 電子發燒友App
電子發燒友App


AGV即“自動導引運輸車”,是指裝備有電磁或光學等自動導引裝置,能夠沿規定的導引路徑行駛,具有安全保護以及各種搬運功能的運輸車。其特點是無人駕駛,在導航設備的幫助下就能按照預設路線自動駕駛。能24小時實現自動出入裝卸站、工作臺和貨架等,充分適應工作時間長、搬運量大、搬運線路復雜、柔性高等嚴苛的技術要求。
AGV控制系統分為地面控制系統、車載控制系統及導航/導引系統。
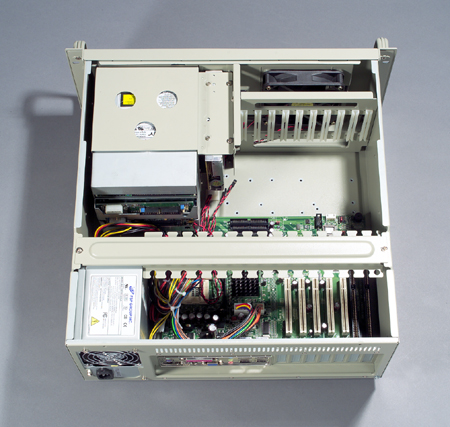
AGV地面控制系統采用工控機模式,主要是對AGV進行任務分配、車輛管理、交通管理、通訊管理等。
任務分配:提供對AGV地面控制程序的解釋執行環境;提供根據任務優先級和啟動時間的調度運行;提供對任務的各種操作如啟動、停止、取消等。
車輛管理:根據物料搬運任務的請求,分配調度AGV執行任務,根據AGV行走時間最短原則,計算AGV的最短行走路徑,并控制指揮AGV的行走過程,及時下達裝卸貨和充電命令。
交通管理:根據AGV的物理尺寸大小、運行狀態和路徑狀況,提供AGV互相自動避讓的措施,同時避免車輛互相等待的死鎖方法和出現死鎖的解除方法;AGV的交通管理主要有行走段分配和死鎖報告功能。
通訊管理: AGV地面控制系統與AGV單機、地面監控系統、地面IO設備、車輛仿真系統及監控中心的通信功能。AGV的工控機通過車載WiFi模塊與地面無線路由器建立連接,搭建無線通信網絡,實現與監控中心的數據交換。
AGV車載控制系統,即AGV單機控制系統,在收到工控機的指令后,負責AGV單機的導航、導引、路徑選擇、車輛驅動、裝卸操作等功能。
導航:AGV單機通過自身裝備的導航器件測量并計算出所在全局坐標中的位置和航向。
導引:AGV單機根據現在的位置、航向及預先設定的理論軌跡來計算下個周期的速度值和轉向角度值即,AGV運動的命令值。
路徑選擇:AGV單機根據工控機的指令,通過計算,預先選擇即將運行的路徑,并將結果報送地面控制系統,能否運行由地面控制系統根據其它AGV所在的位置統一調配。AGV單機行走的路徑是根據實際工作條件設計的,它有若干“段”組成。每一“段”都指明了該段的起始點、終止點,以及AGV在該段的行駛速度和轉向等信息。
車輛驅動:AGV單機根據導引的計算結果和路徑選擇信息,通過伺服器件控制車輛運行。AGV舵機轉向采用差分電壓信號伺服系統,其特點是能夠方便地設置舵機的零點位置以及在AGV斷電重啟后能準確獲知舵機角度的所在位置。當舵輪轉動時,安裝在舵機轉盤上電位器的線性電阻產生反饋電壓U0,工控機發出電壓輸出指令,將輸出目標電壓值U1與反饋電壓U0進行差分處理。差分信號通過調節,使得反饋電壓U0不斷接近目標電壓值U1,在控制過程中把測量得到的目標電壓U1和對應的角度量化,從而控制車輪的轉向。
目前用于AGV的導航/導引技術主要有直接坐標、電磁導引、磁帶導引、光學導引、激光導航、慣性導航、視覺導航等。
工控機在AGV中的應用
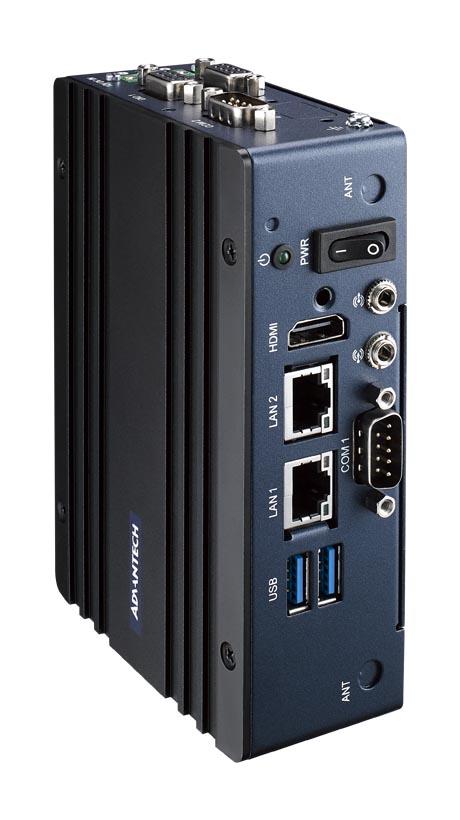
工控機具有較高的防磁、防塵、防沖擊能力,可在復雜環境下長時間穩定運行,可為AGV提供高效、可靠的控制系統。嵌入式工控機采用無風扇設計,結構緊湊、散熱性好、防水防塵性能優,可以靈活的應用在對溫度及使用空間等苛刻的環境中,安裝和維護簡單、方便,可廣泛應用在地面控制系統。隨著計算機技術的飛速發展,嵌入式工控機的軟硬件水平都得到很大提高,已經可以滿足AGV產品的各種需要。與工控機相比,嵌入式工控機具有成本低、功耗小等優勢,這對必須使用自身攜帶電源的AGV產品尤其重要。
工業平板電腦集主機、液晶顯示器、觸摸屏為一體,具有功耗低、防水防塵、抗振能力強等特點,可在較寬的溫度范圍下長時間穩定工作,同時具備觸摸功能,是AGV車載控制系統中人機界面的最佳解決方案。
隨著智能制造的來臨,工廠智能化已成為不可逆的發展趨勢,AGV作為自動化技術升級重要的核心組成部分,未來需求可觀。研為十年來不懈追求工控機的更高品質,推進智能工廠的深化與發展,助力工業4.0時代。
編輯:fqj



















































 工商網監
工商網監
評論