 電子發燒友App
電子發燒友App


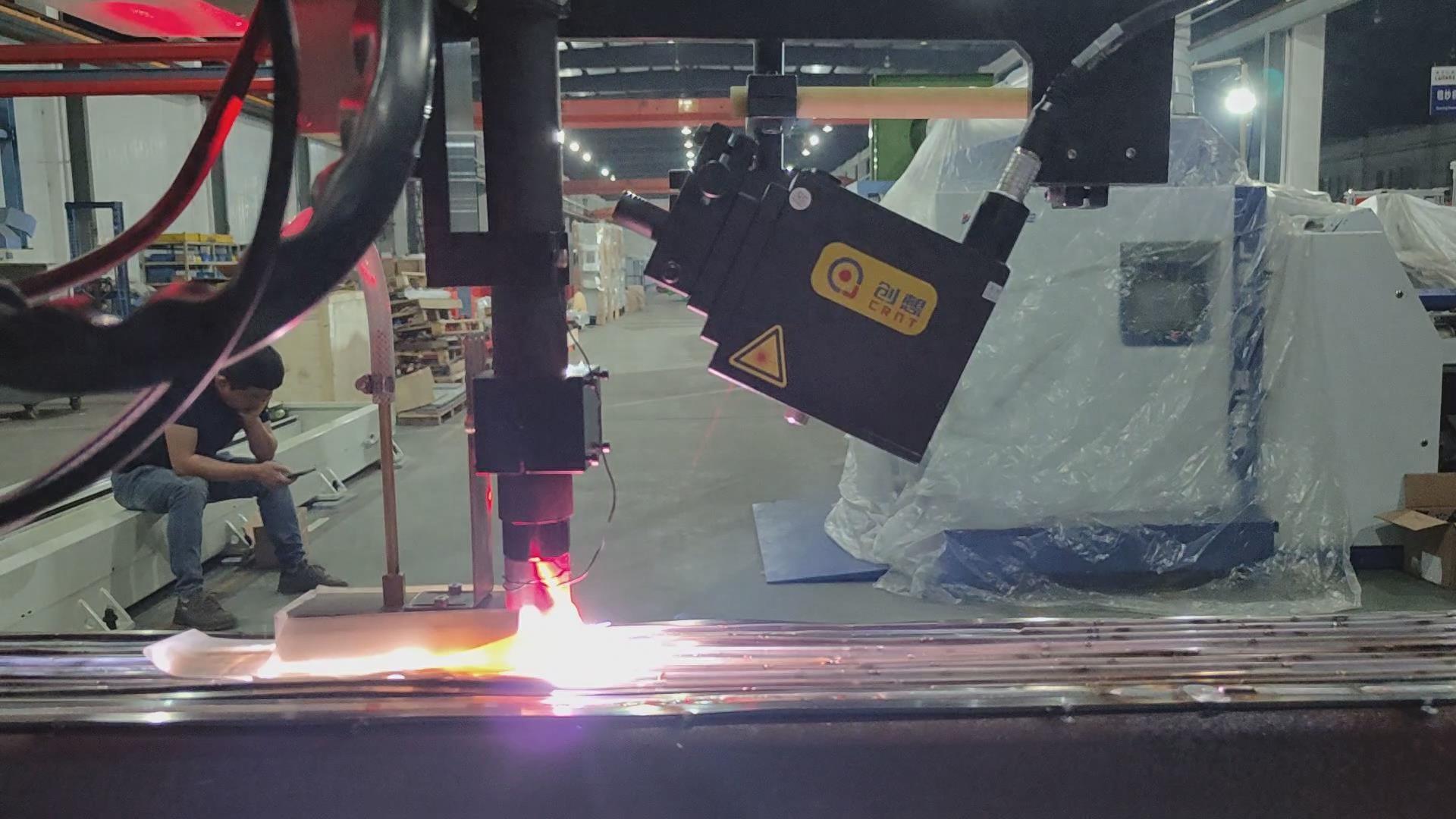
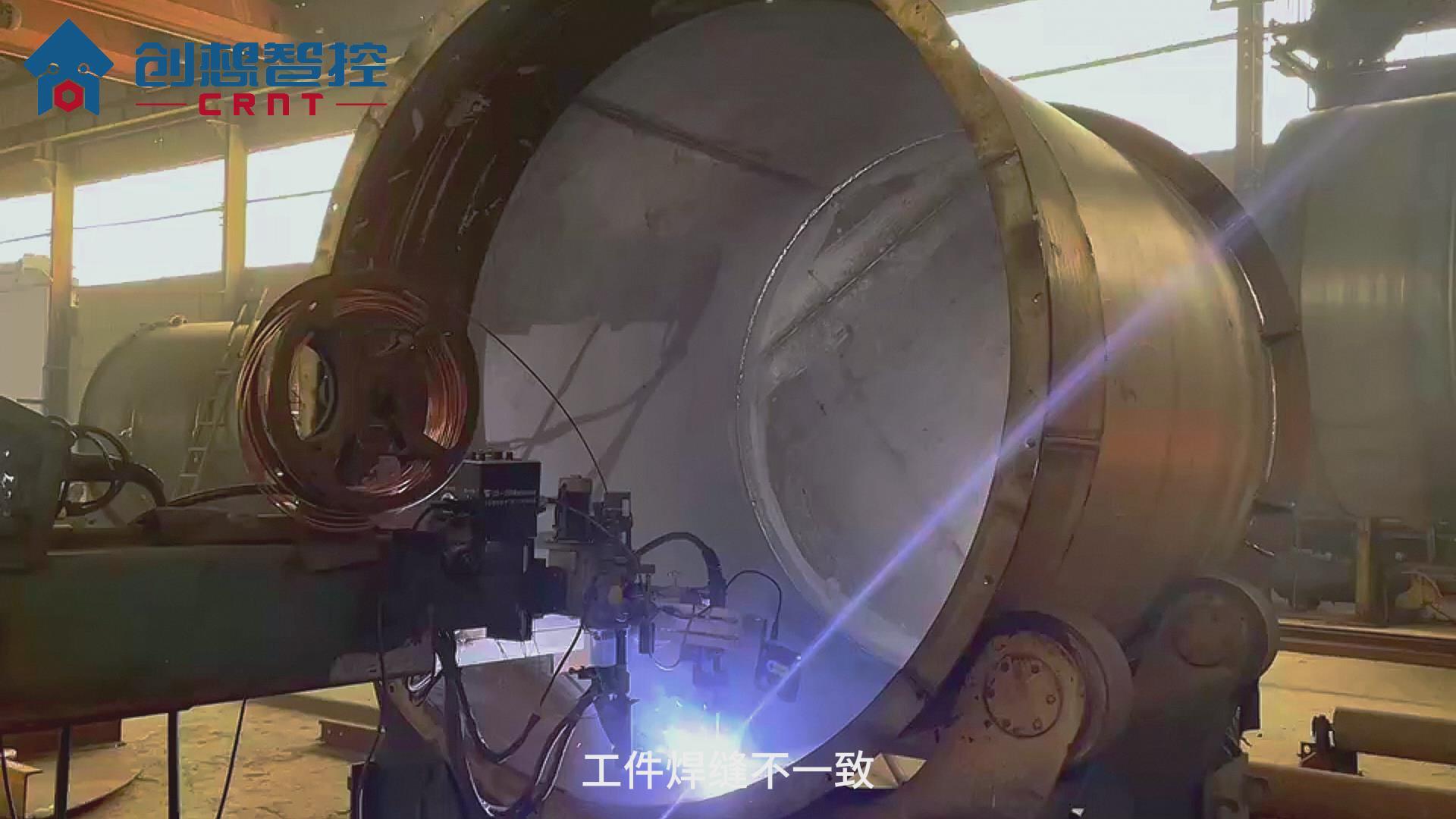
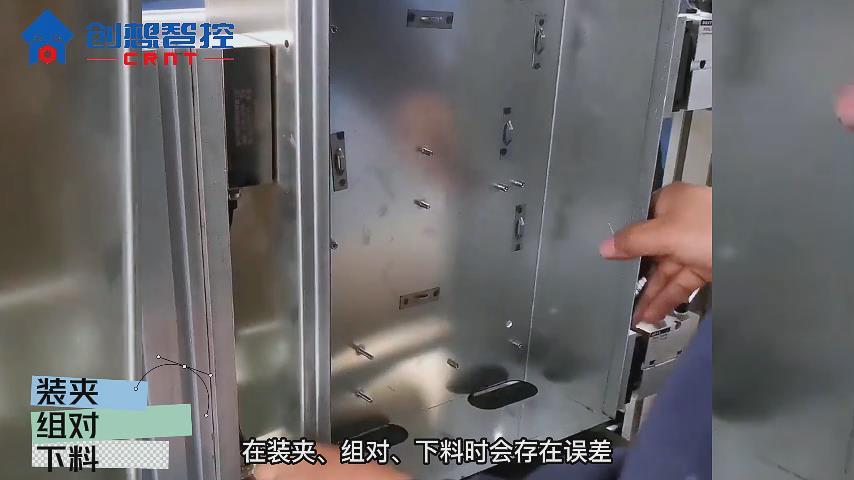
激光焊雖然優勢明顯,但也存在缺陷。由于激光聚焦后光斑尺寸小,焊縫窄,因此激光焊對母材的加工精度、工件裝配精度和光束定位精度有極高的要求,否則很容易造成漏焊、偏焊等焊接缺憾,更嚴重的可能導致工件報廢,無形中增加企業的生產成本。第三代焊縫跟蹤技術,可解決激光焊應用中漏焊、偏焊問題。通過給激光焊的工業機器人或焊接專機配套激光焊縫跟蹤系統來實現。下面來看看激光焊接的焊縫跟蹤系統介紹。
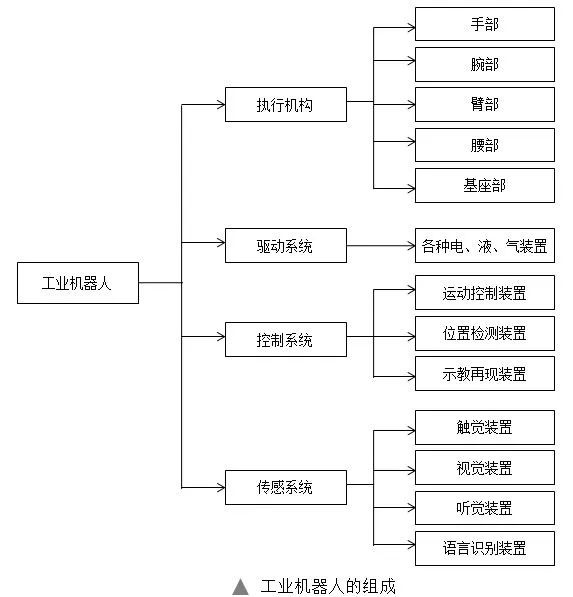
焊縫跟蹤系統主要由三部分組成:傳感器、控制系統、執行機構。傳感器是其最重要的組成部分。目前,應用前景好的是激光視覺傳感器。激光視覺傳感器精度高、再現性好,不僅可以用于焊縫跟蹤,而且可以用于檢測坡口形狀、寬度和截面,為焊接參數的自適應控制提供依據。瑞豐光電激光專注十六年的研發技術和生產,憑借多年的激光設備研發經驗,產品技術成熟,產品性能安全穩定。公司遵循“技術創新、產品創新、服務創新”的經營理念,給客戶提供最優質的產品及服務。
激光視覺傳感器算法簡單、實時性好、實現較簡單、成本較低。也因為視覺傳感器所獲得的信息量大,結合計算機視覺和圖像處理的最新技術成果,大大增強了焊縫跟蹤系統的外部適應能力。視覺傳感器采用的光電轉換器件最簡單的是單元感光器件,如光電二極管等;其次是一維的感光單元面陣,如面陣CCD,是二維圖像的常規感光器件。
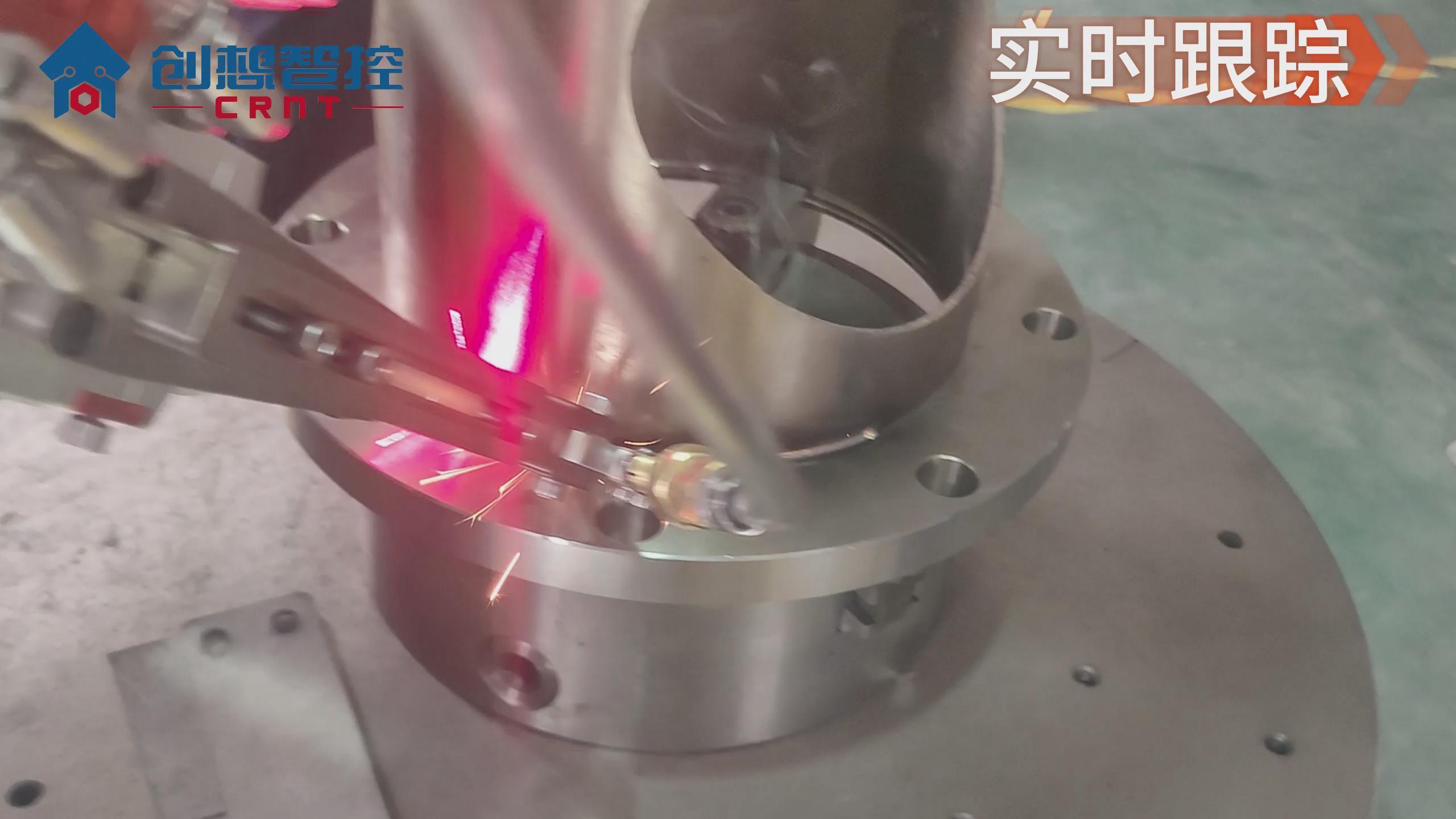
激光焊縫跟蹤原理:
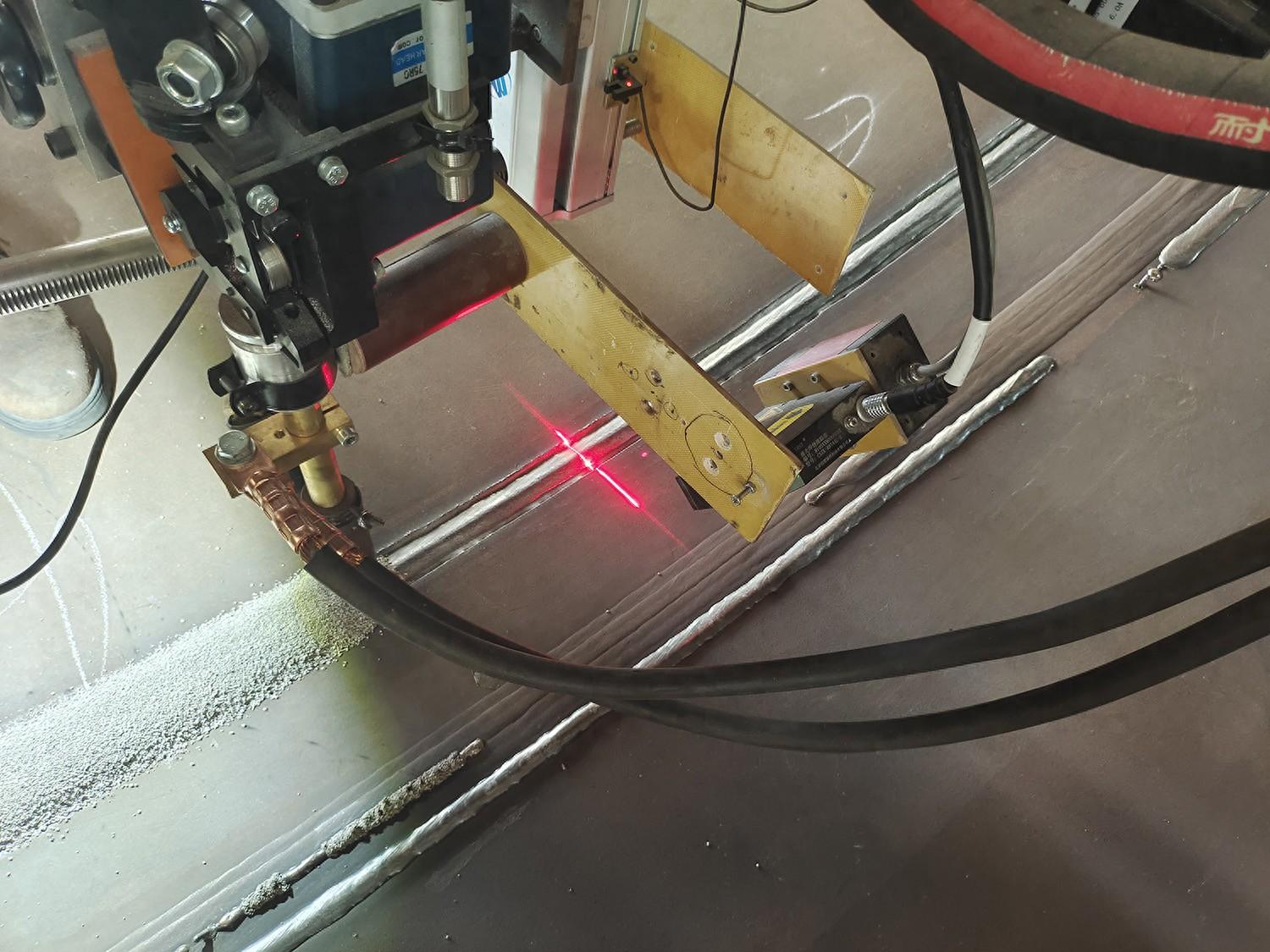
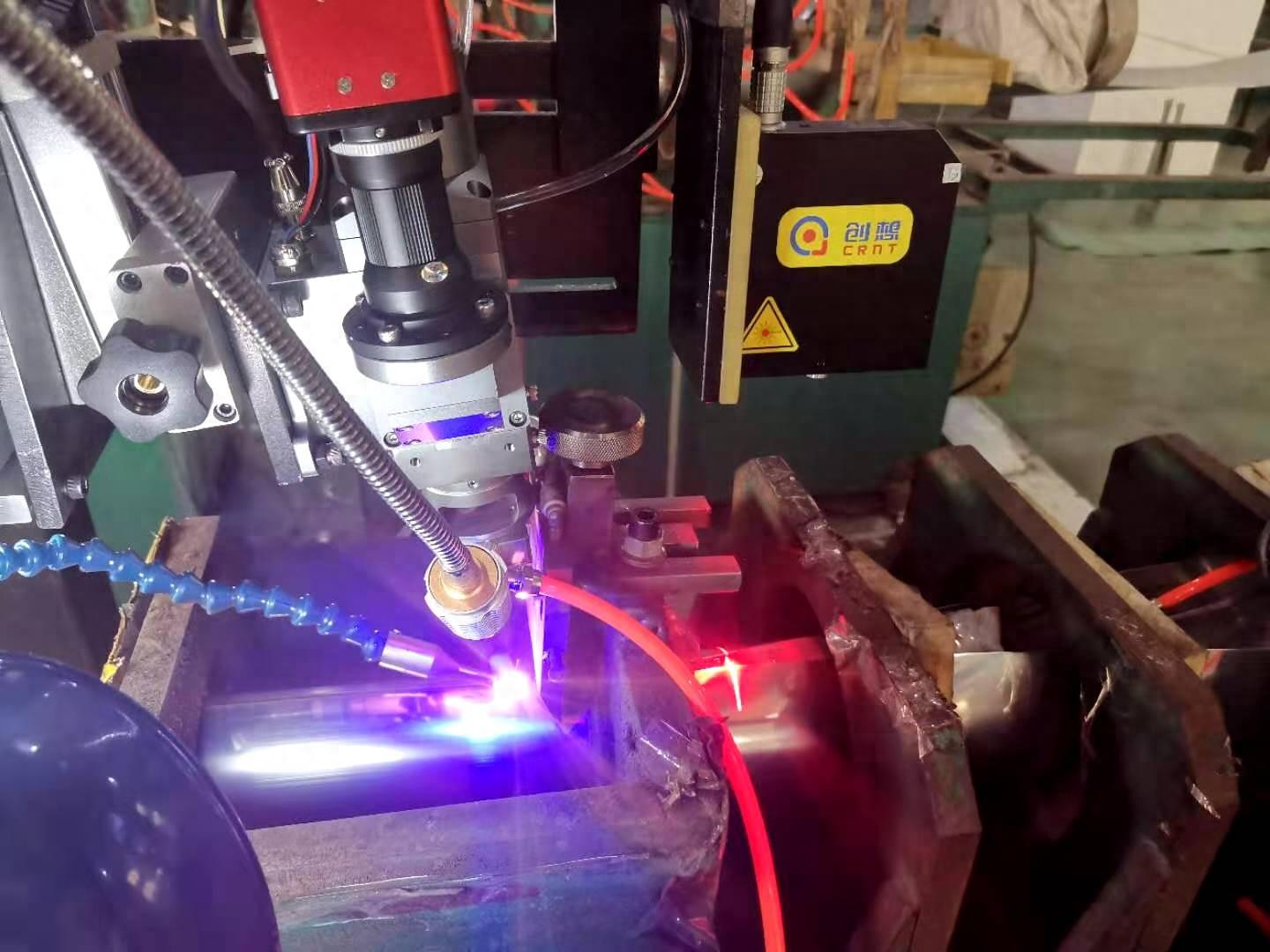
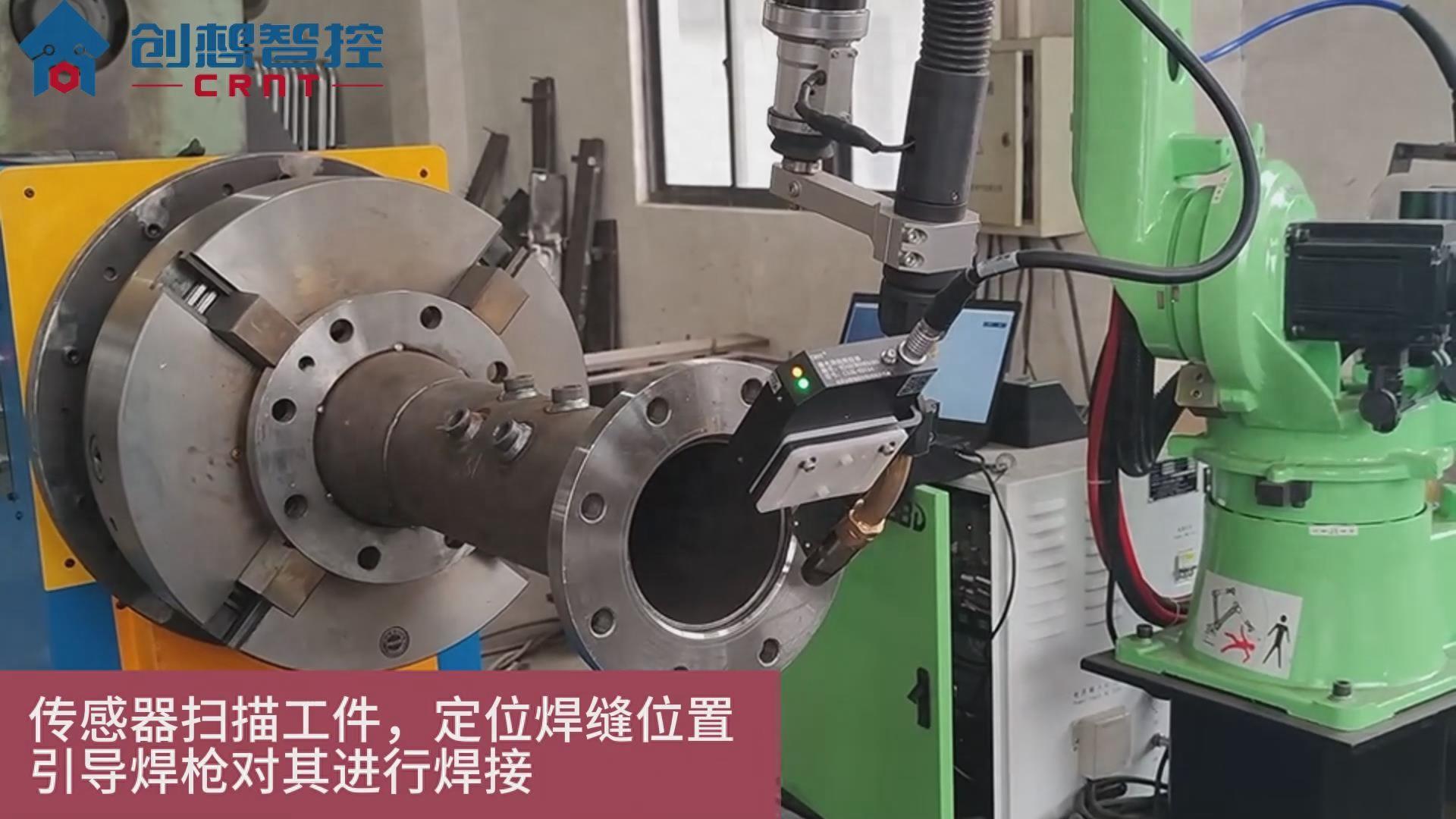
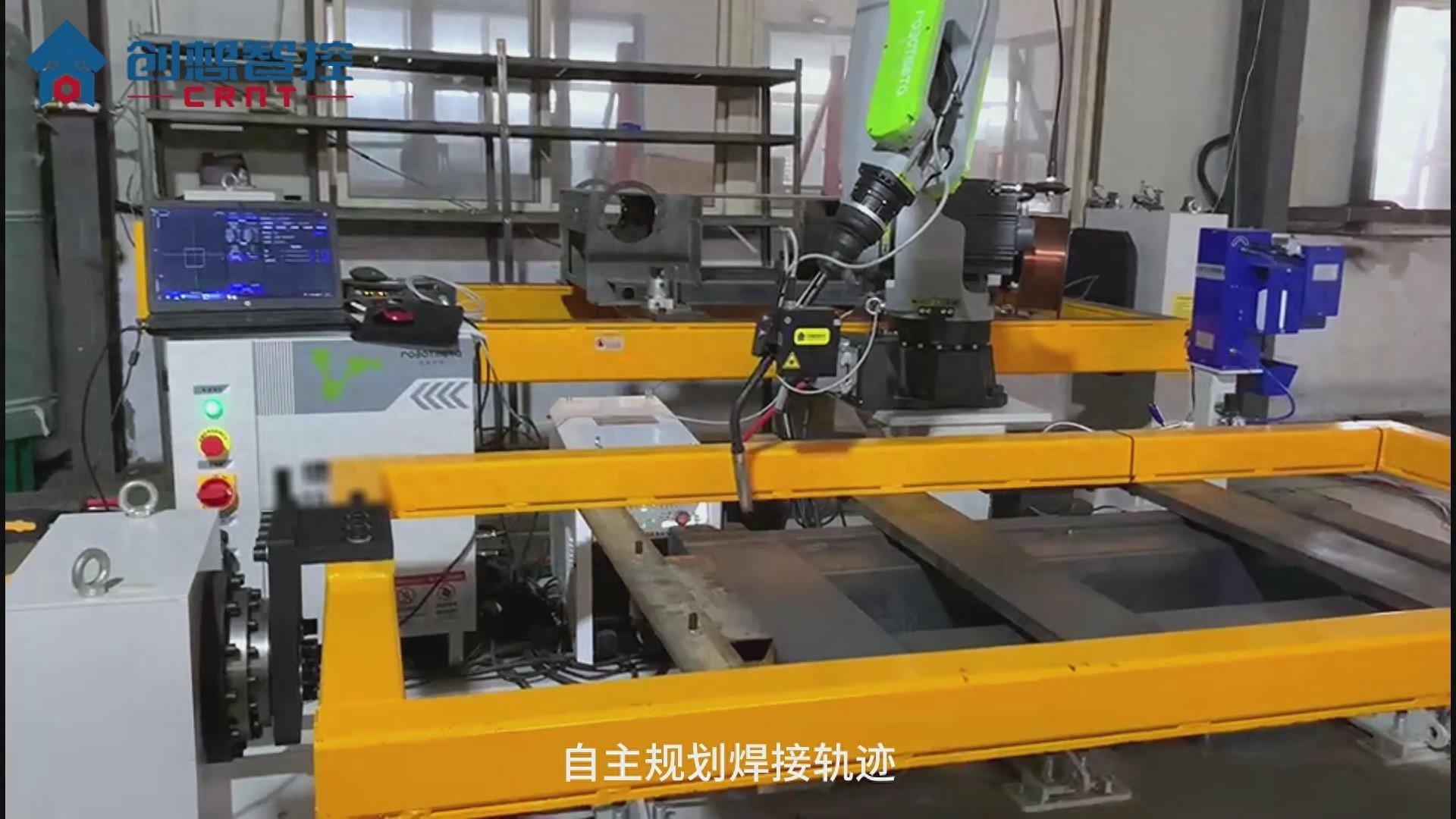
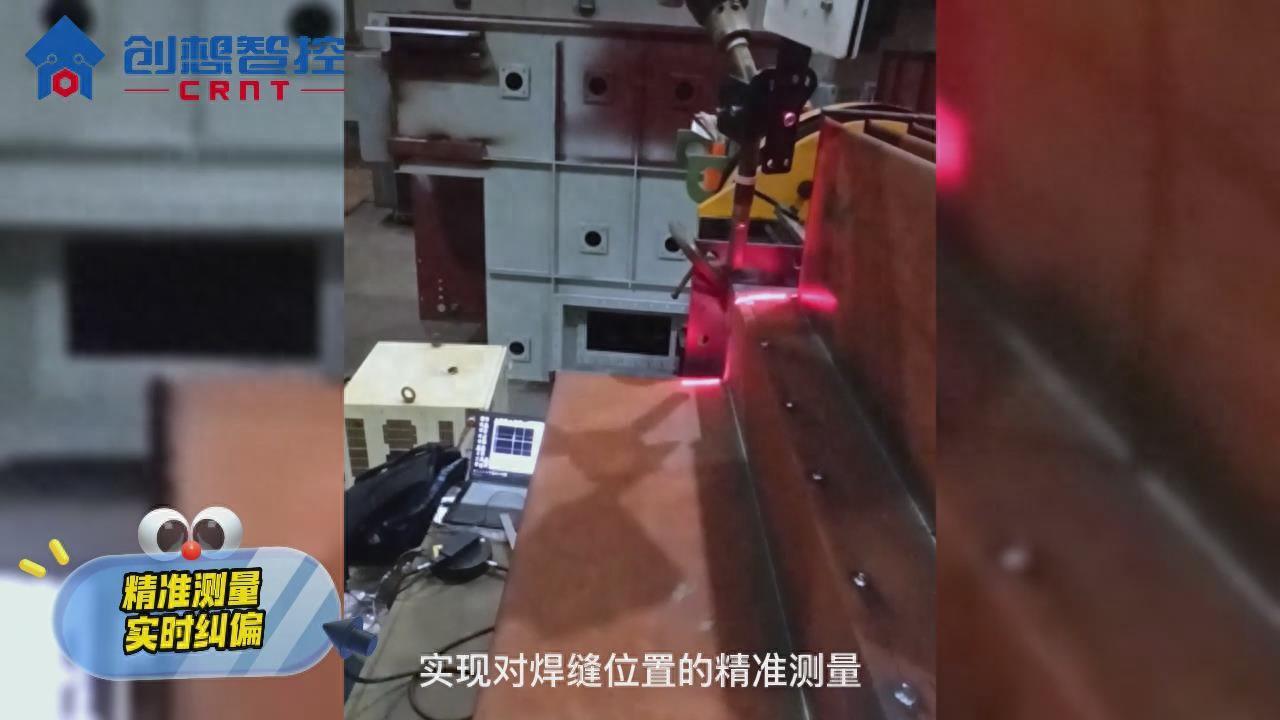
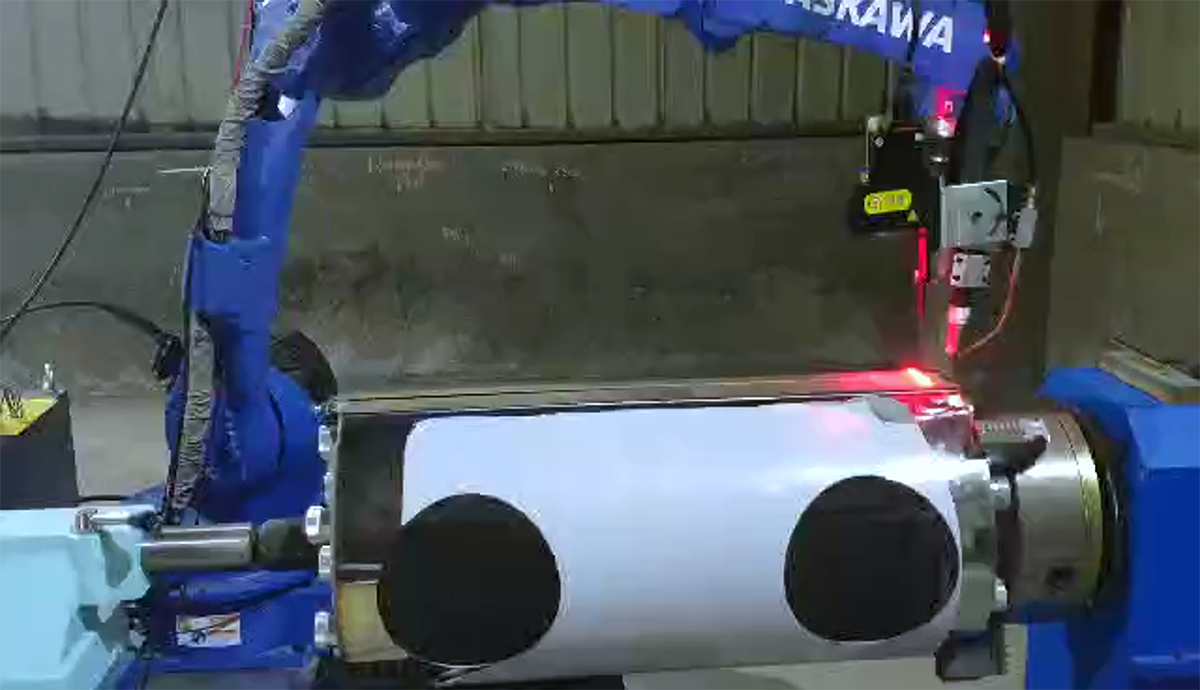
激光焊縫跟蹤傳感器采用激光三角反射式原理,即激光束被放大形成一條激光線投射到被測物體表面上,反射光透過高質量光學系統,被投射到成像矩陣上,經過計算得到傳感器到被測表面的距離(Z軸)和沿著激光線的位置信息(X軸)。移動被測物體或輪廓儀探頭,就可以得到一組三維測量值。所獲得的信息可用于焊縫搜索定位、焊縫跟蹤、自適應焊接參數控制、焊縫成形檢測并將信息實時傳遞到機械手單元,完成各種復雜焊接,避免焊接質量偏差,實現無人化焊接。
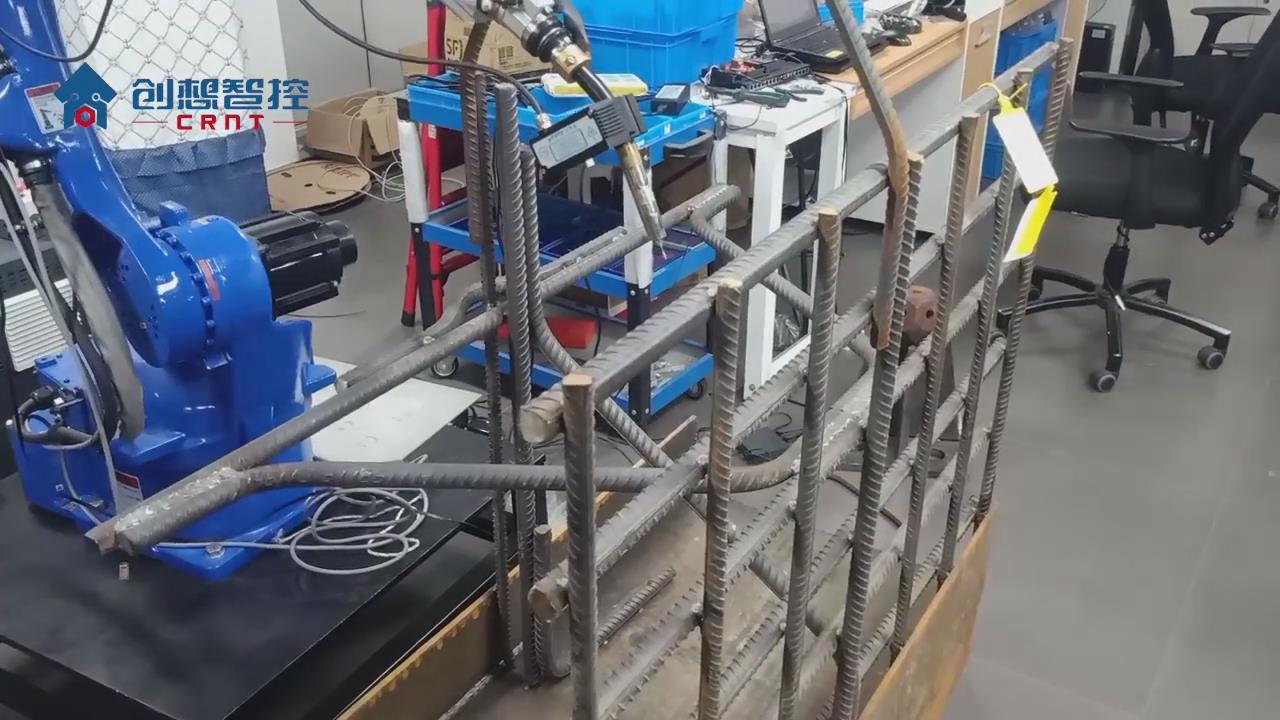
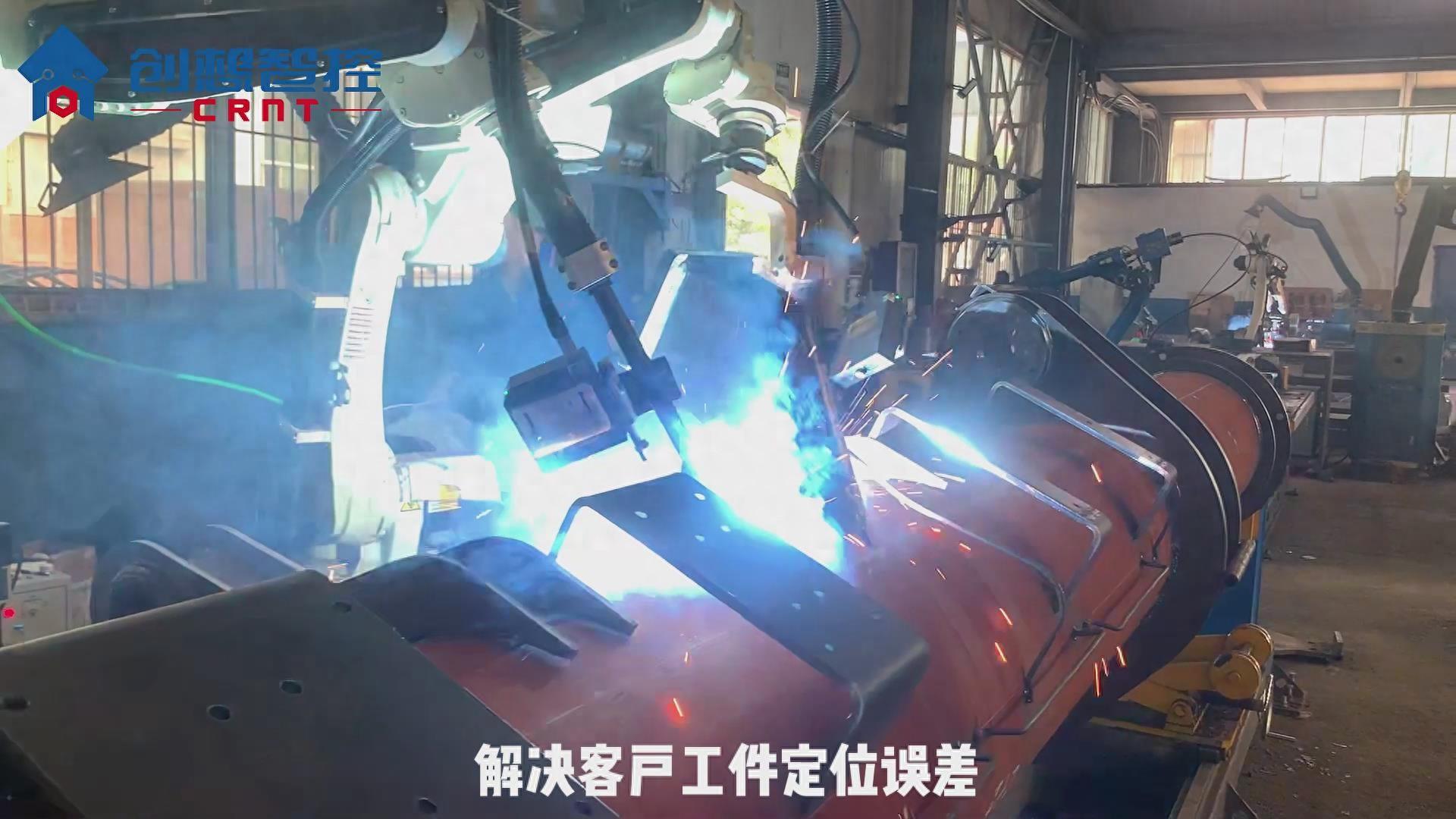
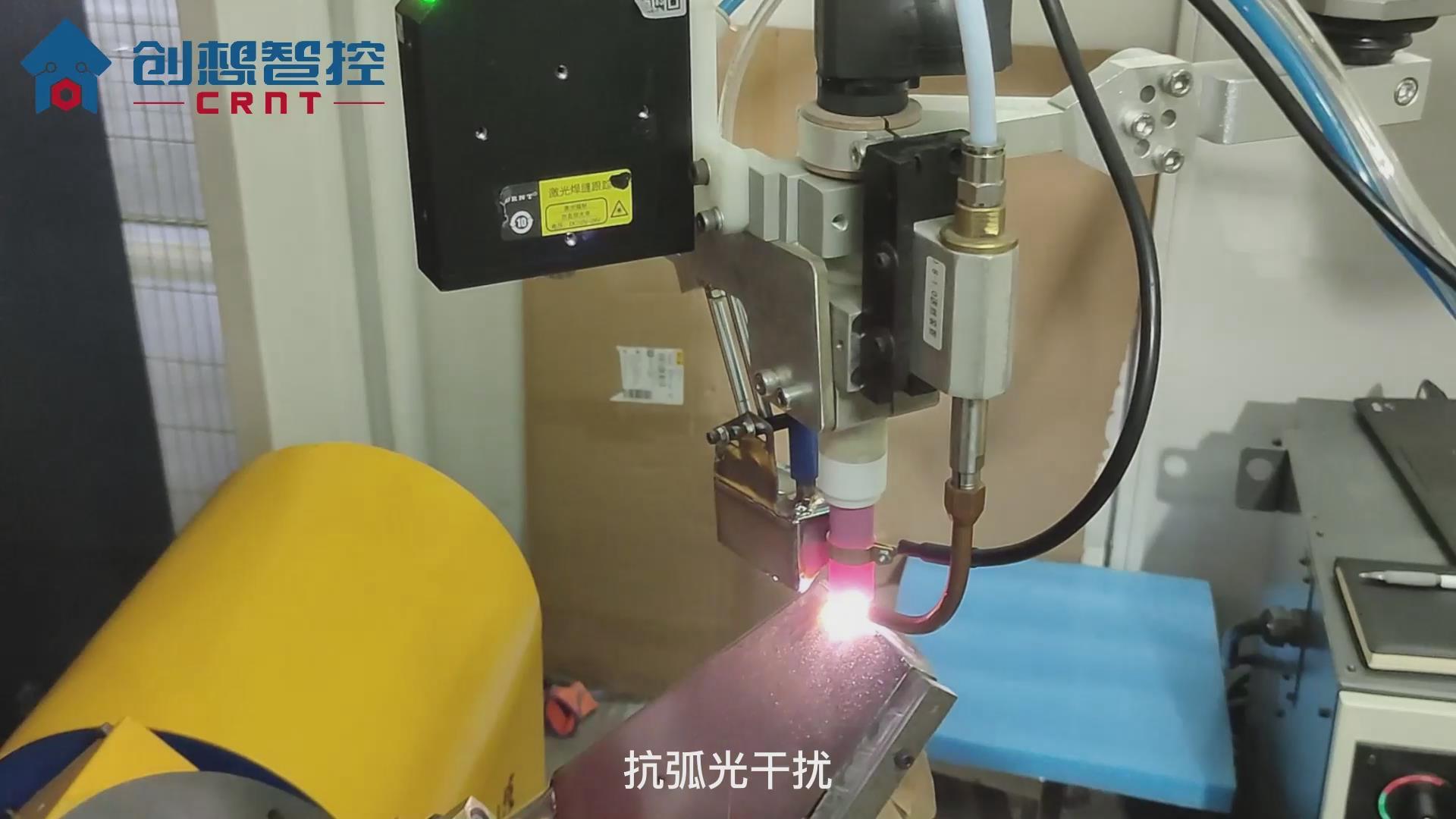
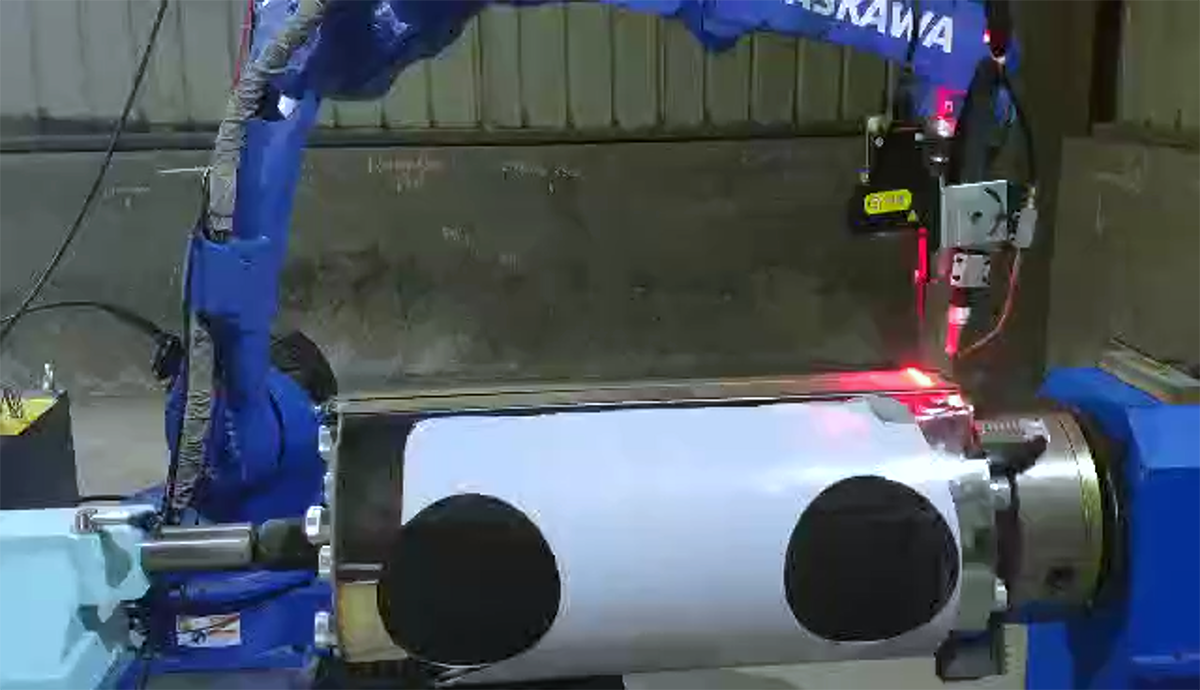
焊縫跟蹤技術功能是在焊接過程中自動檢測并自動調節焊槍的位置,以便于始終跟隨焊接位置進行焊接,焊槍與工件之間的距離始終保持恒定,從而確保焊接質量,提高焊接效率并降低勞動強度。這可以解決工件焊接熱變形、工件不一致引起的焊接質量問題,還可以將焊工從惡劣的環境中解放出來,避免焊工身體傷害。
根據先進制造技術的發展趨勢,結合焊接技術本身的特點,未來對焊縫跟蹤系統的要求是:跟蹤過程高精確化、現場使用可靠、性能穩定、抗干擾性強、環境適應性強及連續工作時間長等優點。未來的焊縫跟蹤系統的檢測部分將以視覺傳感器為主。跟蹤方向及速度的調節將通過對電機的控制來實現,將具有智能性的模糊控制和神經網絡等人工智能手段滲透到焊縫跟蹤控制中,會增強對非先線性系統控制的準確性,使焊接生產過程更具有智能性。
以上就是下面來看看激光焊接的焊縫跟蹤系統介紹。隨著先進制造技術的發展,實現焊接跟蹤的自動化與智能化已成為必然趨勢。未來幾年,激光焊縫跟蹤不僅需要技術更新換代,在應用拓展方面,更需要通過對客戶應用的深入了解,貼近用戶需求,改良產品。
?


























 工商網監
工商網監
評論