 電子發燒友App
電子發燒友App


1. LiteOS的互斥鎖
1.1. 互斥鎖
在多任務環境下,往往存在多個任務競爭同一共享資源的應用場景,互斥鎖可被用于對共享資源的保護從而實現獨占式訪問。互斥鎖(mutex)又稱互斥型信號量,是一種特殊的二值信號量,用于實現對共享資源的獨占式處理。另外,Huawei LiteOS提供的互斥鎖通過優先級繼承算法,解決了優先級翻轉問題。
1.2. 互斥鎖的使用方式
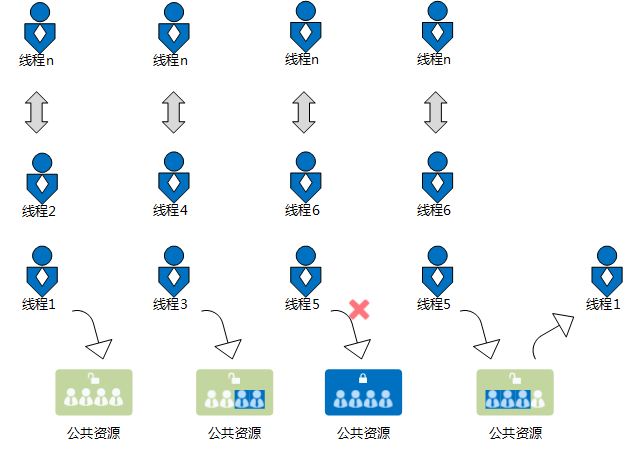
多任務環境下會存在多個任務訪問同一公共資源的場景,而有些公共資源是非共享的,需要任務進行獨占式處理。
互斥鎖怎樣來避免這種沖突呢?
在任意時刻,互斥鎖的狀態只有兩種:開鎖和閉鎖。
當有任務持有時,互斥鎖處于閉鎖狀態,這個任務獲得該互斥鎖的所有權。當該任務釋放它時,該互斥鎖被開鎖,任務失去該互斥鎖的所有權。當一個任務持有互斥鎖時,其他任務將不能再對該互斥鎖進行開鎖或持有。
那么,當一個互斥鎖為加鎖狀態時,此時其他任務如果想訪問這個公共資源則會被阻塞,直到互斥鎖被持有該鎖的任務釋放后,其他任務才能重新訪問該公共資源,此時互斥鎖再次上鎖,如此確保同一時刻只有一個任務正在訪問這個公共資源,保證了公共資源操作的完整性。
1.3. 互斥鎖的使用場景
互斥鎖可以提供任務之間的互斥機制,用來防止兩個任務在同一時刻訪問相同的共享資源。
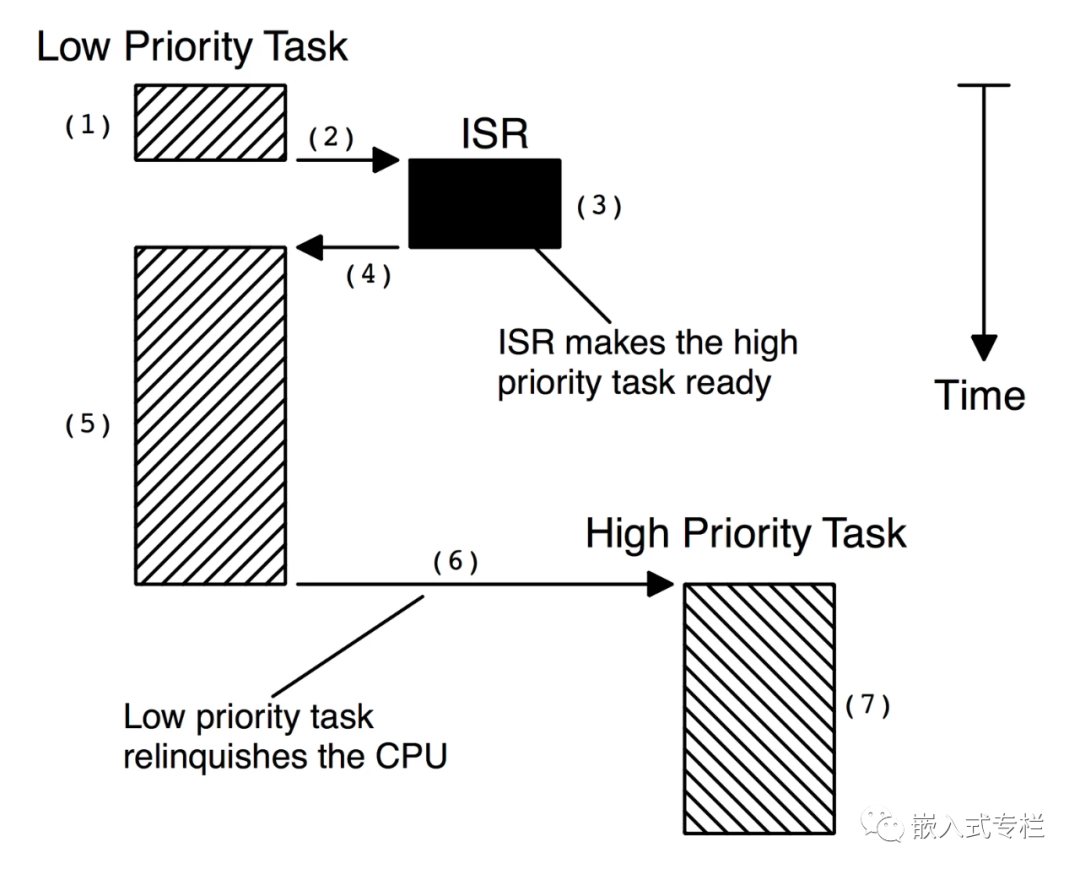
除此之外,互斥鎖還可以被用于防止多任務同步時造成優先級翻轉的問題。
2. 互斥鎖API
Huawei LiteOS 系統中的互斥鎖模塊為用戶提供創建/刪除互斥鎖、獲取/釋放互斥鎖的功能。
Huawei LiteOS 系統中提供的互斥鎖 API 都是以 LOS 開頭,但是這些 API 使用起來比較復雜,所以本文中我們使用 Huawei IoT Link SDK 提供的統一API接口進行實驗,這些接口底層已經使用 LiteOS 提供的API實現,對用戶而言更為簡潔,API列表如下:
osal的api接口聲明在
相關的接口定義在osal.c中,基于LiteOS的接口實現在 liteos_imp.c文件中:
| 接口名 | 功能描述 |
|---|---|
| osal_mutex_create | 創建互斥鎖 |
| osal_mutex_del | 刪除互斥鎖 |
| osal_mutex_lock | 獲取互斥鎖(上鎖) |
| osal_mutex_unlock | 釋放互斥鎖(解鎖) |
?
2.1. osal_mutex_create
osal_mutex_create接口用于創建一個互斥鎖,其接口原型如下:
bool_t??osal_mutex_create(osal_mutex_t?*mutex) { ????bool_t?ret?=?false;????if((NULL?!=?s_os_cb)?&&(NULL?!=?s_os_cb->ops)?&&(NULL?!=?s_os_cb->ops->mutex_create)) ????{ ????????ret?=?s_os_cb->ops->mutex_create(mutex); ????}????return?ret; }
該接口的參數說明如下表:
| 參數 | 描述 |
|---|---|
| mutex | 互斥鎖索引ID的地址 |
| 返回值 | false - 創建失敗 |
| 返回值 | true - 創建成功 |
?
2.2. osal_mutex_del
osal_mutex_del接口用于刪除一個互斥鎖,其接口原型如下:
bool_t??osal_mutex_del(osal_mutex_t?mutex) { ????bool_t?ret?=?false;????if((NULL?!=?s_os_cb)?&&(NULL?!=?s_os_cb->ops)?&&(NULL?!=?s_os_cb->ops->mutex_del)) ????{ ????????ret?=?s_os_cb->ops->mutex_del(mutex); ????}????return?ret; }
該接口的參數說明如下表:
| 參數 | 描述 |
|---|---|
| mutex | 互斥鎖索引ID |
| 返回值 | false - 刪除失敗 |
| 返回值 | true - 刪除成功 |
?
2.3. osal_mutex_lock
osal_mutex_lock接口用于獲取一個互斥鎖,其接口原型如下:
bool_t??osal_mutex_lock(osal_mutex_t?mutex) { ????bool_t?ret?=?false;????if((NULL?!=?s_os_cb)?&&(NULL?!=?s_os_cb->ops)?&&(NULL?!=?s_os_cb->ops->mutex_lock)) ????{ ????????ret?=?s_os_cb->ops->mutex_lock(mutex); ????}????return?ret; }
| 參數 | 描述 |
|---|---|
| mutex | 互斥鎖索引ID |
| 返回值 | false - 申請失敗 |
| 返回值 | true - 申請成功 |
?
2.4. osal_mutex_unlock
osal_mutex_unlock接口用于釋放一個互斥鎖,如果有任務阻塞等待該互斥鎖,則喚醒最早被阻塞的任務,該任務進入就緒態,并進行調度。
其接口原型如下:
bool_t??osal_mutex_unlock(osal_mutex_t?mutex) { ????bool_t?ret?=?false;????if((NULL?!=?s_os_cb)?&&(NULL?!=?s_os_cb->ops)?&&(NULL?!=?s_os_cb->ops->mutex_unlock)) ????{ ????????ret?=?s_os_cb->ops->mutex_unlock(mutex); ????}????return?ret; }
該接口的參數說明如下表:
| 參數 | 描述 |
|---|---|
| mutex | 互斥鎖索引ID |
| 返回值 | false - 釋放失敗 |
| 返回值 | true - 釋放成功 |
?
3. 動手實驗 —— 使用互斥鎖進行資源保護
實驗內容
本實驗中將創建兩個任務,一個低優先級任務task1,一個高優先級任務task2,兩個任務之間依次對共享資源上鎖、操作、解鎖,在串口終端中觀察兩個任務的運行情況。
實驗代碼
首先打開上一篇使用的 HelloWorld 工程,基于此工程進行實驗。
在Demo文件夾右擊,新建文件夾osal_kernel_demo用于存放內核的實驗文件(如果已有請忽略這一步)。
接下來在此文件夾中新建一個實驗文件?osal_mutex_demo.c,開始編寫代碼:

/*?使用osal接口需要包含該頭文件?*/#include?
編寫完成之后,要將我們編寫的 osal_mutex_demo.c文件添加到makefile中,加入整個工程的編譯:
這里有個較為簡單的方法,直接修改Demo文件夾下的user_demo.mk配置文件,添加如下代碼:
#example?for?osal_mutex_demoifeq?($(CONFIG_USER_DEMO),?"osal_mutex_demo")???? ????user_demo_src??=?${wildcard?$(TOP_DIR)/targets/STM32L431_BearPi/Demos/osal_kernel_demo/osal_mutex_demo.c} endif
添加位置如圖:

這段代碼的意思是:
如果 CONFIG_USER_DEMO 宏定義的值是osal_mutex_demo,則將osal_mutex_demo.c文件加入到makefile中進行編譯。
那么,如何配置 CONFIG_USER_DEMO 宏定義呢?在工程根目錄下的.sdkconfig文件中的末尾即可配置:

因為我們修改了mk配置文件,所以點擊重新編譯按鈕進行編譯,編譯完成后點擊下載按鈕燒錄程序。
實驗現象
程序燒錄之后,即可看到程序已經開始運行,在串口終端中可看到實驗的輸出內容:
linkmain:V1.2.1?AT?11:30:59?ON?Nov?28?2019WELCOME?TO?IOT_LINK?SHELL LiteOS:/> task2:?lock?a?mutex. task2:?public_value?=?5. task2:?unlock?a?mutex. task1:?lock?a?mutex. task1:?public_value?=?15. task1:?unlock?a?mutex. task1:?lock?a?mutex. task1:?public_value?=?25. task1:?unlock?a?mutex. task2:?lock?a?mutex. task2:?public_value?=?30. task2:?unlock?a?mutex. task1:?lock?a?mutex. task1:?public_value?=?40. task1:?unlock?a?mutex. task1:?lock?a?mutex. task1:?public_value?=?50. task1:?unlock?a?mutex. task2:?lock?a?mutex. task2:?public_value?=?55. task2:?unlock?a?mutex. task1:?lock?a?mutex. task1:?public_value?=?65. task1:?unlock?a?mutex. task1:?lock?a?mutex. task1:?public_value?=?75. task1:?unlock?a?mutex. task2:?lock?a?mutex. task2:?public_value?=?80. task2:?unlock?a?mutex. task1:?lock?a?mutex. task1:?public_value?=?90. task1:?unlock?a?mutex. task1:?lock?a?mutex. task1:?public_value?=?100. task1:?unlock?a?mutex. task2:?lock?a?mutex. task2:?public_value?=?105. task2:?unlock?a?mutex.
可以看到,系統啟動后,首先打印版本號,串口shell的優先級為10,最先打印shell信息,接下來task1先創建,但是優先級較低,所以后創建的task2搶占執行,task2獲取到互斥鎖,對共享資源進行操作,操作完畢解鎖,然后主動掛起,task1獲取到互斥鎖,對共享資源進行另一個操作,操作完畢解鎖,在task1操作的時候,task2早已掛起完畢,但是獲取不到互斥鎖,所以掛起等待,在task1解鎖后,堵塞的task2被喚醒開始執行。
































 工商網監
工商網監
評論