我使用加速度計LIS3DH監控設備角度的異常改變,但在應用中發現輕微振動和角度翻轉都會觸發中斷,喚醒MCU,無法實現低功耗。請問要如何設置才會讓加速度計LIS3DH輕微振動不觸發中斷,但是翻轉一定角度觸發中斷?
2024-03-22 07:03:41
相應地,對提供更高精度的IMU的需求正在上升,這對于姿態控制和噪聲性能至關重要。愛普生正是再這種對于高精度IMU的需求之下,開發新IMU產品M-G370PDS改善姿態和震動控制,來填補IMU需求
2024-03-21 10:11:17 32
32 
情況,不需要中斷的情況
我的測試環境:我把裝有加速度計的板子安裝在三軸云臺上,首先水平,讀出的X 是7.4° 然后三軸臺繞X軸旋轉三十度(三軸臺的精度是0.01°)此時讀出的角度是38.56°。但是在此位置
2024-03-18 07:08:06
單元(IMU)1。新產品計劃于2022年春季批量生產。愛普生的imu于2011年首次推出,已在一系列客戶應用中使用,以出色的性能和質量贏得了良好的聲譽。近年來,I
2024-02-28 14:52:1496 
精工愛普生公司(TSE:6724,“愛普生”)開發了M-G370PDG(“M-G370G”),擴展了其慣性測量單元1(IMU)陣容,該IMU配備了高性能的六自由度傳感器。M-G370G將于2023
2024-02-27 14:36:31119 
電子發燒友網站提供《RA生態系統合作伙伴解決方案提供卓越的平面航向和6軸IMU性能.pdf》資料免費下載
2024-02-19 09:46:22 0
0 ADXL103CE-REEL高性能加速度計性能指標解析摘要:本文將對ADXL103CE-REEL高性能加速度計的性能指標進行詳細解析,包括其測量范圍、分辨率、靈敏度、電源管理等方面。同時,還將介紹
2024-02-16 21:46:31
集成正交安裝的高精度MEMS陀螺儀和正交安裝的高精度MEMS加速度計,內置全溫零位誤差補償、安裝正交誤差補償、非線性誤差補償和g值敏感誤差補償等多種校準算法,采用雙排14針插針通過UART TTL通訊
2024-01-18 13:46:16
一般描述 M-G370PDF1是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角速率和線性加速度,并提供了高穩定性和高精度的測量能力與使用高精度補償技術。各種校準參數被存儲在IMU
2024-01-11 17:00:110 M-G370PDS0是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角率和線性加速度,并提供高穩定性和高精度的測量能力精密補償技術。各種校準參數被存儲在IMU的存儲器中,并且是
2024-01-11 09:55:450 當日,賽萊克斯北京獲得了某客戶的采購訂單,開始對首批MEMS-IMU 8英寸晶圓進行小批量生產。IMU是慣性測量定位中的核心部件,主要負責測量三軸姿態角和加速度。
2024-01-02 09:44:37282 ADXL001系列加速度計怎么設置成我想要的合適帶寬呢?輸出端外接無源RC低通濾波器可以嗎?
2023-12-29 08:13:13
請問如何針對加速計的非線性度(Non-linearity)進行校正?
假設我的加速計ADXL313在45度角的輸出為722,經過Offset校正與后為720,但sin(45) = 0.707
2023-12-29 07:25:41
ADIS16 IMU2和ADIS1644X/FLEX在哪可以買到,自己做的話兩個電容是多大的,兩排管腳什么型號,有沒有關于ADIS16IMU2的詳細資料
2023-12-29 07:14:24
近期在使用ADXL1001加速度計時出現問題,具體表現為供電電壓為5V時加速度計沒有輸出電壓,所以我們無法判斷是加速度計本身有問題,還是我們電路設計有問題,電路原理圖如圖所示,電源為15V,經
2023-12-29 07:05:47
使用DSP的spi是四線制的,IMU上的中斷引腳可以怎么接?
2023-12-29 06:07:35
有個問題請教一下:在靜態測量的情況下,兩軸的加速度計在測得X、Y軸上的加速度后,是不是就可以根據這兩個值和重力加速度g算出Z軸方向的加速度,這樣的話XYZ三個方向的角度也可以推導出來。不知道我這種理解的問題在哪里?如果實這樣的話那么三軸加速度計有什么優勢。
2023-12-29 06:06:29
想問一下ADIS16405 三軸加速度計的單位是m/s平方 還是g
三軸陀螺儀的單位是度/秒嗎?
2023-12-28 08:18:56
配置imu,后直接讀取傳感器的數據,debug看數據的話,數據明顯不對,這個是什么問題;tips:在配置的時候進行了恢復工廠校準。第一張圖是配置imu,第二張是讀取數據,第三張是實時顯示讀取的數據,imu放在桌子上,三軸的角速度都不對,加速度值是對的
2023-12-28 08:09:02
大家好,最近我在使用ADIS16448做IMU和GPS的融合。IMU主要是完成卡爾曼濾波里預測的步驟,所以我需要為我的IMU設置系統噪聲參數Q。然而在ADIS16448的參數表里,我似乎找不到相應
2023-12-28 08:04:44
如圖所示,在和ADIS16460慣導SPI通信時候,讀取狀態/錯誤的狀態,出現傳感器超出范圍,應該怎么解決?目前是product_id、溫度值讀取上來數據都是正確的,器件放置于桌子上,三軸加速度的值
2023-12-28 07:49:46
我現在采集到的ADIS16477-2的imu數據,測試陀螺、加速度計的漂移非常大,IMU是放在臺面上鏡子不動的。
下圖第一排陀螺x、y、z的原始數據,第二排分別是5s鐘平滑后的數據。
下圖第一排
2023-12-28 07:25:03
ADIS16488或者16480中,有關加速度計的輸出都是多少g,請問這個g等于多少m/s^-2,是9.8還是9.78還是多少?有沒有一個確定的值?
2023-12-28 06:37:37
我想問下ADXL1004加速度計背面引腳的材料是什么?我想從背面引線出來,需要知道引腳的材料來確定引線的材料
2023-12-28 06:25:51
12月27日,導遠電子獲得DEKRA德凱頒發,國內首張高精度定位IMU模組ISO 26262 ASIL B功能安全產品認證證書,標志著導遠IMU5104成為首個獲得ISO 26262功能安全認證的車載IMU模組產品。
2023-12-27 17:07:27300 adxl356加速度計輸出10g,正常嗎,分辨率80mv/g?
2023-12-27 06:50:17
IMU開發
ELF 1搭載了六軸運動跟蹤傳感器 ICM20607,集成了三軸加速度計和三軸陀螺儀,那么我們就可以簡單的進行開發,將角速度和加速度的數值進行數據融合,計算出開發板當前的姿態,也就是俯仰
2023-12-13 15:48:08
村田MEMS慣性測量單元(IMU)SCHA634產品分析
2023-11-27 16:27:32387 
PMT-CSP02導管導絲滑動性能測試儀產品簡介PMT-CSP02導管滑動性能測試儀根據《YY/T 1536-2017 非血管內導管表面滑動性能評價用標準試驗模型》 、《T CAMDI
2023-11-23 15:48:47
億元。目前國產高性能三軸芯片自主可控已突破,放量在即百億市場有望迎來爆發 ○IMU(慣性測量單元)通過測量物體加速度和角速度的變化來推算出物體在三維空間中的位置和姿態。目前高精度MEMS IMU民用市場,主要應用場景包括高精度自動駕駛以及人形機器人。 ○
2023-11-23 09:19:11416 如何在單電源(+5V)供電的情況下用于壓電式加速度計的阻抗匹配(電壓放大器或電荷放大器)?
2023-11-22 07:29:42
作為無人車以及智能機器人而言,在裝配過程中各個傳感器之間的外參標定一直是比較頭疼的問題。這里作者也系統的學習了一下,傳感器的外參標定和在線標定問題。 下圖是我們常用的幾個坐標系,而對于常用
2023-11-20 15:34:23416 
醫用導管/導絲滑動性能(摩擦力)測試儀產品介紹 一次性醫用導管/導絲滑動性能(摩擦力)測試儀,專業適用于導尿管、導尿管、球囊導管、氣管插管等一次性非血管內導管/導絲表面的摩擦力、往返摩擦力
2023-11-14 15:49:53
慣性測量單元(英語:Inertialmeasurementunit,簡稱IMU)是測量物體三軸姿態角(或角速率)以及加速度的裝置。一般的,一個IMU內會裝有三軸的陀螺儀和三個方向的加速度計,來測量
2023-11-04 08:30:18184 
現在想利用3軸加速度計計算Z方向的角度,但是網上都說需要磁力計,請教有沒有一位大神知道在沒有磁力計的情況下如何計算Z方向角度
2023-10-30 07:05:34
電子發燒友網站提供《基于NRF24L01的IMU數據無線傳輸系統設計.doc》資料免費下載
2023-10-26 11:21:470 大多數IMU傳感器由兩組不同的傳感器組成——加速度計傳感器和陀螺儀傳感器。加速度計傳感器測量三個正交軸上的線性加速度。對加速度積分,獲得速度,而對隨時間改變的速度積分,位置會隨之改變。
2023-10-25 11:37:011662 
SynSense時識科技今日正式發布全新XyloIMU類腦開發套件。這款新的HDK使用戶能夠開發基于IMU的運動處理應用,例如人體運動分析、人機互動及工業檢測等應用開發。
2023-09-28 15:25:472291 自制云臺相機不一定要很笨重,試用MPU6050加速計、陀螺儀傳感器與Arduino就可以!同時將解釋MPU6050的工作原理以及如何從中讀取數據,然后我們將給出兩個實際例子。
2023-09-26 06:14:20
脫穎而出,一路沖刺到全國總決賽,斬獲殊榮!
本篇優秀作品:2023集創賽全國總決賽紫光同創杯賽一等獎獲獎作品,來自北京郵電大學+逐日隊的內容分享。
獲獎作品:《多通道高性能視頻采集與加速系統》
獲獎
2023-09-21 17:34:51
,分別討論了運算子系統和存儲子系統的設計,其它部分的內容可以看目錄.
第二章的標題是運算子系統的設計 2。1節從加速器要包含的模塊和組成關系開始,介紹了神經網絡加速器的模塊: DMA,加速器外部的數據
2023-09-17 16:39:45
本文檔旨在提供 ST IIS3DHHC 運動傳感器相關的使用信息和應用提示。IIS3DHHC 是系統級封裝的 3D 加速度計,具有數字 SPI 串口標準輸出,超低噪聲性能,并能在不同時間和溫度條件下
2023-09-13 07:16:41
該應用筆記介紹了一種低g三軸加速度計的傾斜檢測理論和傾斜角測量方法。一般來說,這里描述的程序也可以應用于三軸模擬或數字加速度計,這取決于它們各自的規格。
2023-09-13 07:11:00
本文檔旨在提供ST eCompass六軸慣性傳感器模塊相關的使用信息和應用提示。LSM303AGR是系統級封裝的3D數字磁力計和3D數字加速度計,具有數字I2C和3線SPI接口標準輸出,在組合
2023-09-13 07:02:17
本文檔旨在提供 STAIS2DW12 運動傳感器相關的使用信息和應用提示。AIS2DW12 是一種超低功耗三軸線性加速度計,設計用于處理非安全汽車應用,利用了已用于微型機械加速度計生產的穩健成熟
2023-09-13 06:33:38
本應用筆記旨在提供 ST IIS2DLPC 運動傳感器相關的使用信息和應用提示。IIS2DLPC 是系統級封裝的 3D 數字加速度計,具有數字 I2C/SPI 串口標準輸出和±2/±4/±8/±16
2023-09-13 06:18:06
、衛星天線、平臺調平、太陽能電池板、車輛、照相機、手機等方面,以及工業和醫療平臺調平領域。傾斜估測中使用的典型技術包括液體電容傳感、液體中的氣泡、電解質、MEMS 加速度計或 imu。MEMS 傾角計因其
2023-09-08 07:03:21
LIS2DH12 是屬于“nano”系列的超低功耗高性能 3 軸線性加速度計,具有數字 I2C、SPI 串行接口標準輸出。器件具有超低功耗工作模式,可實現高級節能、智能睡眠喚醒以及恢復睡眠功能
2023-09-06 08:20:21
LSM303AH是系統級封裝的3D數字磁力計和3D數字加速度計,具有數字I2C和3線SPI接口標準輸出。由于磁力計和加速度計均具有超低噪聲性能,始終具有低功耗特性,并結合了高傳感精度,因此能夠為客戶提供最佳運動體驗。器件具有超低功耗工作模式,可實現高級節能、智能睡眠喚醒以及恢復睡眠功能。
2023-09-06 08:11:31
LSM303AGR是系統級封裝的3D數字磁力計和3D數字加速度計,具有數字I2C和3線SPI接口標準輸出,在組合高分辨率模式下功耗250 μA,在組合低功耗模式下功耗不超過60 μA。由于磁力計和加速度計
2023-09-06 08:01:39
該應用筆記介紹了一種低g三軸加速度計的傾斜檢測理論和傾斜角測量方法。一般來說,這里描述的程序也可以應用于三軸模擬或數字加速度計,這取決于它們各自的規格。
2023-09-06 07:43:53
LIS2DS12 是系統級封裝的 3D 數字加速度計,具有數字 I2C/SPI 串口標準輸出,在高分辨率模式下功耗 150 μA,在低功耗模式下功耗不超過 80 μA。由于加速度計具有超低噪聲性能
2023-09-06 07:41:47
LSM6DS3:始終開啟的 3D 加速度計和 3D 陀螺儀LSM6DS3 是系統級封裝的 3D 數字加速度計和 3D 數字陀螺儀,具有數字 I2C/SPI 串口標準輸出,在組合正常工作模式下 6 軸
2023-09-06 06:57:13
LSM6DSO 是系統級封裝的 3D 數字加速度計和 3D 數字陀螺儀,具有數字 I2C、SPI 和 MIPI I3CSM 串口標準輸出,組合工作在高性能模式下功耗只要 0.55 mA。由于陀螺儀和加速度計
2023-09-06 06:56:33
LSM6DSL 是系統級封裝的 3D 數字加速度計和 3D 數字陀螺儀,具有數字 I2C/SPI 串口標準輸出,在組合高性能工作模式下 6 軸功耗 0.65 mA。由于陀螺儀和加速度計均具有超低
2023-09-06 06:12:07
LSM6DSM 是系統級封裝的 3D 數字加速度計和 3D 數字陀螺儀,具有數字 I2C/SPI 串口標準輸出,組合工作在高性能模式下功耗只要 0.65mA。由于陀螺儀和加速度計均具有超低噪聲性能
2023-09-06 06:03:20
LIS2DW12 是系統級封裝的 3D 數字加速度計,具有數字 I2C/SPI 串口標準輸出,在高分辨率模式下功耗 90 μA,在低功耗模式下功耗低于 1 μA。由于加速度計具有超低噪聲性能,始終
2023-09-06 06:03:15
如題,想知道關于m052的UID的介紹,但是在手冊上沒有找到,誰知道在哪呀?
2023-08-24 07:59:51
關于農林氣象站的基本介紹
2023-08-23 16:58:56220 。TDK集團在V2X方面擁有各類電子元件產品,但本篇文章中僅對遠程信息車聯網?控制組件(TCU) 介紹IMU (慣性測量設備)以及高頻產品。 目錄 關于遠程信息車聯網?控制組件(TCU) 關于IMU (慣性測量設備) 關于高頻產品 ·貼片天線 ·高頻電路用電感器 總結
2023-08-22 17:02:511032 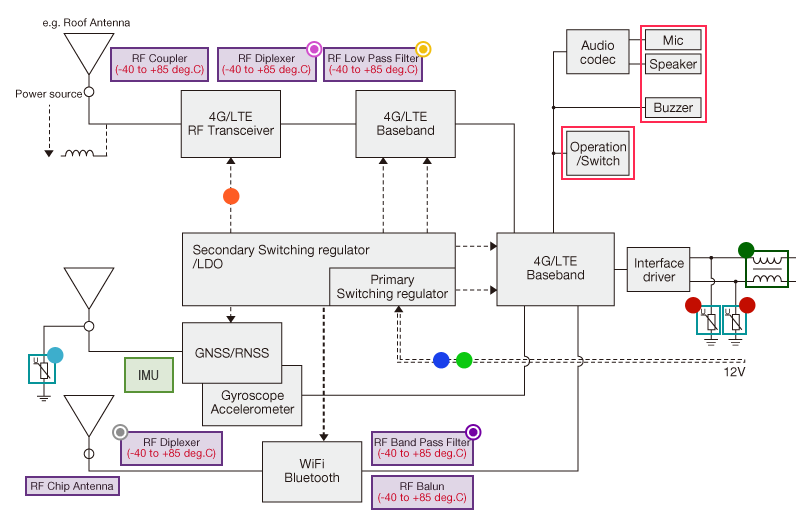
情況,不需要中斷的情況
我的測試環境:我把裝有加速度計的板子安裝在三軸云臺上,首先水平,讀出的X 是7.4° 然后三軸臺繞X軸旋轉三十度(三軸臺的精度是0.01°)此時讀出的角度是38.56°。但是在此位置
2023-08-07 14:45:41
隨著視頻、語音識別、自然語言處理、推薦系統等中基于圖像和手勢識別的應用和服務的數量不斷增加,對高性能人工智能訓練計算的需求迅速增加,并在加速增長。隨著需求的增加,需要更高的訓練速度、吞吐量和容量
2023-08-04 06:48:48
廣。 ? MEMS 重要類別——IMU ? 慣性測量單元一直是MEMS市場里重要的產品類型,主要包括加速度計、陀螺儀和磁力計。如今,由分立的慣性測量單元組合成的三軸、六軸、九軸IMU,將加速度傳感器、陀螺儀、磁傳感器等MEMS器件集成在一起,以滿足生產
2023-08-01 00:08:001007 ADIS16467 是一款精密微電子機械系統 (MEMS) 慣性測量單元 (IMU),它包括一個三軸陀螺儀和一個三軸加速度計。 ADIS16467 中的每個慣性傳感器均結合了信號調節功能以優化動態
2023-07-21 10:18:16
ADIS16465 是一款精密微電子機械系統 (MEMS) 慣性測量單元 (IMU),它包括一個三軸陀螺儀和一個三軸加速度計。 ADIS16465 中的每個慣性傳感器均結合了信號調節功能以優化動態
2023-07-21 10:15:52
ADIS16477是一款精密、微型MEMS慣性測量單元(IMU),內置一個三軸陀螺儀和一個三軸加速度計。ADIS16477中內置的每個慣性傳感器都結合了信號調理技術,可優化動態性能。工廠校準針對各
2023-07-21 10:01:16
ADIS16507 是一款精密的微型微機電系統 (MEMS) 慣性測量單元 (IMU),它包括一個三軸陀螺儀和一個三軸加速度計。ADIS16507 中的每個慣性傳感器均
2023-07-21 09:53:45
ADIS16505 是一款精密的微型微機電系統 (MEMS) 慣性測量單元 (IMU),它包括一個三軸陀螺儀和一個三軸加速度計。ADIS16505 中的每個慣性傳感器均結合了可優化動態性能的信號調節
2023-07-21 09:50:40
ADIS16500 是一款精密的微型微機電系統 (MEMS) 慣性測量單元 (IMU)。它包括一個三軸陀螺儀和一個三軸加速度計。ADIS16500 中的每個慣性傳感器均結合了可優化動態性能的信號調節
2023-07-21 09:47:47
ADIS16006是一款完整的低成本、低功耗、雙軸加速度計,采用集成式串行外設接口(SPI)。SPI接口上還提供集成的溫度傳感器。該器件的滿量程加速度測量范圍為±5 g(最小值),既可以
2023-07-21 09:24:27
ADXL337是一款小尺寸、薄型、低功耗、完整的三軸加速度計,提供經過信號調理的電壓輸出,能以最小±3 g的滿量程范圍測量加速度。它可以測量傾斜檢測應用中的靜態重力加速度,以及
2023-07-20 16:09:54
ADXL288是一個帶信號調理輸出的雙軸加速度計,通過一個16位SPI接口實現。采用相同、獨立的X和Y檢測結構來創建一個高性能和高集成度的加速檢測系統。 X和Y加速通道的標稱
2023-07-18 15:42:46
陀螺儀和加速度計是IMU的主要部件,其精度直接影響慣性系統的精度。在實際工作中,由于各種不可避免的干擾因素,陀螺儀和加速度計會產生誤差。從初始對準開始,其導航誤差隨著時間的推移而增大,尤其是位置誤差
2023-07-14 13:45:421987 加速度傳感器是一種能夠測量物體加速度的傳感器設備。它在許多領域中得到廣泛應用,包括汽車、航空航天、醫療設備、智能手機等。本文將詳細介紹加速度傳感器的性能參數、工作原理、發展趨勢和未來應用。
2023-07-09 10:13:393721 越來越多的機器人系統配備了多個慣性測量單元(IMU)。由于競爭性目標,當用于控制時期望靠近重心,或者在與外部感知傳感器集成時為了獲得無阻礙的視野,單個IMU經常被安裝在相當遠的距離上。
2023-07-08 09:41:451103 
? 這篇文章會提供一些 優化代碼的工具 。會讓代碼變得更簡潔,或者更迅速。 當然這些并不能代替算法設計,但是還是能讓 Python 加速很多倍。 這篇文章主要講 優化單處理器的代碼 ,下面會介紹一些
2023-07-07 11:19:25203 電子發燒友網站提供《帶步進器和IMU的M5Stick-C.zip》資料免費下載
2023-06-20 11:08:360 ,獲2輪及以上融資的企業占比達54%。
02
生態伙伴介紹:灣加速
灣加速是領先的創業加速器,聚焦科技創新,立足于粵港澳大灣區,面向全球整合資源,匯聚科創企業和生態伙伴 ,致力于打造科創生態,加速
2023-06-16 16:00:14
功能、濾波、相對讀數、校零、聲音提示報警功能、自動量程等功能。
美國Lake Shore410高斯計產品介紹:美國Lake Shore 410可以對0.1G到20KG(0.01mT to 2T
2023-06-15 11:07:08
移動機器人需要一種對環境干擾具有魯棒性的可靠位姿估計器,為此,慣性測量單元(IMU)發揮了重要作用,因為它們可以獨立感知車輛的全運動狀態。
2023-06-02 14:55:51562 
到,IMU-TK 這個開源工具是基于此論文為理論依據開發的。IMU-TK 這個工具用來標定確定性誤差(系統誤差),是一個基于C++的開源IMU數據處理庫,用于處理慣性測量單元(IMU)數據,包括加速度計、陀螺儀和磁力計等傳感器。該庫提供了一組API,可以用于讀取IMU數據、進行校準、等操作。
2023-05-24 17:28:59827 
電子發燒友網報道(文/李寧遠)隨著先進雷達系統的精度和分辨率呈指數級提升,獨立陣列設計得越來越大,先進的雷達系統必須集成眾多IMU系統以確保雷達升級后對更高性能的支持。 ? 各種地面相控陣運動系統
2023-05-09 00:07:00977 ,我可以記錄溫度、濕度,并感知一些傾斜信息。
然而,這并不是我所期望的。我想測量用于測量俯仰角和滾動角的加速度計的輸出。有沒有一種方法可以讓我使用 JTAG(LPC-Link 2)與電路板通信,在
2023-05-06 06:20:34
據麥姆斯咨詢報道,近期,新納傳感(ACEINNA)宣布高性能慣性測量單元(IMU)IMU330RA全面上市。
2023-04-26 10:21:361140 
電子發燒友網報道(文/梁浩斌)隨著汽車智能化的滲透,輔助駕駛系統以及車載導航幾乎已經成為了目前乘用車的標配產品。而在這兩項功能中,慣性傳感器IMU都起到了不可或缺的作用,IMU通過MEMS技術
2023-04-07 01:10:003634 
現在精度最好的imu一個小時會累積幾十米的誤差,價格上百萬美元,用在洲際彈道導彈上的(你老板買得起?)。幾萬美元價位的imu,一分鐘的位置誤差計算下來大概是5米,注意是一分鐘,由于加速度二次積分后,得到的位置與時間是二次關系,即位置誤差隨時間呈拋物線增長。
2023-04-06 10:14:252065 EVALBOARDFORADIS16IMU4
2023-03-30 12:04:37
IMU ACCEL/GYRO/MAG 3-AXIS SPI
2023-03-28 19:37:18
IMU ACCEL/GYRO/MAG 3-AXIS SPI
2023-03-28 19:37:16
其他消費電子設備。它內置一個三軸 MEMS 陀螺儀、一個三軸 MEMS 加速度計、一個數字運動處理引擎(DMP)以及用于第三方的數字傳感器接口的輔助 I2C 端口(常用于擴展磁力計)。當輔助 I2C 端口
2023-03-28 14:46:13
品牌:ST型號:LSM6DS3TR-C批號:2023+封裝:LGA-14數量:20000制造商:STmicroelectronics產品種類:IMU-慣性測量單元系列:LSM6DS3TR-C商標
2023-03-23 15:03:32
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論