 電子發燒友App
電子發燒友App


0引 ??言
氮素是作物需求量最大的礦質營養元素,但素營養狀況對作物葉綠素含量影響顯著,可作為作物長勢檢測的一種有效指標。作物葉片顏色的變化實質上是作物體內葉綠素含量的變化,而葉片葉綠素濃度與氮素含量之間有密切的關系。但傳統的葉綠素測算手段繁瑣且難以實時監控因此需要尋找一種快速無損的檢測方法,為作物葉綠素的實時快速檢測提供便利。
近年來,隨著無人機技術的興起,越來越多的學者利用無人機遙感對作物長勢和生理狀態進行評估,快速有效地對作物生長特征進行動態監測。通過提取葉片的顏色特征,利用線性擬合和逐步回歸分析建立黃瓜初花期葉片光合色素含量的顏色特征估算模型以及葉片氮含量的回歸模型口。結合數字圖像技術,采用較低的飛行高度獲取田塊圖像,得到較高精度的大田植株圖像,可現大田煙草缺苗數估測。
目前國內外學者利用無人機可見光光譜對作物葉片葉綠素合量診斷方面已經有大量研究,且主要集中在油菜、冬小麥等作物,但利用無人機可見光影像進行花生葉片葉綠素含量反演的研宄較少。因此,本研充應用無人機遙感平臺搭載數碼相機組成的可見光遙感系統,低空獲取大面積花生冠層可見光光譜參數,結合神經網絡算法,實現利用無人機通感實時監測花生葉片葉綠素含金的動態變化,為快速、準確地測定花生養分狀況提供依據。
1材料與方法
1.1?材料與設計
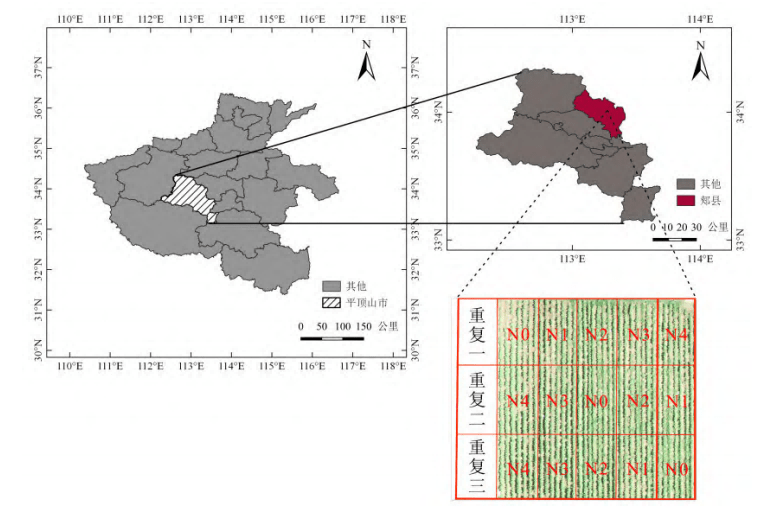
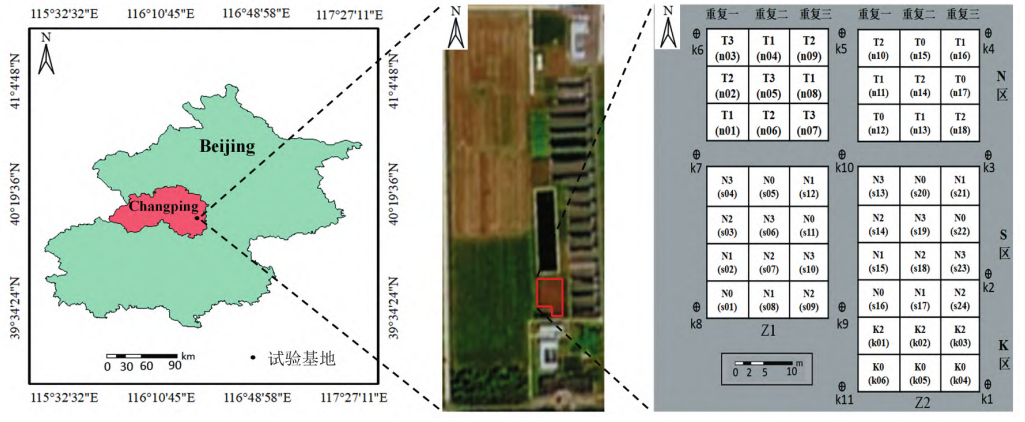
試驗于8-12月在華南農業大學增城試驗基地高產田進行。供試品種為花育22號和花育25號。試驗點0~20cm土壤基礎肥力狀況:有機質15.31g/kg;堿解63.7g/kg;速效磷(P2O5)76.3mg/kg;速效鉀(K2O)103.6mg/kg;交換性鈣12.56g/kg;pH7.6。采用起壟種植方式,壟距85cm,壟面寬55cm,壟高10cm,壟上2行花生,壟上小行距30~35cm,株距20cm,播深3.5~4.0cm,每穴2粒。試驗設5個氮素水平,N0(不施氮,對照);N1(純氮90kg/hm2);N2(純氮150kg/hm2);N3(純氮225kg/hm2);N4(純氮300kg/hm2),3次重復,共30個小區。
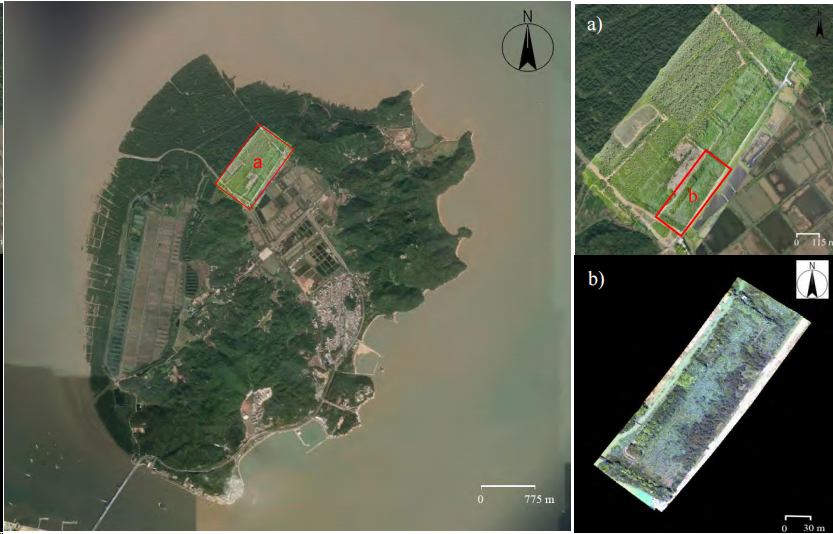
1.2?花生冠層航拍圖像信息的獲取
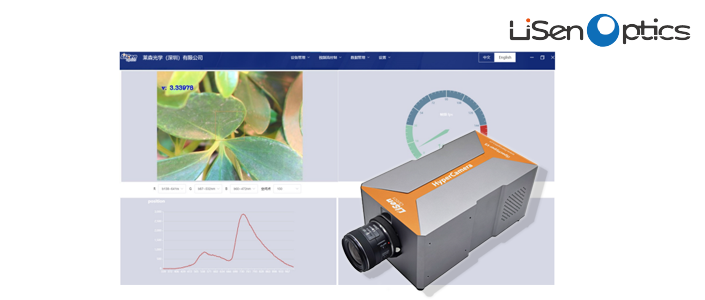
可采用萊森光學多旋翼無人機高光譜成像系統,分別在苗期(8?月30日)開花下針期(9月18日)結美期(10月1日)飽果期(10月12日)收獲期?(11月15日),選擇晴天光線較強的時間?10:00-14:00?進行(太陽高度角大于45°)拍攝。并使用LiSpecView-Hyper軟件對無人機圖像進行分析,獲取試驗田的全局遙感圖像,最后通過?ENIV?對圖像進行項處理,包括圖片降噪,土地黑化等,以去除環境對實驗結果的影響。
1.3?樣品采集與分析
每小區?隨機取4株植株并標注位置,在選取植株中測定植株3片功能葉并測定葉綠素含量,使用3片葉的葉綠素含量平均值作為植株的葉綠素平均值,最終的到120個花生葉片葉綠素含量。
1.4?無人機圖像處理
無人機圖片處理主要包括圖片拼接,圖片降噪,圖片分割和圖像特征值的提取,如圖1所示。
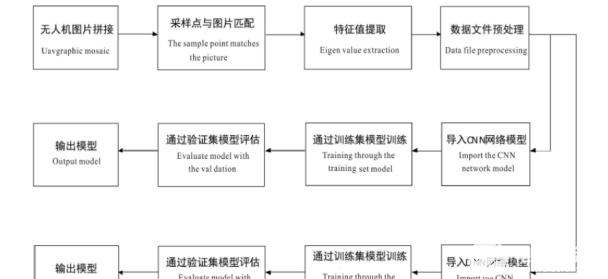
圖1?無人機圖片處理主要步驟
經過圖片采樣點匹配后進行特征值提取,后將提取數據技神經網絡輸入需求格式進行保存在完成訓練集和測試集的劃分后用訓練集進行模型的訓練,并利用驗證集判斷模型的優劣。本文采用LiSpecView-Hyper軟件對無人機圖像進行拼接使用?Photoshop?進行圖片分制,使用?ENVT?進行圖片特征值的提取,使用?Python?語言完成?CNN模型的建立。
1.5?DNN網絡模型建立
深度神經網絡(Deep?neural?network,?DNN),包括輸出層,輸入層和隱藏層的神經網絡系統,區別于傳統淺層神經網絡,DNN?存在多層隱藏層對數據特征的提取能力更強,分析的效果和速度更快。但是全連接?DNN?的結構中下層神經元和所有上層神經元都能夠形成連接,從而導致參數數量膨脹,這不僅容易導致過擬合,也容易造成陷入同部最優。
為保證網絡能充分學習數據特征而且不出現過擬合現象,經過多次實驗,最終本文得到一組實驗結果優越的網絡結構,如圖?2所示:
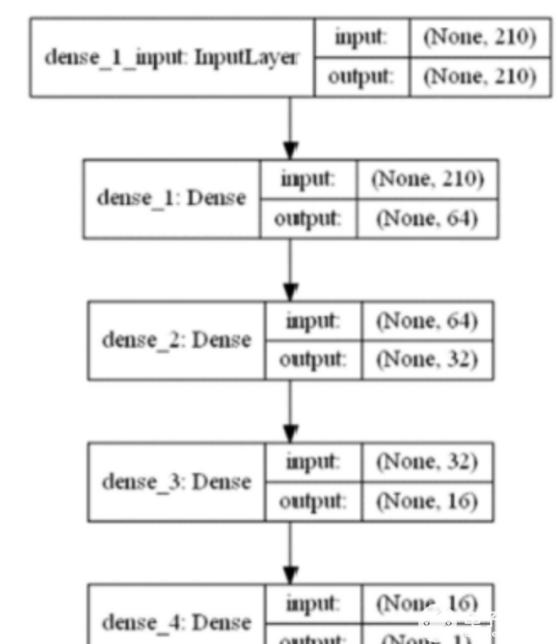
圖2?DNN網絡模型結構
本文使用DNN網絡共有4層,包括3層隱藏層(包含輸入層)和1層輸出層,在隱藏層中是用RELU為激勵函數,輸出層為線性函數,將模型的訓練次數定位400次。
1.6?CNN網絡模型建立
卷積神經網絡(convolutional?neural?network,?CNN),是一種深度前饋人工神經網絡,可基于梯度下降的方法進行訓練得到模型參數。相比較傳統的神經網絡,雖然表征能力已經很強,兩層的神經網絡可近似表述所有函數,但是卻很難訓練,而卷積層的提出,在數據的各個區域上,使用數量較少的卷積核參數提取特征,并輔以池化層對數據進行降維,壓縮數據和參數的數量,減少過擬合,并提高模型的容錯性經過訓練的卷積神經網絡可學習數據的特征,從而預測植物葉綠素的水平。
為保證網絡能充分學習數據特征而且不出現過擬合現象,經過多次試驗,最終本文得到一組實驗結果優越的網絡結構,如圖?3所示:
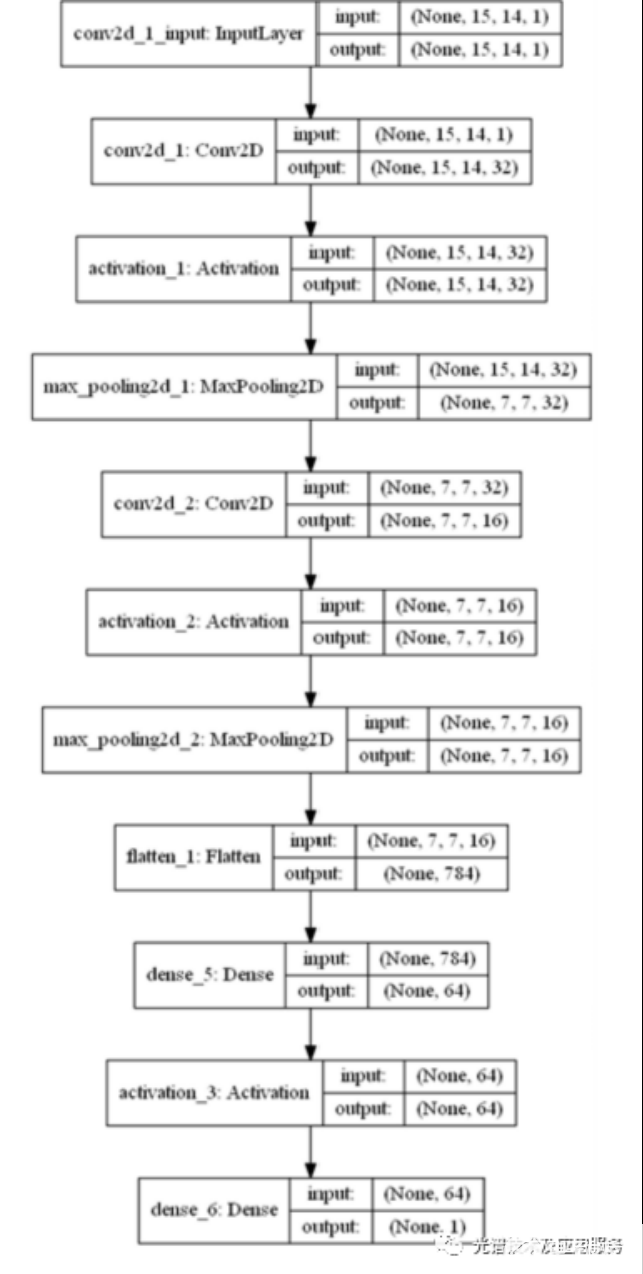
圖3?CNN網絡模型結構
本文使用CNN網絡共有7層神經網絡,包括2個卷積層、2個池化層、2個全連接層和輸出層組成,卷積層和池化層由多個特征圖組成,每個特征圖由多個神經元組成,每一層的特征圖作為下一層的輸入。本文中使用RELU為激勵函數,卷積核大小均為5x5,步幅默認值1.并采用最大池化為池化層的方法。將模型的訓練次數定位400次。
神經網絡中輸入14個圖像特征參數為自變量,并輸入葉綠素相對值為訓練和模型估計提供依據,每個網絡重復訓練5次,獲得其預測值數據,并計算實測值和預測值的平均相對誤差和平均絕對誤差。
2結果與分析
2.1?施氮量對葉片葉綠素含量的影響
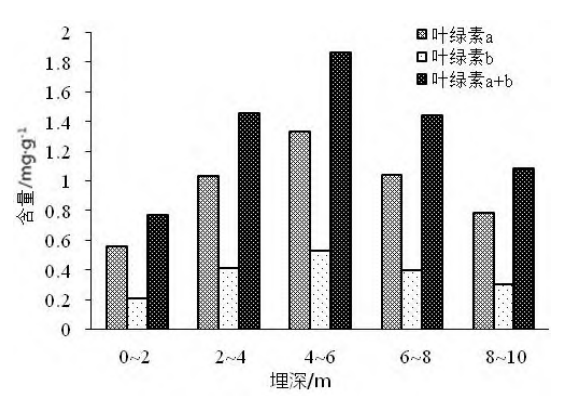
由圖4可知,兩個花生品種的葉片葉綠素含量均隨生育進程呈先上升后下降的趨勢,同一生育期不同施氮量比較發現,150kg/hm2氮處理葉綠素含量明顯低于225kg/hm2和300kg/hm2處理。不同花生品種間比較發現,花育22號品種225kg/hm2處理葉片葉綠素含量最高,而花育25號品種300kg/hm2處理葉片葉綠素含量最高。
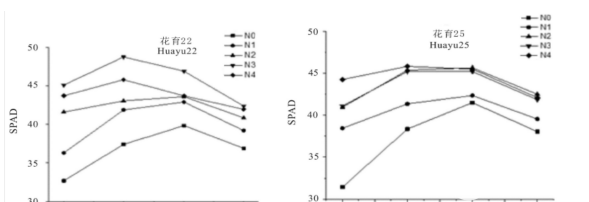
圖4?施氮量對花生葉片葉綠素含量的影響
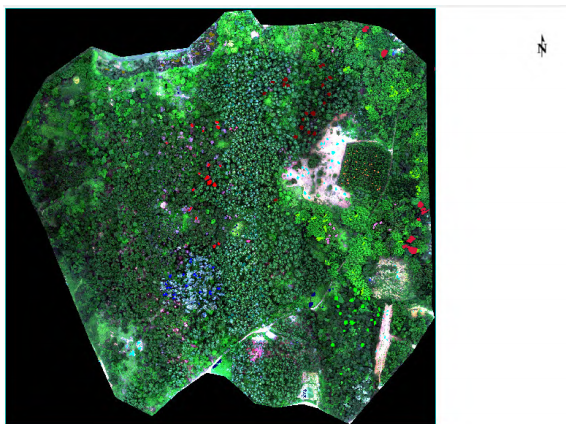
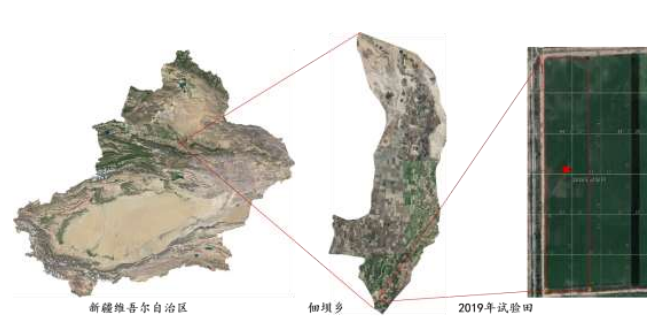
圖5?無人機拍攝拼接圖
分析可知,葉綠素含量平均值為41.5475,最大值為58.0,最小值為26.6.同時本文隨機選取96組數據為模型的樣本集,24組數據為模型測試集。
2.2?遙感影像參數的獲取
當無人機完成圖片拍攝后使用LiSpecView-Hyper軟件對無人機圖像進行拼接,并使用ENVI對圖像參數進行提取。
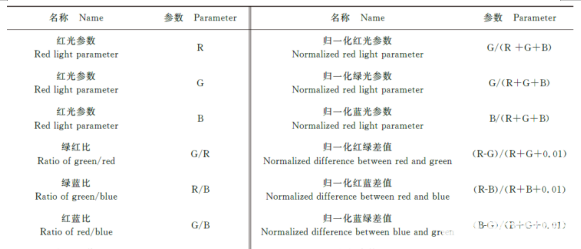
實驗采集的無人機圖像是可見光圖像,在可見光圖像中,R、G、B分量分別位于622~760nm、492~577nm、435~450nm區間,而作物所含的葉綠素a與葉綠素b在435~450nm和622~760nm內存在光譜續收,在492~577nm內存在反射的典型特征,因此利用R、G、B以及由它們組合成的顏色特征植被指數可用于花生葉片葉綠素檢測。因而本文建立了紅光、綠光、藍光、歸一化紅光、歸一化綠光等參數建立檢測模型。所使用的圖像特征參數及計算公式見表1。
表1?圖像特征參數及計算公式
2.3?神經網絡的輸出結果比較
理想的神經網絡輸出的預測值應該和農學的數據非常接近,平均相對誤差和平均絕對誤差應該向0靠近。由表2圖6可知,DNN?的樣本集預測值和農學預測值訓練集的平均絕對誤差在0.80~0.92之間,測試集在8.7-8.9之間。而CNN的預測值和農學實測值訓練集的平均絕對誤差在1~2之間,預測集在5.8一6.6之間。說明?CNN?模型對參數變化的解釋能力好于DNN,但過擬合程度大于DNN。兩者的訓練集平均絕對偏差和測試集平均誤差均在誤差范圍內,因此認為這2個模型均可作為葉綠素含量估測的模型。
表2?實測值和預測值的平均絕對誤差

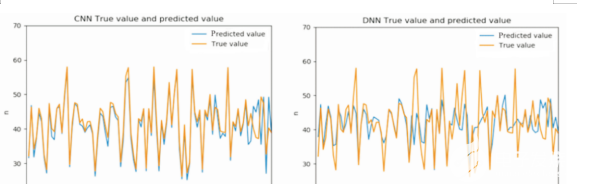
圖6?CNN和DNN預測值和實測值曲線
3討論和結論
作物葉片葉綠素的合成需要大量氮素作為物質基礎,施氮量會直接影響作物葉片葉綠素含量。葉綠素作為植物光合作用的核心部分所吸收的大陽輻射是光合作用色素含量的函數,相關系數達?0.689。
遙感可見光影像作為遙感數據的重要組成部分,包含大量信息。直接提取遙感圖像的R、G、B值為參數建立模型,會存在光線變化,陰影及其他環境的影響,對模型的建立存在干擾,模型效果較差。因此,本文為保證信息的準確性,將14個圖像特征參數作為輸入參數輸入模型中,最優時平均相對誤差達0.8019,效果優于直接提取?R、G、B值為參數建立的模型。這與前人對雜草和土壤背景分析結果一致。
傳統的淺層網絡模型操作簡單,對于多維數據的處理能力低下,對數據的特征學習能力弱,需要大量的訓練才可達到較好效果。而?DNN?是一種具備至少一個隱層的神經網絡,通過增加網絡的隱藏層層數,為模型提供了更高的抽象層次,從而提高網絡對數據特征的學習能力。CNN?在此基礎進行優化,使用卷積層自動提取數據的特征更改神經元連接方式,使用局部連接及權值共享減少訓練參數數量,提高模型對數據的分析和對特征的學習能力。本文采用DNN?和CNN?作為模型的網絡結構,訓練400次后得到了較好效果。
本研究中,CNN模型和DNN模型完成400次訓練后,DNN的樣本集預測值和農學實測值訓練集的平均絕對誤差在?0.80~0.92?之間,測試集在8.7~8.9之間。而?CNN?的預測值和農學實測值的訓練集的平均絕對誤差在1~2之間,預測集在5.8~6.6之間。CNN模型訓練集和預測集的平均絕對誤差更為接近,證明在處理多維度數據時,CNN?擁有更好的收斂能力,相同訓練次數預測結果更準確。對模型進行測試時,部分結果和預測值偏差較大,可能由于數據量較小,模型無法處理全部情況,或模型建立有一定結構問題,存在可修改部分,尚需進行模型優化。
綜上所述,以無人機搭載可見光相機獲取花生不同時期可見光光譜圖像為基礎,運用?CNN和DNN?網絡模型,建立無人機可見光光譜圖像和葉片葉綠素含量的關系模型發現,利用?DNN和?CNN?所建立的花生葉片葉綠素監測模型的預測值和農學實測值的平均絕對誤差均在0.80~0.92?和1~2?之間,均可較好地預測花生葉片的葉綠素含量,為花生氮營養反演提供準確、快速實時的監測診斷方法。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統的研發、生產和銷售。
審核編輯:湯梓紅






























 工商網監
工商網監
評論