在講校準之前,先介紹一下網絡分析儀的“系統誤差模型”。如果你去看各種論文或書籍,都喜歡給你下面這張圖,然后列一大堆公式,先把你搞暈,這個是傳統的10項誤差模型。也有文獻叫12項誤差模型,包含了2個isolation誤差項,但是現代網分基本做得很好了,這個項可以忽略,故大部分都講10項誤差模型。
2023-08-25 09:48:13 252
252 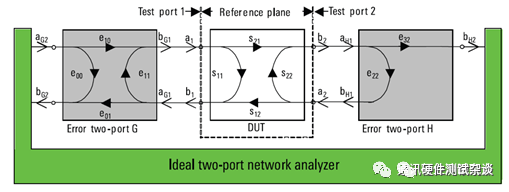
霍爾效應實驗是一個受系統誤差影響較大的實驗,特別是在霍爾效應產生的同時,伴隨產生的其他效應引起的附加電場對實驗影響較大。霍爾效應產生誤差的原因主要有以下幾點:
2023-07-03 17:17:04837 矢量網絡分析儀的誤差來源主要有以下三個方面:漂移誤差、隨機誤差、系統誤差 1、漂移誤差:是由于進行校準之后儀器或測試系統性能發生變化所引起,主要由溫度變化造成。 2、隨機誤差:是不可預測的且不
2023-01-05 15:20:08228 
降低制造成本的同時,有效地提高了光學系統的可實現性,因此降低誤差敏感度是光學系統設計應考慮的重要環節。本文分析了光學系統誤差敏感度研究現狀,總結了典型的光學系統降敏方法,并對這些方法在光學系統設計中的應用進行概述。最后,對光學系統低誤差敏感度設計方法的未來發展進行了展望。
2022-11-14 10:07:23513 示波器是用來測量交流電或脈沖電流波的形狀的儀器,由電子管放大器、掃描振蕩器、陰極射線管等組成。那么示波器實驗系統誤差產生原因哪有哪幾種?
2022-10-27 15:48:47610 
矢量網絡分析儀的誤差來源主要有以下三個方面:漂移誤差、隨機誤差、系統誤差1、漂移誤差:是由于進行校準之后儀器或測試系統性能發生變化所引起,主要由溫度變化造成。2、隨機誤差:是不可預測的且不能通過校準
2022-09-14 09:48:38223 
;nbsp; 誤差多數情況下是指測量誤差,它的傳統定義是測量結果與被測量真值之差。通常可分為兩類:系統誤差和偶然誤差。誤差是客觀存在的,它應該是一個確定的值,但由于在絕大多數情況下,真值是不知道的,所以真
2010-05-05 14:42:02
矢量網絡分析儀的誤差來源主要有以下三個方面:漂移誤差、隨機誤差、系統誤差。
2022-09-13 16:08:321037 
網絡分析儀校準的目的是消除測試的系統誤差。校準的思路是通過對標準件的測試得到網絡分析儀系統誤差項的具體數值,然后通過計算對被測件測試結果進行修正處理,消除其中誤差成份,得到被測件真實值。在談進階篇之前,我們先來復習一下基礎知識。
2022-08-10 09:19:271969 旋進旋渦流量計誤差處理方法的主要目的是預防誤差產生,因此需要采用這些方法對相關誤差因素進行處理,下文將對具體方法進行論述。
2022-02-17 09:09:22858 。CRC利用范數正則化來解決測試樣本的線性表示問題,以期得到一個較穩定的數值解。已有研究表明,正則化參數的選擇對協同表示的數值穩定性起著非常重要的作用。文中提岀了一種新的基于測試樣本誤差重構的協同表示分類
2021-05-28 16:32:49 5
5 之前,都是需要作系統誤差校準的,目的就是將測試裝置本身引入的誤差項修正掉,得到DUT真實的S參數。 系統誤差校準可分為單端口和雙端口系統誤差校準,前者主要用于測試單端口器件的反射系數及其衍生參數,后者主要測試雙端
2021-01-06 14:19:391984 在信息采集系統中,傳感器通常處于系統前端,即檢測和控制系統之首,它提供給系統處理和決策所必需的原始信息,因此,傳感器的精度對整個系統是至關重要的。在位移、速度及加速度的測量中,經常使用差動變壓器式
2020-12-04 10:05:332619 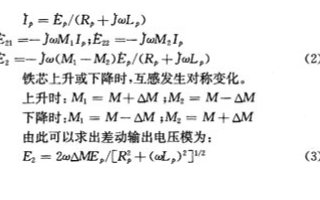
之前,都是需要作系統誤差校準的,目的就是將測試裝置本身引入的誤差項修正掉,得到DUT真實的S參數。 系統誤差校準可分為單端口和雙端口系統誤差校準,前者主要用于測試單端口器件的反射系數及其衍生參數,后者主要測試雙端
2020-12-02 14:23:205100 隨機誤差是許多微小的、獨立的、不可分割的系統誤差的統計綜合。或者說,它是多種因素造成的許多微小誤差的總和。
2020-08-24 15:00:561620 三坐標測量儀除了定位誤差,直線度誤差,角運動誤差,垂直度誤差這四個幾何誤差之外,還有由于力變形、熱變形、測量系統、測頭系統、控制系統、數據記錄和處理系統產生的誤差。
2020-05-15 10:36:395283 1-1 .研究誤差的意義是什么?簡述誤差理論的主要內容。答: 研究誤差的意義為: (1) 正確認識誤差的性質,分析誤差產生的原因,以消除或減小誤差; (2) 正確處理測量和實驗數據,合理計算所得結果
2020-04-22 08:00:003 一、按誤差出現的規律分類:按誤差出現的規律,誤差可分為系統誤差、 隨機誤差和粗大誤差三類。
2020-03-11 08:00:001 根據引入誤差的設備不同,分別介紹了兩種誤差實時校正方法——信號采集部分的實時誤差校正和輸出設備的實時誤差預校正的原理和實現方法。 兩種誤差實時校正方法具有簡單、實現方便、速度快和精度高等特點,在采集原始圖像的同時,既可以存儲系統誤差校正后的圖像文件,又可以在監視屏實時顯示逼真的原圖像.
2019-11-22 17:17:4018 在測定之前,要求檢測人員在檢測過程中可能產生的系統誤差進行認真的分析,必須盡可能預見一切可能產生系統誤差的來源,并設法消除或盡量減弱其影響。
2019-11-10 07:33:0020412 根據測量誤差的性質(或出現的規律),產生的原因,測量誤差可分為系統誤差、隨機誤差和粗大誤差三類。
2019-11-02 06:12:0063803 系統誤差,指的就是測量器具或方法引起的有規律的誤差,體現為與真值之間的偏差,如儀器零點誤差,經年變化誤差,溫度、電磁場等環境條件引起的誤差,動力源引起的誤差等。這種誤差的值和符號保持不變,或測量條件
2019-07-01 16:25:17668 (ppm) 之間進行轉換,以確保總體系統誤差的正確計算。 線性器件數據表中的大多數誤差是折算到輸入端的 (RTI)。將誤差折算到輸入端有三個主要的好處:他將輸出上總體誤差的每一個誤差源分離開來,不需要知道器件增益,并且簡化了
2018-04-17 09:05:0110647 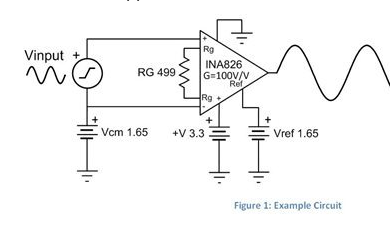
的雷達系統誤差分離方法。通過處理某飛行任務的大量測量數據,估算出了不同航路的雷達動態測距、測角系統誤差和隨機誤差。結果表明雷達測距系統誤差與斜距成正比;測角系統誤差為設計指標的2倍多;其隨機誤差與設計指標相符。
2018-03-06 11:44:000 實際上由于各種系統誤差和偶然誤差的存在,導致了這兩層圖形的位置發生了偏離,也就是通常所說的出現了套刻誤差[1] 。
2018-01-18 11:40:4510574 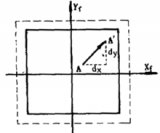
針對用于激光焊接的關節型工業機器人運動誤差控制問題,根據關節型工業機器人伺服控制和運動學原理,分析了機器人運動誤差的積累過程,并對運動誤差和伺服系統誤差分別進行了測量和比較。結果表明,伺服系統誤差是運動誤差的重要組成部分。該結論對機器人激光焊接的路徑控制具有一定參考意義。
2017-10-12 18:19:066 (ppm) 之間進行轉換,以確保總體系統誤差的正確計算。 線性器件數據表中的大多數誤差是折算到輸入端的 (RTI)。將誤差折算到輸入端有三個主要的好處:他將輸出上總體誤差的每一個誤差源分離開來,不需要知道器件增益,并且簡化了
2017-04-17 20:58:321242 
本文針對半閉環伺服壓裝系統的誤差特點,設計使用剛性塊作為輔助裝置進行誤差標定,并通過最小二乘法擬合和誤差表格插值,實現誤差的補償。經過對隨機選取的實際生產數據進行誤差補償并與數顯千分表實測值進行對比分析后得,補償后的誤差可以控制在1%左右,極大地提高了零部件壓裝合格判定的準確度。
2015-12-24 16:05:2512 設計了一種基于V/I轉換電路的電流跟隨器。對一種常見形式的V/I轉換電路進行變形,得到一個存在一定系統誤差的電流跟隨器。通過對系統誤差的分析,針對誤差產生的主要因素提出了
2013-09-25 16:14:45161 針對衛星定位信息誤差形成的原因和組成,分析了幾何精度因子在誤差形成中的影響,在對誤差分析的基礎上提出了一種誤差處理的數學模型,采用卡爾曼濾波的方法對誤差進行處理。實驗
2011-11-04 11:25:0269 提出一種基于綜合智能計算的數控系統位置控制方法,其基本思想是,在現有的數控系統內部嵌入一個神經網絡的小型系統(采用插件形式嵌入),利用綜合智能計算,得出系統補償誤差,實現對
2011-05-19 15:41:4030 3.1 誤差的概念與分類 3.1.1 測量誤差的概念及表達式 3.1.2 測量誤差的分析 3.2 隨機誤差的處理 3.2.1 隨機誤差的概率分布 3.2.2 被測量真值和測量方差的估計值 3.2.3 測量結果的置信度與表示方法 3.3 系統誤差的處理 3.3.1 系統誤差的分類 3.3.2 判斷系統誤
2011-03-13 20:19:0985 誤差分析與處理基礎
測量:人們借助于檢測儀表通過實驗方法對客觀事物取得數量信息的過程。真值:在一定時間、空間條件下客觀存在的被測量的確定數值。測量值
2010-11-06 15:05:1126 在相同的觀測條件下,對某一量進行一系列測量,如果測量誤差在大小和符號上呈現一致性,即按一定的規律變化或保持為常數,這種誤差稱之為系統誤差。系統誤差具有積累性
2010-10-22 16:23:3215 在閉合導線測量中,導線邊如果存在系統誤差, 解算結果仍可能滿足現行規范中的各項精度指標。通過一項邊長接近的閉合導線測量實例,分析了產生誤差的原因 對策,解算出
2010-10-14 16:18:5017 測量誤差的分類和測量結果的表征
3.2 測量誤差的估計和處理
3.3 測量不確定度
3.4 測量數據處理(有效數字的處理)
2010-09-07 15:53:109 1 引言
本文針對PID控制的特點,設計了一種積分分離的控制方法,即當系統誤差較大時,取消積分環節,避免由于積分累積引起系統較大的超調;當系統誤差較小時
2010-08-29 11:57:11790 
•導致測量不確定的因素
–儀器設備原理不完善、精度低
–環境因素的影響:溫度、風速、濕度、氣壓…
–測量人員相關因素:責任心、
2010-08-23 17:25:0213 本設計指南探討了信號調理、調整和校準電路,用于修正系統誤差,從而以合理的成本確保工業設備安全、精確。校準部分討論了利用最終測試補償元件誤差,通過上電自測試和連
2010-07-30 11:34:328 本設計指南探討了信號調理、調整和校準電路,用于修正系統誤差,從而以合理的成本確保工業設備安全、精確。校準部分討論了利用最終測試補償元件誤差,通過上電自測試和連
2010-07-27 18:09:20628 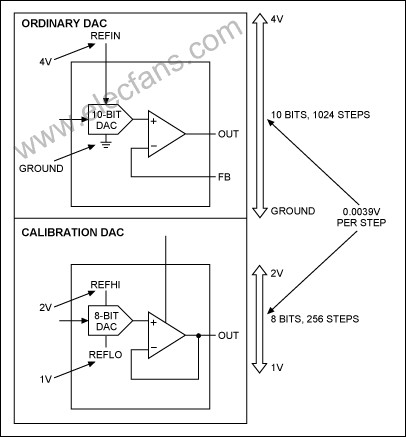
本設計指南探討了信號調理、調整和校準電路,用于修正系統誤差,從而以合理的成本確保工業設備安全、精確。校準部分討論了利用最終測試補償元件誤差,通過上電自測試和連
2010-07-24 12:08:27556 主要內容1. 誤差分類 ①按誤差源分: 原理誤差、制造誤差、運行誤差(方案、理論誤差) (工藝) (使用、環境、磨損) ②. 按數學特征分: 系統誤差、
2010-07-04 12:59:3720 對測量誤差的一些術語、概念、常用誤差處理方法和檢測系統的一般靜態、動態特性及主要性能指標作一扼要的介紹。
1.1檢測系統誤差分析基礎1.1.1 誤差的基本概念1.
2010-03-22 22:27:5720 現代檢測技術:1.2 系統誤差處理1.2.1 系統誤差的特點及常見變化規律系統誤差的特點: 出現的有規律性。系統誤差的產生原因一般可
2010-03-19 08:54:5724 誤差理論及數據處理教材(復習精華)研究誤差的意義:1.正確認識誤差的性質,分析誤差產生原因,以減小或消除誤差;2.正確處理測量和實驗數據,合理
2010-02-23 16:54:2345 現代測量誤差概念的內涵與外延:]誤差和精度是測量平差與數據處理研究的最基本單元。文章對現代測量學科中的誤差重新進行定義與分類,依據誤差的分類對精度作更加明確而直觀
2010-01-08 18:14:467 首先,建立測速儀與慣性測量單元的組合導航狀態方程、量測方程和車載組合導航定位系統的卡爾曼濾波誤差模型;其次,根據車載導航數據,進行了卡爾曼濾波仿真分析,評估
2009-12-14 14:58:426 介紹了某新型導彈參檢儀的自動檢定系統的設計思想,重點討論了系統硬件和軟件的實現方法,分析論述了系統誤差的處理和控制方法。系統設計思想先進、結構簡單、自動化程度
2009-09-14 15:02:2319 系統模型及其分類系統:具有特定功能的總體,可以看作信號的變換 器、處理器。系統模型:系統物理特性的數學抽象,一般也稱為數學模型。 電路的微分方程為:該微
2009-09-08 21:00:2510 為提高傳感器的準確度,減少傳感器的研制成本,提出了基于神經網絡多傳感器誤差補償的方法。該方法利用BP 網絡較強的非線性映射能力,網絡通過學習能實現對傳感器系統誤差的補
2009-07-13 10:31:028 誤差分析及處理技術
測量誤差的基本概念
1. 絕對誤差絕對誤差是示值(或稱測量值)與被測量真值之間
2009-05-19 08:41:00833 
在測量系統中,傳感器的非線性特性是測量系統誤差的主要來源。要提高測量系統的精度,就必須進行誤差補償。設計了一個用模糊小腦神經網絡實現的補償環節。該補償環節是一
2009-03-14 18:27:0111 為了提高工業生產過程中廠泛應用的光電積分測色儀的測試精度,分析、研究儀器誤差成為儀器設計的重要內容之一。在分析探測器的光譜三刺激非線性誤差的基礎上,進行了
2009-03-14 08:32:4014 誤差從性質上分類、特點 誤差從性質上可分為三大類,即:系統誤差 隨機(偶然)誤差 疏失誤差(粗大誤差、過失誤差)
2008-09-18 01:12:5710062 真有效值變換:負載網絡和取樣電阻上采集的是的交流電壓信號,如果直接送單片機A/D進行處理,會增大系統誤差。為把系統誤差控制在題目要求的范圍內,我們在每一個信號的輸
2008-04-03 13:14:2310399 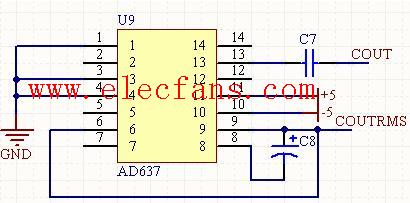
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論