 電子發(fā)燒友App
電子發(fā)燒友App


實(shí)驗(yàn)? 時(shí)分復(fù)用數(shù)字基帶通信系統(tǒng)
??? 一、實(shí)驗(yàn)?zāi)康?/font>
??? 1.掌握時(shí)分復(fù)用數(shù)字基帶通信系統(tǒng)的基本原理及數(shù)字信號(hào)傳輸過(guò)程。
??? 2.掌握位同步信號(hào)抖動(dòng)、幀同步信號(hào)錯(cuò)位對(duì)數(shù)字信號(hào)傳輸?shù)挠绊憽?br>3.掌握位同步信號(hào)、幀同步信號(hào)在數(shù)字分接中的作用。
二、實(shí)驗(yàn)內(nèi)容
??? 1.用數(shù)字信源模塊、數(shù)字終端模塊、位同步模塊及幀同步模塊連成一個(gè)理想信道時(shí)分復(fù)用數(shù)字基帶通信系統(tǒng),使系統(tǒng)正常工作。
??? 2.觀察位同步信號(hào)抖動(dòng)對(duì)數(shù)字信號(hào)傳輸?shù)挠绊憽?br>??? 3.觀察幀同步信號(hào)錯(cuò)位對(duì)數(shù)字信號(hào)傳輸?shù)挠绊憽?br>4.用示波器觀察分接后的數(shù)據(jù)信號(hào)、用于數(shù)據(jù)分接的幀同步信號(hào)、位同步信號(hào)。
三、基本原理
本實(shí)驗(yàn)要使用數(shù)字終端模塊。
??? 1. 數(shù)字終端模塊工作原理:
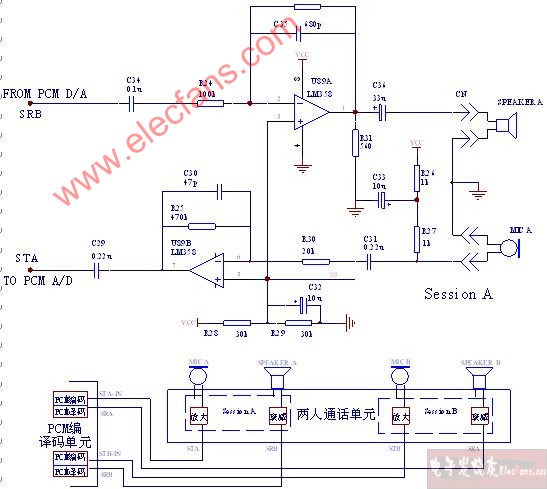
原理框圖如圖7-1所示,電原理圖如圖7-2所示(見(jiàn)附錄)。它輸入單極性非歸零信號(hào)、位同步信號(hào)和幀同步信號(hào),把兩路數(shù)據(jù)信號(hào)從時(shí)分復(fù)用信號(hào)中分離出來(lái),輸出兩路串行數(shù)據(jù)信號(hào)和兩個(gè)8位的并行數(shù)據(jù)信號(hào)。兩個(gè)并行信號(hào)驅(qū)動(dòng)16個(gè)發(fā)光二極管,左邊8個(gè)發(fā)光二極管顯示第一路數(shù)據(jù),右邊8個(gè)發(fā)光二極管顯示第二路數(shù)據(jù),二極管亮狀態(tài)表示“1”,熄滅狀態(tài)表示“0”。兩個(gè)串行數(shù)據(jù)信號(hào)碼速率為數(shù)字源輸出信號(hào)碼速率的1/3。
在數(shù)字終端模塊中,有以下測(cè)試點(diǎn)及輸入輸出點(diǎn):
? S-IN????時(shí)分復(fù)用基帶信號(hào)輸入點(diǎn)
? SD?????抽樣判后的時(shí)分復(fù)用信號(hào)測(cè)試點(diǎn)
? BD?????延遲后的位同步信號(hào)測(cè)試點(diǎn)
? FD?????整形后的幀同步信號(hào)測(cè)試點(diǎn)
? D1?????分接后的第一路數(shù)字信號(hào)測(cè)試點(diǎn)
? B1?????第一路位同步信號(hào)測(cè)試點(diǎn)
? F1?????第一路幀同步信號(hào)測(cè)試點(diǎn)
? D2?????分接后的第二路數(shù)字信號(hào)測(cè)試點(diǎn)
? B2?????第二路位同步信號(hào)測(cè)試點(diǎn)
? F2?????第二路幀同步信號(hào)測(cè)試點(diǎn)
圖7-1? 數(shù)字終端原理方框圖
圖7-1中各單元與電路板上元器件對(duì)的應(yīng)關(guān)系如下:
? 延遲1????U63:?jiǎn)畏€(wěn)態(tài)多諧振蕩器4528
??? ? 延遲2????U62:A:D觸發(fā)器4013
??? ? 整形????U64:A:?jiǎn)畏€(wěn)態(tài)多諧振蕩器4528;U62:B:D觸發(fā)器4013
? 延遲3????U67、U68、U69:移位寄存器40174
? ÷3????U72:內(nèi)藏譯碼器的二進(jìn)制寄存器4017
? 串/并變換???U65、U70:八級(jí)移位寄存器4094
??? ? 并/串變換????? U66、U71:八級(jí)移位寄存器4014(或4021)
? 顯示????? ??三極管9013;發(fā)光二極管
??? 延遲1、延遲2、延遲3、整形及÷3等5個(gè)單元可使串/并變換器和并/串變換器的輸入信號(hào)SD、位同步信號(hào)及幀同步信號(hào)滿足正確的相位關(guān)系,如圖7-3所示。
??? 移位寄存器40174把FD延遲7、8、15、16個(gè)碼元周期,得到FD-7、FD-15、FD-8(即F1)和FD-16(即F2)等4個(gè)幀同步信號(hào)。在FD-7及 的作用下,U65(4094)將第一路串行信號(hào)變成第一路8位并行信號(hào),在FD-15和 作用下,U70(4094)將第二路串行信號(hào)變成第二路8位并行信號(hào)。在F1及B1的作用下,U66(4014)將第一路并行信號(hào)變?yōu)榇行盘?hào)D1,在F2及B2的作用下,U71(4014)將第二路并行信號(hào)變?yōu)榇行盘?hào)D2。B1和B2的頻率為位同步信號(hào)BS頻率的1/3,D1信號(hào)、D2信號(hào)的碼速率為信源輸出信號(hào)碼速率的1/3。
U65、U70輸出的并行信號(hào)送給顯示單元。根據(jù)數(shù)字信源和數(shù)字終端對(duì)應(yīng)的發(fā)光二極管的亮熄狀態(tài),可以判斷數(shù)據(jù)傳輸是否正確。
串/并變換及并/串變換電路都有需要位同步信號(hào)和幀同步信號(hào),還要求幀同步信號(hào)的寬度為一個(gè)碼元周期且其上升沿應(yīng)與第一路數(shù)據(jù)的起始時(shí)刻對(duì)齊,因而送給移位寄存器U67的幀同步信號(hào)也必須符合上述要求。但幀同步模塊提供的幀同步信號(hào)脈沖寬度大于兩個(gè)碼元的寬度,且?guī)矫}沖的上升沿超前于數(shù)字信源輸出的基帶信號(hào)第一路數(shù)據(jù)的起始時(shí)刻約半個(gè)碼元(幀同步脈沖上升沿略遲后于位同步信號(hào)的上升沿,而位同步信號(hào)上升沿位于位同步器輸入信號(hào)的碼元中間,由幀同步器工作原理可得到上述結(jié)論),故不能直接將幀同步器提取的幀同步信號(hào)送到移位寄存器U67的輸入端。
終端模塊將幀同步器提取的幀同步信號(hào)送到單穩(wěn)U64的輸入端,單穩(wěn)U64設(shè)為上升沿觸發(fā)狀態(tài),其輸出脈沖寬度略小于一個(gè)碼元寬度,然后用位同步信號(hào)BD對(duì)單穩(wěn)輸出抽樣后得到FD,如圖7-3所示。
圖7-3? 變換后的信號(hào)波形
應(yīng)指出的是,當(dāng)數(shù)字終端采用其它電路或分接出來(lái)的數(shù)據(jù)有其它要求時(shí),對(duì)位同步信號(hào)及幀同步信號(hào)的要求將有所不同,但不管采用什么電路,都需要符合某種相位關(guān)系的幀同步信號(hào)和位同步信號(hào)才能正確分接出時(shí)分復(fù)用的各路信號(hào)。
2. 時(shí)分復(fù)用數(shù)字基帶通信系統(tǒng)
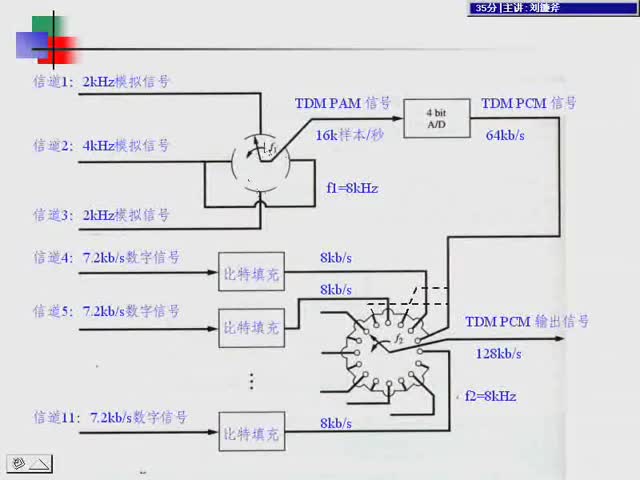
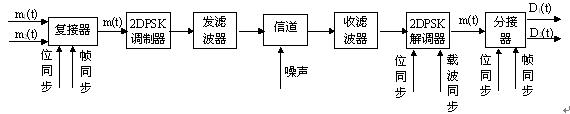
??? 圖7-5為時(shí)分復(fù)用數(shù)字基帶通信系統(tǒng)原理方框圖。復(fù)接器輸出時(shí)分復(fù)用單極性不歸零碼(NRZ碼),碼型變換器將NRZ碼變?yōu)檫m于信道傳輸?shù)膫鬏敶a(如HDB3碼等),發(fā)濾波器主要用來(lái)限制基帶信號(hào)頻帶,收濾器可以濾除一部分噪聲,同時(shí)與發(fā)濾波器、信道一起構(gòu)成無(wú)碼間串?dāng)_的基帶傳輸特性。復(fù)接器和分接器都需要位同步信號(hào)和幀同步信號(hào)。
圖7-5? 時(shí)分復(fù)用數(shù)字基帶通信系統(tǒng)
??? 本實(shí)驗(yàn)中復(fù)接路數(shù)N=2,信道是理想的、即相當(dāng)于將發(fā)濾波器輸出信號(hào)無(wú)失真地傳輸?shù)绞諡V波器。為簡(jiǎn)化實(shí)驗(yàn)設(shè)備,收、發(fā)濾波器也被省略掉。
本實(shí)驗(yàn)的主要目的是掌握位同步信號(hào)及幀同步信號(hào)在數(shù)字基帶傳輸中的作用,故也可省略碼型變換和反變換單元。
四、實(shí)驗(yàn)步驟
??? 本次實(shí)驗(yàn)使用數(shù)字信源、位同步、幀同步、數(shù)字終端這四個(gè)單元。它們的信號(hào)連接關(guān)系如圖7-6所示,其中實(shí)線表示實(shí)驗(yàn)板上已經(jīng)布好,虛線(共四根)表示實(shí)驗(yàn)中要手工連接的信號(hào)線。
??? 1.復(fù)習(xí)位同步、幀同步的實(shí)驗(yàn)內(nèi)容并熟悉數(shù)字終端單元工作原理,按照?qǐng)D7-6將這四個(gè)模塊連在一起,接通實(shí)驗(yàn)箱電源。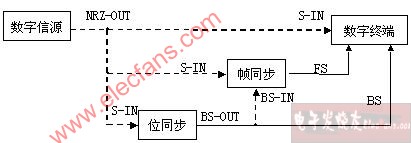
圖7-6? 數(shù)字基帶系統(tǒng)連接圖
??? 2.用示波器CH1觀察數(shù)字信源單元NRZ-OUT波形,判斷信源單元是否工作正常。
3.用示波器CH2觀察位同步單元BS-OUT,調(diào)節(jié)位同步單元的可變電容,使位同步信號(hào)BS-OUT對(duì)準(zhǔn)信源的NRZ信號(hào)中間位置并且相位抖動(dòng)最小。
??? 4.將數(shù)字信源單元的K1置于?1110010,用示波器CH2觀察幀同步單元FS信號(hào)與信源NRZ信號(hào)的相位關(guān)系,判斷幀同步單元是否工作正常。
??? 5.當(dāng)位同步單元、幀同步單元已正確地提取出位同步信號(hào)和幀同步信號(hào)時(shí),通過(guò)發(fā)光二極管觀察兩路8bit數(shù)據(jù)已正確地傳輸?shù)绞战K端。
??? 6.用示波器觀察分接出來(lái)的兩路8bit周期信號(hào)D1(對(duì)應(yīng)位同步B1)和D2(對(duì)應(yīng)B2)。
??? 7.觀察位同步抖動(dòng)對(duì)數(shù)據(jù)傳輸?shù)挠绊憽?br>用示波器觀察數(shù)字終端單元的D1或D2信號(hào),然后緩慢調(diào)節(jié)位同步單元上的可變電容C2(增大位同步抖動(dòng)范圍),觀察D1或D2信號(hào)波形變化情況和發(fā)光二極管的狀況(C2在某一范圍變化時(shí),D1或D2無(wú)誤碼,C2變化太大時(shí)出現(xiàn)誤碼)。
8.觀察幀同步對(duì)數(shù)據(jù)傳輸?shù)挠绊憽?br>還原位同步單元到正確的狀態(tài),將數(shù)字信源單元的K1置為1110 010X,觀察數(shù)字終端分接出來(lái)的兩路信號(hào)和數(shù)字信源單元的對(duì)應(yīng)關(guān)系,分析原因。
??? 五、實(shí)驗(yàn)報(bào)告要求
??? 1.本實(shí)驗(yàn)系統(tǒng)中,為什么位同步信號(hào)在一定范圍內(nèi)抖動(dòng)時(shí)并不發(fā)生誤碼?位同步信號(hào)的這個(gè)抖動(dòng)范圍大概為多少?在圖7-5所示的實(shí)際通信系統(tǒng)中是否也存在此現(xiàn)象?為什么。
2.幀同步信號(hào)在對(duì)復(fù)用數(shù)據(jù)進(jìn)行分接時(shí)起何作用,用實(shí)驗(yàn)結(jié)果加以說(shuō)明。
3.分析數(shù)字終端模塊中串/并變換和并/串變換電路的工作原理。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論