 電子發燒友App
電子發燒友App


實驗四、機構傳動系統設計、拼裝及運動分析實驗
一、實驗目的
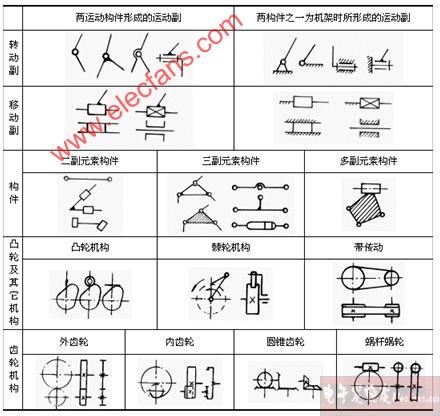
1.認識典型機構
2.設計實現滿足不同運動要求的傳動機構系統
3.拼裝機構系統
4.對運動構件進行運動檢測分析(位移、速度、加速度分析)
二、實驗原理
機械傳動系統的設計是機械設計中極其重要的一個環節,其中了解常用傳動機構,合理設計傳動系統是一個認識和創新的過程。為了實現執行機構工作的需求(運動、動力),我們必須利用不同機構的組合系統來完成。因此對于常用機構,如連桿機構,齒輪傳動機構,間歇運動機構,帶、鏈傳動機構的結構及運動特點應有充分的了解,在此基礎上,我們可以利用它們所在組合成我們需要的傳動系統。
執行機構常見的運動形式有回轉運動、直線運動和曲線運動,傳動系統方案的設計將以此為目標。
執行機構的運動不僅僅有運動形式的要求,而且有運動學和動力學的要求。因此我們必須對設計好的傳動系統中的重要運動構件進行運動學和動力學分析(速度、加速度分析),使執行構件滿足運動要求(如工作行程與回程的速度要求,慣性力要求,工作行程要求等)。任何傳動機構系統都有其特點,適應于不同的工作要求和安裝位置,我們應該學會在設計和拼裝中進行系統分析和評估。
該實驗臺可拼裝齒輪----桿組合機構、凸輪組合機構、不完全輪組合機構、槽輪組合機構,齒輪----齒條組合機構、鏈----齒輪組合機構及棘輪組合機構等。
三、實驗臺機械結構
該實驗臺主要由底座(安裝平臺)、平面連桿機構、凸輪機構、間歇機構(槽輪機構、不完全齒輪機構、棘輪機構等)、齒輪傳動機構、帶(鏈)傳動等機構組成,以及動驅動組成。
※?特別注意:在擰緊螺釘的過程中應均勻旋緊切忌單邊擰緊,否則會損壞傳感器。
1.底座(安裝平臺)的組成:
圖1安裝平臺的組成?
1、走條? 2、左垂直支撐? 3、橫梁組件? 4、內六角圓柱頭螺釘M8X35?? 5、右垂直支撐
?6、支承角鋼? 7、直流電機? 8、電機帶輪? 9、走條螺母? 10、底板
左、右垂直支撐(2、5)有四條垂直于底板(10)且相互平行的直槽用于固定橫梁組件(3)。橫梁組件(3)可在水平、垂直方向根據安裝需要有級調整。走條(1)可在X、Y方向調整安裝位置。在直流電機(7)裝有電機帶輪(8)并用螺栓通過走條螺母(9)固定在走條(1),可沿走條(1)上的直槽方向調整。
橫梁組件由橫梁(1)、支承套(2)以及六角頭螺栓M6X40(3)等組成。橫梁(1)兩端各有1個M8的螺孔用于與左、右垂直支撐固定用, 橫梁(1)中有一橫槽用于安裝構件的橫梁固定套或基座等。左端的方槽用于安裝滑塊。兩端的圓孔用于橫梁固定套通過用。
?圖2 橫梁組件
1、?橫梁? 2、支承套? 3、六角頭螺栓M6X40
2.回轉付的結構:
圖5回轉付Ⅲ???????????????? 圖6 回轉付Ⅳ
1、?曲柄? 2、導桿銷軸? 3、導桿銷套??? 1、大平墊8? 2、滑塊軸? 3、線位移連接塊
4、大平墊8? 5. 嵌件鎖緊螺母M8????????? 4、嵌件鎖緊螺母M8? 5、滑塊
回轉付Ⅰ(圖3):由桿Ⅰ、Ⅱ的套與回轉銷軸(3)組成,兩個嵌件鎖緊螺母M8(5)
用于控制軸向間隙。用于連桿與導桿、連桿與搖桿之間的連接。
回轉付Ⅱ(圖4):主要由橫梁固定套(4)的內套與回轉軸(1)構成。橫梁固定套(4)
上的槽可在圖二所示的橫梁組件的槽中根據需要移動并可用小圓螺母M24×1.5(5)固定。回轉軸(1)的左端可通過連接套與光柵角位移相連另一端通過鍵(6)與回轉件相
連。嵌件鎖緊螺母M8(2) 用于控制軸向間隙。用于回轉件的運動與安裝。
回轉付Ⅲ(圖5):主要由導桿銷套(3)、固定在曲柄(1)的導桿銷軸(2)等組成。
用于導桿的連接,導桿銷套(3)既可在導桿銷軸(2)轉動又可在導桿槽內滑動。嵌件鎖緊螺母M8(5) 用于調整導桿銷套(3)在導桿銷軸(2)上的軸向間隙。
回轉付Ⅳ(圖六):主要由鉸接在滑塊(5)孔內的滑塊軸(2)(詳見圖二十二b)、嵌
件鎖緊螺母M8(4)等組成。滑塊(5)可在圖二所示的橫梁組件的槽內滑動。嵌件鎖緊螺母M8(4) 用于調整滑塊(5)在滑塊軸(2)上的軸向間隙。線位移連接塊(3)用于連接直線位移傳感器。
3.傳感器的安裝方法:
(1)光柵角位移傳感器的安裝方法:(見圖7) 用于測量回轉件或者擺動件的角位移。
將光柵角位移傳感器(1)的止口套在角位移傳感器座(3)上并用十字槽盤頭螺釘
M3X12固定。根據被檢測件的位置調整圖二所示的橫梁組件的相對位置,通過連接塊
(4)用六角頭螺栓M8X30固定在橫梁組件上。彈性連接套(5)分別為L=53、60、73三
種規格,根據傳感器與被檢測件間的軸向距離選定后用螺絲刀將卡箍(6)擰緊。
圖7光柵角位移傳感器的安裝
1、光柵角位移傳感器? 2、六角頭螺栓M8X30? 3、角位移傳感器座? 4、連接塊
5、彈性連接套? 6、卡箍
(2)直線位移傳感器的安裝方法:(見圖8)
將固定塊(5)、連接座(3)用內六角圓柱頭螺釘M4X25固定在橫梁部件上。在允許
的范圍內L盡可能的大以增加傳感器的穩定性。將直線位移傳感器(1)放入連接座(3)的凹弧內并將連接塊(2) 內六角圓柱頭螺釘M4X30(4)擰緊。

圖8 直線位移傳感器的安裝
1、直線位移傳感器? 2、連接塊? 3、連接座? 4、內六角圓柱頭螺釘M4X30
5、固定塊?? 6、內六角圓柱頭螺釘M4X25
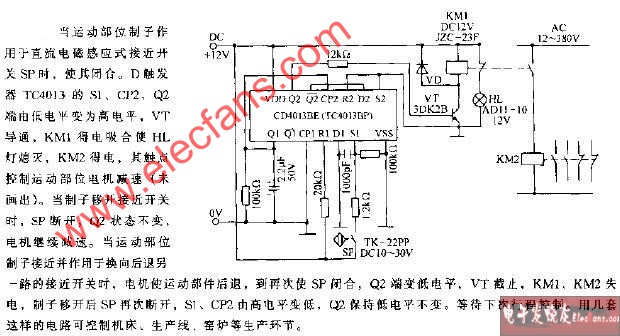
本實驗臺電機轉速控制系統有兩種方式:
①手動控制:通過調節控制箱上的兩個調速按鈕調節電機轉速。
②軟件控制:在實驗軟件中根據實驗需要來調節。
4.軟件說明
軟件操作說明如下:點擊可執行文件就會進入主界面。
主界面包括8個主菜單: 打開 、運動仿真、原理說明、僅數字信號、僅模擬信號、數字和模擬信號、關于、退出。
點擊“退出”可以終止程序的運行,點擊“關于”可以了解有關軟件版本的相關信息。點擊“原理說明”可以了解實驗原理。點擊“打開”可以打開以前所保存的文件。點擊“運動仿真”進入仿真窗體:
?
?
?
?
?
參數檢測主要包括:數字和模擬信號的檢測。如果想同時檢測二者的信號,選擇“數字和模擬信號”,如果只想檢測其中一個參數,選擇“僅模擬信號”或“僅數字信號”。選擇后單擊進入相應的實測窗體:
?
?
?
?
1、實測窗體有“文件(F)”、“實驗項目(P)”、“調速(D)”、“操作(O)”、“工具(T)”和“幫助(H)”菜單。
???? (1)“文件(F)”下有“新建、打開、保存、打印、退出”五個子菜單,它們分別有“新建一個文件、打開一個已保存文件和退出此測試界面的功能。
(2)“實驗項目(P)”有“數字信號”、“模擬信號”、
“數字和模擬信號”菜單,分別具有單一測試數字信號、模擬信號以及同時測試數字和模擬信號的功能。
(3)“調速(D)”有“加速”、“減速”、“停機”菜單,分別具有讓電機加速、減速、
停止的功能。
(4)“操作(O)”下有“采集”和“停止采集”菜單,分別有采集信號和停止采集信
號的功能。
(5)“工具(T)”下有“選項”子菜單,點擊出現選項卡,可以通過選擇“縱坐標縮
放”、“角位移”、“直線位移”、“角位移采樣方向”對實測窗體進行相關的設置。
還可以選擇“幫助”菜單來獲得相關的幫助信息
2、在菜單欄的下面有工具欄,工具欄上有很多的快捷圖標,只要把鼠標停留在快捷圖標上,系統會自動提示它相應的功能。通過快捷圖標同樣可以完成菜單欄里的全部功能。
四、實驗步驟
1.認識實驗臺提供的各種傳動機構的結構及傳動特點
2.確定執行構件的運動方式(回轉運動、間隙運動等)
3.設計或選擇所要拼裝的機構
4.看懂該機構的裝配圖和零部件結構圖
5.找出有關零部件,并按照裝配圖進行安裝
6.機構運動正常后,用手撥動機構,檢查機構運動是否正常
7.機構運動正常后,可將傳感器安裝在被測構件上,并連接在數據采集箱接線端口上
8.打開采集箱電源,按“加速”鍵,逐步增加電機轉速,觀察機構運動
9.打開計算機,并進入“檢測”界面,觀察相應構件的運動情況,如果有仿真界面內提供的機構,則可按實際機構的幾何參數,對執行構件的運動進行仿真
10.實驗完畢后,關閉電源,拆下構件
五、實驗報告
1.對系統進行評價和分析
2.對執行構件的運動規律進行分析(有無急回特性,有無沖擊,最大行程等)
思考題:
1.系統由幾部分組成?
2.該系統安裝精度如何,可如何改善?精度誤差造成的運動失真的分析。
3.執行構件的運動特點如何?
4.系統可應用在哪些機械系統中,有何優缺點?
機械結構及拼裝方式
該實驗臺可拼裝齒輪----桿組合機構、凸輪組合機構、不完全輪組合機構、槽輪組合機構,齒輪----齒條組合機構、鏈----齒輪機組合構及棘輪組合機構等。
該實驗臺采用臺架式結構,機構拼裝可在橫桿上裝配,不同的機構采用部件式的裝配方式,各零部件之間的安裝位置可調。系統由一可調速直流機驅動,傳動距離可調。安裝位置可根據需要調整。
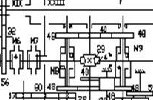
1.齒輪傳動----四桿組合機構(圖號為PCZ1.0--1),
其傳動路線為:
電機????? 帶傳動????? 齒輪傳動????? 四桿機構(大齒輪為曲柄)運動輸出構件為搖桿。
可檢測搖桿及曲柄的運動變化曲線。
2.齒輪傳動----曲柄滑塊組合機構(圖號為PCZ1.0--2)
其傳動路線為:
電機????? 帶傳動????? 齒輪傳動????? 曲柄滑塊機構(大齒輪為曲柄),運動輸出構件為滑塊。
可檢測曲柄及滑塊的運動變化曲線。
3.齒輪傳動----曲柄(導桿)搖桿組合機構(圖號為PCZ1.0--3)
其傳動路線為:
電機????? 帶傳動????? 齒輪傳動?????? 六桿機構(大齒輪為曲柄)運動輸出構件為搖桿。
可檢測曲柄及搖桿的運動變化曲線。
4.齒輪傳動----曲柄(導桿)滑塊組合機構(圖號為PCZ1.0--4),
其傳動路線為:
電機????? 帶傳動????? 齒輪傳動?????? 六桿機構(大齒輪為曲柄)運動輸出構件為搖桿。
可檢測曲柄及搖桿的運動變化曲線。
5.槽輪機構(圖號為PCZ2.0)
其傳動路線為:
電機??? 帶傳動??? 撥桿???? 槽輪,運動輸出構件為槽輪。
可檢測撥桿及槽輪的運動變化曲線。
6.凸輪機構(圖號為PCZ3.0),
其傳動路線為:
電機????? 帶傳動????? 凸輪????? 推桿,運動輸出構件為推桿。
可檢測凸輪及推桿的運動變化曲線。
7.輪傳動機構(圖號為PCZ7.0),
其傳動路線為:
電機????? 帶傳動????? 齒輪傳動????? 撥桿?????? 棘輪,運動輸出構件為棘輪。
可檢測棘的運動變化曲線。
8.齒輪---齒條機構(圖號為PCZ8.0),
其傳動路線為:
電機????? 帶傳動????? 撥桿????? 大齒輪????? 齒條,運動輸出構件為齒條。
可檢測齒條運動變化曲線。
9. 鏈傳動---齒輪傳動機構(圖號為PCZ9.0)
其傳動路線為:
電機????? 帶傳動????? 小齒輪????? 中齒輪????? 大齒輪,運動輸出構件為大齒輪。
可檢測小齒輪及大齒輪的運動變化曲線。
10.不完全齒輪機構(圖號為PCZ6.0)
其傳動路線為:
電機????? 帶傳動????? 不完全齒輪????? 完全齒輪,運動輸出構件為完全齒輪。











 工商網監
工商網監
評論