
4.伺服電機(jī)與編碼器的工作:控制器驅(qū)動電機(jī)運(yùn)轉(zhuǎn),電機(jī)帶著編碼器旋轉(zhuǎn), 編碼器的反饋信號輸送到控制器,可以知道 電機(jī)的轉(zhuǎn)速,移動位置。或者 移動的距離。根據(jù)反饋的信號,進(jìn)過換算,在控制動作。 ------其實(shí)就是閉環(huán)反饋:Osean_li的博客
2018-10-25 10:07:08
編碼器可以分為哪幾類?怎樣去讀取編碼器的位置值?伺服電機(jī)與編碼器是怎樣工作的?
2021-09-26 08:43:27
伺服電機(jī)的編碼器能否更換?因電機(jī)軸壞,需要拆下加工,故需要把編碼器拆下來!需要注意哪些問題、
2023-12-26 08:18:16
什么是脈沖當(dāng)量?伺服電機(jī)和編碼器有什么關(guān)系?伺服電機(jī)自帶編碼器為什么還要外加編碼器?
2021-11-01 06:20:22
編碼器的原理是什么?電機(jī)編碼器是如何進(jìn)行接線的?編碼器接口的配置方式有哪些?使用編碼器時有哪些注意事項(xiàng)?
2021-08-02 10:21:23
和4096個周期(4096 = 212),以實(shí)現(xiàn)16 + 12或28位分辨率或1.341×μ度內(nèi)的旋轉(zhuǎn)位置精度。結(jié)論本文簡要討論了與為快速旋轉(zhuǎn)的電機(jī)實(shí)現(xiàn)小型,高精度電機(jī)編碼器有關(guān)的問題。它介紹了具有雙重同步
2020-09-15 10:09:32
描述此 TI 設(shè)計基于 HEIDENHAIN EnDat 2.2 標(biāo)準(zhǔn)實(shí)現(xiàn)適用于位置和旋轉(zhuǎn)編碼器的硬件接口解決方案。構(gòu)件塊包括編碼器電源(采用創(chuàng)新的智能 e-Fuse 技術(shù))和可靠的半雙工
2018-11-19 16:18:57
電機(jī)位置編碼器廣泛用于伺服驅(qū)動器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2018-09-05 16:07:42
有(A&B)二正交信號及零位信號(I),同時有電機(jī)磁極位置信號U、V、W,該編碼器具有出色的開關(guān)精度和高響應(yīng)速度,這使編碼器成為紡織機(jī)的伺服電機(jī)位置檢測的理想選擇之一。 6通道增量式編碼器48T2
2019-06-14 05:00:01
描述此參考設(shè)計基于 HEIDENHAIN EnDat 2.2 標(biāo)準(zhǔn)針對位置或旋轉(zhuǎn)編碼器實(shí)現(xiàn)了 EnDat 2.2 主協(xié)議棧和硬件接口。此設(shè)計由 EnDat 2.2 主協(xié)議棧、使用 RS-485
2022-09-23 06:53:43
如何使用編碼器接口實(shí)現(xiàn)定位?
2022-02-11 07:32:50
最近使用的有臺帶編碼器的伺服電機(jī)(配著相應(yīng)的伺服驅(qū)動器)漏油,想拆開更換油封,但是聽說伺服電機(jī)拆開自己不能安裝。因?yàn)樯婕暗?b class="flag-6" style="color: red">編碼器的位置。我想問一下:
1.帶編碼器的電機(jī)能拆開嗎?
2.電機(jī)拆開的話
2023-12-15 06:57:52
目前做一個電機(jī)位置控制時,遇到一個問題: 目的是直流電機(jī)轉(zhuǎn)動一圈停止,電機(jī)起始位置與停止位置始終在同一位置 電機(jī)轉(zhuǎn)動一圈后,編碼器輸出1000個電平跳變信號,當(dāng)我讀取到1000信號時,停止電路
2020-03-13 05:20:31
角度,可以通過其SSI接口輸出,并由單片機(jī)或者DSP的SPI讀取。 由上圖三可以看到,電機(jī)位置角可以表示為:θ = Ax - (α1 + α2),由于Ax可以直接從磁編碼器芯片中讀取,為了能夠求出
2023-03-09 15:30:26
我現(xiàn)在想買一個旋轉(zhuǎn)編碼器,用來反饋電機(jī)的位置(只是反饋電機(jī)的位置信號,并不是驅(qū)動電機(jī),因?yàn)槲矣行D(zhuǎn)變壓器跟驅(qū)動器來驅(qū)動電機(jī),只是想用電機(jī)的位置信號),但是旋轉(zhuǎn)編碼器的輸出信號是方波信號,我應(yīng)該怎么處理成正弦波信號呢?比如說轉(zhuǎn)一轉(zhuǎn)輸出一個正弦波,先謝謝大家了。
2017-07-13 10:17:04
電機(jī)的旋轉(zhuǎn)編碼器輸出是5V的脈沖信號,DSP是3.3V供電的,這個接口怎么設(shè)計?
2013-04-08 14:11:56
帶編碼器的步進(jìn)電機(jī),電機(jī)在工作的情況下有時會出現(xiàn)電機(jī)自身的步數(shù)和編碼器測得的步數(shù)不一致的情況!以編碼器測得的步數(shù)和電機(jī)自身的步數(shù)對比,調(diào)整電機(jī)步數(shù),有時會出現(xiàn)調(diào)整后的電機(jī)位置與預(yù)設(shè)位置不符現(xiàn)象,(步進(jìn)電機(jī)步數(shù)準(zhǔn)確,編碼器不準(zhǔn)確?)問下有什么辦法解決沒?
2018-05-09 22:37:31
傳統(tǒng)型編碼器測速方案編碼器,經(jīng)常被用來測量速度或者顯示電機(jī)位置,大致分為絕對值式編碼器和增量式編碼器,顧名思義,相對應(yīng)的是產(chǎn)生增量或者絕對信號。增量信號不表示特定位置,只表示位置已經(jīng)更改;絕對信號
2022-02-23 07:16:13
Tamagawa?)由于可配置時鐘方向,硬件可用作驅(qū)動器和編碼器接口設(shè)計符合 IEC 61800-3 EMC 抗擾度要求
2018-09-30 09:34:58
在本博客系列的第一部分,Martin Staebler提供了各類電機(jī)位置編碼器及其接口的概述。在第二部分中,筆者將對雙向/串行/同步(BiSS)位置編碼器的接口進(jìn)行講解。 BiSS是來自
2018-09-05 16:07:37
作用3.1.2 具體原理3.2 STM32的編碼器接口模式3.2.1 概述3.2.2 編碼器模式配置3.3 使用方法3.3.1 核心3.3.2 代碼部分3.4 編碼器實(shí)物參數(shù)四、 結(jié)尾說明一、 模塊
2021-09-03 08:02:08
相比傳統(tǒng)的光學(xué)編碼器,磁性編碼器有哪些優(yōu)點(diǎn)?磁性編碼器技術(shù)在電機(jī)的旋轉(zhuǎn)位置反饋中有什么應(yīng)用?磁性編碼器有哪些短板?
2021-07-13 08:10:07
描述TIDA-00179 參考設(shè)計是一種符合 EMC 標(biāo)準(zhǔn)的通用數(shù)字接口,用于連接到絕對位置編碼器,例如 EnDat 2.2、BiSS?、SSI 或 HIPERFACE DSL?。該設(shè)計支持
2018-11-09 14:37:40
應(yīng)用最多的傳感器,由于光電碼盤與電動機(jī)同軸,電動機(jī)旋轉(zhuǎn)時,碼盤(光柵盤)與電動機(jī)同速旋轉(zhuǎn),反映當(dāng)前電動機(jī)的轉(zhuǎn)速。它主要由光源、碼盤、光學(xué)系統(tǒng)及電路4部分組成。那下面我們根據(jù)不同種類的光電編碼器進(jìn)行說明
2016-01-26 15:25:43
請問一下運(yùn)動控制卡中伺服電機(jī)的規(guī)劃位置與編碼器位置的區(qū)別是什么?
2021-10-12 11:24:30
旋轉(zhuǎn)編碼器是什么?其工作原理是怎樣的?單片機(jī)與旋轉(zhuǎn)編碼器直接接口的方法有哪些?其接口程序是什么?有什么方法可以對電機(jī)測速部分進(jìn)行測試嗎?
2021-04-15 06:01:40
上料小車傳動電機(jī)(自帶編碼器)帶吸盤實(shí)現(xiàn)上料控制,小車軌道設(shè)置四個位置實(shí)現(xiàn)不同的控制要求。今天更換電機(jī)送電后小車無法實(shí)現(xiàn)精確定位,請問更換帶編碼器的電機(jī)后需要做哪些工作才能實(shí)現(xiàn)原來設(shè)定位置的精確控制。
哪位大師有編碼器實(shí)現(xiàn)位置控制的資料,能不能提供一些作為學(xué)習(xí)參考!!!謝謝!!!
2023-11-10 07:41:01
描述TIDA-00177 參考設(shè)計是連接到兩線 HIPERFACE DSL? 編碼器且符合 EMC 標(biāo)準(zhǔn)的工業(yè)接口。其應(yīng)用包括工業(yè)伺服驅(qū)動。此設(shè)計采用 3.3V 電源 RS485 收發(fā)器,并具備符合
2018-12-19 14:22:05
,具有在整個工業(yè)溫度范圍內(nèi)準(zhǔn)確的限值。此設(shè)計滿足 IEC61800-3 中針對 ESD、快速瞬變脈沖和浪涌的 EMC 抗擾性要求。 特性電源設(shè)計支持具有數(shù)字或模擬接口的廣泛位置編碼器的不同電源電壓要求
2015-04-29 10:54:56
描述TIDA-00176 參考設(shè)計是針對正弦/余弦位置編碼器且符合 EMC 標(biāo)準(zhǔn)的工業(yè)接口。其應(yīng)用包括需精確速度和位置控制的工業(yè)驅(qū)動。 該設(shè)計采用 16 位雙路取樣 ADC 且可使用插入式兼容 14
2018-11-09 17:04:12
光電編碼器在電機(jī)控制中的應(yīng)用
電機(jī)的位置檢測在電機(jī)控制中是十分重要的,特別是需要根據(jù)精確轉(zhuǎn)子位置控制電機(jī)運(yùn)動狀態(tài)的應(yīng)用場合,如位置伺服系統(tǒng)。電機(jī)控制
2009-10-29 22:56:171869 
針對位置檢測的需要,提出了一種光電編碼器 位置檢測 系統(tǒng)。首先闡述了 光電編碼器 的工作原理,并對基于MSP430單片機(jī)位置檢測系統(tǒng)的硬件和軟件系統(tǒng)進(jìn)行了詳細(xì)的論述。結(jié)論證明,
2011-08-02 17:02:09 81
81 EnDat 2.2-位置編碼器雙向數(shù)字接口。
2016-03-14 15:50:0019 電機(jī)位置編碼器廣泛用于伺服驅(qū)動器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2017-04-26 13:16:121274 在本博客系列的第一部分,Martin Staebler提供了各類電機(jī)位置編碼器及其接口的概述。在第二部分中,筆者將對雙向/串行/同步(BiSS)位置編碼器的接口進(jìn)行講解。BiSS是來自iC-Haus公司的開源協(xié)議。它定義了適用于致動器和傳感器(如旋轉(zhuǎn)編碼器或位置編碼器)的數(shù)字雙向串行接口。
2017-04-26 13:24:381179 泰德- 00179參考設(shè)計是一種符合EMC標(biāo)準(zhǔn)的通用數(shù)字接口,用于連接到絕對位置編碼器,例如EnDat 2.2,bis,SSI或HIPERFACE DSL。該設(shè)計支持15-60V(標(biāo)稱24
2017-05-04 16:35:2914 RS485收發(fā)器(包括線路端接和EMC保護(hù))。提供輔助電源和具有可調(diào)的I / O電壓電平的邏輯電平接口,以便連接到將運(yùn)行bis(或SSI)主器件協(xié)議堆棧的后續(xù)單片機(jī)和微控制器。該設(shè)計經(jīng)過全面測試,滿足IEC61800-3中針對ESD,快速瞬變脈沖和浪涌的EMC抗擾性要求。 編碼器(
2017-05-08 17:13:0311 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢。
2017-11-10 16:47:37122899 
電機(jī)位置編碼器廣泛用于伺服驅(qū)動器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2017-11-17 01:53:522544 在本文對雙向/串行/同步(BiSS)位置編碼器的接口進(jìn)行講解。 BiSS是來自iC-Haus公司的開源協(xié)議。它定義了適用于致動器和傳感器(如旋轉(zhuǎn)編碼器或位置編碼器)的數(shù)字雙向串行接口。(更多詳情
2017-11-17 01:55:5715638 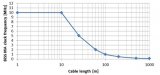
在本系列中,到目前為止,我們已經(jīng)討論了針對電機(jī)位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。 這些是使用基于RS-485
2017-11-17 01:56:011068 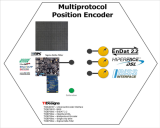
伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢。
2018-02-03 11:34:5559009 正交編碼器接口(Quadrature Encoder Interface,QEI)模塊提供了與用于獲得機(jī)械位置數(shù)據(jù)的增 量式編碼器的接口。正交編碼器(也稱為增量式編碼器或光電式編碼器)用于檢測旋轉(zhuǎn)
2018-06-22 04:20:0014 在伺服電機(jī)的內(nèi)部零件中有一個是用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器叫伺服電機(jī)編碼器,根據(jù)物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2019-11-06 11:34:3411309 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢。
2019-11-07 09:18:539467 的另一個應(yīng)用,即幫助把您選擇的數(shù)字位置編碼器主接口集成入Sitara處理器內(nèi)。
? 首先,讓我們來看下包含位置編碼器的系統(tǒng)層面方塊圖——見圖1。諸如伺服驅(qū)動器等應(yīng)用通常都配有集成了數(shù)字位置反饋編碼器的電機(jī)
2021-11-10 09:38:57494 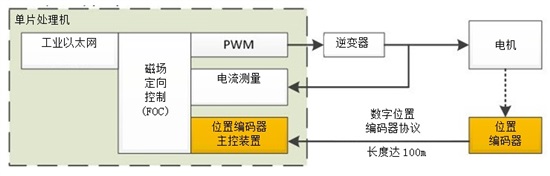
本文介紹工業(yè)自動化領(lǐng)域的設(shè)計人員在設(shè)計用于電機(jī)控制的位置檢測接口時面臨的常見問題,即:能在速度更快、尺寸更小的應(yīng)用中檢測位置。利用從編碼器捕獲的信息以便精確測量電機(jī)位置對于自動化和機(jī)器設(shè)備的成功運(yùn)行很重要。快速、高分辨率、雙通道同步采樣模數(shù)轉(zhuǎn)換器(ADC)是此系統(tǒng)的重要組件。
2022-04-01 13:43:511440 本文介紹工業(yè)自動化領(lǐng)域的設(shè)計人員在設(shè)計用于電機(jī)控制的位置檢測接口時面臨的常見問題,即:能在速度更快、尺寸更小的應(yīng)用中檢測位置。利用從編碼器捕獲的信息以便精確測量電機(jī)位置對于自動化和機(jī)器設(shè)備的成功運(yùn)行很重要。快速、高分辨率、雙通道同步采樣模數(shù)轉(zhuǎn)換器(ADC)是此系統(tǒng)的重要組件。
2022-04-09 11:25:271899 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢。
2023-02-24 11:56:382036 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢。
2023-02-27 17:50:211266 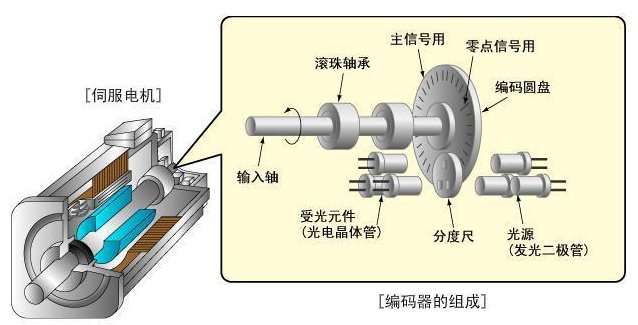
伺服電機(jī)編碼器在更換了相應(yīng)的編碼器以后,基本上都要進(jìn)行相應(yīng)的調(diào)零對位。伺服電機(jī)編碼器調(diào)零對位一般設(shè)計到伺服電機(jī)編碼器的拆除,在拆除伺服電機(jī)編碼器時要對伺服電機(jī)編碼器的安裝位置進(jìn)行記錄,保證伺服電機(jī)的正常云運(yùn)行。?
2023-03-10 16:30:5912569 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢。
2023-03-20 09:12:431279 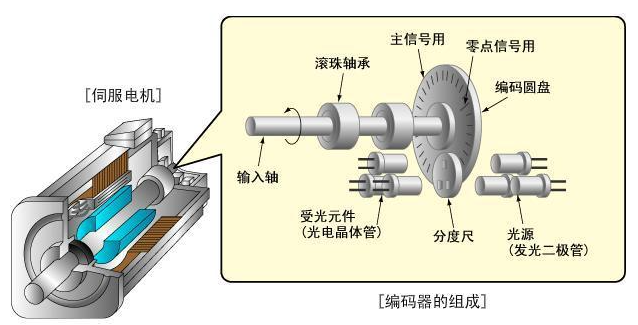
本篇來介紹電機(jī)的位置環(huán)控制,實(shí)現(xiàn)電機(jī)快速準(zhǔn)確地轉(zhuǎn)動到指定位置。回顧上篇,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來看電機(jī)位置PID
2023-05-06 11:50:367 從具有位置和電流反饋的定速電機(jī)轉(zhuǎn)向具有位置和電流反饋的變速電機(jī),為節(jié)省大量工藝和能源提供了一條途徑。本文概述了電機(jī)編碼器(位置和速度),包括類型和技術(shù)以及應(yīng)用用例。它還回答了關(guān)鍵問題,例如哪些編碼器
2023-06-15 09:55:05727 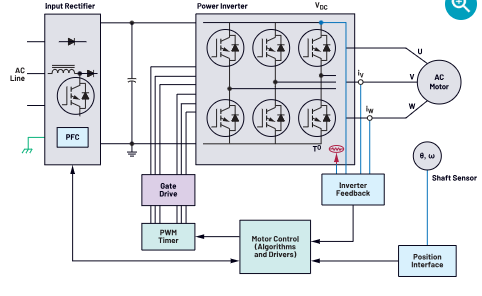
伺服電機(jī)編碼器 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2023-06-26 14:01:01900 單圈和多圈編碼器是用于測量伺服電機(jī)轉(zhuǎn)動位置的裝置,它們之間的區(qū)別主要在于測量范圍和精度: 單圈編碼器:單圈編碼器只能測量一圈(360度)的轉(zhuǎn)動位置。它通常由光電傳感器或磁性傳感器組成,可以提供較為
2023-07-12 08:15:061298 (1)在數(shù)控機(jī)床中,伺服電機(jī)位置模式常用于驅(qū)動進(jìn)給軸。通過位置模式,可以實(shí)現(xiàn)對切削工具的精確位置控制,以實(shí)現(xiàn)高精度的加工操作。 (2)在自動化生產(chǎn)線中,伺服電機(jī)位置模式常用于驅(qū)動定位裝置、機(jī)械
2023-08-15 08:25:01484 知道轉(zhuǎn)子的磁極位置,這樣才能夠大力矩啟動伺服電機(jī),這樣需要另外配幾路信號來檢測轉(zhuǎn)子的當(dāng)前位置,比如增量型的就有UVW等信號,正因?yàn)橛辛诉@幾路檢測轉(zhuǎn)子位置的信號,伺服編碼器顯得有點(diǎn)復(fù)雜了,以致一般人弄不懂它的道理了,加上有些廠家故意掩遮一些信號,相關(guān)的資料不齊全,就更加增添了伺服電機(jī)編碼器的神秘色彩。
2023-08-23 10:58:11888 伺服電機(jī)編碼器原理伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī)
2023-08-25 08:08:541018 
伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上
2023-08-25 08:09:031593 知道轉(zhuǎn)子的磁極位置,這樣才能夠大力矩啟動伺服電機(jī),這樣需要另外配幾路信號來檢測轉(zhuǎn)子的當(dāng)前位置,比如增量型的就有UVW等信號,正因?yàn)橛辛诉@幾路檢測轉(zhuǎn)子位置的信號,伺服編碼器顯得有點(diǎn)復(fù)雜了,以致一般人弄不懂它的道理了,加上有些廠家故意掩遮一些信號,相關(guān)的資料不齊全,就更加增添了伺服電機(jī)編碼器的神秘色彩。
2023-09-22 14:19:58499 ,同步電機(jī)啟動的時候需要知道轉(zhuǎn)子的磁極位置,這樣才能夠大力矩啟動伺服電機(jī),這樣需要另外配幾路信號來檢測轉(zhuǎn)子的當(dāng)前位置,比如增量型的就有UVW等信號,正因?yàn)橛辛诉@幾路檢測轉(zhuǎn)子位置的信號,伺服編碼器顯得有點(diǎn)復(fù)雜了,以致一般人弄
2023-09-25 14:07:17974 無磁鐵雙線圈技術(shù)為機(jī)器人、工業(yè)和醫(yī)療設(shè)備中使用的電機(jī)位置傳感器及編碼器帶來高分辨率、高精度和高可靠性
2023-10-27 10:00:55538 伺服電機(jī)編碼器是一種關(guān)鍵的反饋裝置,用于測量和控制電機(jī)的轉(zhuǎn)速和位置。在選擇伺服電機(jī)編碼器時,常常面臨一個選擇:使用磁電編碼器還是光電編碼器。接下來將從幾個關(guān)鍵方面比較這兩種類型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:02464 伺服電機(jī)編碼器調(diào)零對位是指通過調(diào)整編碼器的零位來使得電機(jī)的位置精準(zhǔn)對位。編碼器是一種能夠?qū)⑽锢砹哭D(zhuǎn)換為電信號的裝置,它可以測量電機(jī)轉(zhuǎn)動的角度或位置。 在進(jìn)行伺服電機(jī)編碼器調(diào)零對位之前,我們首先要
2024-01-25 11:32:08647 編碼器零點(diǎn)位置怎么看 要確定編碼器的零點(diǎn)位置,可以通過以下幾種方式進(jìn)行觀察: 1. 物理標(biāo)記點(diǎn):一些編碼器在其旋轉(zhuǎn)軸上具有專門的物理標(biāo)記點(diǎn),例如凹槽或凸起。通過觀察軸上的標(biāo)記點(diǎn),可以確定零點(diǎn)位置
2024-02-18 18:28:19737 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論