交流伺服驅動系統的硬件是軟件設計的基礎,所以本文的主要任務是根據工業機器人伺服驅動系統的特點,對系統的的硬件進行設計。
2014-05-15 11:13:45 3395
3395 工業機器人有4大組成部分,分別為本體、伺服、減速器和控制器。而其中,工業機器人電動伺服系統的一般結構為三個閉環控制,即電流環、速度環和位置環。一般情況下,對于交流伺服驅動器,可通過對其內部功能參數進行人工設定而實現位置控制、速度控制、轉矩控制等多種功能。
2022-09-09 14:21:381713 8.5部分實例
2015-03-12 17:44:47
什么是伺服系統?伺服系統是由哪些部分組成的?伺服驅動器的原理是什么?伺服控制系統有哪幾種控制方式?
2021-10-11 08:03:33
普通交流馬達,屬于伺服系統的一部分,主要應用于的定位系統M64參數設置教程。一般是通過位置、速度和力矩三種方式對伺服馬達進行控制,實現的傳動系統定位,目前是傳動技術的產品M64伺服驅動器是現代運動控制的重...
2021-09-06 07:22:42
伺服驅動器簡單地說:是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過位置、速度和力矩三種方式對伺服馬達進行控制,實現
2021-06-28 08:16:24
電機內部的編碼器把數據反饋給運動控制卡來進行閉環。就是通過同一個編碼器把信息反饋給不同的對象。一個是伺服驅動器內部廠家設計好的,另一個就是自己的上位裝置。本人用的是安川7系列的驅動器和電機,驅動器上面的CN1上的A,B,C相信號線到底輸出的是什么?編碼器數據不是已經反饋給了伺服驅動器了嗎?難道這兩個是并聯的?
2017-12-19 21:48:30
伺服驅動器按照其控制對象由外到內分為位置環、速度環和電流環,相應伺服驅動器也就可以工作在位置控制模式、速度控制模式和力矩控制模式。
2019-11-05 09:01:59
伺服系統的一部分,那么它主要是用來起到定位的作用。 伺服電機驅動器要想很好的控制和定位馬達呢?主要是通過以下這三種方式: 1、其位置
2021-06-28 11:19:54
伺服電機是否必須有對應的伺服驅動器來控制?沒有伺服驅動器能使用伺服電機嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
線槽與轉子磁鐵相互作用所引起的伺服電機內部扭矩紋波。所有這些都能改善電機的低速性能,最終增強成品的精度和表面質量。 驅動架構 如上所述,驅動系統性能由多個方面決定,例如控制架構、電機設計、功率電路、反饋
2020-07-01 08:00:00
伺服系統由哪幾部分組成?伺服系統常用的參數有哪些?如何選擇伺服電機?伺服驅動器控制原理是什么?
2021-09-26 08:26:53
伺服電機有哪些應用實例?工業伺服電機由哪幾個主要組成部分?工業伺服電機Mechaduino特點有哪些?
2021-06-28 09:41:18
工業控制機的哪幾個部分組成?各部分的主要作用是什么?工業控制機的特點有哪些?1.5 什么是總線、內部總線和外部總線?1.6 PC總線和STD 總線各引線的排列和含義是怎樣的?1.7 RS-232C 和 ...
2021-09-01 06:40:38
在這個系列的第一篇博文中,我們了解到FPGA是如何被引入到驅動架構中的。現在,我們來看一看在一個工業驅動/伺服機架構中使用FPGA時遇到的一些挑戰,以及以COTS MCU形式運轉的控制片上系統
2018-08-31 15:06:33
的C2000™ F28379 MCU,開發人員現在可以避免上文提到的很多缺點。
在本系列的下一部分中,我們進一步研究將FPGA引入到驅動和伺服機控制架構中時所遇到的其它挑戰。
原文鏈接
2018-08-31 15:41:28
工業機器人中的伺服驅動的目的是什么?工業機器人中的關節內部驅動結構是怎樣構成的?
2021-10-11 08:37:43
工業機器人的產業鏈分為上游核心零部件,中游本體和傳感器等生產,以及下游的系統集成等。核心零部件是減速機、伺服系統、控制系統三部分,分別對應執行系統、驅動系統、控制系統,分別占成本的35%、25
2017-08-23 15:10:27
一些良好的干凈的怪異樂趣。對于那些使用過不同EDA工具的人,我希望easyEDA.com的一瞥至少是有趣的,如果不是鼓勵,如果你想嘗試不同的東西。在本系列的第2部分中,我將分享我對KiCad的經歷
2018-11-01 15:54:02
Wind Turbine (Part 1) 垂直軸風力機(第1部分)以ANSYS 17.0為例。該算例分為兩個部分,第一部分將采用運動參考系(Moving Frame of Reference(MRF...
2021-07-12 06:38:54
本帖最后由 飛兒朵朵2012 于 2016-11-3 22:20 編輯
GB 7000.1-2015 燈具 第1部分:一般要求與試驗
2016-09-18 22:02:20
GBT 20234.2-2015 電動汽車傳導充電用連接裝置 第2部分 交流充電接口
2018-03-22 08:02:30
IEC 62305-1(雷電防護 第1部分 總則)前言3簡介31. 范圍和目標.42. 規范性參考文件.43. 術語和定義.44. 雷擊電流參數... 95. 雷電的損害... 95.1 對建筑物
2011-01-22 17:03:54
ORCAD同一個分裂的元器件,經過annotate之后,一部分的位號是U1,另一部分的位號為U2了,請問是什么問題,謝謝!
2016-11-23 17:47:31
PADSlogic電子檔第2部分有需要的可以下載
2013-09-21 18:00:38
Protel99se 安裝好了,一部分ddb文件能打開,一部分pcb格式打不開,該怎么辦
2011-12-21 20:14:15
TCL 9321/9421部分/9621部分(TDA3505/TEA1014)原理圖文件下載
2021-06-25 08:32:05
YY 0505-2012 醫用電氣設備 第1-2部分 安全通用要求并列標準 電磁兼容 要求和試驗 (見附件)
2015-06-03 12:49:54
plc控制伺服電機的下位機系統有什么程序?伺服電機的控制方式包括哪幾種?plc控制伺服電機的上位機系統有什么功能?
2021-06-28 07:14:41
伺服驅動器簡單地說:是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過位置、速度和力矩三種方式對伺服馬達進行控制,實現
2021-06-28 08:06:46
使用高速轉換器時,有哪些重要的PCB布局布線規則?(第2部分)本RAQ的第一部分討論了為什么AGND和DGND接地層未必一定分離,除非設計的具體情 況要求您必須這么做。第二部分討論印刷電路板(PCB
2018-10-30 14:57:01
的 IP 內核 – 第 I 部分軟 IP,第二部分:水印保護您的 IP 內核——第一部分軟 IP,第三部分:設計的混淆保護您的 IP 內核 – 第 I 部分軟 IP,第四部分:指紋識別保護您的 IP
2022-02-23 11:59:45
GB 9706.1-2007 醫用電氣設備 第1部分:安全通用要求
2014-12-23 16:12:22
在大家初學編程的時候,總會讀一些程序,可是讀完程序之后,只能看明白一小部分的程序。有時候會摸不著頭腦。下面我就給大家說說編程的架構。了解了程序的架構,在讀起來程序就輕松多了。其實架構就是程序的編程思路。
2019-10-25 07:38:54
在STM32中執行中斷主要分三部分:1.配置NVIC_Config()函數2.配置EXTI_Config()函數3.編寫中斷服務函數(注:本文章所用代碼為中斷按鍵代碼,實現了按鍵進入中斷從而控制
2021-08-13 08:10:37
在STM32中執行中斷主要分三部分:1.配置NVIC_Config()函數2.配置EXTI_Config()函數3.編寫中斷服務函數(注:本文章所用代碼為中斷按鍵代碼,實現了按鍵進入中斷從而控制
2021-08-20 07:53:57
布局電源板以最大限度地降低EMI:第2部分
2019-09-06 08:49:33
布局電源板以最大限度地降低EMI:第1部分
2019-09-05 15:36:07
問題:1.第1部分看懂一點,第2部分完全不知道要干什么,第3部分那樣處理也不知道是要做什么。2.這個電路要實現的功能是一個從幾十到幾百赫茲的帶通濾波。3.已經用Multisim仿真過,得到的結果是
2018-07-26 10:00:39
構建混合測試系統第1部分:為成功過渡奠定基礎
2019-11-06 09:36:06
DN110- 微功率降壓/升壓電路,第2部分:將四節電池轉換為5V *
2019-06-11 16:31:41
怎么用Labview直接控制伺服驅動器?是通過接口向伺服驅動器輸入指令代碼嗎?我在說明書上沒看到上位機控制的例子,求大神解惑。
2016-04-14 23:43:49
。圖1.抽取系數為8時,每8個樣本僅選擇第8個樣本,拋棄7個樣本。你們猜猜第二個問題是什么?在第2部分中,我們將看看其他常見問題之一,敬請期待。
2018-10-26 11:16:21
伺服技術是跟蹤與定位控制技術,是機電一體化技術的重要組成部分,它廣泛地應用于數控機床、工業機器人等自動化裝備中。隨著現代工業生產規模的不斷擴大,各個行業對電伺服系統的需求日益增大,并對其性能提出
2019-09-03 07:06:57
本帖最后由 eehome 于 2013-1-5 10:01 編輯
獨特的51單片機教程第三部分—牛人經驗,論壇獨家奉獻指令系統 與 尋址方式 按照順序,今天該到說指令系統的時候了,要說指令系統
2011-11-17 11:18:50
/jishu_209171_1_1.html附上上幾次的地址:獨特的51單片機教程第一部分https://bbs.elecfans.com/jishu_208370_1_3.html獨特的51單片機
2011-11-18 09:59:18
://bbs.elecfans.com/jishu_209171_1_1.html獨特的51單片機教程第一部分https://bbs.elecfans.com/jishu_208370_1_1.html獨特的51
2011-11-16 09:48:37
本帖最后由 eehome 于 2013-1-5 10:01 編輯
獨特的51單片機教程第四部分:基本IO操作和 定時器/計數器 前面的之三寫得很辛苦。我當時說,這一篇對于你直接點亮 LED
2011-11-21 09:28:27
Hercules微控制器來驅動它。圖1顯示的是將用來驅動LMG5200的Hercules模塊。
圖1:具有死區發生器的Hercules PWM模塊
GaN與Hercules功率級是天生的一對兒。它們在工業和汽車
2018-08-31 07:15:04
用單片機控制伺服驅動器控制交流伺服電機。用什么單片機呢?跪求大神。求例程,求助~~~~~~~~~~
2014-04-21 21:02:51
移動應用軟件及耗電量–基本知識, 第1部分盡管對應用軟件的耗電量進行優化并不難,但是大多數應用軟件開發者對此并不了解。在我們今年的Uplinq? 大會上,我辦了一場名為“最低耗電量、最佳性能”的會議
2018-09-20 11:59:30
STM32標準庫的引入視頻課程-第3季第6部分 互聯網課程品牌《朱老師物聯網...
2021-08-03 06:31:06
[tr=transparent]如下圖,是TI運放穩定性合集(第10部分)關于雙反饋電路補償(圖中FB#1改成FB#2),最后兩個圖是關于FB#2反饋路徑傳遞函數和零極點的推導,求解,圖中畫紅線
2018-02-28 16:12:33
在學習運算放大器穩定性分析(TI合集)第5部分的時候,計算beta是有點疑惑,為什么beta = VFB / delta VOA ?而不是beta = VFB / VOA?
2022-04-01 10:21:51
; Elmo Application Studio (EAS) 軟件工具可以輕松地設置調節伺服驅動器,作為 Elmo 的 Gold 系列伺服驅動器的一部分,可借助
2022-06-23 13:57:39
的正弦波和梯形波換相,以及矢量控制。既可以單獨使用,也可以作為實時網絡分布式多軸運動系統的一部分使用。作為 Gold 系列伺服驅動器的一部分,Gold Drum 可以
2022-07-06 11:11:32
部分:通用要求》6.3鎖止裝置、6.4插拔力、6.11分斷能力、6.12使用壽命;GB/T 11918.1-2014《工業用插頭插座和耦合器 第1部分:通用要求》2
2023-12-01 09:22:11
在這個系列的第一篇博文中,我們了解到FPGA是如何被引入到驅動架構中的。現在,我們來看一看在一個工業驅動/伺服機架構中使用FPGA時遇到的一些挑戰,以及以COTS MCU形式運轉的控制片上系統 (SoC) 的全新功能如何用FPGA來改變針對工業驅動的成本有效模型。
2017-04-26 12:17:392013 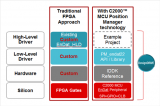
伺服驅動器是用來控制伺服電機的一種控制器,伺服驅動器其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分。目前主流的伺服驅動器均采用數字信號處理器(DSP)作為控制核心,可以實現比較復雜的控制算法,實現數字化、網絡化和智能化。
2017-06-08 10:37:0711016 GTSD14系列通用型智能伺服驅動器是一款由工業PC、運動控制和伺服驅動有機結合的控制、驅動一體化產品,功率涵蓋3kW-45kW。高度集成的系統架構極大簡化了客戶的電氣設計,提高了設備性能和可靠性
2017-10-10 17:37:33 13
13 伺服驅動器是用來控制伺服電機的一種控制器,一般是通過位置、速度和力矩3種方式對電機進行控制,實現高精度的系統定位。目前,伺服控制器CPU的架構主要有:1)單CPU架構ARM( acorn RISC
2018-01-29 16:33:531 伺服驅動器(servo drives)作為工業自動化的重要一環,又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過
2018-06-29 11:55:002836 市面上的伺服驅動器CPU的架構主要有單ARM控制器和單DSP控制器。單ARM控制器方案在通信和控制方面存在優勢,但是復雜算法在實現的時候往往會因為運算耗時而降低整個系統實時性;單DSP控制器方案中在算法中存下優勢,但是在對外通信和控制方面往往會實現起來比較復雜。
2019-08-20 09:26:333749 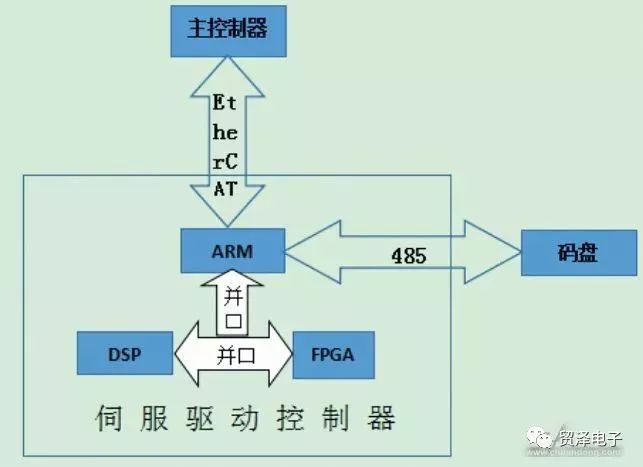
安川伺服驅動器又叫安川伺服控制器”、安川伺服放大器”,用來控制伺服電機的驅動器,近似于變頻器驅動交流電機,屬于伺服系統的一部分,一般應用在高精度的定位系統。通過位置、速度和力矩三種方式對伺服馬達進行
2021-08-04 09:15:105044 安川伺服驅動器又叫安川伺服控制器”、安川伺服放大器”,用來控制伺服電機的驅動器,近似于變頻器驅動交流電機,屬于伺服系統的一部分,一般應用在高精度的定位系統。通過位置、速度和力矩三種方式對伺服馬達進行
2021-08-06 20:26:545096 伺服驅動器簡介 伺服驅動器(servo drives)又稱為"伺服控制器"、"伺服放大器",是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于
2022-11-21 08:56:031516 控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的。一般是通過位置、速度和力矩三種方式對伺服馬達進行控制,實現高精度的傳動系統定位,目前
2022-12-02 08:37:451661 馬達,屬于伺服系統的一部分,主要應用于高精度的系統。一般是通過位置、速度和力矩三種方式對伺服馬達進行控制,實現高精度的傳動系統,目前是傳動技術的高端產品。 驅動器相關參數 在自動化設備中,經常用到伺服電機,特別是位置控制, 大部分品牌的伺服電機都有位置控制功能,通過控制器發出
2022-12-30 08:35:331744 伺服驅動器又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過位置、速度和力矩三種
2023-03-07 09:52:4025147 伺服電機通常由以下幾個主要部分組成:
電機部分:伺服電機的電機部分一般由轉子、定子、繞組、磁極等部件組成。電機的類型包括直流伺服電機、交流伺服電機、步進伺服電機等,每種類型的電機在結構和控制方式上都有所不同。
2023-03-07 15:14:586213 伺服控制系統和伺服驅動器是兩個不同的概念。
2023-03-21 17:10:212277 伺服驅動器是現代運動控制的重要組成部分,被廣泛應用于工業機器人及數控加工中心等自動化設備中。尤其是應用于控制交流永磁同步電機的伺服驅動器已經成為國內外研究熱點。當前交流伺服驅動器設計中普遍采用
2023-05-17 10:04:201059 從宏觀上看,伺服驅動器主要分為功率板和控制板兩大塊,其中功率板是強電部分,控制板屬于弱點部分。 功率板又可以細分為兩個單元,即功率驅動單元IPM和開關電源單元。 這里面,功率驅動單元用于電機的驅動
2023-05-23 07:35:021659 作為現代工業運動控制的重要組成部分,低壓伺服驅動器通過力矩、速度、位置三種方式對伺服電機進行精準控制
2023-06-19 16:45:38448 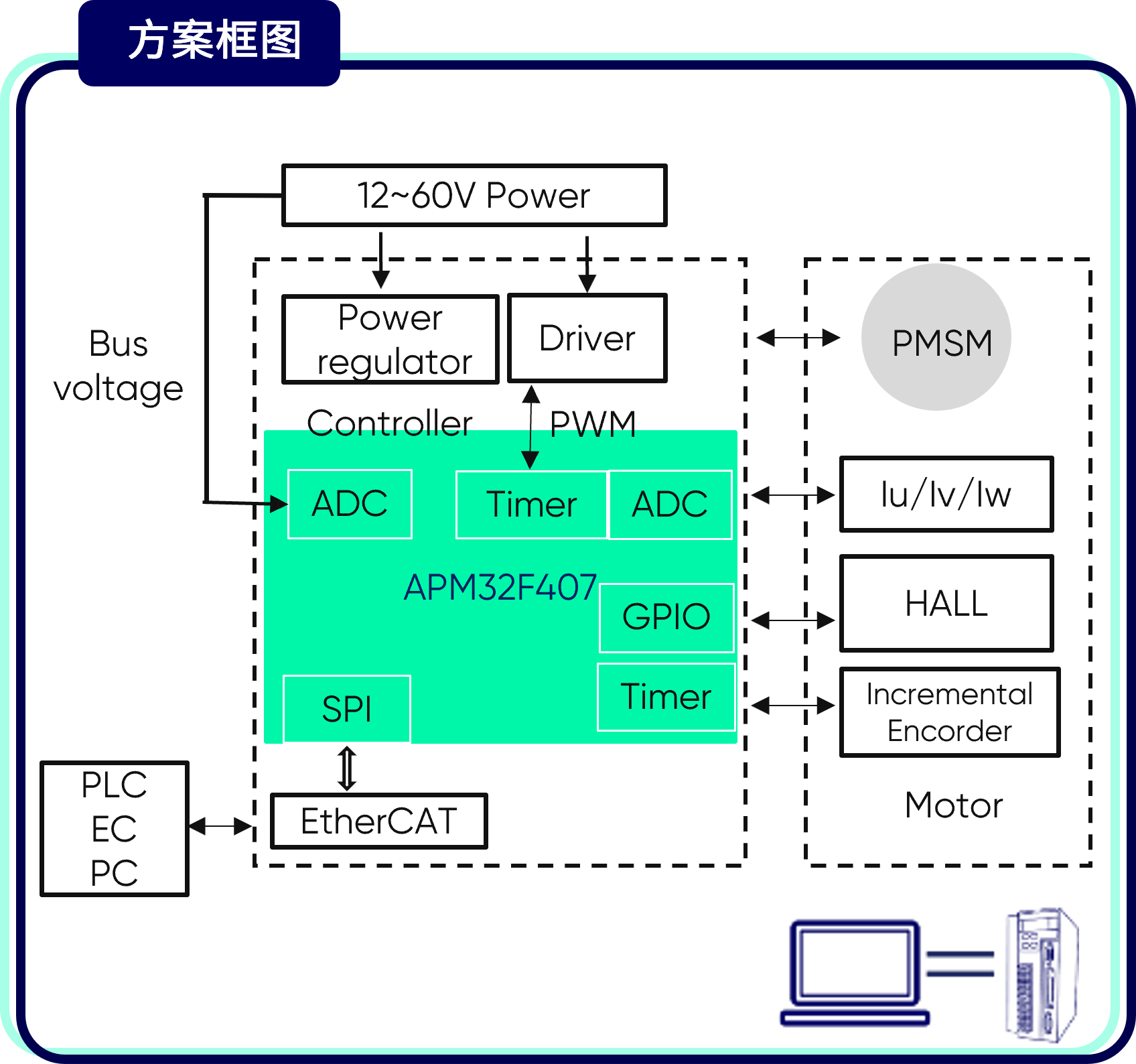
在現代工業領域,伺服驅動器是一種關鍵的電氣裝置,它在機器控制和運動控制系統中發揮著至關重要的作用。無論是工業機器人、數控機床還是自動化生產線,伺服驅動器都是實現精準位置控制和高效運動控制的關鍵組件。本文將介紹伺服驅動器的工作原理、應用領域以及在現代工業中的重要作用。
2023-08-21 17:34:022335
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論