線性2自由度汽車模型是汽車操縱穩定性分析中最簡單、最典型的模型。
2023-06-28 16:52:31 541
541 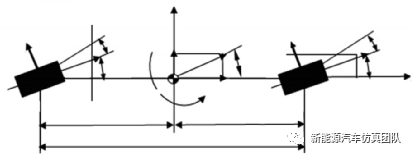
本期采用Simulink建立汽車2自由度動力學模型。為了便于掌握汽車穩定性的基本特性,對汽車簡化為線性二自由度的汽車模型,忽略轉向系統的影響,直接一前輪轉角作為輸入;忽略懸架的作用,認為汽車車廂只作用于地面的平面運動。
2023-06-28 16:39:13443 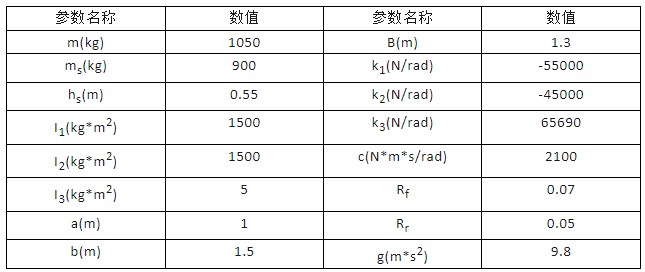
本文示例將實現4自由度并聯機器狗行走的功能。
2023-06-18 10:49:20316 
本文實例將實現2自由度并聯仿生腿模組運動起來,模擬實現狗腿行走的動作。
2023-06-18 10:35:20136 
人的手臂(腕關節到肩關節)有幾個自由度?我想絕大部分人都沒有想過,更別說去了解有哪幾個自由度,即使是學工科的人,也未必能解釋清楚。沒想到知乎上居然有人把這個問題回答的這么專業有內涵,同時又那么有哲理,忍不住想要把這個答案分享一下。
2023-06-07 15:48:16529 
隨著機器人變得日益成熟,它們已經能夠應用到處理越來越多的工業工序。6自由度(6Dof)機器人能夠執行復雜的動作,因而可以在許多復雜的工業任務當中展示良好的性能,比如碼垛、搬運、涂膠和焊接等。6自由度機器人可以提舉和靈活地操縱重型載荷,并通過復雜的幾何運動對載荷進行精確操控。
2023-05-18 17:34:21404 
基于三維模型的視覺定位通過在查詢圖像和三維模型間建立 2D-3D 對應關系,估計相機六自由度的位姿。傳統的視覺定位方法通常采用人工設計的局部特征,如 SIFT,來實現 2D-3D 匹配,并結合圖像檢索技術,將匹配范圍限制在查詢圖像的可見區域,以適應大規模場景的需求。
2023-04-20 10:07:05572 工業機器人自由度一般分為4個自由度,或者6個自由度,關節機器人主要是模仿人的手臂進行設計的。
2023-03-16 12:20:30892 1、功能描述 ? ? ?R308樣機是一款擁有3自由度的串聯機械臂。本文提供的示例所實現的功能為:在3自由度串聯機械臂樣機上安裝電磁鐵,實現電磁鐵搬運物品的功能。 2、電子硬件 在這個示例中,我們
2023-03-09 08:31:06376 
1. 運動功能說明 ? ? R204樣機是一款擁有4個自由度的串聯機械臂。本文示例實現4自由度串聯機械臂抓取物品、放下的功能。 2. 結構說明 ? ?R204號樣機由4個串聯的 舵機關節模組 和1個
2023-03-03 17:35:42351 
一個微型的三自由度機械臂,您甚至可以記錄運動并循環它!
2022-12-07 14:00:37 0
0 無線電編、譯碼發射和接收遙控器1.7智能小車的直流電機控制1.8計算機與智能小車的串口通信1.9智能小車的自動尋跡實驗1.10三自由度的機械爬蟲的運動原理1.11附錄ICCAVR簡介1.12附錄串口調試軟件
2011-03-09 12:37:40
ADIS16488:戰術級十自由度慣性傳感器數據表
2021-05-27 18:24:5611 ADIS16385:六自由度慣性傳感器報廢數據表
2021-05-24 09:14:261 ADIS16485:戰術級六自由度慣性傳感器數據表
2021-05-23 17:32:479 ADIS16367:六自由度慣性傳感器報廢數據表
2021-05-10 15:50:024 在自主研制的新型五自由度并聯機器人的基礎上, 設計完成了以微機、無刷直流電機、PCI 接口測控卡為基礎的控制系
2021-05-05 23:21:002420 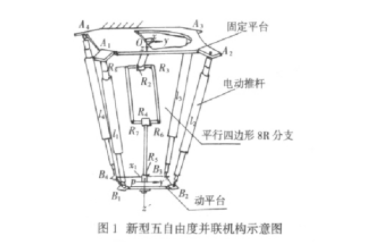
碼垛機器人是面向工業領域的多關節機械手或多自由度的機器裝置,它能自動執行工作,靠自身動力和控制能力來實現各種功能的一種機器。它可以接受人類指揮,也可以按照預先編排的程序運行。
2020-09-02 14:27:15923 由兩個發送端組成整個機械臂系統,發送端一圖5.7在PCB線路板上設計并焊接集成了STM32F103C8核心板,MPU6050姿態傳感器,nRF24L01無線收發器和一個控制機械臂爪子部分夾取功能的按鈕。
2020-08-27 17:35:428647 什么是六自由度壓電納米定位臺? 六自由度壓電納米定位臺可產生X、Y、Z三軸直線運動以及x、y、z 三軸偏轉/旋轉角度運動的壓電平臺。六自由度壓電定位臺應用舉例 -光纖對接調整 光纖裸纖一般分為三
2020-08-10 11:37:39845 三自由度飛機飛行姿態模擬實驗臺是集機械技術、控制技術和傳感器檢測技術、計算機技術于一體的綜合性測試設備。它作為一種空間運動機構是飛機進行動態性能測試的關鍵設備,主要用于模擬飛機的運動姿態,為飛機提供
2020-04-12 17:17:00715 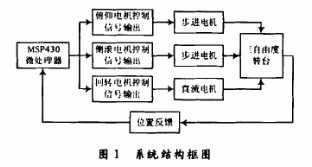
本文對一種新型的二自由度并聯機器人進行分析。機器人可以放置在一個固定方向的平面剛體。首先詳細介紹了機器人的運動結構,然后分析了一些運動的問題,如正向和逆向的運動學,速度,和奇異點。對工作和裝配
2020-03-26 16:27:297 六自由度運動平臺是典型的并聯運動機構,由六支作動筒,上、下各六只萬向鉸鏈和上、下兩個平臺組成,下平臺固定在基礎上,借助六支作動筒的伸縮運動,完成上平臺在空間六個自由度(X,Y,Z,α,β,γ)的運動,從而可以模擬出各種空間運動姿態。
2020-03-07 16:54:001070 小型廉價的6自由度機械臂,希望能圓大家一個玩機械手的夢! DFLG6DOF機械手由6個微型伺服電機(舵機)組成,分別對應于臂、肘、腕(2個自由度)、張合5個關節和1個旋轉底座,每個關節可在一定范圍內運動,底座可以實現左右90度旋轉。通過上位
2020-01-14 10:48:393941 
個玩機械手的夢! DFLG5DOF機械手由5個微型伺服電機(舵機)組成,分別對應于臂、肘、腕(2個自由度)、張合5個關節,每個關節可在一定范圍內運動。通過上位機控制軟件給舵機控制器發送控制指令,從而實現機械臂在空間中的精確作業。 在機
2020-01-14 10:43:262354 
,仿真功能強大,可以在模型中通過改變結構,優化系統參數,在仿真環境中分析結果。利用 SimMechanics 的上述優點,以工業六自由度機械臂 ER10 為研究對象,將 SolidWorks 建立好的機械臂 ER10 模型導入到 MATLAB/ SimMechanics 仿真平臺中,生成對應的仿真模型,
2019-11-12 08:00:001 我希望這些照片對您有所幫助組裝您的4自由度機械臂。
2019-10-09 11:52:039029 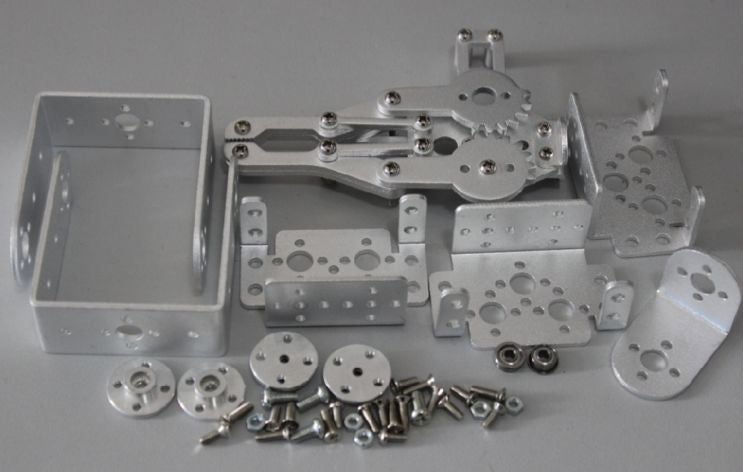
現在用的最多的工業機器人,一般都是六軸的,但是最近推出來的人機協作機械臂,卻有7個自由度,一直想不明白為什么。
2019-04-10 13:49:5310278 現在用的最多的工業機器人,一般都是六軸的,但是最近推出來的人機協作機械臂,卻有7個自由度,一直想不明白為什么。
2019-03-17 09:23:0225476 積累和放大、位置反解容易等優點, 與串聯機構在應用上形成了互補關系。目前, 對并聯機器人研究較多的是6 自由度( 6DOF) 并聯機器人, 但在某些場合2~5 個自由度即可滿足使用要求, 這類少于6 自由度
2018-10-07 10:57:005266 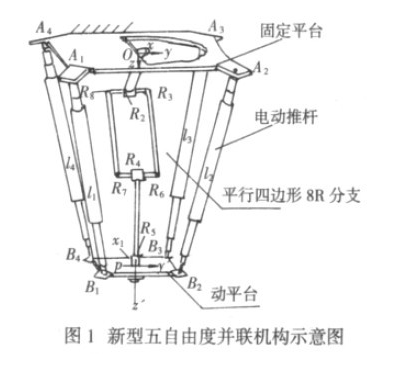
記者從中國科大獲悉,該校郭光燦院士團隊李傳鋒、周宗權等人成功研制出多自由度并行復用的固態量子存儲器,在國際上首次實現跨越3個自由度的復用量子存儲,并展示了時間和頻率自由度的任意光子脈沖操作功能。該成果近日發表在國際期刊《自然·通訊》上。
2018-08-30 14:08:071832 基于牛頓歐拉法,針對一種采用非對稱液壓缸構建的新型三自由度并聯機構進行了完整的動力學建模,為該機構結構優化打下基礎。運用非對稱閥控制非對稱缸負載匹配理論,給出了一定結構參數和運動性能要求下的負載軌跡、最佳負載匹配曲線以及相關液壓參數,為液壓元件的選型提供設計依據。
2018-03-26 11:15:211 針對工業中片狀材料自動化傳輸的應用需求和垂直方向占用空間小的要求,設計了一種成本低、工作空間大和占用空間小的自由度多關節機械手臂。該機械臂是一種3關節3連桿式機械結構,采用減速機和二級同步帶進行傳動
2018-03-20 14:52:515 VR動感椅運動平臺原型為三自由度并聯運動機構,由六自由度Stewart機構衍生而來。本研究設計的一種新型的具有防扭結構的三自由度并聯運動平臺,應用于虛擬現實技術中的動感椅結構中。基于VR技術的動感椅
2018-03-13 11:07:090 針對三自由度并聯氣動柔性執行器的工作空間計算問題,對其T作空間的計算方法和評價標準進行了研究。對該類利用柔性結構和壓縮空氣實現運動的新型執行器進行了運動學分析。通過對其3個氣動柔性元件以及兩個圓盤
2018-03-13 10:39:520 對接控制設備仿真試驗失重狀態模擬三自由度氣浮平臺是為某空間對接控制設備的全物理仿真模擬驗證試驗設計的。通過對平臺氣浮功能及運動功能的設計,確定了氣控系統工作原理及元件選型;在結構方面,注重運動的平穩
2018-03-01 10:25:190 的變化曲線,驗證了求解算法的正確性;運用Kutzbach-Grubler公式分析了電驅動UPU結構形式并聯運動平臺白由度的計算方法。根據給定參數建立了平臺的三維模型,進行了結構協調性檢測,并完成了步進電機驅動的六自由度平臺的實體結構研制。
2018-02-27 15:37:294 針對傳統機械臂負載白重比小、臂身慣量大、人機交互安全性弱等問題,對繩驅動機械臂的結構、繩驅關節耦合、冗余運動學等方面進行了研究,創新設計了一種新型7自由度冗余繩驅動機械臂。采用繩索間接驅動前端4個
2018-02-27 14:33:477 現在用的最多的工業機器人,一般都是六軸的,但是最近推出來的人機協作機械臂,卻有7個自由度,一直想不明白為什么。直到最近看到知乎上的一個問題:人的手臂(腕關節到肩關節)有幾個自由度?才發現,原來7個
2018-02-07 15:40:2517074 
機器人機構能夠獨立運動的關節數目,稱為機器人機構的運動自由度,簡稱自由度(Degree of Freedom),由DOF簡寫表示。
2018-01-17 10:03:2010842 為了解決三自由度Delta機器人工作空間的仿真問題,在總結已有的Delta機器人工作空間仿真方法的基礎上,基于Matlab和Catia提出了三種具有代表性的Delta機器人工作空間仿真方法,以實驗室
2018-01-05 16:13:291 對機器人進行相應的優化設計可以使機器人具有更好的結構性能與工作性能。以一種三自由度冗余驅動混聯機器人為研究對象,對該機器人尺寸參數無量綱化并分析該機器人可達的工作空間,進而在混聯機器人工作空間中找出
2018-01-05 14:24:191 針對傳統內模控制方法不能兼顧系統跟隨性、抗干擾性和魯棒性的問題,提出了一種基于三自由度內模控制的永磁同步電機矢量控制方法。該方法基于永磁同步電機矢量控制系統,分析了系統實現穩定性和魯棒性的條件,根據
2017-12-29 16:27:473 更合理的最優規劃依據,從而實現更安全可靠的規劃。同時將一個六自由度的規劃問題降維為一個三自由度規劃和一個四自由度規劃的問題,在此基礎上利用無需實時計算的先驗碰撞數據代替實時的碰撞檢測。利用該方法在ROS的rvl
2017-11-25 11:47:019 三維移動和兩維轉動的5 個自由度。 少自由度并聯機器人機構其動平臺的獨立輸出運動數小于6。近十多年來,該類機構成為研究的一個熱點。這是由于少自由度并聯機器人結構簡單、造價低,具有良好的應用前最。在許多場合,非期望
2017-10-23 16:24:5015 本論文以螺旋理論為基礎,提出一種系統的結構綜合方法。根據各條支鏈對運動平臺所提供的反螺旋約束的線性關系,研究了構成五自由度并聯機器人機構的各條支鏈所有可能的運動副組合以及它們的空間幾何條件。利用這一方法,設計出一組結構對稱的五自由度并聯機器人。
2017-10-17 14:51:586 什么是工業機器人的自由度? 通常作為機器人的技術指標,反映機器人動作的靈活性,可用軸的直線移動、擺動或旋轉動作的數目來表示。機器人機構能夠獨立運動的關節數目,稱為機器人機構的運動自由度,簡稱自由度
2017-09-26 16:06:253 六自由度液壓運動平臺的迭代學習控制_盧穎
2017-03-15 08:00:001 雙向中繼X信道的自由度研究_黨超
2017-03-04 18:07:530 六自由度機器人焊接軌跡研究_張用
2017-03-04 18:04:530 基于ARM的多自由度機械手設計_孫捷
2017-03-01 21:14:332 基于模糊PD算法的三自由度機械臂遙操作雙邊控制_邱恒
2017-01-21 12:16:517 基于二自由度模型驅動PID的CFB鍋爐床溫控制_吳丹丹
2017-01-13 21:36:190 永磁轉子偏轉式三自由度電機電磁系統的建模與分析_李爭
2017-01-08 12:03:280 多自由度超聲電機驅動電路研究_朱華
2017-01-08 11:20:203 19自由度機器人_動作例程,感興趣的小伙伴們可以瞧一瞧。
2016-11-17 18:35:231 工業機器人領域的典型設計,本文通過對多自由度的機器人運動控制進行典型的分析研究。
2016-05-25 14:03:399 大專生畢業設計任務書《基于PLC的五自由度噴漆機械手控制系統設計》。
2016-03-18 14:03:5810 為了使六自由度機械臂完成特定的動作, 需要設計計算相應的指令序列. 首先計算了機械臂位姿與指尖位置之間的關系公式, 然后針對機械臂的到達問題、沿曲線運動問題和避障問題, 分別
2012-02-17 16:55:04191 基于MSP430F149單片機設計了一種三自由度轉臺系統。在該系統中,利用旋轉編碼器的信息反饋,通過對電機的閉環控制,使三自由度轉臺能夠模擬飛機的飛行姿態。
2011-09-26 13:58:192181 
本文利用Intel 8254設計了一種簡單實用的數模轉換(D/A)電路,并應用于飛行模擬器三自由度運動平臺控制系統中。
2011-08-11 11:42:491143 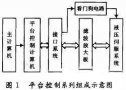
SimTec仿真技術公司總部位于德國北部Braunschweig,是一家擁有超過20年歷史的國際領先的運動仿真系統制造公司。 SimTec專門電液伺服液多自由度運動模擬系統及運動數據采集系統的的軟硬
2011-04-07 16:34:4222 六自由度電磁跟蹤系統根據電磁感應的原理來計算出目標的六個自由度參數,從而唯一確定目標的位置和姿態。怎樣由接收到的模擬信號計算得到目標的位置和姿態參數是影響整個系統性能的關鍵所在。在一些早期的產品中對感應天線接收信號的處理主要采用模擬電路和單
2011-01-25 00:11:021041 
本文介紹了由計算機對步進電機控制從而實現多自由度運動的系統的設計。同時詳細介紹了系統中的結構組成、軟件的應用和步進電機的控制。該控制系統操作界面友好、簡單,動
2010-07-21 09:54:0512 三自由度直升機的嵌入式控制系統
三自由度直升機可以應用于飛行器控制系統的半實物仿真試驗和性能測試等場合,用以模擬橫列式直升機,即傾轉旋翼機的直升機狀
2010-02-06 09:10:131179 
針對目前手動調整衛星姿態運動仿真設備氣浮臺時,調節時間過長而且平臺浮起部分擺動周期過短的問題,提出了三自由度氣浮臺自動平衡技術。本文重點推導了三自由度氣浮臺
2010-01-18 13:52:1719 針對二自由度PID 控制器參數整定困難的問題,提出了一種基于單親遺傳算法的二自由度參數整定方法。運用該算法分別對單自由度PID 控制器和二自由度控制器進行了整定,并與
2009-12-26 13:56:4223 新型三自由度碟型磁浮馬達特性量測與改善本計劃將針對本校電機系所研制之新型三自由度碟型磁浮馬達進行特性量測與改善。此碟型磁浮馬達是由具有18 個E型硅鋼片之三相交流
2009-11-17 18:13:3238 針對七自由度機械臂遠程控制的需要,構建了基于TCP/IP 網絡的控制系統。首先通過設計單片機系統實現本地端控制,然后運用WinSockets 類創建基于TCP/IP 的遠程控制程序,使連接在Inte
2009-08-15 16:01:4322 分析了欠驅動兩自由度機械臂主、被動關節間的動力學耦合特性,指出了被動關節處于不同位置時耦合特性的差異。針對主、被動關節間的動力學耦合特性及其差異,提出了兩種
2009-08-04 15:51:3327 三自由度氣動機械手的PLC控制
一、實驗目的:通過對一個三自由度氣動機械手的控制程序的設計,熟悉基于PLC的
2008-09-23 08:19:422987
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論