在嵌入式芯片AD采樣的時(shí)候,需要根據(jù)基準(zhǔn)電壓確定采樣值和顯示值反映實(shí)際的數(shù)值關(guān)系;
1、基準(zhǔn)電壓是3V,2^12次方4096級(jí)采樣,也就是0-3V對(duì)應(yīng)0-4095,假設(shè)此時(shí)軟件依舊按照3.3V的基準(zhǔn)
2024-03-21 21:54:19
隨著科技的日新月異,激光技術(shù)已成為現(xiàn)代工業(yè)領(lǐng)域不可或缺的重要力量,行業(yè)競(jìng)爭(zhēng)更是愈演愈烈。在這波詭云譎的劇變中,大族激光作為行業(yè)的標(biāo)桿,始終保持著穩(wěn)健而堅(jiān)定的前行步伐。憑借著卓越的技術(shù)底蘊(yùn)和不斷追求
2024-03-19 15:45:30 100
100 
基準(zhǔn)電壓源在電子領(lǐng)域中扮演著至關(guān)重要的角色,它為各種應(yīng)用提供了穩(wěn)定、可靠的電壓。為了確保電路的準(zhǔn)確性和可靠性,工程師需要關(guān)注和評(píng)估基準(zhǔn)電壓源的技術(shù)指標(biāo)。衡量基準(zhǔn)電壓源的技術(shù)指標(biāo)有很多,下面將詳細(xì)介紹
2024-03-14 11:22:41108 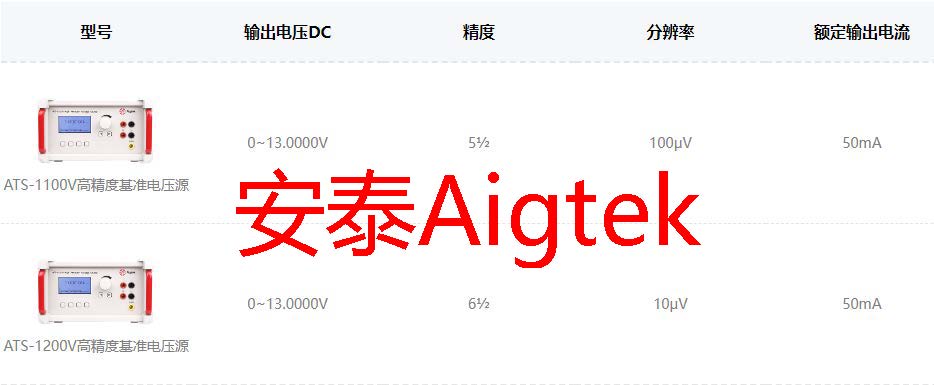
,MAC ( AURIX? ) 從未報(bào)告有效的6EDL_SPI_LINK , [GETH_MAC_PHYIF_CONTROL_STATUS.B.LNKSTS] 始終保持為 0。
通過(guò)
2024-03-06 06:31:39
激光 SLAM 任務(wù)是搭載激光雷達(dá)的主體于運(yùn)動(dòng)中估計(jì)自身的位姿,同時(shí)建立周?chē)沫h(huán)境地圖。而準(zhǔn)確的定位需要精確的地圖,精確的地圖則來(lái)自于準(zhǔn)確的定位,定位側(cè)重自身位姿估計(jì),建圖側(cè)重外部環(huán)境重建。
2024-03-04 11:25:0496 
的RTS線變?yōu)榈碗娖剑缓蟀聪虏⑨尫臨ESET按鍵,再釋放RECOVERY按鍵,就可以正常燒錄固件。
但是我自己的電路板按下RECOVERY按鍵后,HCI UART的RTS線始終保持電平,造成固件無(wú)法燒錄
2024-03-01 15:58:58
你知道激光鉆孔技術(shù)有多牛嗎?看完這篇文章你就明白了
2024-02-29 17:09:55168 自成立以來(lái),高通技術(shù)公司在5G技術(shù)領(lǐng)域始終保持著領(lǐng)先優(yōu)勢(shì)。
2024-02-26 16:39:12224 LSD-SLAM 即 Large-Scale Direct SLAM,兼容單目相機(jī)和雙目相機(jī)。LSD-SLAM是一種基于光流跟蹤的直接法SLAM,但是實(shí)現(xiàn)了半稠密建圖,建圖規(guī)模大,可以在線實(shí)時(shí)運(yùn)行。
2024-02-26 09:41:50267 
SLAM中,先驗(yàn)值通常從一系列傳感器獲得,比如慣性測(cè)量單元(IMU)和編碼器,而觀測(cè)值則是通過(guò)GPS、相機(jī)和激光雷達(dá)等其他傳感器獲取的,后驗(yàn)值是融合了先驗(yàn)信息與觀測(cè)數(shù)據(jù)之后得到的結(jié)果,它代表了根據(jù)所有已知信息計(jì)算出的最優(yōu)定位輸出。
2024-02-23 11:31:03231 
CY8C6247BZID44內(nèi)部基準(zhǔn)電壓可以設(shè)置嗎?
2024-02-01 07:18:12
CY8C6247BZID44 CapSense基準(zhǔn)線值如何轉(zhuǎn)換pF?有大概的計(jì)算公試嗎?
2024-02-01 06:13:19
基于NeRF的SLAM算法采用全局地圖和圖像重建損失函數(shù),通過(guò)可微分渲染捕獲稠密的光度信息,具有高保真度。
2024-01-26 10:48:31259 
推挽(push-pull)輸出是由兩個(gè)MOS或者三極管組成,兩個(gè)管子始終保持一個(gè)導(dǎo)通,另一個(gè)截止的狀態(tài)。
2024-01-25 15:07:20729 
是比較小的,這樣的話兩個(gè)三極管是始終保持導(dǎo)通放大的嗎?那么這兩個(gè)三極管的集電極輸出電流是什么關(guān)系?當(dāng)左邊三極管集電極輸出電流較大的時(shí)候,OC_OUT輸出一個(gè)高電平,使右下角三端穩(wěn)壓器導(dǎo)通進(jìn)而光耦導(dǎo)通,這樣
2024-01-17 20:48:03
、GNSS RTK傳感器組合和自主導(dǎo)航 SLAM 技術(shù)組成)、以計(jì)算機(jī)視覺(jué)為主的VSLAM技術(shù)、人工智能視頻分析技術(shù)和網(wǎng)絡(luò)傳輸、云平臺(tái)管控相關(guān)技術(shù)。尤其是5G應(yīng)用逐漸開(kāi)始商用,將來(lái)智能巡檢機(jī)器人借助5G
2024-01-14 21:56:23
進(jìn)行激光晶圓漂移調(diào)整,從而能夠以較低的成本提供出色的性能。AD688內(nèi)置基本基準(zhǔn)電壓源和三個(gè)附加放大器。這些放大器經(jīng)過(guò)激光調(diào)整,具有低失調(diào)和低漂移特性,并保持基準(zhǔn)
2024-01-11 15:15:59
大多同時(shí)定位于建圖(SLAM)系統(tǒng)在傳統(tǒng)上假定的都是靜態(tài)世界,這與現(xiàn)實(shí)世界的場(chǎng)景不符。
2024-01-05 13:46:49462 
近日,紫龍游戲旗下 BlackJack 工作室全新戰(zhàn)棋旗艦作品《鋼嵐》在華為游戲中心首發(fā)上線,并宣布《鋼嵐》完成鴻蒙原生應(yīng)用開(kāi)發(fā),成為基于 HarmonyOS NEXT 開(kāi)發(fā)的首款戰(zhàn)棋新游,不但
2023-12-28 10:24:08
跟蹤場(chǎng)景表示。這里也推薦工坊推出的新課程《徹底剖析室內(nèi)、室外激光SLAM關(guān)鍵算法和實(shí)戰(zhàn)(cartographer+LOAM+LIO-SAM)》。
2023-12-26 16:38:33500 
松下激光投影機(jī)采用藍(lán)色激光光源+熒光輪的技術(shù)架構(gòu),以避免三色激光在長(zhǎng)時(shí)間使用后,R/G/B三種顏色的光源衰減程度不一致,導(dǎo)致均一性下降的問(wèn)題,從而使得投影機(jī)在整個(gè)生命周期中均一性表現(xiàn)始終保持穩(wěn)定。
2023-12-21 10:42:28357 請(qǐng)問(wèn)現(xiàn)在Ad9265芯片已經(jīng)工作(處于非SPI控制模式,DCO輸出正常),但是不管怎么調(diào)節(jié)信號(hào)輸入的大小,16位中的第7位輸出始終為0,8,9,10,11位始終輸出為1…這輸出是不正常的……請(qǐng)問(wèn)出現(xiàn)這種情況的原因可能是什么?請(qǐng)專家能給我提示。謝謝
2023-12-21 07:37:42
超快激光技術(shù)及其應(yīng)用? 超快激光技術(shù)是一種非常先進(jìn)的光學(xué)技術(shù),它利用超快激光脈沖進(jìn)行高精度的物質(zhì)分析和處理。超快激光技術(shù)具有時(shí)間分辨率非常高、能量密度非常大、能夠?qū)崟r(shí)觀測(cè)分子和原子運(yùn)動(dòng)等特點(diǎn),因此在
2023-12-20 15:35:55247 ADI工程師:
您好!今天在使用模數(shù)芯片AD7490時(shí)發(fā)現(xiàn),DOUT引腳始終沒(méi)有輸出,供電電壓5V,基準(zhǔn)電壓2.5V,我都量過(guò),沒(méi)有問(wèn)題!
程序代碼如下:
//IO操作函數(shù)
AD7490數(shù)據(jù)
2023-12-18 07:03:54
1.對(duì)AD5290寫(xiě)入數(shù)據(jù)后,發(fā)現(xiàn)W對(duì)A、B的阻值在變,但過(guò)一陣時(shí)間后W位置會(huì)回到A、B的中間,不管阻值是否發(fā)生改變,A、B、W輸出電壓始終保持1.36V不變,還有芯片斷電后再重新接通電源W的位置又
2023-12-15 08:03:27
需要采集電流電壓,所以需要一個(gè)基準(zhǔn)源,選取ADR530,看了技術(shù)手冊(cè)還是不太明白,它的具體用法?希望使用過(guò)的朋友給些建議。謝謝
2023-12-13 08:10:58
:目前使用矢量控制的方法來(lái)控制永磁同步電機(jī),在速度開(kāi)環(huán)的情況下,可以給較小電流,以旋變?yōu)槲恢脗鞲衅鳎瑢?shí)時(shí)跟蹤電機(jī)的轉(zhuǎn)角反饋,讓電機(jī)以較慢的轉(zhuǎn)速運(yùn)行。故可以證明AD2S1210讀取角度是沒(méi)有問(wèn)題
2023-12-12 08:01:16
在激光技術(shù)飛速發(fā)展的時(shí)代,大族光子憑借多年來(lái)在激光熔覆技術(shù)的高功率光源中的深耕,以及在增材制造熔覆行業(yè)的沉淀和積累,積極布局推出了熔覆專用的激光器及行業(yè)解決方案,為激光制造應(yīng)用及科技進(jìn)步貢獻(xiàn)力量
2023-12-08 12:59:49194 
AD7794 內(nèi)部增益8倍,外部電壓基準(zhǔn)的時(shí)候,數(shù)據(jù)輸出很慢。這兩項(xiàng)不能同時(shí)用么?試了一下,內(nèi)部增益8倍,內(nèi)部電壓基準(zhǔn)的時(shí)候正常。內(nèi)部增益1倍,外部電壓基準(zhǔn)的時(shí)候也正常。
想確認(rèn)下,是否選用外部
2023-12-08 06:12:41
德國(guó)SHF公司具有30多年射頻器件的芯片設(shè)計(jì)、研發(fā)和生產(chǎn)經(jīng)驗(yàn),其微波器件性能始終保持著行業(yè)領(lǐng)先地位,多年來(lái)持續(xù)為市場(chǎng)提供超高帶寬、相位匹配、便攜易用的射頻器件。
2023-12-06 09:36:44339 
高效的系統(tǒng)管理員通常是懶惰的。原因不是他們沒(méi)有完成工作或浪費(fèi)時(shí)間,主要是因?yàn)樗麄円呀?jīng)自動(dòng)化了大量的日常任務(wù)。因此,不必在服務(wù)器上浪費(fèi)太多精力,可以利用時(shí)間學(xué)習(xí)新技術(shù)并始終保持 “遙遙領(lǐng)先”。
2023-12-04 14:48:56197 
在AD2S1210數(shù)據(jù)手冊(cè)中描述的基準(zhǔn)電壓源特性如下:
其輸出電流較小,僅為100uA。
設(shè)計(jì)激磁電路時(shí),使用了該參考源,但是沒(méi)有注意到這個(gè)參數(shù)。激磁正和激磁負(fù)的實(shí)際處理電路仿真
2023-12-04 06:17:50
激光熔覆技術(shù)是一種金屬表面處理技術(shù),通過(guò)使用激光束熔化金屬粉末并將其附著在金屬基底上來(lái)制造復(fù)雜的金屬零件或修復(fù)己損壞的金屬部件。
2023-12-02 09:45:34601 9176沒(méi)有輸出。寄存器0x03A,位4始終保持為0。這意味著它沒(méi)有同步。但204B鏈路已經(jīng)成功(sync等于1,F(xiàn)PGA已經(jīng)傳輸了數(shù)據(jù))。
任何人都可以幫助我 我會(huì)非常感激的!
2023-12-01 07:33:49
什么是激光雷達(dá)3DSLAM?在了解這個(gè)概念之前,我們首先需要弄懂什么是“SLAM”。SLAM,英文是SimultaneousLocalizationandMapping,意思是即時(shí)定位與建圖。通俗
2023-11-25 08:23:57998 
西門(mén)子工控機(jī)是為了適應(yīng)特殊、惡劣環(huán)境下工作的一種工業(yè)計(jì)算機(jī),它的電源、機(jī)箱、主板都是為了能適應(yīng)長(zhǎng)時(shí)間不間斷運(yùn)行而設(shè)計(jì)的。但是也并不是說(shuō)工控機(jī)適合長(zhǎng)期在高溫、高塵、高濕環(huán)境下運(yùn)行,那么高溫環(huán)境下,工控機(jī)該如何防護(hù)?本文將為您介紹一些常見(jiàn)的日常維護(hù)事項(xiàng),幫助您讓它始終保持良好的工作性能。
2023-11-23 11:03:36239 中強(qiáng)光智能自主研發(fā)的3D激光SLAM無(wú)人叉車(chē)KSRB1425由智能3D激光導(dǎo)航出發(fā),結(jié)合視覺(jué)及多項(xiàng)感知融合技術(shù),搭配先進(jìn)的演算能力,實(shí)現(xiàn)智能化精準(zhǔn)運(yùn)動(dòng)
2023-11-10 15:59:17418 。
根深葉茂,OpenHarmony四大技術(shù)架構(gòu)競(jìng)爭(zhēng)力領(lǐng)先,生態(tài)蓬勃發(fā)展
OpenHarmony以“面向萬(wàn)物智聯(lián)世界,構(gòu)建分布式全場(chǎng)景協(xié)同的開(kāi)源操作系統(tǒng)基座與生態(tài)系統(tǒng)”為技術(shù)愿景,秉持“生態(tài)統(tǒng)一
2023-11-06 14:35:46
激光清洗技術(shù)是激光技術(shù)在工程領(lǐng)域的一種成功應(yīng)用,其基本原理是利用激光能量密度高的特點(diǎn),使激光與工件基底上附著的污染物相互作用,以瞬間受熱膨脹、熔化、氣體揮發(fā)等形式與工件基底分離。激光清洗技術(shù)具有高效
2023-10-29 08:07:49883 
將始終保持穩(wěn)定狀態(tài)。具體來(lái)說(shuō),當(dāng)輸入信號(hào)移動(dòng)到同相端和反相端之間時(shí),反饋回路的電壓會(huì)減小或增大,從而調(diào)整輸出電壓來(lái)消除任何輸入電壓的影響。這就是所謂的負(fù)反饋,它可以使運(yùn)算放大器更加穩(wěn)定,減少噪聲和失真。 為什么
2023-10-26 15:57:341736 激光SLAM局部定位精度高但全局定位能力差且對(duì)環(huán)境特征不敏感,而視覺(jué)SLAM全局定位能力好但局部定位相對(duì)激光雷達(dá)較差,兩者融合可以提高SLAM系統(tǒng)的精度和魯棒性。
2023-10-23 11:01:14646 
如何減小cmos帶隙基準(zhǔn)溫度系數(shù)工藝角的影響? CMOS(Complementary Metal Oxide Semiconductor)技術(shù)是現(xiàn)代電子工業(yè)中最常用的技術(shù)之一,它具有功耗小、集成度
2023-10-23 10:29:11318 激光是20世紀(jì)以來(lái),繼原子能、計(jì)算機(jī)、半導(dǎo)體之后,人類(lèi)的又一重大發(fā)明,被稱為“最快的刀”、“最準(zhǔn)的尺”、“最亮的光”和“奇異的激光”激光技術(shù)和激光器是二十世紀(jì)六十年代出現(xiàn)的最重大的科學(xué)技術(shù)之一。由于
2023-10-10 10:02:07217 
STM8的ADC采樣可以用內(nèi)部的電壓基準(zhǔn)嗎
2023-10-10 06:44:26
STM8的低功耗模式下可以保持PWM輸出嗎
2023-10-09 07:39:49
共焦顯微鏡系統(tǒng)所展現(xiàn)的放大圖像細(xì)節(jié)要高于常規(guī)的光學(xué)顯微鏡。VT6000共聚焦激光顯微鏡技術(shù)以共聚焦技術(shù)為原理、結(jié)合精密Z向掃描模塊、3D 建模算法等對(duì)器件表面進(jìn)行非接觸式掃描并建立表面3D圖像,在
2023-09-28 09:19:04
中圖儀器SJ6000高精度激光干涉測(cè)量技術(shù)具有高精度、高靈敏度、非接觸式測(cè)量等優(yōu)點(diǎn),采用激光雙縱模熱穩(wěn)頻技術(shù),可實(shí)現(xiàn)高精度、抗擾力強(qiáng)、長(zhǎng)期穩(wěn)定性好的激光頻率輸出。結(jié)合不同的光學(xué)鏡組,可實(shí)現(xiàn)線性測(cè)長(zhǎng)
2023-09-27 11:45:06
SLAM(Simultaneous Localization and Mapping)同步定位與地圖構(gòu)建,一種同時(shí)實(shí)現(xiàn)設(shè)備自身定位和環(huán)境地圖構(gòu)建的技術(shù)。
2023-09-20 10:59:591059 
激光雷達(dá)被認(rèn)為是L3 級(jí)及以上自動(dòng)駕駛必備傳感器
當(dāng)前 L2 級(jí)自動(dòng)駕駛感知系統(tǒng)主要由超聲波雷達(dá)、毫米波雷達(dá)、攝像頭等車(chē)載傳感器組成。特斯拉環(huán)繞車(chē)身共配有8個(gè)攝像頭,視野范圍達(dá)360度,對(duì)周?chē)h(huán)境
2023-09-19 13:35:01
介紹了一種以小型PLC為控制核心的大功率半導(dǎo)體激光治療儀。該治療儀采用單管激光器光纖耦合技術(shù)設(shè)計(jì)了波長(zhǎng)為808rim、輸出功率30W 的激光器模塊,采用恒流充電技術(shù)設(shè)計(jì)了高效激光器驅(qū)動(dòng)電路,整機(jī)具有散熱好、低功耗和高可靠性等優(yōu)點(diǎn)。
2023-09-19 08:23:52
設(shè)計(jì)了半導(dǎo)體激光器恒定功率驅(qū)動(dòng)電路,采用負(fù)反饋運(yùn)算放大電路構(gòu)成恒流源,電容充放電模塊構(gòu)成穩(wěn)壓環(huán)節(jié),以高精度電流檢測(cè)芯片 MAX4008監(jiān)測(cè) PIN光電探測(cè)器探測(cè)電流,以此為基準(zhǔn),引入功率反饋環(huán)節(jié),穩(wěn)定輸出功率。闡述并分析了電路原理與實(shí)驗(yàn)結(jié)果,表明電路運(yùn)行穩(wěn)定,實(shí)現(xiàn)了精確的自動(dòng)功率控制。
2023-09-19 07:15:15
GO-SLAM主要還是基于NeRF進(jìn)行稠密重建,可以發(fā)現(xiàn)相較于NICE-SLAM這些SOTA方案,GO-SLAM重建場(chǎng)景的全局一致性更好,這主要是因?yàn)樗肓嘶丨h(huán)和全局BA來(lái)優(yōu)化累計(jì)誤差。
2023-09-11 10:03:29681 
中圖儀器SJ6000激光干涉測(cè)量技術(shù)具有測(cè)量精度高、量程大、速度快、靈敏度高、抗擾力強(qiáng)等優(yōu)點(diǎn)。在計(jì)量領(lǐng)域中可作為長(zhǎng)度基準(zhǔn)以及設(shè)備校準(zhǔn)工具。它結(jié)合不同的光學(xué)鏡組,可實(shí)現(xiàn)線性測(cè)長(zhǎng)、角度、直線度、垂直度
2023-09-05 10:45:27
近年來(lái),SLAM技術(shù)取得了驚人的發(fā)展,領(lǐng)先一步的激光SLAM已成熟的應(yīng)用于各大場(chǎng)景中,視覺(jué)SLAM雖在落地應(yīng)用上不及激光SLAM,但也是目前研究的一大熱點(diǎn),今天我們就來(lái)詳細(xì)聊聊視覺(jué)SLAM的那些事兒。
2023-09-05 09:31:111374 
激光熔覆技術(shù)是一種經(jīng)濟(jì)效益很高的新技術(shù),它可以在廉價(jià)金屬基材上制備出高性能的合金表面而不影響基體的性質(zhì),降低成本,節(jié)約貴重稀有金屬材料,因此,世界上各工業(yè)先進(jìn)國(guó)家對(duì)激光熔覆技術(shù)的研究及應(yīng)用都非常重視
2023-09-04 16:09:52393 電壓表的結(jié)構(gòu)使其內(nèi)阻始終保持高。如果它與電路串聯(lián),則由于測(cè)量電壓而流過(guò)的電流最小化。因此,干擾電壓表的讀數(shù)。
電壓表始終與電路并聯(lián)連接,以便電路上出現(xiàn)相同的壓降。電壓表的高電阻與其所連接
2023-09-01 16:39:07
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有舉足輕重的地位。下面的表格是近年來(lái)LOAM系列算法的匯總。
2023-08-31 15:54:21355 
芯片,已經(jīng)成為企業(yè)在5G領(lǐng)域中主導(dǎo)地位的重要原因之一。 華為5G芯片的研發(fā)歷程 華為在5G芯片的研發(fā)方面始終保持了領(lǐng)先的態(tài)勢(shì)。自2013年起,華為5G芯片的研發(fā)計(jì)劃就已經(jīng)開(kāi)始,系統(tǒng)性推進(jìn)了5G芯片的技術(shù)突破和產(chǎn)業(yè)生態(tài)的構(gòu)建。經(jīng)過(guò)多年的技術(shù)積累和不
2023-08-31 09:40:294102 在實(shí)驗(yàn)中,hdl_graph_slam和BLAM在所有數(shù)據(jù)集上的性能均不理想,因而下面不再討論。而SC-LeGo-LOAM的性能較之LeGo-LOAM也沒(méi)有明顯改善,因而下面也不再討論。
2023-08-28 11:47:39366 
3D激光SLAM中所用的一般是多線激光雷達(dá),每一個(gè)數(shù)據(jù)幀中的點(diǎn)云數(shù)量非常的多。像KITTI數(shù)據(jù)集中所用的Velodyne 16線激光雷達(dá),一般點(diǎn)云數(shù)在幾萬(wàn)。而Velodyne 64線激光雷達(dá)點(diǎn)云數(shù)量更是多達(dá)十幾萬(wàn)。這個(gè)數(shù)量太過(guò)龐大,如果每一個(gè)點(diǎn)都參與運(yùn)算,那么對(duì)計(jì)算資源的需求將是不能接受的。
2023-08-28 10:12:50477 
激光跟蹤儀是一種常用于工業(yè)領(lǐng)域的高精度測(cè)量工具,其測(cè)量精度由基準(zhǔn)面的選擇直接影響。因此,在進(jìn)行尺寸測(cè)量時(shí),選擇合適的基準(zhǔn)面是非常關(guān)鍵的。激光跟蹤儀選擇基準(zhǔn)面的要求1、基準(zhǔn)面應(yīng)該盡可能平整,不得
2023-08-23 17:29:10584 
上周的組會(huì)上,我給研一的萌新們講解什么是SLAM,為了能讓他們?cè)跊](méi)有任何基礎(chǔ)的情況下大致聽(tīng)懂,PPT只能多圖少字沒(méi)公式,這里我就把上周的組會(huì)匯報(bào)總結(jié)一下。 這次匯報(bào)的題目我定為“視覺(jué)SLAM:一直在
2023-08-21 10:02:071568 
激光雷達(dá)是最古老,研究也最多的SLAM傳感器。它們提供機(jī)器人本體與周?chē)h(huán)境障礙物間的距離信息。常見(jiàn)的激光雷達(dá),例如SICK、Velodyne還有我們國(guó)產(chǎn)的rplidar等,都可以拿來(lái)做SLAM。激光雷達(dá)能以很高精度測(cè)出機(jī)器人周?chē)系K點(diǎn)的角度和距離,從而很方便地實(shí)現(xiàn)SLAM、避障等功能。
2023-08-16 10:31:081895 
(CHIRI)中界定的能力。Armv8-A結(jié)構(gòu)配置將能力引入Armv8-A 系統(tǒng)原型開(kāi)發(fā)平臺(tái),作為Armv8 AArch64 State(S)的擴(kuò)展版SDP原型開(kāi)發(fā)平臺(tái)。 CHIR-S指令配置原則為精細(xì)調(diào)
2023-08-12 07:25:49
SLAM至今已歷經(jīng)三十多年的研究,這里給出經(jīng)典視覺(jué)SLAM框架,這個(gè)框架本身及其包含的算法已經(jīng)基本定型,并且已經(jīng)在許多視覺(jué)程序庫(kù)和機(jī)器人程序庫(kù)中提供。
2023-08-10 14:15:53410 
鋰電池的生產(chǎn)迭代已經(jīng)給激光設(shè)備帶來(lái)了明確的“增量”機(jī)會(huì),能夠抓住技術(shù)領(lǐng)先的時(shí)間窗口,以激光創(chuàng)新工藝技術(shù)與現(xiàn)有所需設(shè)備進(jìn)行耦合,將形成鋰電智能裝備企業(yè)新的價(jià)值來(lái)源。
2023-08-09 10:17:27818 
正如圖中所示,機(jī)器人自主定位導(dǎo)航技術(shù)中包括:定位和地圖創(chuàng)建(SLAM)與路徑規(guī)劃和運(yùn)動(dòng)控制兩個(gè)部分,而SLAM本身只是完成機(jī)器人的定位和地圖創(chuàng)建,二者有所區(qū)別。
2023-08-03 11:12:00697 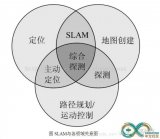
融合。 ? 作為AR和計(jì)算機(jī)視覺(jué)領(lǐng)域的領(lǐng)先企業(yè),谷東科技受邀參與本次技術(shù)了論壇,與業(yè)內(nèi)專家和學(xué)者進(jìn)行深入的交流和探討,共同探索SLAM技術(shù)在現(xiàn)實(shí)世界中的發(fā)展和應(yīng)用前景。我們分享了在SLAM技術(shù)方面的最新成果和經(jīng)驗(yàn),包括基于深度學(xué)習(xí)的實(shí)時(shí)地圖構(gòu)
2023-08-01 09:37:23525 電子設(shè)備必須能夠?qū)⒄鎸?shí)世界的測(cè)量結(jié)果(速度、壓力、長(zhǎng)度、溫度)映射到電子世界中的可測(cè)的量(電壓)。當(dāng)然,要測(cè)量電壓,您需要一個(gè)衡量標(biāo)準(zhǔn),該標(biāo)準(zhǔn)就是基準(zhǔn)電壓。對(duì)系統(tǒng)設(shè)計(jì)人員而言,問(wèn)題不在于是否需要基準(zhǔn)
2023-07-17 11:40:001247 
所謂AGV,是Automated Guided Vehicle的縮寫(xiě),意即"自動(dòng)導(dǎo)引運(yùn)輸車(chē)"。
2023-07-11 09:36:42783 激光器、半導(dǎo)體激光器、光纖激光器、碟片激光器等多種品類(lèi),每種激光器都在自身技術(shù)、性能方面不斷發(fā)展創(chuàng)新,在能量、光束質(zhì)量和穩(wěn)定性等方面,始終在向著更高的臺(tái)階邁進(jìn)。在繼
2023-07-07 12:00:10581 對(duì)于學(xué)術(shù)研究而言,LeGo-LOAM是激光SLAM的經(jīng)典框架,LeGo-LOAM源碼簡(jiǎn)潔清晰,比LOAM算法的代碼可讀性要高很多。近幾年各頂會(huì)上的很多SLAM算法設(shè)計(jì)思想都潛移默化地受LeGo-LOAM的影響,對(duì)其的改進(jìn)思路相較于LOAM也比較多樣化。
2023-07-03 10:47:08415 
激光SLAM很多人都覺(jué)得很難,對(duì)于初學(xué)者更是不知道從哪里開(kāi)始學(xué)起,怎樣才能更高效的學(xué)習(xí),進(jìn)入相關(guān)企業(yè)需要達(dá)到什么樣的要求,這也是很多初學(xué)者面臨的難題。如果掌握了3D激光SLAM的核心技術(shù)原理,編程
2023-06-29 15:28:55337 
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有舉足輕重的地位。
2023-06-28 09:25:15387 
調(diào)整,從而能夠提供出色的性能。AD588內(nèi)置基本基準(zhǔn)電壓源和三個(gè)附加放大器,可提供引腳可編程的輸出范圍。這些放大器經(jīng)過(guò)激光調(diào)整,具有低失調(diào)和低漂移特性,以保持基準(zhǔn)
2023-06-27 09:19:02
激光晶圓漂移調(diào)整,從而能夠以較低的成本提供出色的性能。AD688內(nèi)置基本基準(zhǔn)電壓源和三個(gè)附加放大器。這些放大器經(jīng)過(guò)激光調(diào)整,具有低失調(diào)和低漂移特性,并保持基準(zhǔn)電壓
2023-06-26 17:49:25
法雷奧始終恪守承諾,受到全球客戶的認(rèn)可。2023年5月,法雷奧宣布其最新一代激光雷達(dá)SCALA 3在過(guò)去18個(gè)月的訂單價(jià)值超過(guò)10億歐元。法雷奧作為高級(jí)駕駛輔助系統(tǒng)(ADAS)領(lǐng)域的全球領(lǐng)導(dǎo)者,是第一家對(duì)L3級(jí)自動(dòng)駕駛系統(tǒng)的激光雷達(dá)和感知軟件實(shí)現(xiàn)量產(chǎn)的企業(yè),目前仍然保持領(lǐng)先地位。
2023-06-25 15:03:13644 
激光熔覆是一種表面改性技術(shù),又稱激光熔覆或激光熔覆,以高能激光為熱源,合金粉末為焊接材料,通過(guò)激光與合金粉末同步作用于金屬表面,迅速熔化形成熔池,然后迅速凝固形成致密、均勻、厚度可控的冶金結(jié)合
2023-06-19 13:59:42317 
與ORB-SLAM2相比,ORB-SLAM3在處理大視差和長(zhǎng)時(shí)間未觀測(cè)到的場(chǎng)景時(shí)效果更好。它還提供了更準(zhǔn)確的幀間運(yùn)動(dòng)估計(jì)和更快的處理速度。
2023-06-19 09:28:121961 
電子發(fā)燒友網(wǎng)站提供《使用Bittle和Raspberry Pi 4的ROS SLAM.zip》資料免費(fèi)下載
2023-06-14 15:23:22 0
0 二十余年來(lái),同時(shí)定位與建圖(Simultaneous LocalizationAnd Mapping,SLAM)在移動(dòng)機(jī)器人技術(shù)社區(qū)中一直是一個(gè)非常受歡迎
的話題。SLAM有很多應(yīng)用,例如空間探索
2023-06-02 14:25:222 我的 ISP 需要登錄 ID 和密碼才能訪問(wèn)互聯(lián)網(wǎng)。該網(wǎng)頁(yè)應(yīng)始終保持打開(kāi)狀態(tài),否則它會(huì)提示我再次登錄,這在移動(dòng)設(shè)備上使用時(shí)真的很痛苦,因?yàn)樗恢痹谧N(xiāo)。我正在考慮用 ESP8266-7
2023-05-24 07:49:27
很多同學(xué)都覺(jué)得Slam方向難以入門(mén),也難以學(xué)深。但其實(shí)相對(duì)來(lái)講,不像其他很多方向,很多的東西大家都已經(jīng)做了,并且做的很不錯(cuò),要想發(fā)論文或者找創(chuàng)意突破比較吃力。slam方向還有很多深層次的多領(lǐng)域結(jié)合應(yīng)用的內(nèi)容還比較少,并且slam更深的內(nèi)容還有很多東西需要做。
2023-05-09 14:25:14638 
中國(guó)最大測(cè)繪地信展會(huì),其域創(chuàng)新重新定義手持激光雷達(dá)、手持SLAM設(shè)備。
2023-04-27 12:26:50927 
的模擬信號(hào),因此必須使用高性能ADC和DAC。在惡劣的數(shù)字環(huán)境內(nèi),能否保持寬動(dòng)態(tài)范圍和低噪聲與采用良好的高速電路設(shè)計(jì)技術(shù)密切相關(guān)。包括適當(dāng)?shù)男盘?hào)布線,去耦和接地。 過(guò)去,一般認(rèn)為“高精度,低速”電路
2023-04-19 16:31:04
電阻值為576Ω時(shí),基準(zhǔn)電壓源將在4.16V至12.75V的輸入電壓范圍內(nèi)保持在其工作區(qū)域內(nèi)。壓差為64mV,具有超過(guò)12V的完整基準(zhǔn)功能。為了比較并聯(lián)基準(zhǔn)低壓差與具有相同4.096V基準(zhǔn)電壓的串聯(lián)基準(zhǔn)電壓,數(shù)據(jù)手冊(cè)中規(guī)定REF5040的最大壓差為200mV。
2023-04-11 09:22:22856 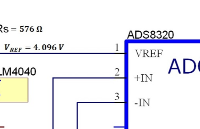
μA。 如果外部電阻的值為576Ω,則基準(zhǔn)電壓源在4.16V~12.75V輸入電壓范圍內(nèi)保持在工作區(qū)域內(nèi)。 這是64mV壓差,在高于12V的電壓下可完美用作基準(zhǔn)電壓源。 為了將并聯(lián)基準(zhǔn)電壓源的低壓
2023-04-10 10:50:311097 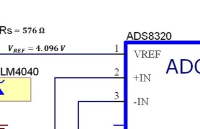
我有一個(gè)連接到外圍設(shè)備的使能引腳,我想在正常模式和掛起模式下保持高電平($systemctl suspend)。 在 DTS 中:IMX8QM_LVDS0_GPIO01_LSIO_GPIO1_IO05 0x00000061您知道如何配置此引腳以在掛起模式下保持其值嗎?
2023-04-03 07:16:01
繼電器是一種電控制器件,可以給予規(guī)定輸入量并保持足夠長(zhǎng)的時(shí)間,在電氣輸出電路中使被控量發(fā)生預(yù)定的階躍變化。當(dāng)輸入量降至一定程度并保持足夠長(zhǎng)的時(shí)間后,再恢復(fù)到初始狀態(tài)。下面介紹激光焊接技術(shù)在焊接繼電器的應(yīng)用優(yōu)點(diǎn)。
2023-03-29 13:27:27376 一般將使用單線雷達(dá)建構(gòu)二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數(shù)據(jù)和運(yùn)動(dòng)都限制在2D平面內(nèi)且運(yùn)動(dòng)平面與激光掃描平面平行。
2023-03-27 11:06:561384 激光雷達(dá)分單線和多線這兩大類(lèi),針對(duì)這兩類(lèi)Lidar所使用的算法也不盡相同。 首先單線雷達(dá)一般應(yīng)用在平面運(yùn)動(dòng)場(chǎng)景,多線雷達(dá)則可以應(yīng)用于三維運(yùn)動(dòng)場(chǎng)景。
2023-03-27 11:02:181901 (Localization),建圖(Mapping)和路徑規(guī)劃(Navigation)。由于其重要的理論與應(yīng)用價(jià)值,被很多學(xué)者認(rèn)為是實(shí)現(xiàn)真正全自主移動(dòng)機(jī)器人的關(guān)鍵。目前,SLAM技術(shù)被廣泛運(yùn)用于機(jī)器人、無(wú)人機(jī)、無(wú)人駕駛、AR、VR等領(lǐng)域。
2023-03-24 11:10:52843
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論