視覺傳感器在大多數(shù)紋理豐富的場(chǎng)景中效果很好,但是遇到玻璃或白墻這樣特征少的場(chǎng)景就很難有效工作了。盡管如此相機(jī)數(shù)據(jù)的優(yōu)點(diǎn)在于數(shù)據(jù)基本不會(huì)有漂移。
2024-03-18 11:31:18 70
70 
智能工業(yè)相機(jī)中網(wǎng)絡(luò)通信裝置起什么作用?
網(wǎng)絡(luò)通信裝置是智能相機(jī)的重要組成部分,主要完成控制信息、圖像數(shù)據(jù)的通信任務(wù)。智能相機(jī)一般均內(nèi)置以太網(wǎng)通信裝置,并支持多種標(biāo)準(zhǔn)網(wǎng)絡(luò)和總線協(xié)議,從而使多臺(tái)智能相機(jī)構(gòu)成更大的機(jī)器視覺系統(tǒng)。
2024-03-15 10:57:2250 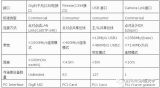
Intewell操作系統(tǒng)運(yùn)動(dòng)控制解決方案,采用Windows或者Linux實(shí)時(shí)擴(kuò)展架構(gòu),滿足在Windows系統(tǒng)或者Linux系統(tǒng)處理機(jī)器視覺的需求,利用Intewell的高實(shí)時(shí)性,部署EtherCAT主站,實(shí)現(xiàn)對(duì)伺服軸的實(shí)時(shí)控制,滿足了機(jī)器視覺和運(yùn)動(dòng)控制相結(jié)合的需求,如下場(chǎng)景案例。
2024-03-13 16:12:36133 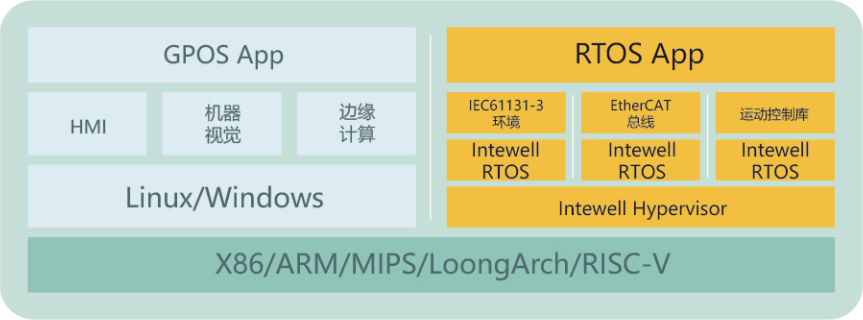
相機(jī)組件支持相機(jī)業(yè)務(wù)的開發(fā),開發(fā)者可以通過已開放的接口實(shí)現(xiàn)相機(jī)硬件的訪問、操作和新功能開發(fā),最常見的操作如:預(yù)覽、拍照和錄像等。
2024-03-08 16:20:24117 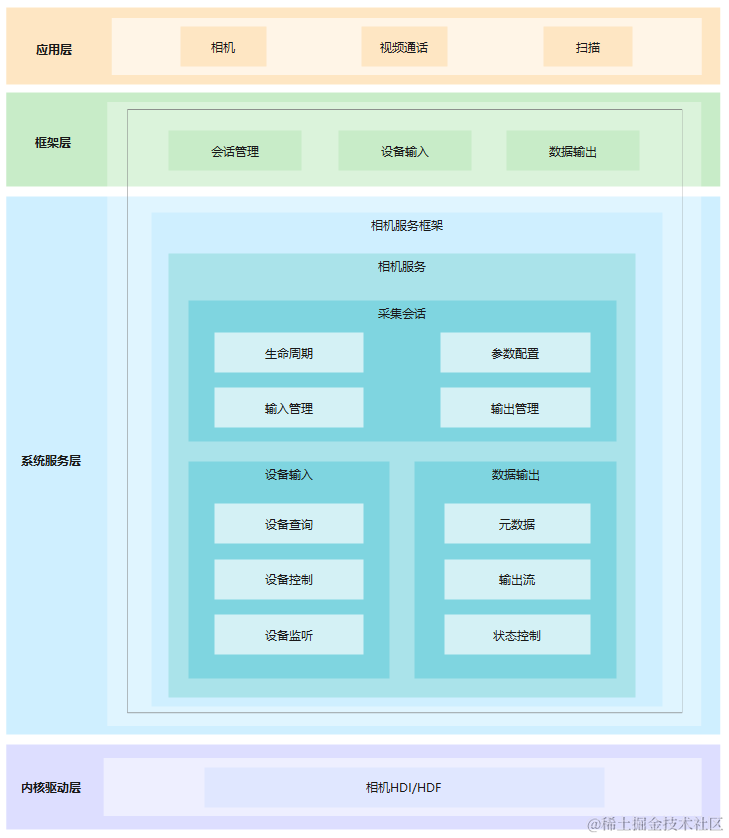
作臺(tái),通過機(jī)器視覺對(duì)電池串進(jìn)行整版定位糾偏操作,保證焊接的準(zhǔn)確性。隨后,通過焊接帶(匯流帶)將這些電池串相互連接,在這步驟中,焊槍分別在電池串兩側(cè)延伸末端的方向進(jìn)行焊接,實(shí)現(xiàn)電池串之間的電流匯集,形成完整
2024-02-28 15:01:45
工業(yè)相機(jī)丟幀怎么辦
2024-01-16 15:39:07209 
視覺定位應(yīng)用主要是找到物體的位置,那么怎么找?在這里一個(gè)重要的步驟就是標(biāo)定,標(biāo)定是把相機(jī)的像素坐標(biāo)系轉(zhuǎn)換為機(jī)械上的物理坐標(biāo)系,使得圖像中的識(shí)別的像素值轉(zhuǎn)換為機(jī)械坐標(biāo)值后發(fā)送給機(jī)械運(yùn)動(dòng),找到目標(biāo)位置。
2024-01-08 15:43:28348 
視覺相機(jī)是機(jī)器智能/自動(dòng)化的關(guān)鍵,NVIDIA Jetson支持多個(gè)合作伙伴的Camera,這些相機(jī)包括USB、以太網(wǎng)、MIPI等接口的相機(jī)。
2024-01-04 09:51:36918 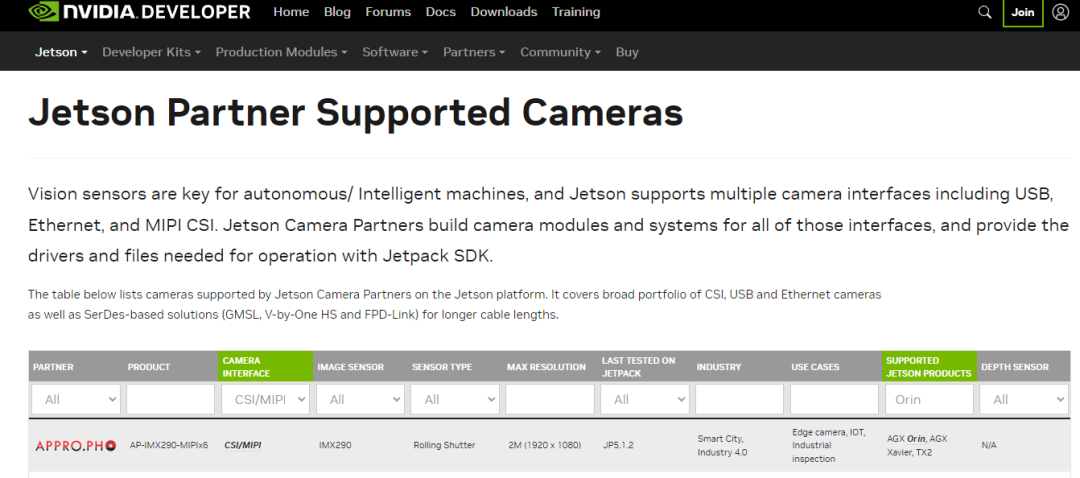
工業(yè)相機(jī)是機(jī)器視覺系統(tǒng)中的一個(gè)關(guān)鍵組件,其最本質(zhì)的功能就是將光信號(hào)轉(zhuǎn)變成有序的電信號(hào)。相比于傳統(tǒng)的民用相機(jī)(攝像機(jī))而言,它具有高的圖像穩(wěn)定性、高傳輸能力和高抗干擾能力等。鏡頭的基本功能就是實(shí)現(xiàn)光束
2023-12-28 09:53:21423 
顛覆傳統(tǒng)工藝:全景解讀正運(yùn)動(dòng)皮帶線喇叭跟隨視覺點(diǎn)膠解決方案。
2023-12-21 10:13:35234 
線掃相機(jī)是一種常見的工業(yè)視覺設(shè)備,通常用于快速捕捉運(yùn)動(dòng)物體的圖像。與常規(guī)相機(jī)不同的是,線掃相機(jī)使用一個(gè)相對(duì)較短的曝光時(shí)間和一個(gè)類似掃描的技術(shù)來捕捉整個(gè)圖像。這種掃描方式可以幫助減少運(yùn)動(dòng)物體的模糊并提
2023-12-15 10:34:521101 工業(yè)相機(jī)是機(jī)器視覺系統(tǒng)必不可少的核心組件,根據(jù)不同的類別有不同的分類標(biāo)準(zhǔn)。按傳感器的結(jié)構(gòu)特性分類,可分為面陣相機(jī)與線陣相機(jī)兩種。
2023-12-14 18:19:32570 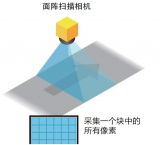
工業(yè)相機(jī)是機(jī)器視覺系統(tǒng)必不可少的核心組件,根據(jù)不同的類別有不同的分類標(biāo)準(zhǔn)。按傳感器的結(jié)構(gòu)特性分類,可分為面陣相機(jī)與線陣相機(jī)兩種。
2023-12-14 18:10:13579 工業(yè)相機(jī)是機(jī)器視覺系統(tǒng)必不可少的核心組件,根據(jù)不同的類別有不同的分類標(biāo)準(zhǔn)。按傳感器的結(jié)構(gòu)特性分類,可分為面陣相機(jī)與線陣相機(jī)兩種。其中,面陣相機(jī)是以面為單位來進(jìn)行圖像采集,可以一次性獲取完整的目標(biāo)圖像,并能及時(shí)進(jìn)行圖像采集的相機(jī)。在目標(biāo)物體的形狀、尺寸,位置等方面的應(yīng)用上發(fā)揮著至關(guān)重要的成像作用。
2023-12-14 16:55:00388 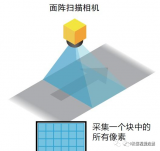
成像不清晰等問題,導(dǎo)致檢出率無法達(dá)到理想值。為解決此類問題,志強(qiáng)視覺積極學(xué)習(xí)國(guó)外先進(jìn)技術(shù),引進(jìn)了雙相機(jī)道路檢測(cè)方案。 雙相機(jī)道路檢測(cè)方案,是由兩
2023-12-14 11:40:57
線掃相機(jī)作為一種廣泛應(yīng)用于機(jī)器視覺和圖像處理的設(shè)備,其工作原理對(duì)于了解其性能和應(yīng)用具有重要意義。本文將詳細(xì)介紹線掃相機(jī)的原理、結(jié)構(gòu)、功能以及應(yīng)用。 一、線掃相機(jī)的基本原理 線掃相機(jī)的基本原理
2023-12-13 11:16:301051 轉(zhuǎn)換器件,它可以捕捉光線,將其轉(zhuǎn)化為電荷信號(hào),進(jìn)而轉(zhuǎn)化為數(shù)字圖像。 與傳統(tǒng)的膠片相機(jī)相比,CCD相機(jī)具有許多優(yōu)點(diǎn)。首先,CCD相機(jī)可以即時(shí)查看和預(yù)覽照片,無需等待膠片沖洗和照片印刷。這樣可以節(jié)省時(shí)間并提高工作效率。其次,CCD相機(jī)可以通過連接電腦或其他設(shè)備進(jìn)行圖
2023-12-11 11:26:201057 在以往的機(jī)器視覺領(lǐng)域通常是指2D的視覺系統(tǒng)即通過攝像頭拍到一個(gè)平面的照片然后通過圖像分析或比對(duì)來識(shí)別物體,從而應(yīng)用缺陷、瑕疵,位置、OCR,條形碼等。
2023-11-30 14:42:56521 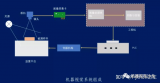
面陣相機(jī)機(jī)器視覺應(yīng)用更加廣泛。面陣CCD的優(yōu)點(diǎn)是可以直接獲取二維圖像信息,測(cè)量圖像直觀。可以短時(shí)曝光,利于搶拍動(dòng)態(tài)景物,也可以拍靜態(tài)景物。由于我平時(shí)使用的基本都是面陣相機(jī),所以這里主要介紹面陣相機(jī)的選型。
2023-11-20 14:35:01682 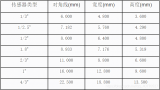
(EVS)。這兩款專為工業(yè)設(shè)備設(shè)計(jì)的傳感器實(shí)現(xiàn)了業(yè)界最小(相比其它堆疊式基于事件的視覺傳感器)的4.86 μm像素尺寸,并且只有在感知到場(chǎng)景變化時(shí)才會(huì)進(jìn)行捕捉記錄。 ? 01 事件相機(jī)概述 ? 傳統(tǒng)基于幀的圖像傳感器輸出和基于事件的視覺傳感器輸出對(duì)比 基于事件的相機(jī)是一種生物啟發(fā)的新型視覺傳感器,可實(shí)
2023-11-16 10:12:55825 
本次的深圳慕尼黑華南電子展正運(yùn)動(dòng)技術(shù)將攜高速視覺篩選機(jī)PCIe實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1028亮相。此外,我們還為您準(zhǔn)備了的新互動(dòng)模式,您將有機(jī)會(huì)贏得超值禮品!
2023-11-06 16:00:31235 
運(yùn)動(dòng)+相機(jī)? 近年來,隨著極限運(yùn)動(dòng)和和戶外冒險(xiǎn)活動(dòng)的普及,越來越多的人期望捕捉這些活動(dòng)中的精彩瞬間。運(yùn)動(dòng)相機(jī),憑借其小巧的身材、出色的防水性能和強(qiáng)大的攝像功能,已經(jīng)成為了戶外活動(dòng)愛好者、極限運(yùn)動(dòng)
2023-10-27 19:55:02434 
這個(gè)逼近的過程就是「相機(jī)標(biāo)定」,我們用簡(jiǎn)單的數(shù)學(xué)模型來表達(dá)復(fù)雜的成像過程,并且求出成像的反過程。標(biāo)定之后的相機(jī),可以進(jìn)行三維場(chǎng)景的重建,即深度的感知,這是計(jì)算機(jī)視覺的一大分支。
2023-10-18 17:00:07474 
報(bào)名地址點(diǎn)擊報(bào)名
直播簡(jiǎn)介
1.了解機(jī)械手視覺引導(dǎo)的應(yīng)用場(chǎng)景
2.了解scara機(jī)器人運(yùn)動(dòng)學(xué)正逆解
3.了解相機(jī)畸變矯正方法
4.了解手眼標(biāo)定-9點(diǎn)標(biāo)定方法
5.了解機(jī)械手旋轉(zhuǎn)中心標(biāo)定方法
6.了解
2023-10-17 15:37:40
電子發(fā)燒友網(wǎng)站提供《基于FPGA+DSP模式的智能相機(jī)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-08 10:37:16 0
0 電子發(fā)燒友網(wǎng)站提供《集成機(jī)器視覺與運(yùn)動(dòng)控制的高速工業(yè)自動(dòng)化應(yīng)用.pdf》資料免費(fèi)下載
2023-10-07 16:38:401 大多數(shù)的機(jī)器視覺系統(tǒng)的用戶認(rèn)識(shí)到相機(jī)是系統(tǒng)的關(guān)鍵要素,經(jīng)常把它當(dāng)作視覺系統(tǒng)的“芯片”。相機(jī)本身是一個(gè)復(fù)雜的系統(tǒng):包括鏡頭、信號(hào)處理器、通訊接口,以及最核心的部分——把光子轉(zhuǎn)換成電子的器件:圖像傳感器。鏡頭和其它的部件共同配合來支持相機(jī)的功能,傳感器最終決定相機(jī)的最高性能。
2023-09-22 11:19:15298 在機(jī)器視覺檢測(cè)系統(tǒng)工作流程中,主要分為圖像信息獲取、圖像信息處理和機(jī)電系統(tǒng)執(zhí)行檢測(cè)結(jié)果3個(gè)部分,另外根據(jù)系統(tǒng)需要還可以實(shí)時(shí)地通過人機(jī)界面進(jìn)行參數(shù)設(shè)置和調(diào)整。
當(dāng)被檢測(cè)的對(duì)象運(yùn)動(dòng)到某一設(shè)定時(shí)會(huì)被傳感器
2023-09-19 06:34:07
電子發(fā)燒友網(wǎng)站提供《采用InFO封裝的新型UltraScale+器件支持緊湊型工業(yè)相機(jī).pdf》資料免費(fèi)下載
2023-09-13 15:09:490 工業(yè)相機(jī)丟幀問題是工業(yè)相機(jī)常出現(xiàn)的問題,其原因與相機(jī)的傳輸接口沒有太大的關(guān)系,主要在于工業(yè)相機(jī)硬件和設(shè)計(jì)不良的驅(qū)動(dòng)程序有關(guān),這種情況對(duì)于機(jī)器視覺檢測(cè)來說,具有很不確定性的效果影響。
2023-09-13 14:44:581065 
工業(yè)攝像頭的丟幀現(xiàn)象之所以會(huì)發(fā)生,其實(shí)就是資料通道的堵塞,無法技術(shù)處理,所以新的圖像采集進(jìn)來時(shí),前一張圖像可能會(huì)被迫丟棄,或者是新的圖像被迫丟棄。一、丟幀表現(xiàn)1、工業(yè)相機(jī)預(yù)覽模式下,無法以滿幀的速度
2023-09-11 08:08:45440 
IMU測(cè)量可以提高視覺SLAM在某些復(fù)雜場(chǎng)景的魯棒性,在于相機(jī)快速運(yùn)動(dòng)、動(dòng)態(tài)障礙物、光線明暗變化明顯、環(huán)境中紋理缺失等導(dǎo)致圖像信息質(zhì)量較差的情況下,利用IMU信息仍能得到有效的定位結(jié)果。
2023-09-07 16:57:061095 
一個(gè)面陣視覺系統(tǒng)的配置選型是按照這樣的順序進(jìn)行的:相機(jī)+采集卡->鏡頭->光源。線陣視覺系統(tǒng)也類似,首先根據(jù)系統(tǒng)的檢測(cè)精度和速度要求,確定線陣 CCD 相機(jī)分辨率和行掃描速度,同時(shí)確定對(duì)應(yīng)的采集卡。
2023-09-01 10:44:12293 超高速視覺篩選機(jī)PCIe實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1028
2023-08-22 09:31:24508 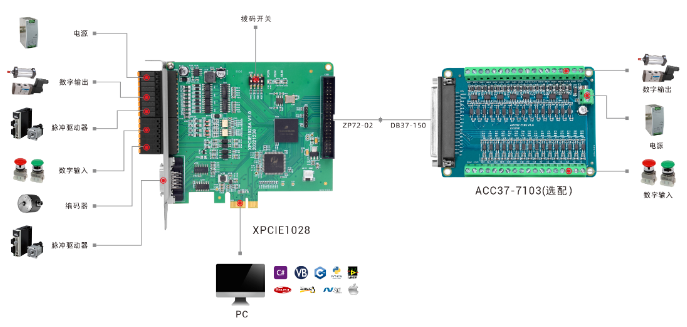
線陣相機(jī)是機(jī)器視覺領(lǐng)域中一種特殊的圖像采集設(shè)備。由于它的傳感器只有一行感光元件,因此可以實(shí)現(xiàn)高掃描頻率和高分辨率。面陣相機(jī)在采集運(yùn)動(dòng)物體照片時(shí)會(huì)產(chǎn)生模糊圖像,而線陣相機(jī)卻很好的避免了這種情況
2023-08-21 11:08:25782 
要回答這個(gè)問題,我們可以分解一下機(jī)器視覺系統(tǒng),來逐個(gè)分析。一套最簡(jiǎn)單的機(jī)器視覺系統(tǒng)包括:視覺成像部分;圖像處理部分;運(yùn)動(dòng)控制部分。1.視覺成像部分視覺成像又包含幾個(gè)典型組件:光源,鏡頭,工業(yè)相機(jī)
2023-08-21 08:08:58655 機(jī)器視覺系統(tǒng)分別有以下配件組成:
1.相機(jī):黑白智能相機(jī)、線掃描智能相機(jī)、彩色智能相機(jī)、CMOS智能相機(jī)、讀碼器等;
2.板 卡:黑白圖像采集卡、圖象壓縮/解壓板卡、彩色采集卡、1394接口板卡、圖象處理板卡等;
3.軟 件 包:圖象處理軟件、機(jī)器視覺工具軟件;
2023-08-03 10:19:37483 近日,由廣汽人工智能首席科學(xué)家陳學(xué)文領(lǐng)銜的純視覺智駕全棧自研X Lab團(tuán)隊(duì),在國(guó)際權(quán)威的Argoverse 2運(yùn)動(dòng)預(yù)測(cè)挑戰(zhàn)賽中,依靠自主研發(fā)的運(yùn)動(dòng)軌跡預(yù)測(cè)框架XPredFormer,斬獲運(yùn)動(dòng)軌跡預(yù)測(cè)
2023-08-02 14:16:391129 RTFuse是針對(duì)正運(yùn)動(dòng)技術(shù)的VPLC系列機(jī)器視覺與運(yùn)動(dòng)控制一體機(jī)開發(fā)的一款快組態(tài)軟件,可快速搭建機(jī)器視覺運(yùn)動(dòng)控制應(yīng)用系統(tǒng),主要面向以低代碼、易操作、易維護(hù)、開放組態(tài)的方式用戶群體。
2023-07-29 09:20:30409 
8寸透明屏是一種具有透明度高、顯示效果好等特點(diǎn)的新型顯示屏技術(shù)。它在智能手機(jī)、平板電腦、電視等電子產(chǎn)品中得到了廣泛應(yīng)用,給用戶帶來更好的視覺體驗(yàn)和操作體驗(yàn)。隨著技術(shù)的不斷進(jìn)步,相信透明屏將會(huì)在未來的電子產(chǎn)品中發(fā)揮更加重要的作用。
2023-07-25 13:45:38217 
電子發(fā)燒友網(wǎng)站提供《Pericom 32 khz XO驅(qū)動(dòng)2-ICs運(yùn)動(dòng)相機(jī)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-07-24 09:50:450 在圖像測(cè)量過程以及機(jī)器視覺應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系,必須建立相機(jī)成像的幾何模型,這些幾何模型參數(shù)就是相機(jī)參數(shù)。
2023-07-21 12:51:511095 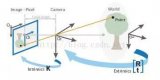
簡(jiǎn)化視覺+運(yùn)動(dòng)控制開發(fā)流程,助力高效生產(chǎn),快速點(diǎn)擊了解!
2023-07-21 10:04:56392 
摘要:針對(duì)復(fù)雜環(huán)境下人臉圖像美感分類準(zhǔn)確率低的問題,給出一種適用于人臉圖像美感分類的網(wǎng)絡(luò)模型F-Net。該模型以LeNet-5為基礎(chǔ)網(wǎng)絡(luò),使用卷積層提取復(fù)雜背景下的人臉圖像特征,優(yōu)化網(wǎng)絡(luò)模型
2023-07-19 14:38:250 一個(gè)典型的機(jī)器視覺系統(tǒng),一般包括:光源、鏡頭、相機(jī)、視覺控制系統(tǒng)(視覺處理分析軟件及視覺控制器硬件)等。其中,光源及光源控制器、鏡頭、相機(jī)等硬件部分負(fù)責(zé)成像功能,視覺控制系統(tǒng)負(fù)責(zé)對(duì)成像結(jié)果進(jìn)行處理分析、輸出分析結(jié)果至智能設(shè)備的其他執(zhí)行機(jī)構(gòu)。
2023-07-17 15:52:221005 
6自由度視覺定位是在給定先驗(yàn)三維地圖和查詢圖像的情況下估計(jì)相機(jī)絕對(duì)姿態(tài)的任務(wù)。這是一個(gè)具有挑戰(zhàn)性的研究問題,特別是對(duì)于自動(dòng)駕駛車輛的長(zhǎng)期和連續(xù)運(yùn)行,因?yàn)榕c數(shù)據(jù)庫(kù)圖像相比,查詢圖像可能會(huì)發(fā)生顯著的外觀和視角變化。
2023-07-17 14:30:01280 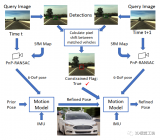
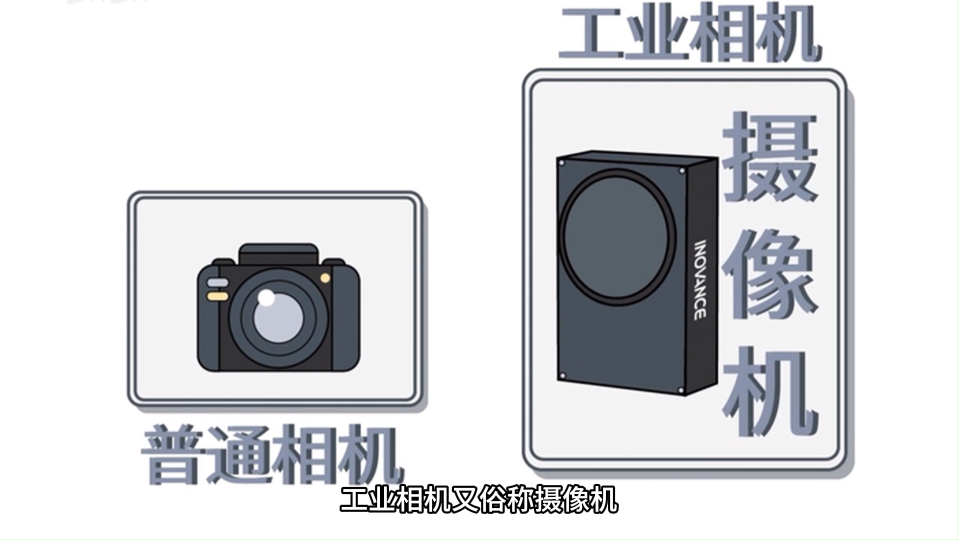
工業(yè)相機(jī)又稱攝像機(jī),相比于傳統(tǒng)的民用相機(jī)(攝像機(jī))而言,它具有高的圖像穩(wěn)定性、高傳輸能力和高抗干擾能力等,目前市面上的工業(yè)相機(jī)大多是基于CCD(Charge CoupledDevice)或CMOS(Complementary MetalOxide Semiconductor)芯片的相機(jī)。
2023-07-17 11:44:44788 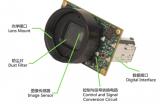
工業(yè)相機(jī)是機(jī)器視覺系統(tǒng)中的一個(gè)關(guān)鍵組件,其最本質(zhì)的功能就是將光信號(hào)轉(zhuǎn)變成小型高清工業(yè)相機(jī)為有序的電信號(hào)。
2023-07-11 12:45:41682 工業(yè)相機(jī)是機(jī)器視覺設(shè)備中價(jià)值量最高的組件(占比23%),由圖像傳感器、圖像采集卡、各類芯片組成,技術(shù)壁壘較高。
2023-07-11 12:17:31962 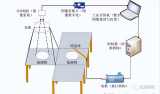
視覺堆垛程序通過相機(jī)視野內(nèi)目標(biāo)比例的變化來估算目標(biāo)的高度并引導(dǎo)機(jī)器人的運(yùn)動(dòng)補(bǔ)償目標(biāo)的偏移,不但包括X軸,Y軸和X-Y平面旋轉(zhuǎn)度R,也同時(shí)包括Z軸。
2023-07-10 14:42:021043 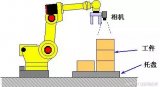
工業(yè)相機(jī)又稱攝像機(jī),相比于傳統(tǒng)的民用相機(jī)(攝像機(jī))而言,它具有高的圖像穩(wěn)定性、高傳輸能力和高抗干擾能力等,目前市面上的工業(yè)相機(jī)大多是基于CCD(Charge CoupledDevice)或CMOS(Complementary MetalOxide Semiconductor)芯片的相機(jī)。
2023-07-10 11:08:521642 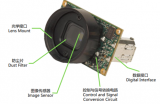
工業(yè)相機(jī)輸出的是裸數(shù)據(jù)(raw data),其光譜范圍也往往比較寬,比較適合進(jìn)行高質(zhì)量的圖像處理算法,例如機(jī)器視覺(Machine Vision)應(yīng)用。而普通相機(jī)拍攝的圖片,其光譜范圍只適合人眼視覺,并且經(jīng)過了mjpeg壓縮,圖像質(zhì)量較差,不利于分析處理。
2023-07-10 09:10:09547 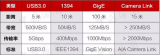
電子發(fā)燒友網(wǎng)站提供《FPGA立體相機(jī)設(shè)置-第一部分.zip》資料免費(fèi)下載
2023-06-29 09:27:060 機(jī)器視覺基本組成 根據(jù)美國(guó)自動(dòng)成像協(xié)會(huì)(AIA)的定義,機(jī)器視覺(Machine Vision)是一種應(yīng)用于工業(yè)和 非工業(yè)領(lǐng)域的硬件和軟件組合,它基于捕獲并處理的圖像為設(shè)備執(zhí)行其功能提供操作指導(dǎo)
2023-06-27 15:35:56654 逐個(gè)像素線構(gòu)建最終的2D圖像。 ? 構(gòu)建線掃描圖像需要相機(jī)與物體之間保持相對(duì)運(yùn)動(dòng),通常為沿著輸送帶或旋轉(zhuǎn)軸運(yùn)動(dòng)。當(dāng)物體移動(dòng)經(jīng)過相機(jī)面前時(shí),相機(jī)將采集一個(gè)新的像素線。 ? 視覺處理器或圖像采集卡上的軟件將存儲(chǔ)每個(gè)像素線
2023-06-26 10:29:421727 
相機(jī)標(biāo)定是計(jì)算機(jī)視覺最基礎(chǔ)也是至關(guān)重要的一個(gè)問題,標(biāo)定的精度夠不夠決定了以后的校正、去畸變、配準(zhǔn)、計(jì)算三維坐標(biāo)、恢復(fù)三維模型能否進(jìn)一步做下去。
2023-06-26 09:51:30312 處理軟件等軟硬件提供商,中游有集成和整機(jī)設(shè)備提供商,行業(yè)下游應(yīng)用較廣,主要下游市場(chǎng)包括電子制造行業(yè)、汽車、印刷包裝、煙草、農(nóng)業(yè)、醫(yī)藥、紡織和交通等領(lǐng)域。 激光加工行業(yè)引入機(jī)器視覺,用工業(yè)相機(jī)代替人眼來檢測(cè)被加工
2023-06-25 15:12:37473 工業(yè)相機(jī)是機(jī)器視覺系統(tǒng)的重要組成部分之一,在機(jī)器視覺系統(tǒng)中有著非常重要的作用。工業(yè)相機(jī)已經(jīng)被廣泛應(yīng)用于工業(yè)生產(chǎn)線在線檢測(cè)、智能交通,機(jī)器視覺,科研,軍事科學(xué),航天航空等眾多領(lǐng)域。 工業(yè)相機(jī)的主要參數(shù)包括:分辨率、幀率、像素、像元尺寸、光譜響應(yīng)特性等。下面我們來對(duì)工業(yè)相機(jī)幀率的相關(guān)知識(shí)進(jìn)行講解。
2023-06-25 10:09:442543 
這部分屬于成像器件,通常的視覺系統(tǒng)都是由一套或者多套這樣的成像系統(tǒng)組成,如果有多路相機(jī),可能由圖像卡切換來獲取圖像數(shù)據(jù),也可能由同步控制同時(shí)獲取多相機(jī)通道的數(shù)據(jù)。
2023-06-21 09:02:132343 
、判斷和檢測(cè)生產(chǎn)線上的各種產(chǎn)品,保證產(chǎn)品的質(zhì)量和一致性。與傳統(tǒng)的視覺檢測(cè)方法相比,工業(yè)AI視覺檢測(cè)系統(tǒng)具有如下幾個(gè)顯著優(yōu)點(diǎn):
1.高效性:工業(yè)AI視覺檢測(cè)系統(tǒng)可以實(shí)現(xiàn)自動(dòng)化檢測(cè),大大提高了生產(chǎn)效率
2023-06-15 16:21:56
內(nèi)核使用,可高度滿足高速視覺篩選機(jī)應(yīng)用所需的運(yùn)動(dòng)控制需求。XPCIE1028是正運(yùn)動(dòng)技術(shù)新推出的一款采用新型XPCIE總線接口的高速視覺篩選專用的運(yùn)動(dòng)控制卡,可控制多個(gè)步進(jìn)電機(jī)或數(shù)字式伺服電機(jī)。XPCIE1028運(yùn)動(dòng)控制卡適合于多軸點(diǎn)位運(yùn)動(dòng)、插補(bǔ)運(yùn)動(dòng)、軌跡規(guī)劃、手輪控制、編碼器位置
2023-06-15 15:21:410 電子發(fā)燒友網(wǎng)站提供《具有NodeMCU和Blynk的物聯(lián)網(wǎng)運(yùn)動(dòng)檢測(cè)器.zip》資料免費(fèi)下載
2023-06-15 14:33:080 在Eye-to-Hand系統(tǒng)中,視覺成像單元安裝在機(jī)器人本體外的固定位置,在機(jī)器人工作過程中不隨機(jī)器人一起運(yùn)動(dòng),當(dāng)機(jī)器人或目標(biāo)運(yùn)動(dòng)到機(jī)械臂可操作的范圍時(shí),機(jī)械臂在視覺感知信息的反饋控制下,向目標(biāo)移動(dòng),對(duì)目標(biāo)進(jìn)行精準(zhǔn)操控。
2023-06-06 14:44:59892 
隨著工業(yè)自動(dòng)化的進(jìn)程,越來越多的自動(dòng)化設(shè)備需要使用視覺相機(jī),為了節(jié)約成本,會(huì)在原有設(shè)備的基礎(chǔ)上加裝視覺相機(jī)和控制系統(tǒng)以提高自動(dòng)化效率和精度。但是,不管怎樣添加視覺相機(jī),都會(huì)面臨工況中的各種問題,例如
2023-06-06 10:03:01327 
目前有很多大產(chǎn)品的配件比如橡膠圈,在裝配過程中容易脫落、漏檢導(dǎo)致產(chǎn)品不良,對(duì)公司超成一定損失。技術(shù)在不斷發(fā)展的,隨著機(jī)器視覺技術(shù)的越來越成熟,現(xiàn)在可以用2D/CCD視覺檢測(cè)系統(tǒng)對(duì)膠圈數(shù)量、2D膠圈
2023-06-05 11:39:35
機(jī)器視覺是指利用相機(jī)、攝像機(jī)等傳感器,配合機(jī)器視覺算法賦予智能設(shè)備人眼的功能,從而進(jìn)行物體的識(shí)別、檢測(cè)、測(cè)量等功能。
2023-06-04 16:42:40230 
輸入數(shù)據(jù)來源可以是單目視覺相機(jī)、雙目視覺相機(jī),數(shù)據(jù)可以是灰度圖或者彩色圖。
基于單目圖片的稱為單目車道線檢測(cè)技術(shù),基于雙目圖片的稱為雙目車道線檢測(cè)技術(shù)。
2023-06-01 14:18:320 一、運(yùn)功控制核心
單軸運(yùn)動(dòng)、多軸直線插補(bǔ)運(yùn)動(dòng)、圓弧插補(bǔ)、連續(xù)軌跡插補(bǔ)
電子齒輪、電子凸輪
多維硬件位置比較觸發(fā)
高速位置鎖存
機(jī)器視覺飛拍
高速PWM輸出
二、一站式解決方案
32軸
2023-06-01 09:39:23
。由于兩種曝光模式的工作原理不同(全局曝光會(huì)一次性曝光所有像素,卷簾曝光一次只曝光一行像素)。如果項(xiàng)目中有拍攝高速運(yùn)動(dòng)物體的需求,都建議使用全局曝光的相機(jī)。 2、降低相機(jī)的曝光時(shí)間 曝光時(shí)間是相機(jī)指從快門打開到關(guān)閉的時(shí)間,在這段時(shí)間內(nèi),光線將穿過光圈投射到相機(jī)芯
2023-05-30 10:15:271371 
隨著工業(yè)自動(dòng)化的進(jìn)程,越來越多的自動(dòng)化設(shè)備需要使用視覺相機(jī),為了節(jié)約成本,會(huì)在原有設(shè)備的基礎(chǔ)上加裝視覺相機(jī)和控制系統(tǒng)以提高自動(dòng)化效率和精度。但是,不管怎樣添加視覺相機(jī),都會(huì)面臨工況中的各種問題
2023-05-29 14:20:35444 
? 摘要 高度精確且魯棒的定位能力對(duì)于城市場(chǎng)景中自動(dòng)駕駛車輛(AVs)至關(guān)重要。傳統(tǒng)的基于視覺的方法由于光照、天氣、視角和外觀變化而導(dǎo)致定位丟失。在本文中,我們提出一種新型的視覺語義定位算法
2023-05-22 11:42:28502 
運(yùn)動(dòng)控制卡在Windows環(huán)境下控制系統(tǒng)的非實(shí)時(shí)性問題;
4.支持一維/二維/三維PSO(高速硬件位置比較輸出),適用于視覺飛拍、精密點(diǎn)膠和激光能量控制等應(yīng)用;
5.提供高速輸入接口,便于實(shí)現(xiàn)位置鎖存;
6.支持EtherCAT總線和脈沖輸出混合聯(lián)動(dòng)、混合插補(bǔ)。
2023-05-20 10:10:03
提出一種新型的視覺-LiDAR里程計(jì)和建圖系統(tǒng)SDV-LOAM,能夠綜合利用相機(jī)和激光雷達(dá)的信息,實(shí)現(xiàn)高效、高精度的姿態(tài)估計(jì)和實(shí)時(shí)建圖,且性能優(yōu)于現(xiàn)有的相機(jī)和激光雷達(dá)系統(tǒng)。
2023-05-15 16:17:21433 
機(jī)器視覺在工業(yè)上應(yīng)用領(lǐng)域廣闊,核心功能包括:測(cè)量、檢測(cè)、識(shí)別、定位等。產(chǎn)業(yè)鏈可以分為上游部件級(jí)市場(chǎng)、中游系統(tǒng)集成/整機(jī)裝備市場(chǎng)和下游應(yīng)用市場(chǎng)。機(jī)器視覺上游有光源、鏡頭、工業(yè)相機(jī)、圖像采集卡、圖像
2023-04-26 16:50:21495 視覺堆垛程序通過相機(jī)視野內(nèi)目標(biāo)比例的變化來估算目標(biāo)的高度并引導(dǎo)機(jī)器人的運(yùn)動(dòng)補(bǔ)償目標(biāo)的偏移,不但包括X軸,Y軸和X-Y平面旋轉(zhuǎn)度R,也同時(shí)包括Z軸。使用iRVision 2.5D允許機(jī)器人只借助一個(gè)普通2D相機(jī)來拾取碼放堆集的目標(biāo)。
2023-04-21 09:42:18261 VPLC532E是正運(yùn)動(dòng)推出的一款EtherCAT視覺總線控制器,控制器集成了2個(gè)千兆以太網(wǎng)以及2個(gè)USB3.0、2個(gè)USB2.0接口,支持多種工業(yè)相機(jī),支持多種視覺功能和復(fù)雜的運(yùn)動(dòng)控制功能。
2023-04-19 12:38:34376 基于AI智能的視覺識(shí)別,是當(dāng)前人工智能最主要的應(yīng)用功能之一。通過對(duì)工業(yè)相機(jī)、攝像頭、視覺傳感器拍攝采集到的圖像/視頻進(jìn)行算法分析,實(shí)現(xiàn)對(duì)畫面中人體、物體、事物運(yùn)動(dòng)狀態(tài)、變化情況的感知與反饋,最后實(shí)現(xiàn)業(yè)務(wù)流程自動(dòng)自主,從而有效提高生產(chǎn)力和效率。
2023-04-18 18:03:20689 
正運(yùn)動(dòng)VPLC532E視覺總線控制器,助力智能制造快速開發(fā)
2023-04-14 10:35:42402 
相機(jī)的空間分辨率卻表示它的空間極限分辨能力。根據(jù)前述相機(jī)奈奎斯特定律,相機(jī)要能恢復(fù)空間圖像,必須至少使用2個(gè)像素來表示圖像的最小單元。可以通過像素的物理大小來計(jì)算相機(jī)的空間分辨率。
2023-04-10 14:27:49615 
工業(yè)相機(jī)是機(jī)器視覺系統(tǒng)中的一個(gè)關(guān)鍵組件,其最本質(zhì)的功能就是將光信號(hào)轉(zhuǎn)變成有序的電信號(hào)。選擇合適的相機(jī)也是機(jī)器視覺系統(tǒng)設(shè)計(jì)中的重要環(huán)節(jié),相機(jī)的選擇不僅直接決定所采集到的圖像分辨率、圖像質(zhì)量等,同時(shí)也與整個(gè)系統(tǒng)的運(yùn)行模式直接相關(guān)。
2023-03-28 14:52:403264 工業(yè)相機(jī)是機(jī)器視覺系統(tǒng)中的一個(gè)關(guān)鍵組件,其最本質(zhì)的功能就是將光信號(hào)轉(zhuǎn)變成有序的電信號(hào)。選擇合適的相機(jī)也是機(jī)器視覺系統(tǒng)設(shè)計(jì)中的重要環(huán)節(jié),相機(jī)的選擇不僅直接決定所采集到的圖像分辨率、圖像質(zhì)量等,同時(shí)也與整個(gè)系統(tǒng)的運(yùn)行模式直接相關(guān)。
2023-03-28 14:41:323661 工業(yè)相機(jī)和普通相機(jī)的區(qū)別主要體現(xiàn)在以下幾個(gè)方面:
適用場(chǎng)景不同:普通相機(jī)主要用于拍攝日常生活中的照片和視頻,而工業(yè)相機(jī)則用于各種工業(yè)生產(chǎn)環(huán)境中的圖像采集和分析,如機(jī)器視覺、品質(zhì)檢測(cè)、自動(dòng)控制等。
2023-03-28 14:21:341933 相機(jī)包帶加厚肩帶 攝影包相機(jī)包電腦包減壓彈力單肩帶 背帶金屬扣
2023-03-28 13:03:52
相比于傳統(tǒng)的數(shù)碼相機(jī),運(yùn)動(dòng)相機(jī)采用電子防抖的方式,在實(shí)際拍攝時(shí)只有部分的畫面,通過內(nèi)置陀螺儀和加速度計(jì)對(duì)攝像機(jī)抖動(dòng)方向進(jìn)行模糊判斷,利用處理器的資源進(jìn)行計(jì)算、并對(duì)剩下的畫面進(jìn)行補(bǔ)充,從而產(chǎn)生防抖的效果。隨著處理器的不斷發(fā)展,電子防抖由于其成本的優(yōu)勢(shì),成為了運(yùn)動(dòng)相機(jī)的主流防抖方式。
2023-03-24 09:18:17949 
 電子發(fā)燒友App
電子發(fā)燒友App
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論