 電子發(fā)燒友App
電子發(fā)燒友App


隨著差錯控制編碼理論的完善和數(shù)字電路技術(shù)的發(fā)展,信道編碼已經(jīng)成功地應(yīng)用于各種通信系統(tǒng)中。其基本做法是:在發(fā)送端將被傳輸?shù)?a target="_blank">信息序更上附加一些監(jiān)督碼元,這些多余的碼元與信息序列之間以某種確定的規(guī)則相互約束;接收端按照既定的規(guī)則檢驗(yàn)信息碼元與監(jiān)督碼元之間的關(guān)系,一旦傳輸過程中發(fā)生錯誤,則信息碼元與監(jiān)督碼元之間的關(guān)系將受到破壞,從而發(fā)現(xiàn)錯誤,甚至糾正錯誤。按照信息碼元和監(jiān)督碼元之間的約速方式,可以分為組碼和卷積碼。在GSM和IS-95中主要采用了卷積碼,在每三代移動通信中,話音信號也主要采了卷積編碼。卷積碼的譯碼方法有許多種,其中最重要的就是Vertibi算法。為此,本文討論用DSP實(shí)現(xiàn)Vertibi譯碼器的方法。

1 卷積編碼器簡介
卷積碼是一種對付突發(fā)錯誤的有效編碼方法,通常記作(n,k,N)。它將k個信息編碼為n個比特,編碼效率為Rc=k/n。N為約束長度。與分組碼不同,卷積碼中編碼后的n個碼元不但與當(dāng)前段的k個信息有關(guān),而且與前面N-1段的信息有關(guān),編碼過程中相互關(guān)聯(lián)的碼元為Nn個。其糾錯能力隨著N的增加而增大,而差錯率隨著N的增加而指數(shù)下降。卷積編碼器的結(jié)構(gòu)如圖1所示。
由圖1可知,卷積編碼器包括兩部分:一個由N段組成的輸入移位寄存器,每段有k段,共有N·k位移位寄存器;n個模2和相加,其輸入分別對應(yīng)于n個基于生成多項(xiàng)式的線性代數(shù)方程組。每輸入k個比特,編碼器輸出n個比特。在編碼器復(fù)雜度相同的情況下,卷積碼的性能優(yōu)于分組碼。
2 Vertibi譯碼的基本原理
卷積碼的譯碼方法主要包括Vertibi算法、Fano算法和堆棧算法等等,其中最重要的和最常用的就是Vertibi算法。Vertibi算法是一種關(guān)于解卷積的最大似然譯碼法。它不是在網(wǎng)格上依次比較所有的可能路徑,而是接收一段,計(jì)算一段,保留最有可能的路徑,從而達(dá)到整個碼序列是一個最大似然序列。

Vertibi算法可以算法描述如下:把在時刻i、狀態(tài)Sj所對應(yīng)的網(wǎng)格圖節(jié)點(diǎn)記作(Sj,i),給每個網(wǎng)格圖節(jié)點(diǎn)賦值V(Sj,i)。節(jié)點(diǎn)值按照如下步驟計(jì)算:
①設(shè)V(S0,0)=0,i=1。
②在時刻i,對于進(jìn)入每個節(jié)點(diǎn)的所有路徑計(jì)算其不完全路徑的長度。
③令V(Sj,i)為在i時刻,到達(dá)與狀態(tài)Sj相對應(yīng)的節(jié)點(diǎn)(Sj,i)的最小不完全路徑長度,通過在前一節(jié)點(diǎn)隨機(jī)選擇一條路徑就可產(chǎn)生新的結(jié)果,非存留支路將從網(wǎng)格圖中刪除。以這種方式,可以從(S0,0)處產(chǎn)生一組最小路徑。
④用L表示輸入編碼段的數(shù)目。其中,每段為k比特,m為編碼器中最大寄存器的長度。如果i
一旦計(jì)算出所有節(jié)點(diǎn)值,則從i=L+m時刻,狀態(tài)S0開始,沿網(wǎng)格圖中的幸存路徑反向追尋即可。這樣被定義支路與解碼輸出將是一一對應(yīng)的。關(guān)于不完全路徑長度,硬判斷決解碼采用漢明距離,軟判決解碼采用的是歐幾里德距離。軟判決的特性比硬判決要好2~3dB。
(n,k,N)卷積編碼器共有2 kn個狀態(tài),因此Vertibi譯碼器必須具有同樣的2 kn個狀態(tài),并且在譯碼過程中要存儲各狀態(tài)的幸存路徑和長度。Vertibi譯碼器的復(fù)雜程度隨2 kn指數(shù)增加。一般要求n<10。
3 Vertibi譯碼器的DSP實(shí)現(xiàn)
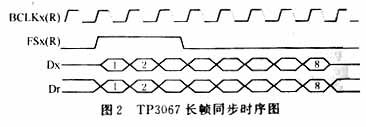
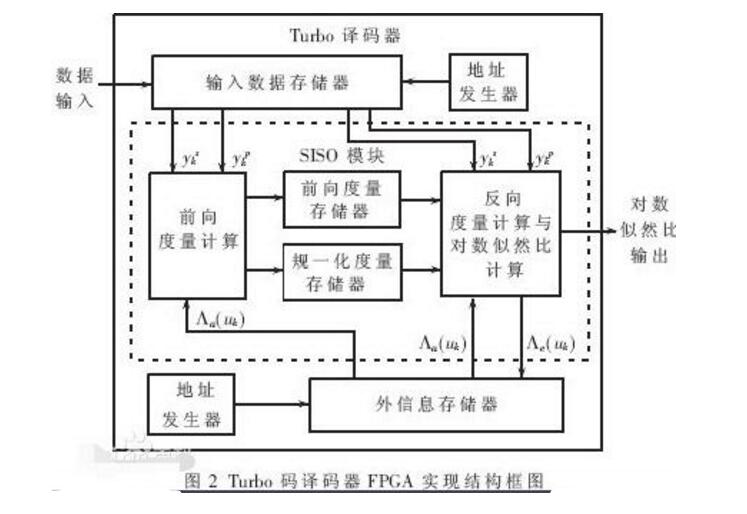
譯碼過程就是根據(jù)接收到的數(shù)據(jù)符號,按最大似然譯碼準(zhǔn)則找出編碼器在網(wǎng)絡(luò)圖上所走過的路徑。Vertibi譯碼的處理過程如圖2所示。
3.1 度量值更新
度量值的更新包括以下4個步驟:
①計(jì)算每條可能輸入路徑的度量值;
②為每條支路計(jì)算總的距離;
③選擇保存最小度量值;
④保存幸存路徑。
Vertibi譯碼時,每收到一個符號就進(jìn)行狀態(tài)轉(zhuǎn)移,需要計(jì)算前一個狀態(tài)到各個新狀態(tài)的分支度量值。我們用DSP設(shè)計(jì)的譯碼器采用軟判決輸入,度量值用歐氏距離表示。當(dāng)編碼速率為1/C時,歐氏距離為:

其中SDn表示接收序列,Gn(j)為網(wǎng)格上每個路徑狀態(tài)的期望輸入值,j是路徑指示值,C為編碼速率的倒數(shù)。將(1)式展開得:

對于所有的路徑來說, 都是一樣的,2只是個常數(shù),在進(jìn)行各路徑度量值比較時,可以不考慮。這樣可簡化為:
都是一樣的,2只是個常數(shù),在進(jìn)行各路徑度量值比較時,可以不考慮。這樣可簡化為:
省去膠面的負(fù)號,在度量值的比較時取最大值。對于編碼速率為1/2的卷積碼,分支度量為:
T=SD0G0(j)+SD1G1(j) (4)
當(dāng)編碼速率為1/3時,分支度量為:
T=SD0G0(j)+SD1G1(j)+SD2G2(j) (5)
Gn(j)用雙極性表示,即0用+1表示,1用-1表示。這樣分支度量值的計(jì)算可以進(jìn)一步簡化為接收數(shù)據(jù)的加和減。
下面給出編碼速率為1/3時,DSP實(shí)現(xiàn)具體程序。
LD *AR1+,16,A ;A=SD(2*i)
ADD*AR1+,16,B,B ;B=SD(2*i)+SD(2*i+1)
ADD*AR1-,16,B,B ;B=SD(2*i)+SD(2*i+)+SD(2*i+2)
STH B,*AR2+ ;temp(0)=SD(2*i)+SD(2*i+2)
SUB*AR1+,16,A,B ;B=SD(2*i)-SD(2*i+)
ADD *AR1-,16,B,B ;B=SD(2*i)-SD(2*i+1)+SD(2*i+2)
STHB,*AR2+ ;temp(1)=SD(2*i)-SD(2*i+1)+SD(2*i+2)
SUB *AR1+,16,A,B ;B=SD(2*i)-SD(2*i+1)
SUB *AR1-,16,B,B ;B=SD(2*i)-SD(2*i+1)-SD(2*i+)
STH B,*AR2+ ;temp(2)=SD(2*i)-SD(2*i+1)-SD(2*i+2)
ADD *AR1+,16,A,B ;B=SD(2*i)+SD(2*i+1)
SUB *AR1+,16,B,B ;B=SD(2*i)+SD(2*i+1)-SD(2*i+2)
STH B,*AR2 ;temp(3)=SD(2*i)+SD(2*i+1)-SD(2*i+2)
加比選單元是Vertibi譯碼器的核心單元。它的主要功能是取出當(dāng)前狀態(tài)的量度值,分別與其兩個后續(xù)支路的量度相加并比較,選擇羅小的一個作為后續(xù)狀態(tài)的量度,并保存幸存支路。圖3給出了該算法的示意圖。
C54X片內(nèi)的比較、選擇和存儲單元(CSSU)就是專門為Viterbi算法設(shè)計(jì)的加法/比較/選擇(ACS)運(yùn)算的硬件單元。圖3所示的運(yùn)算包括加法、比較和選擇三部分操作。其加法運(yùn)算由DSP的ALU完成。只要將狀態(tài)寄存器ST1中的C16位置成1,ALU就被配置成雙16位工作方式,這樣,就可以在一個機(jī)器周期內(nèi)執(zhí)行兩次加法運(yùn)算。其結(jié)果(Old_Met1+D1和Old_Met2+D2)都是16位數(shù),分別存放在累加器的高16位和低16位中。然后,利用CMPS指令對累加器的高16位和低16位進(jìn)行比較,并選擇出較大的一個數(shù)放到指令所指定的存儲單元中。在CMPS指令執(zhí)行的過程中,狀態(tài)轉(zhuǎn)移寄存器TRN自動記錄比較的結(jié)果,這一點(diǎn)非常有用。實(shí)現(xiàn)一個蝶式運(yùn)算的程序如下:
LD *AR2,T ;T=本地距離
DADST *AR5,A ;A=Old_Met(2*j)+T//Old_Met(2*j+1)-T
CMPS A,*AR4+ ;New_Met(j)=(Max(Old_Met(2*j)+T,Old_Met(2*j+1)-T)
;TRN=RTN<<1
;若(Old_Met(2*j)+T=
TRN[0]=1
CMPS B,*AR3+ ;New_Met(j+2 K-2)=(Max(Old_Met(2*j)-T,Old_Met(2*j+1)+T)
TRN=TRN<<1
;若(Old_Met(2*j)-T=
3.2 回溯
當(dāng)接收完1幀數(shù)據(jù)后,添加尾比特,強(qiáng)迫網(wǎng)格圖的最后一個狀態(tài)(0狀態(tài))開始,反向追蹤最大似然路徑,完成原始數(shù)據(jù)的譯碼。回溯的計(jì)算過程如下:
①計(jì)算當(dāng)前狀態(tài)在轉(zhuǎn)移數(shù)據(jù)塊中的數(shù)據(jù);
②利用BITT指令從T寄存器中讀取當(dāng)前狀態(tài)相應(yīng)的轉(zhuǎn)稱比特;
③用上面讀取的轉(zhuǎn)移比特更新狀態(tài)。
溯的主要功能是,從每個符號間隔的轉(zhuǎn)移數(shù)據(jù)中提取正確的位。為了完成該功能,需要保存每個狀態(tài)相應(yīng)的轉(zhuǎn)移比特。該比特表示選定碟形網(wǎng)絡(luò)的是上面分支還是下面分支,所有這些轉(zhuǎn)移比特構(gòu)成一塊轉(zhuǎn)移字。表1給出轉(zhuǎn)移字塊中狀態(tài)數(shù)與相應(yīng)轉(zhuǎn)移比特之間的關(guān)系。
實(shí)現(xiàn)回溯的程序如下:
;以下程序中,累加器A存放狀態(tài)值,累加器B存放臨時的數(shù)據(jù)
;K為約束長度,MASK=2 K-5-1,ONE=1
RSBX OVM ;關(guān)閉溢出模式
STM *NTRAN_END,AR2;轉(zhuǎn)移表的結(jié)束地址
STM#NBWORDS-1,AR1;要計(jì)算的輸出字的序號
MVMM AR1,AR4 ;復(fù)制AR1的數(shù)值到AR4中
STM #OUTPUT+NBWORDS-1,AR3
;輸出比特的地址指針
LD #0,A 初始0狀態(tài)存入累加器A中
STM#15,BRC ;do i=0,NBWORDS-1
BACK:RPTB TBEND-1 ;do j=0,15
;在轉(zhuǎn)移字中計(jì)算比特位置
SFTL A,-(K-2),B ;B=A>>(K-2)
AND ONE,B ;B=B&1=msb of State
ADD A,1,B ;B=B+A<<1=2*State+msb of State
STLM B,T ;T=B(bit position)
;修正轉(zhuǎn)移字
SFTL A,-3,B ;B=A/8=State/8
AND MASK,B ;B=B&MASK=(K-5)lsb'sof State/8
STLM AR0 ;AR0=轉(zhuǎn)稱字索引
MAR *+AR2(-2K-5) ;修正寄存器值使其復(fù)位
MAR *AR2+0 ;加偏移量修正轉(zhuǎn)移字
BITT*AR2-0 ;測試轉(zhuǎn)移字中的比特位
ROLTC A
TBEND:STL A,*AR3-
BANZD:BACK,*AR1-
STM #15,BRC ;指向輸出緩沖區(qū)的首地址
LD*AR3,A ;將第一個字裝入累加器A中
RVS:SFTA A,-1,A
STM #15,BRC
RPTB RVS2-1
ROL B
SFTA A,-1,A
RVS2:BANZD RVS,*AR4- ;判斷所有的字是否都計(jì)算完
STL B,*AR3+ ;保存剛計(jì)算完的字
LD *AR3,A ;裝入下一個字
表1 一個符號間隔內(nèi)數(shù)據(jù)轉(zhuǎn)移的狀態(tài)順序
狀態(tài)字中的比特序號
15
14
13
12
…
2
1
0
轉(zhuǎn)移字序號
0
0
2K-2
1
2K-2 +1
…
2K-2 +6
7
2K-2 +7
1
8
2K-2 +8
9
2K-2 +9
…
2K-2+E
F
2K-2 +F
2
10
2K-2+10
11
2K-2 +11
…
2K-2 +16
17
2K-2 +17
…
…
…
…
…
…
…
…
…
2K-5 -1
2K-2 -8
2K-1 -8
2K-2 -7
2K-2 -7
…
2K-1 -2
2K-2 -1
2K-1 -1









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論