機器人元器件 機器人套件
2024-03-14 22:03:38
機器人元器件 機器人套件
2024-03-14 20:37:55
以完成高效的焊接任務。在本文中,跟隨創想焊縫跟蹤系統小編一起了解焊接機器人工作站由哪些部分構成?各有什么作用? 1.機器人系統 焊接機器人工作站的核心是機器人系統。這個系統通常包括機械臂、控制器和傳感器。機械臂是
2024-01-30 15:21:28 99
99 產品特點1、適合于大幅面空間焊接,機器人智能化操作,靈活可靠,可以六軸聯動,可任意空間焊接,不局限于平面焊接;2、可以根據生產需求而定制夾具;3、實現雙工位或多工位焊接操作,節省產品安裝夾具時間
2024-01-04 13:57:58
Emo是一款基于樹莓派4做的個人伴侶機器人,集時尚與創新于一身。它不僅僅是一款機器人,更是一個活生生的存在,與其他機器人不同,它擁有獨特的個性和情感。
硬件部分
樹莓派 4B
微雪 2 英寸
2023-12-26 15:18:26
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
。
它,就是可以自平衡的賽車機器人——B_ROBOT_100ASK
項目簡介
本項目基于jjrobots的開源項目B-ROBOT EVO2進行復刻,與原開源項目不一樣的地方是,作者將原本適配
2023-12-20 10:22:18
直角坐標機器人是一種可重復編程、多自由度、運動自由度建成空間直角關系的自動化設備,廣泛應用于自動化生產線、裝配線、檢測線等場合。其特點包括高精度、高速度、高可靠性、易于編程和控制等,具有廣泛的應用前景和發展空間。
2023-12-19 13:40:23506 
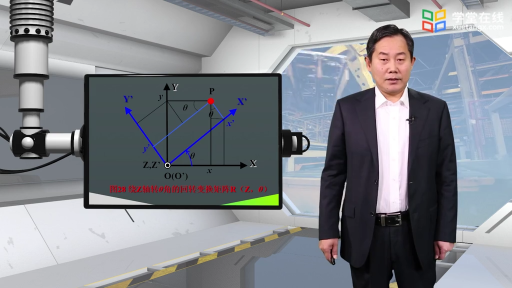
這次的文章,我們來看一看三維空間直角坐標系的平移和旋轉變換,盡管這個內容早已見諸文獻資料,但自己在看書籍以及期刊論文時,總是遇到讓人百思不得其解的事情,就是不同的文獻給出的同類型的旋轉矩陣居然有不一樣的,這讓小D對文獻中的公式產生了懷疑,也不知道哪個旋轉矩陣才是對的。
2023-12-18 09:48:05841 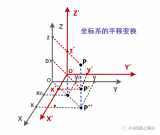
大大提高了工作效率,也極大地提升了實驗精度。自動移液機器人是一種能夠代替人工進行精確液體操作的自動化設備。它通過精密的機械結構和先進的控制系統,實現了對微小液體體積的準
2023-12-06 11:21:24
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞
2023-11-30 16:01:01
坐標系是我們非常熟悉的一個概念,也是機器人學中的重要基礎,在一個完整的機器人系統中,會存在很多坐標系,這些坐標系之間的位置關系該如何管理? ROS給我們提供了一個坐標系的管理神器——TF。 機器人
2023-11-22 17:20:23460 
大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯動的和帶有外軸的機器人會用到,90%的大地坐標系與基坐標系是重合的。但是在以下兩種情況大地坐標系與基坐標系不重合。
2023-11-13 11:24:46673 
pic單片機做掃地機器人有什么優勢
2023-11-09 07:24:46
在編程操作過程中,為了確定機器人的空間位置以及姿態的變化,需要建立合適的工具和用戶坐標系。工具坐標系用于確定每個工具中心點(TCP)的位置和工具姿勢。
2023-11-07 11:44:28228 
2023-11-06 08:31:31 0
0 怎樣精準的通過軟件模擬滿足I2C總線的時序及各部分定時的要求?
2023-11-03 06:23:19
機器人編程需要什么軟件
2023-11-01 07:34:30
復變量z與復變量s之間的關系為z=esT(或s=lnz/T),其中s=σ+jω,T為采樣周期。s表示直角坐標,z表示極坐標
2023-10-31 11:00:423278 
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
2023-10-21 20:59:28
焊接機器人常用的四種坐標系:關節坐標系、直角坐標系、工具坐標系和用戶坐標系。 ??關節坐標系: ??關節坐標系是焊接機器人中最基本的坐標系之一。它表示機器人的各個關節的位置,通常使用關節角度或編碼器值來定義。每
2023-10-18 15:17:21422 
本文檔的主要內容詳細介紹的是Arduino教學機器人的使用教程
2023-09-27 06:53:26
使用Arduino和PAJ7620手勢傳感器制作手勢控制機器人,簡單程序即可實現。小小的傳感器可以識別各種手勢。它采用內置的空間傳感器,可以感知接近和離開的對象。
2023-09-27 06:17:05
在本項目中,我們將學習如何使用帶PID控制器的線跟隨機器人使用Arduino Nano來解決迷宮。
2023-09-25 06:54:13
的運營成本、人力成本還在不斷提高(如:辦公場地的租金、員工的工資、社保公積金、節假日福利等)。
如今的智能電話機器人,每天的電話撥打量可達800-1000通,相比人工提高了3-5倍,大大縮短了名單的篩選
2023-09-21 11:09:59
邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調節,長時間佩戴不會使患者產生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術,為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步機器人BEAR-H系列是用于輔助腦卒中患者步態康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關節提供助力完成行走訓練,可以節省人力,并提高康復效果
2023-09-20 17:25:48
利用 Matlab 建立移動機器人的動力學模型 ,在虛擬現實 (VR )環境下 ,實時仿真移動機器人路徑跟蹤的運動特性 ,為基于 Internet 的機器人遙操作試驗搭建了仿真平臺 。 實驗結果表明
2023-09-20 06:24:09
產品介紹小安值班機器人是集電力監控系統、動環輔控系統、巡檢機器人“三合一"功能產品,在自學習算法和大數據的加持下,具備強大的AI能力,可實現配電室的數字化及無人值守。 特色功能全感知電力
2023-08-22 14:57:47
機器人的動作流程
三、草莓采摘機器人的控制系統設計
1、硬件部分介紹
草莓采摘機器人設計的硬件控制系統框圖如圖2.1所示,包括核心控制單元、傳感器、驅動器等。核心控制單元包括單片機和樹莓派,樹莓派
2023-08-16 17:35:54
本案例是西門子1200PLC通過PROFINET轉EtherNet網關連接發那科搬運機器人配置案例。所需設備:西門子1200PLC、Profinet轉EtherNet IP網關、Fanuc機器人
2023-08-03 17:58:40
傳統關節機器人主要由本體結構件、減速器、伺服電機、控制器等構成。
2023-07-24 11:08:051314 
開關電源因具有體積小、重量輕、效率高、發熱量低、性能穩定等優點而逐漸取代傳統技術制造的連續工作電源,并廣泛應用于電子整機與設備中。本文將詳細介紹開關電源電路組成及各部分功能,感興趣的朋友可以了解一下哦。
2023-07-19 15:47:581740 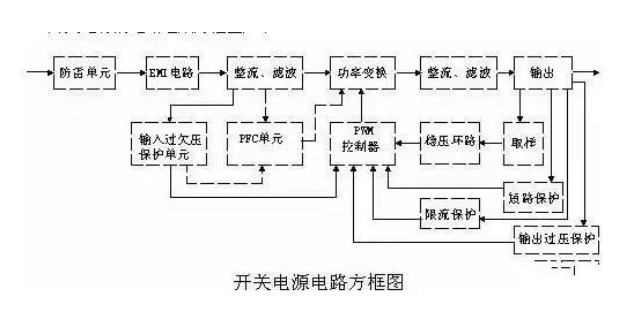
MRC3100系列AMR移動機器人控制器,適用潛伏頂升式、協作(復合)式、輥筒式等差速底盤類型移動機器人,內置激光導航及二維碼導航算法,支持差速底盤運動模型。MRC3100系列自帶豐富的I/O資源
2023-07-11 10:12:02
..
05GNSS導航
通過GNSS導航模塊接收GPS衛星信號進行導航定位。一般采用偽距差分動態定位法,用基準接收機和動態接收機共同觀測4顆GPS衛星,按照一定的算法即可求出某時某刻機器人的三維位置坐標。差分動態
2023-06-28 09:52:41
直流電源的組成及各部分的作用
2023-06-08 22:50:22
不要被復雜的生產線嚇倒,生產線可以看成多個單獨的設備或機器人,每部分完成一個功能。
2023-06-08 17:40:58
凡編程,一定要輸出機器人后部的坐標。
能夠確保一次調試成功。
而且后部坐標是有規律的,一定是前左后右,前上后下。
多數人只考慮到前部撞機,卻忘記了后部也會撞機。
2023-06-08 17:34:39
自編程是如何完成的。
自編程其實也不是很高深的問題。
當用戶給出參數時,有時也包括邏輯。
例如用戶說,如果設備打開完畢,執行一個命令。
這個例子就包括了一個如果。你的智能機器人只需要生成一個
2023-06-08 16:20:45
一幀。
而機器人能提供些什么動作呢?它主要提供幾個圓的轉動和距離。難度多是三維坐標以及圓形,三角形的計算。如果要更智能,需要加入眼睛,耳朵等其它功能。它主要要生產一個產品的建模數據。或者障礙物,設備
2023-06-06 16:18:33
ENU局部坐標系采用三維直角坐標系來描述地球表面,實際應用較為困難,因此一般使用簡化后的二維投影坐標系來描
述。
UTM:在眾多二維投影坐標系中,統一橫軸墨卡托(The Universal
2023-06-01 15:59:510 我正在開發一些 WSN 機器人,
我現在正在使用 2 個 ESP8266,一個充當 WSN 傳感器節點,另一個充當機器人節點,
機器人在從其他 WSN 傳感器節點獲取數據時正在工作(現在亮起LED
2023-05-22 09:55:59
模型要具備齒輪,導軌幾種基本的運動原理。
要分辨基本圖形,視覺模型要能分辨圓形,方形和三角形。
有了這兩點,機器人就基本上能計算開模和注塑這種簡單的工作了。要替代人類的工作,還要進一步學習。
2023-05-19 20:40:25
在編程操作過程中,為了確定機器人的空間位置以及姿態的變化,需要建立合適的工具和用戶坐標系。工具坐標系用于確定每個工具中心點(TCP)的位置和工具姿勢。
2023-05-12 14:43:421108 
一般都會定義機器人第一軸的旋轉軸為基坐標系Z軸,旋轉中心即是坐標系原點,X和Y的方向是的電機零點確定,所以只要你不更換電機的零點和機械結構,單個機器人里這個基坐標系是永遠不會變的!
2023-05-11 15:57:441025 
兒童陪護機器人越來越受到人們的關注,其中轉動控制是其重要組成部分之一。步進電機芯片作為一種常用的控制芯片,被廣泛應用于兒童陪護機器人中的轉動控制。本文將從步進電機芯片的工作原理、優勢和應用場景等方面
2023-05-11 15:12:45
無線通信系統由哪幾部分組成?各部分起什么作用?
2023-05-09 16:20:43
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
RJU系列關節模組——面向商業、生活服務類應用一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身
2023-04-19 15:23:14
泰科關節機器人具備哪些優勢? 一、編程簡單可以讓無編程經驗的操作人員能快速設置和操作我們的直觀、3D 可視化協作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 15:03:00
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:43:30
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:39:15
深圳泰科智能TA6系列協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:53:03
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:48:11
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-19 10:40:37
TB6-R3協作機器人是一款靈活的小型工業協作機器人,其精巧的機械結構設計,外形緊湊,能夠適應狹小的工作空間,及高精密的工作任務需求;這款協作機器人自重僅為11.5KG,有效負載為3KG,工作半徑達666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:18:50
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-19 10:05:39
TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作機器人功能強大、高自重負載比、高可靠性、模塊化關節設計,易于末端擴展外部設備,可以實現快速安裝部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。-
2023-04-19 09:22:29
TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產應用需求。模塊化
2023-04-19 09:16:32
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
產品優勢專注機器人關節研發,RJS系列關節模組具有定位精度高、性能可靠等特點。 模塊化設計RJS關節模組集成無框電機、驅動器、諧波減速器、編碼器、制動器于一體,結構小巧緊湊,6軸RJS關節
2023-04-18 14:04:34
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-17 18:01:33
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 17:40:55
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。
2023-04-17 16:36:37
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 16:12:03
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:57:13
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:31:15
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:25:07
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:15:06
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:07:26
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
口上面,當機器人開始加水時,傳感器會檢測水位并將數據發送到一個微處理器。微處理器會根據清水箱的容量,來判斷是否需要再次填充水。如果水位已滿,機器人將停止加水。污水箱中也有水位傳感器,但這個傳感器測量
2023-04-15 11:21:46
,構建智慧運維軟件平臺,實現對該空間內的基礎屬性做常態化的檢測,來保證設施的正常運轉。智能巡檢機器人一般分為三大部分——機器人運行部分、物聯傳感部分和應用部分,分別用來“保障機器人的正常運行”、“感知
2023-04-12 15:49:23
書特色本書從一個編譯器開發者的視角,帶領讀者在ART的世界里進行遨游,和大家一起了解ART的各部分及其主要流程。本書在編寫的過程中,力圖將ART的整體架構梳理清楚,包括在介紹其中的模塊的時候,也是將
2023-04-11 08:33:53
Frenet坐標系的建立基于一個參考線,這個參考線可以是任意曲線,但在自動駕駛運動規劃中一般定義為道路的中心線,這條中心線是地圖模塊輸入過來的一系列離散點。同時使用參考線的切線向量和法線向量建立一個直角坐標系,如圖1所示,這個坐標系就是Frenet坐標系。
2023-04-03 10:16:421570 弧焊機器人的構成及安裝調試,弧焊機器人由機器人主體、工具機構、控制系統以及配套設備等組成,安裝調試,包括機械、電氣與軟件的調試、參數設置等。
2023-03-27 14:14:131501 工業機器人的基本構成,可參見圖 3 和圖 4 。圖 3 為一臺電動機驅動的工業機器人,圖 4 為一臺液壓驅動的工業機器人。焊接機器人基本上都屬于這兩類工業機器人,弧焊機器人大多采用電動機驅動機器人,因為焊槍重量一般都在 10kg 以內
2023-03-24 10:24:001763 
工業機器人產業鏈主要是由機器人零部件生產企業、機器人本體生產企業、代理商、系統集成商、最終用戶構成。本體是機器人產業鏈的核心,通常,本體企業設計本體、編寫軟件,采購通過代理商銷售給系統集成商,系統集成商直接面向終端客戶。有的本體企業和代理商也會兼做系統集成商。
2023-03-24 09:50:18606
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論