電子發(fā)燒友網(wǎng)報(bào)道(文/莫婷婷)6月26日,廣汽召開2023廣汽科技日發(fā)布會(huì),會(huì)上帶來了行業(yè)首款分離式飛行汽車——GOVE,此外還有氫能整車技術(shù)、氨發(fā)動(dòng)機(jī)技術(shù)、N合一電驅(qū)技術(shù)、廣汽魔方ADIGO
2023-06-27 00:24:00 1111
1111 
無人機(jī)(UAV)的最大安全飛行速度是衡量其在完成各種任務(wù)時(shí)效率的重要指標(biāo)。該指標(biāo)受諸多參數(shù)影響,如無人機(jī)定位誤差、感知范圍和系統(tǒng)延遲等。
2024-03-22 10:32:5714 
隨著許多eVTOL開發(fā)人員正在為他們的首次飛行做準(zhǔn)備,AeroHT繼續(xù)展示為什么它是該領(lǐng)域的領(lǐng)導(dǎo)者之一。今天早些時(shí)候,小鵬汽車的空中部門在中國廣州市上空進(jìn)行了首次成功的全電動(dòng)X2“飛行汽車
2024-03-18 08:44:57
據(jù)悉,GOVE采用純電動(dòng)技術(shù),通過陸空兩棲設(shè)計(jì)理念,實(shí)現(xiàn)地面行駛、空中飛行以及空地對(duì)接三種模式。該款車型最大起飛重量可達(dá)到550公斤,最大航程30公里,由廣汽ADiGO-Pilot駕駛系統(tǒng)與雙備份多旋翼飛行系統(tǒng)共同保證飛行安全性。
2024-03-10 10:14:10573 據(jù)介紹,“旅航者X2”在天德廣場的超甲級(jí)寫字樓群內(nèi)垂直起飛,首度嘗試了自動(dòng)駕駛模式,飛行線路穿過了如廣東省博物館、花城廣場、海心沙亞運(yùn)公園等象征廣州特色的地標(biāo)位置。
2024-03-08 13:38:47124 在直接飛行時(shí)間(dToF)傳感器領(lǐng)域處于前沿地位,二十億顆FlightSense? dToF傳感器產(chǎn)品銷量,意法半導(dǎo)體再次發(fā)力,針對(duì)相機(jī)輔助功能、增強(qiáng)現(xiàn)實(shí)(AR)/虛擬現(xiàn)實(shí)(VR)、3D網(wǎng)絡(luò)攝像頭、機(jī)器人、智能建筑等重點(diǎn)目標(biāo)應(yīng)用,推出直接飛行時(shí)間和間接飛行時(shí)間(iToF)傳感器;
2024-03-06 09:34:28158 “飛行汽車”首飛成功 想必很多人都對(duì)上下班高峰期堵車深痛惡絕;如果有飛的那就不一樣了,在天空總不會(huì)再堵車了吧? 日前上海峰飛航空科技有限公司成功完成全球首條電動(dòng)垂直起降航空器跨海跨城空中航線的首飛
2024-02-28 15:09:001358 VL53L5、VL53L7、VL53L8都是基于意法半導(dǎo)體(ST)的FlightSense技術(shù)的多區(qū)飛行時(shí)間(ToF)傳感器。
2024-02-28 09:53:46219 
???????? VL53L5、VL53L7、VL53L8都是基于ST的FlightSense技術(shù)的多區(qū)飛行時(shí)間(ToF)傳感器。
2024-02-25 09:41:20191 
如果你對(duì)飛行時(shí)間不了解,別擔(dān)心,你來對(duì)地方了。飛行時(shí)間一詞幾乎就是字面意思,只不過飛行的對(duì)象是波長為940納米,肉眼完全不可見的“光子”。我們發(fā)出一束激光;光子撞擊某個(gè)物體并反彈回來。當(dāng)光子反彈
2024-02-19 12:23:33287 
廣東匯天是一家專注于飛行汽車產(chǎn)業(yè)的公司,目前由小鵬汽車的主要擁有者何小鵬的掌控中。廣東小鵬作為小鵬汽車旗下的獨(dú)立分支經(jīng)營著設(shè)計(jì)和研發(fā)工作。這個(gè)合作計(jì)劃包含兩個(gè)重要的方面:飛行汽車及陸行體。
2024-01-03 10:16:00346 AWMF-0145 Rx 波束形成器 IC產(chǎn)品概述37-40 GHz 單極化四路 4x1 Rx 波束形成器 ICAWMF-0145 是一款高度集成的硅四核 Rx IC,適用于 5G 相控陣應(yīng)用。該器件支持四個(gè)輻射元件,包括用于模擬射頻波束控制的 5 位相位控制和 5 位增益控制。該器件包括溫度增益補(bǔ)償、溫度報(bào)告、Tx 功率遙測(cè)以及使用片上波束權(quán)重存儲(chǔ)寄存器的
2024-01-02 15:10:16
串聯(lián)諧振電路的三個(gè)特征? 串聯(lián)諧振電路是一種重要的電路結(jié)構(gòu),具有許多特征和應(yīng)用。本文將詳細(xì)介紹串聯(lián)諧振電路的三個(gè)主要特征,并對(duì)其原理和應(yīng)用進(jìn)行詳細(xì)討論。 首先,串聯(lián)諧振電路具有共振頻率。共振頻率
2023-12-20 14:54:04516 如何分辨晶振腳位?有什么特征呢? 晶振(Crystal Oscillator)是電子電路中一種常用的時(shí)鐘源,用于產(chǎn)生規(guī)律的、穩(wěn)定的時(shí)鐘信號(hào)。在實(shí)際的電路設(shè)計(jì)與制作中,分辨晶振腳位是一項(xiàng)非常重要的任務(wù)
2023-12-18 14:36:35297 sgnx函數(shù)的概念、特征和用途 sgnx函數(shù)是一種特殊的數(shù)學(xué)函數(shù),用于對(duì)實(shí)數(shù)進(jìn)行非線性變換。 在數(shù)學(xué)中,sgnx函數(shù)被定義為一個(gè)單側(cè)函數(shù),它的值取決于自變量的符號(hào)。 當(dāng)自變量為正時(shí),sgnx函數(shù)
2023-12-11 13:38:39520 SENT總線的特征和優(yōu)勢(shì)? SENT總線是一種常用于計(jì)算機(jī)和電子設(shè)備之間的通信接口。它具有許多特征和優(yōu)勢(shì),使得它在現(xiàn)代電子領(lǐng)域中得到廣泛應(yīng)用。 首先,SENT總線是一種數(shù)字串行通信協(xié)議,它通過串行
2023-12-07 11:15:32560 硅光電倍增管用于直接飛行時(shí)間測(cè)距應(yīng)用(一):直接ToF測(cè)距系統(tǒng)的設(shè)計(jì)
2023-12-07 10:23:12267 
在一對(duì)圖像中尋找匹配的像素是具有各種應(yīng)用的基本計(jì)算機(jī)視覺任務(wù)。由于光流估計(jì)和局部特征匹配等不同任務(wù)的特定要求,以前的工作主要分為稠密匹配和稀疏特征匹配,側(cè)重于特定的體系結(jié)構(gòu)和特定任務(wù)的數(shù)據(jù)集,這可能在一定程度上阻礙了特定模型的泛化性能。
2023-11-27 11:32:24261 
您可以從曲面解除剪裁特征的結(jié)果中排除父曲面。在解除剪裁曲面PropertyManager 中的選項(xiàng)下,選擇排除父曲面以從曲面解除剪裁特征結(jié)果中排除父曲面。
2023-11-17 11:03:11176 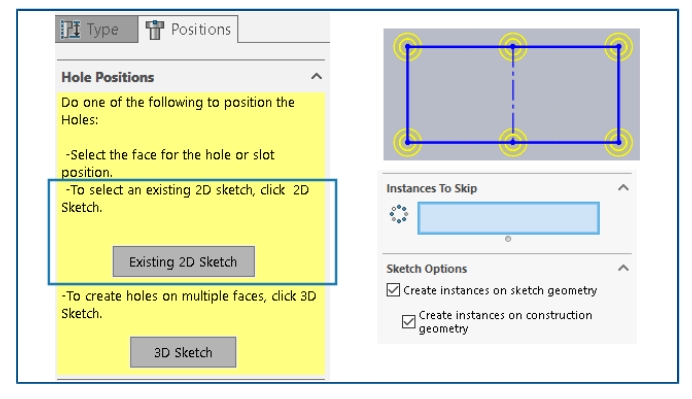
制作四軸飛行器使用什么電機(jī)驅(qū)動(dòng)模塊性價(jià)比高
2023-11-10 07:36:53
2023年以來,大圓柱電池的產(chǎn)業(yè)發(fā)展呈現(xiàn)出提速、提質(zhì)兩大特征。
2023-11-08 10:00:53485 你們正點(diǎn)原子的mini四軸飛行器的控制器是多少位的
2023-11-08 07:40:08
目前有微型四軸,也有像小米、大疆的四軸飛行器。
今天無刷的先不談,只談?dòng)兴⒌目招谋姍C(jī)。
1、目前用在四軸飛行器上的空心杯電機(jī)電機(jī)有哪些型號(hào)?
2、每種型號(hào)空心杯電機(jī)的最大升力好多、消耗電流多少?
電機(jī)與槳葉怎么選型,有什么關(guān)系,升力應(yīng)當(dāng)怎么計(jì)算?
2023-11-06 06:54:53
區(qū)域和輪廓只包含對(duì)分割結(jié)果的原始描述,在實(shí)際應(yīng)用中我們還需要從區(qū)域或輪廓中確定一個(gè)或多個(gè)特征量。這些確定的特征量被稱為特征。
2023-11-03 11:28:04162 
watsonx Code Assistant for Red Hat Ansible Lightspeed 和 watsonx Code Assistant for Z 現(xiàn)已可用 IBM
2023-11-01 10:05:01211 
360度沉浸式飛行影院LED顯示屏作為一種創(chuàng)新的電影科技形式,給觀眾帶來了前所未有的觀影體驗(yàn)。通過全方位的沉浸式體驗(yàn)、模擬飛行過程中的刺激感受以及個(gè)性化定制的內(nèi)容,讓您仿佛置身于影片中一同經(jīng)歷空中的冒險(xiǎn)旅程。在未來,隨著技術(shù)的不斷進(jìn)步和應(yīng)用領(lǐng)域的拓展,飛行影院有望成為電影產(chǎn)業(yè)的新熱點(diǎn)和重要發(fā)展方向。
2023-10-30 17:51:22847 
電子發(fā)燒友網(wǎng)站提供《基于ARM的嵌入式飛行控制計(jì)算機(jī)系統(tǒng)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-27 10:35:07 0
0 電子發(fā)燒友網(wǎng)站提供《飛行器LEMP危害及防護(hù)研究.pdf》資料免費(fèi)下載
2023-10-25 09:55:540 區(qū)域和輪廓只包含對(duì)分割結(jié)果的原始描述,在實(shí)際應(yīng)用中我們還需要從區(qū)域或輪廓中確定一個(gè)或多個(gè)特征量。這些確定的特征量被稱為特征。
2023-10-23 14:12:49325 
MSA-CNN模型結(jié)構(gòu) 基于多尺度注意力機(jī)制的卷積網(wǎng)絡(luò)模型(MSA-CNN)包括三個(gè)模塊,分別是多尺度卷積模塊、特征強(qiáng)化模塊和分類模型,其中多尺度卷積模塊和特征強(qiáng)化模塊是其核心。
2023-10-20 11:51:06253 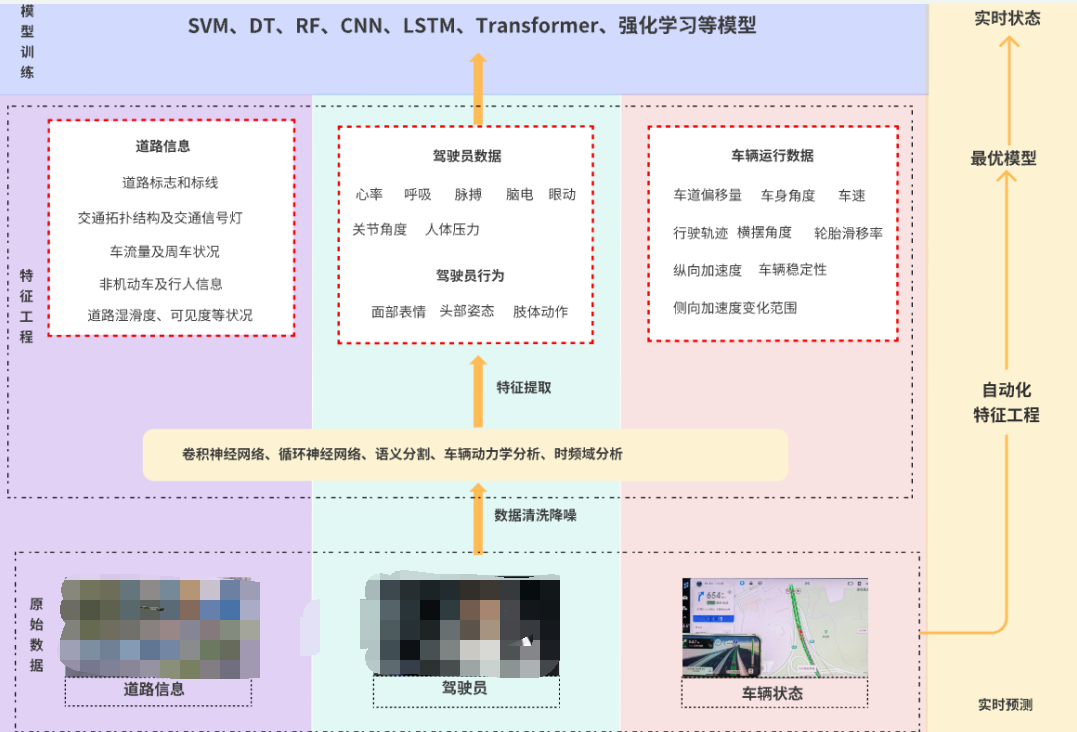
機(jī)器學(xué)習(xí)技術(shù)已被廣泛接受,并且很適合此類分類問題。基于卷積神經(jīng)網(wǎng)絡(luò)的雙重特征提取方法。提出的模型使用Radon拉冬變換進(jìn)行第一次特征提取,然后將此特征輸入卷積層進(jìn)行第二次特征提取。
2023-10-16 11:30:38380 
如果有一個(gè)包含數(shù)十個(gè)甚至數(shù)百個(gè)特征的數(shù)據(jù)集,每個(gè)特征都可能對(duì)你的機(jī)器學(xué)習(xí)模型的性能有所貢獻(xiàn)。但是并不是所有的特征都是一樣的。有些可能是冗余的或不相關(guān)的,這會(huì)增加建模的復(fù)雜性并可能導(dǎo)致過擬合。特征
2023-10-16 11:09:21252 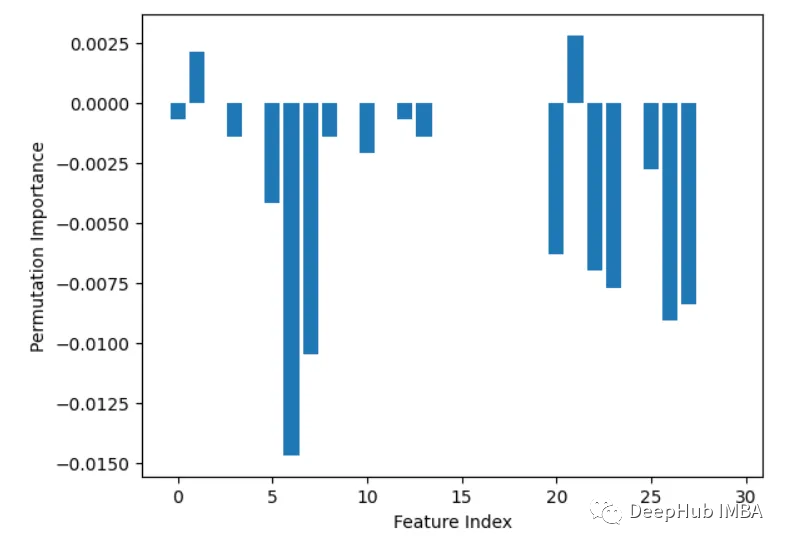
特征重要性分析用于了解每個(gè)特征(變量或輸入)對(duì)于做出預(yù)測(cè)的有用性或價(jià)值。目標(biāo)是確定對(duì)模型輸出影響最大的最重要的特征,它是機(jī)器學(xué)習(xí)中經(jīng)常使用的一種方法。
2023-10-13 12:32:04153 
幾年前,我試圖用一句話描述工業(yè)4.0最基本的特征。我提出,工業(yè)4.0最基本的特征是:流水線上的個(gè)性化定制。
2023-10-13 09:40:58191 電子發(fā)燒友網(wǎng)站提供《單片機(jī)在超小型無人飛行器控制系統(tǒng)中的應(yīng)用.pdf》資料免費(fèi)下載
2023-10-12 10:41:290 四軸在飛行的控制過程中可以用什么算法來控制?姿態(tài)
2023-10-12 07:03:10
電子發(fā)燒友網(wǎng)為你提供ADI(ADI)ADSD3100:1 MP, CMOS, 飛行時(shí)間, 后側(cè)光照傳感器數(shù)據(jù)表相關(guān)產(chǎn)品參數(shù)、數(shù)據(jù)手冊(cè),更有ADSD3100:1 MP, CMOS, 飛行
2023-10-10 18:35:25

為什么需要進(jìn)程 通常程序不能并發(fā)執(zhí)行,因?yàn)槌绦虿l(fā)執(zhí)行的結(jié)果,是不可再現(xiàn)的。為了使程序,可以并發(fā)執(zhí)行,且能對(duì)其加以描述和控制,引入了進(jìn)程的概念。 進(jìn)程的特征和定義 進(jìn)程是程序的一次執(zhí)行,是系統(tǒng)進(jìn)行
2023-10-08 15:29:53331 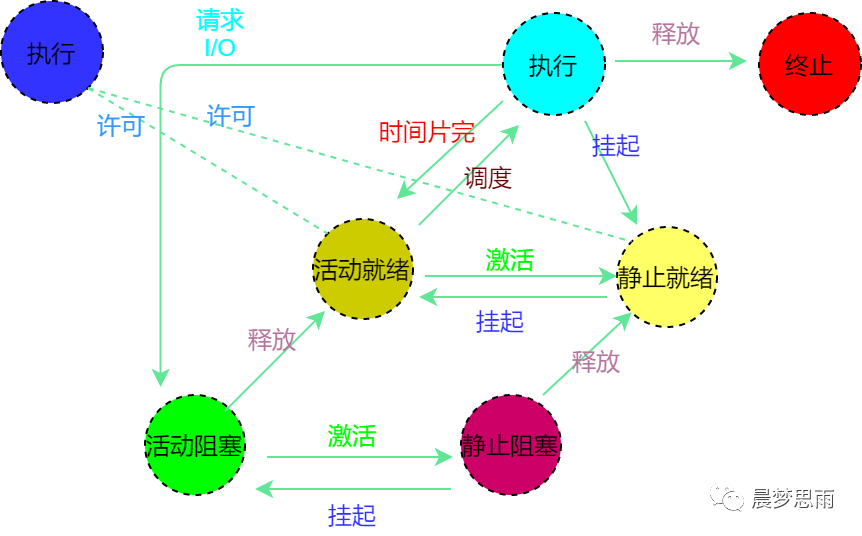
四軸飛行器電源控制采用的什么機(jī)制?
2023-10-08 10:18:22
電子發(fā)燒友網(wǎng)為你提供ADI(ADI)ADSD3030:VGA、CMOS、飛行時(shí)間、后側(cè)光照傳感器數(shù)據(jù)表相關(guān)產(chǎn)品參數(shù)、數(shù)據(jù)手冊(cè),更有ADSD3030:VGA、CMOS、飛行時(shí)間、后側(cè)光照傳感器數(shù)據(jù)表
2023-10-07 17:45:47
電子發(fā)燒友網(wǎng)站提供《空拍機(jī)飛行器獨(dú)立充電應(yīng)用.rar》資料免費(fèi)下載
2023-10-07 16:30:370 使用真實(shí)場景的車載激光點(diǎn)云和兩幅全景圖像進(jìn)行試驗(yàn),驗(yàn)證點(diǎn)-線特征聯(lián)合的位姿解算方法優(yōu)于單純的點(diǎn)特征解算方法。
2023-09-29 08:01:00307 
工業(yè)4.0、智能工廠有很多特征,我為什么選擇這兩個(gè)不起眼的特征呢?我的理由是:這兩個(gè)特征不僅通俗易懂,還能“綱舉目張”,把工業(yè)4.0、智能制造的許多技術(shù)引申出來,以便于理解這些技術(shù)的作用和相關(guān)的場景。
2023-09-27 11:20:26615 學(xué)習(xí)做四旋翼飛行器的參考資料,PCB和控制程序
2023-09-26 06:54:52
請(qǐng)問四軸飛行器可以用硬件實(shí)現(xiàn)平衡嗎
2023-09-25 07:40:35
是“電動(dòng)垂直起降飛行器”的簡稱,這是一種以清潔的電能為動(dòng)力,具有垂直起降功能的中短途飛行器,其概念是在2014年由美國直升機(jī)協(xié)會(huì)和美國航天航空協(xié)會(huì)提出的。2016年,Uber在此基礎(chǔ)上推出了“Uber Elevate”空中出租車計(jì)劃,由此引發(fā)了相關(guān)行
2023-09-20 08:10:01305 
構(gòu)建在空中實(shí)現(xiàn)翻滾與穩(wěn)定狀態(tài)轉(zhuǎn)換的折紙結(jié)構(gòu)微型飛行器,需要在折紙結(jié)構(gòu)、致動(dòng)器與能量收集電路之間進(jìn)行協(xié)同設(shè)計(jì),這增加了多重設(shè)計(jì)的挑戰(zhàn)。因此,研究人員精心設(shè)計(jì)了一種能夠提供微型飛行器所需的線性運(yùn)動(dòng)的電磁致動(dòng)器。
2023-09-19 10:05:031068 
MOS管特征頻率ft的影響因素是什么?? MOS管是一種廣泛應(yīng)用于電子領(lǐng)域的半導(dǎo)體器件,其性能取決于特征頻率ft,即展平后的頻率響應(yīng)特征。MOS管的特征頻率ft受多種因素的影響,下面就詳細(xì)介紹一下
2023-09-18 18:20:301731 摘要:介紹了飛行監(jiān)控系統(tǒng)軟件的組成、設(shè)計(jì)原理和工作流程,以及采用的關(guān)鍵技術(shù),并說明了系統(tǒng)在聯(lián)試過程中出現(xiàn)的問題和處理方法﹔飛行試驗(yàn)結(jié)果表明,本系統(tǒng)能夠?qū)崟r(shí)顯示無人機(jī)的飛行姿態(tài)、飛行軌跡、位置及參數(shù),實(shí)現(xiàn)任務(wù)航線的編輯、裝訂與顯示,發(fā)送飛行控制指令,實(shí)時(shí)性高,操作方便,連續(xù)工作48小時(shí)無異常。
2023-09-18 08:43:48
? ? ? ? ? ? 原文標(biāo)題:你身體里有光伏人基因嗎?6大職業(yè)特征 文章出處:【微信公眾號(hào):納芯微電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
2023-09-07 12:00:01198 
? 編者按:本文是高超聲速飛行推進(jìn)系統(tǒng)專題文章,給出了高超聲速飛行總體概念,確定了適合實(shí)現(xiàn)高超聲速飛行的兩種主要飛行器類型——高超聲速滑翔飛行器(HGV)和高超聲速巡航導(dǎo)彈(HCM),確定了其飛行
2023-09-04 11:47:391247 2023年8 月,大疆正式發(fā)布首款專為商用運(yùn)輸目的而設(shè)計(jì)運(yùn)載無人機(jī)DJI FlyCart 30,號(hào)稱兼顧飛行能力、安全性能、穩(wěn)定性及易用性,集大載重、長航程、強(qiáng)大的環(huán)境適應(yīng)性、穩(wěn)定的圖傳信
2023-09-04 11:35:421322 如果把智能中國比喻為一個(gè)有機(jī)體,那么返鄉(xiāng)青年們的飛行故事,就是其中一個(gè)組織切片
2023-09-04 09:08:34779 半導(dǎo)體區(qū)別于導(dǎo)體的重要特征? 半導(dǎo)體和導(dǎo)體是電子領(lǐng)域中的兩個(gè)重要概念,它們雖然有些相似,但是在性質(zhì)、應(yīng)用和制造過程等方面都有重要的區(qū)別。本文將詳細(xì)介紹半導(dǎo)體與導(dǎo)體的重要特征,以及它們之間的區(qū)別
2023-08-27 15:55:122666 在飛行器氣動(dòng)力/熱的仿真中,為什么有的工程師仿真結(jié)果與風(fēng)洞試驗(yàn)數(shù)據(jù)吻合較好,有的工程師差異較大?無非,就是它不行,還是自己不行的問題。
2023-08-22 12:22:55771 
取圖像中的特征點(diǎn),然后進(jìn)行特征匹配。但是在無紋理?xiàng)l件下,很難提取穩(wěn)定且重復(fù)的特征點(diǎn),這就導(dǎo)致SfM恢復(fù)出的位姿和三維點(diǎn)云非常雜亂。 很直接的一個(gè)想法就是,如果不提取特征點(diǎn),直接進(jìn)行匹配呢? 最近,浙江大學(xué)就基于這種思想提出了一種弱紋理場
2023-08-21 09:22:051064 
多軸飛行器因其結(jié)構(gòu)簡單,組裝方便,已經(jīng)越來越接近大家的生活。隨著MEMS傳感器、微控制器、電機(jī)和電池技術(shù)的發(fā)展和普及,多軸飛行器已經(jīng)成為微小型無人機(jī)中的新銳力量。直到今天,多軸飛行器已經(jīng)應(yīng)用到
2023-08-10 08:31:25419 
機(jī)器視覺與生物特征識(shí)別的關(guān)系 機(jī)器視覺和生物特征識(shí)別是目前科技領(lǐng)域非常熱門的方向。機(jī)器視覺是指利用電子設(shè)備來對(duì)物體進(jìn)行識(shí)別、分析和處理,尤其是指計(jì)算機(jī)對(duì)視覺信息的處理;而生物特征識(shí)別是指通過人體神經(jīng)
2023-08-09 17:43:57442 新時(shí)代的交通方式正在悄然萌芽,一個(gè)由電動(dòng)飛行汽車引領(lǐng)的未來已經(jīng)觸手可及。近日,美國聯(lián)邦航空局(FAA)向美國阿勒夫公司(Alef Aeronautics)開發(fā)的Model A電動(dòng)飛行汽車頒發(fā)了特殊適航證,準(zhǔn)許其在限定范圍內(nèi)進(jìn)行飛行測(cè)試。
2023-07-24 11:36:321055 
摘 要:在介紹人臉特征點(diǎn)檢測(cè)的理論知識(shí)的基礎(chǔ)上,提出了一種基于深層卷積神經(jīng)網(wǎng)絡(luò)(Deep ConvolutionalNeural Network,DCNN)解決人臉5點(diǎn)特征點(diǎn)(眼角、鼻子、嘴角)預(yù)測(cè)
2023-07-20 14:30:220 SDWAN產(chǎn)品的7大特征
2023-07-19 14:58:01213 本文比較了沒有特征選擇(即使用所有學(xué)習(xí)特征)和五種最先進(jìn)的特征選擇方法(第II-C節(jié))的WEFR的預(yù)測(cè)精度。對(duì)于五種最先進(jìn)的特征選擇方法,本文將所選特征的百分比從10%線性調(diào)整到100%,以找到最高的預(yù)測(cè)精度。
2023-07-12 09:09:52687 
教程 2:添加特征 - 自定義配置文件創(chuàng)建
2023-07-06 18:50:100 1 全球首款飛行汽車Model A獲準(zhǔn)試飛 近日,美國聯(lián)邦航空管理局(FAA)為一款被加利福尼亞州初創(chuàng)公司阿列夫汽車公司(Alef Automotive)描述為“飛行汽車”的交通工具M(jìn)odel
2023-07-06 11:11:05358 
XGBoost 中無需手動(dòng)編碼的分類特征
2023-07-05 16:30:37231 電子發(fā)燒友網(wǎng)站提供《Arduino和VL53L0X飛行時(shí)間+OLED顯示教程.zip》資料免費(fèi)下載
2023-07-03 09:37:442 何謂飛行時(shí)間(ToF)?飛行時(shí)間(ToF):助力實(shí)現(xiàn)三維體驗(yàn) 讓創(chuàng)意起飛 我們已習(xí)慣使用Microsoft Teams、Zoom和Google Meet來改善遠(yuǎn)程會(huì)議體驗(yàn)。但即便如此,所有這些互動(dòng)
2023-07-01 11:26:401406 隨著科技的發(fā)展以及軍事戰(zhàn)略思想的轉(zhuǎn)變,無人飛行器在軍事、民用領(lǐng)域具有廣泛的應(yīng)用前景和極其重要的現(xiàn)實(shí)意義。各國正在研制和開發(fā)各種性能獨(dú)特的無人飛行器, 改造的核心就是飛行控制系統(tǒng)。
2023-06-19 16:35:09680 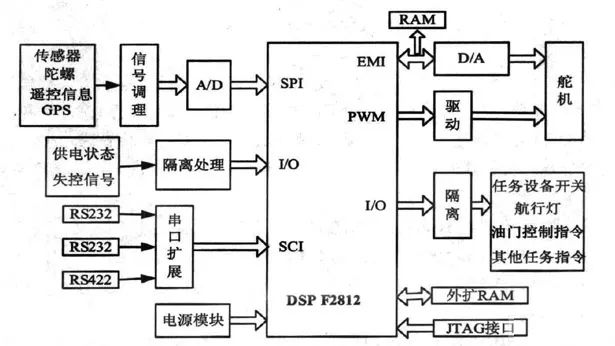
隨著科技的發(fā)展以及軍事戰(zhàn)略思想的轉(zhuǎn)變,無人飛行器在軍事、民用領(lǐng)域具有廣泛的應(yīng)用前景和極其重要的現(xiàn)實(shí)意義。各國正在研制和開發(fā)各種性能獨(dú)特的無人飛行器, 改造的核心就是飛行控制系統(tǒng)。
2023-06-19 16:31:46184 
? 我們都知道特征檢測(cè)和匹配是計(jì)算機(jī)視覺領(lǐng)域中的重要任務(wù),它們?cè)谠S多應(yīng)用中發(fā)揮著關(guān)鍵作用,比如SLAM、SFM、AR、VR等許多算法都需要穩(wěn)定精確的特征檢測(cè)和匹配。 特征檢測(cè)算法的意義在于從圖像
2023-06-16 16:48:28520 
MATLAB是一個(gè)數(shù)學(xué)軟件,它對(duì)矩陣運(yùn)算、線性方程組求解、特征值與特征向量等方面提供了強(qiáng)大的支持。
2023-06-16 16:06:051331 電子發(fā)燒友網(wǎng)站提供《Arduino Uno制作的四軸飛行器.zip》資料免費(fèi)下載
2023-06-15 09:26:363 在飛行器的控制中,姿態(tài)計(jì)算是至關(guān)重要的一步。姿態(tài)計(jì)算的目標(biāo)是確定飛行器相對(duì)于參考坐標(biāo)系的姿態(tài),通常以歐拉角(滾轉(zhuǎn)、俯仰和偏航)或四元數(shù)的形式表示。
2023-06-14 10:41:401250 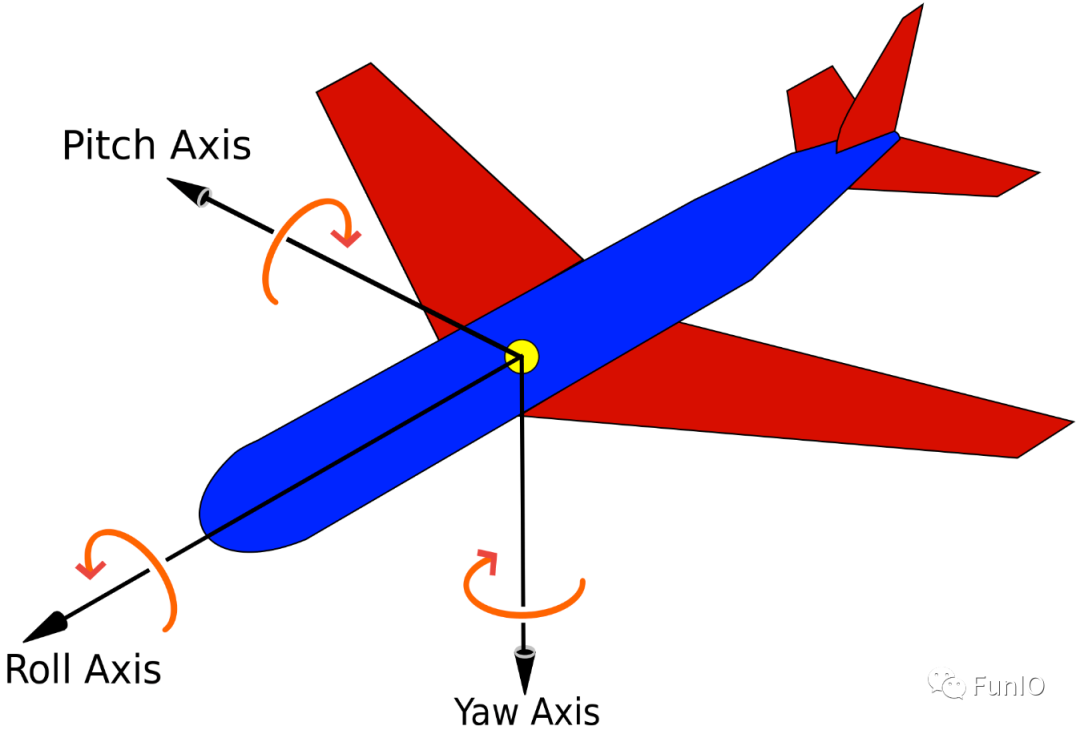
電子發(fā)燒友網(wǎng)站提供《用于飛行模擬器的帶Arduino的LCD面板.zip》資料免費(fèi)下載
2023-06-14 10:39:100 就是eVTOL(電動(dòng)垂直起降)飛行器(以下簡稱eVTOL)。 所謂eVTOL,是指以電力作為動(dòng)力來源且具備垂直起降功能的飛行器,與類似的傳統(tǒng)飛行器(如直升飛機(jī))相比,其在安全性、智能性、經(jīng)濟(jì)性和環(huán)保性等方面具有顯著的優(yōu)勢(shì),它既
2023-06-14 08:15:02511 
微流控技術(shù)對(duì)于航天飛行來說是一項(xiàng)重大技術(shù)創(chuàng)新,因?yàn)樗軌虿倏v微升到納升尺度的流體,并以很小的物理尺寸可靠地進(jìn)行高靈敏度的化學(xué)和生物分析。微流控平臺(tái)在尋找地外生命的有機(jī)生物特征方面尤其具有吸引力。例如
2023-06-12 10:22:14246 
云計(jì)算的基本特征包括資源共享、彈性伸縮、快速部署、按需自助服務(wù)、高可靠性、安全性、虛擬化技術(shù)以及持續(xù)集成和交付。這些特征使得云計(jì)算成為一種高效、靈活、可靠、安全的計(jì)算模式,被廣泛應(yīng)用于各個(gè)領(lǐng)域。
2023-06-01 18:13:423169 與其他類似產(chǎn)品相比,這個(gè)板子的優(yōu)勢(shì)在于它是專門為樹莓派計(jì)算模塊4而設(shè)計(jì)的,而其他飛行控制器則分別安裝在單個(gè)電路板上。
2023-05-29 10:00:24553 什么是頻譜型溫振變送器(附常見振動(dòng)故障特征)
2023-05-22 17:26:15436 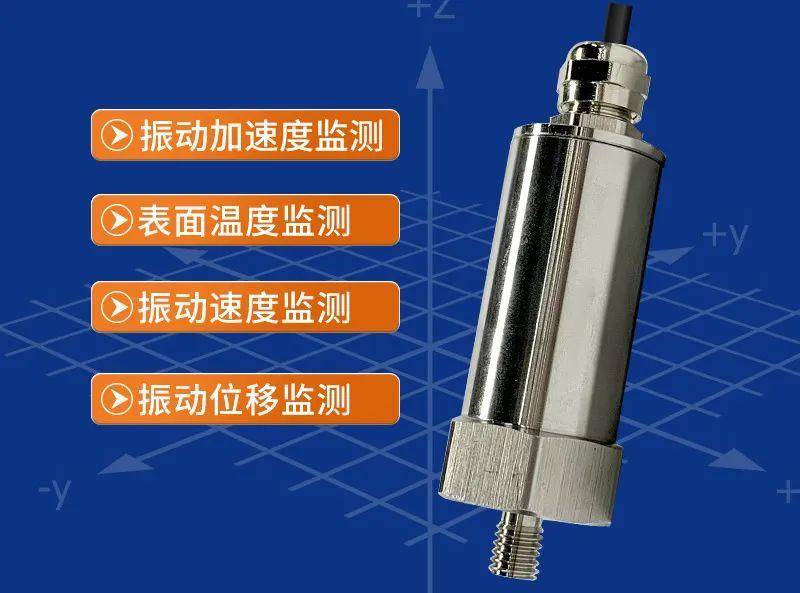
高超聲速飛行器作為一種能夠飛行在臨近空間的新型飛行器,正成為各軍事大國爭相發(fā)展的目標(biāo)。
2023-05-22 14:21:21479 
飛行器設(shè)計(jì)已經(jīng)超越了計(jì)算與繪圖的范疇,融入了許多工程要素,稱其為設(shè)計(jì)工程更為貼切。飛行器設(shè)計(jì)不僅要將客戶需求轉(zhuǎn)化為一組確定的參數(shù)(文檔、圖紙等),還要轉(zhuǎn)化為清晰可見的實(shí)物或半實(shí)物(樣機(jī)、原型機(jī)等)
2023-05-19 16:01:56717 
公里外的郊區(qū)住宅門口。 這個(gè)描述看似很科幻的場景,實(shí)則已離我們?cè)絹碓浇k妱?dòng)垂直起降飛行器(飛行汽車)無需跑道就能實(shí)現(xiàn)垂直起降,占用空間僅等同于車身體積的它,將飛出自由出行的新高度。這無疑滿足了人類繼飛機(jī)之后對(duì)于飛行
2023-05-18 19:10:012148 基于89C51單片機(jī)的數(shù)碼管飛行源程序
2023-05-15 10:31:000 據(jù)的定義沒有統(tǒng)一,但是國際知名咨詢公司IDC定義的大數(shù)據(jù)四個(gè)特征卻受到業(yè)界的廣泛接受,也就是4V特征——數(shù)據(jù)量大(Volume)、數(shù)據(jù)種類多(Variety)、數(shù)據(jù)價(jià)值密度低(Value) 以及數(shù)據(jù)產(chǎn)生和處理速度快(Velocity)。
2023-05-10 15:32:511147 產(chǎn)品特點(diǎn) 較好的分析效果; 精細(xì)測(cè)量; 較快和雙極性解決方案; 較大化質(zhì)量分辨率。 下面介紹幾款飛行時(shí)間探測(cè)器 相關(guān)應(yīng)用 審核編輯?黃宇
2023-05-08 07:16:04255 
( 四軸飛行器結(jié)構(gòu)圖) 參照飛行狀態(tài)表變化電機(jī)轉(zhuǎn)速,由于四個(gè)電機(jī)轉(zhuǎn)速不同,使其與水平面傾斜一定角度,如圖l所示。四個(gè)電機(jī)產(chǎn)生的合力分解為向上的升力與前向分力。
2023-05-06 09:49:582670 
CA850 Ver.3.20 C編譯器運(yùn)行包
2023-05-04 19:03:380 特征工程是機(jī)器學(xué)習(xí)過程中的關(guān)鍵步驟,涉及將原始數(shù)據(jù)轉(zhuǎn)換為機(jī)器學(xué)習(xí)算法可以有效使用的格式。在本篇博客文章中,我們介紹了各種特征工程技術(shù),包括特征選擇和提取、編碼分類變量、縮放和歸一化、創(chuàng)建新特征、處理不平衡數(shù)據(jù)、處理偏斜和峰度、處理稀有類別、處理時(shí)間序列數(shù)據(jù)、特征轉(zhuǎn)換和文本預(yù)處理。
2023-04-19 11:38:51702 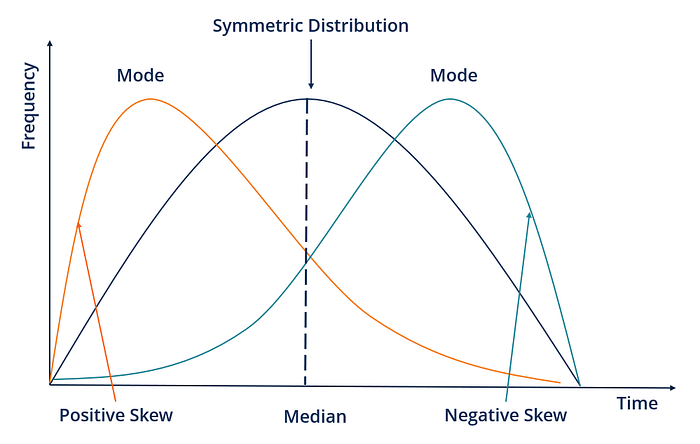
特征工程是機(jī)器學(xué)習(xí)過程中的關(guān)鍵步驟,涉及將原始數(shù)據(jù)轉(zhuǎn)換為機(jī)器學(xué)習(xí)算法可以有效使用的格式。在本篇博客文章中,我們介紹了各種特征工程技術(shù),包括特征選擇和提取、編碼分類變量、縮放和歸一化、創(chuàng)建新特征、處理不平衡數(shù)據(jù)、處理偏斜和峰度、處理稀有類別、處理時(shí)間序列數(shù)據(jù)、特征轉(zhuǎn)換和文本預(yù)處理。
2023-04-19 11:38:47560 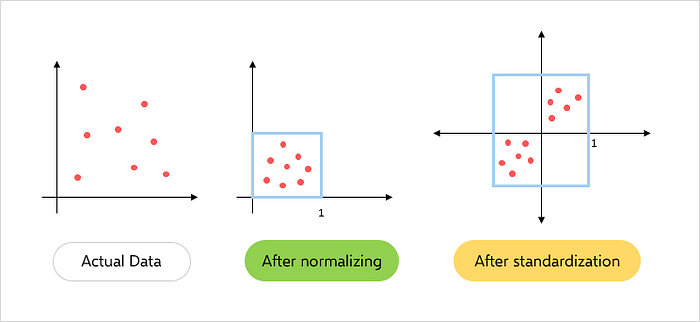
特征工程是機(jī)器學(xué)習(xí)過程中的關(guān)鍵步驟,涉及將原始數(shù)據(jù)轉(zhuǎn)換為機(jī)器學(xué)習(xí)算法可以有效使用的格式。在本篇博客文章中,我們介紹了各種特征工程技術(shù),包括特征選擇和提取、編碼分類變量、縮放和歸一化、創(chuàng)建新特征、處理不平衡數(shù)據(jù)、處理偏斜和峰度、處理稀有類別、處理時(shí)間序列數(shù)據(jù)、特征轉(zhuǎn)換和文本預(yù)處理。
2023-04-19 11:38:43517 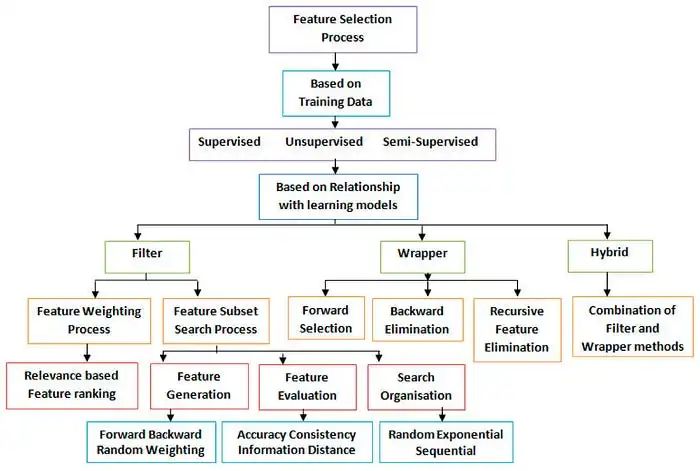
我們總會(huì)提取給定對(duì)象的固有屬性-特征。本章主要描述IEC 61000-4-2定義ESD脈沖特征。
2023-04-14 11:04:23900 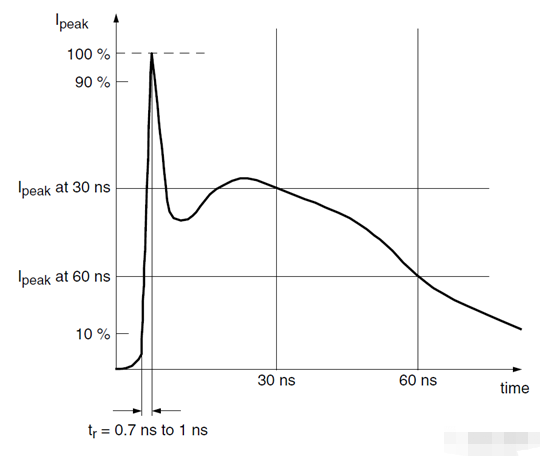
作者:Ahzam Ejaz 來源: DeepHub IMBA 卷積神經(jīng)網(wǎng)絡(luò)(cnn)是一種神經(jīng)網(wǎng)絡(luò),通常用于圖像分類、目標(biāo)檢測(cè)和其他計(jì)算機(jī)視覺任務(wù)。CNN的關(guān)鍵組件之一是特征圖,它是通過對(duì)圖像
2023-04-12 10:25:05516 LightSpeed于2021年由首席執(zhí)行官Rohin Kumar Y博士和首席技術(shù)官Ramana V.Pamidighantam共同創(chuàng)立,專為需要實(shí)時(shí)處理的數(shù)據(jù)帶寬密集型應(yīng)用建構(gòu)緊湊型光電處理器和互連模塊包。
2023-04-11 11:24:01216 皮革污水處理一直是制革行業(yè)的一大難題。污水中包含的多種污染物質(zhì)對(duì)周邊環(huán)境及人民生活健康產(chǎn)生負(fù)面影響,通過PLC數(shù)據(jù)采集遠(yuǎn)程監(jiān)控的物聯(lián)網(wǎng)方案,不僅具有可觀的經(jīng)濟(jì)效益,也具備明顯的環(huán)境效益
2023-03-30 13:56:4866 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論