我用P-NUCLEO-IHM03開發(fā)板,編碼器接口我用的是J1(霍爾-編碼器接口),但這個接口只有5根線,編碼器有8根,我就用編碼器的A+、B+、Z+和DC+、GND接上了,也不知道對不對,然后
2024-03-20 07:56:22
有一臺異步電機(jī)55KW安裝歐姆龍的差分編碼器CWZ1X,編碼器安裝在軸端托盤架子上,用三條螺栓固定在電機(jī)上,托盤和電機(jī)絕對是同心的,編碼器安裝在托盤中間小軸上,用三個螺絲固定在托盤上,電機(jī)伸出軸端
2024-03-06 17:34:21
?電機(jī)編碼器是一種為自動化控制系統(tǒng)或任何需要位置數(shù)據(jù)的包含電機(jī)的機(jī)器記錄位置數(shù)據(jù)的設(shè)備。從機(jī)械臂到3D打印機(jī),它們無處不在。編碼器在使自主機(jī)器正常運(yùn)行方面發(fā)揮著關(guān)鍵作用。 一、什么是電機(jī)編碼器
2024-02-21 15:39:24 101
101 
編碼器零點位置怎么看 要確定編碼器的零點位置,可以通過以下幾種方式進(jìn)行觀察: 1. 物理標(biāo)記點:一些編碼器在其旋轉(zhuǎn)軸上具有專門的物理標(biāo)記點,例如凹槽或凸起。通過觀察軸上的標(biāo)記點,可以確定零點位置
2024-02-18 18:28:19729 
伺服電機(jī)的編碼器是用來測量電機(jī)轉(zhuǎn)動角度和速度的重要部件。然而,由于長時間運(yùn)行、環(huán)境因素等原因,編碼器可能會出現(xiàn)故障,影響電機(jī)的準(zhǔn)確運(yùn)行。下面將介紹伺服電機(jī)編碼器的故障原因和維修方法,并介紹編碼器
2024-02-14 18:06:003214 電子發(fā)燒友網(wǎng)站提供《永磁同步電機(jī)的矢量控制 帶編碼器的電機(jī)-AB增量型編碼器應(yīng)用指南.pdf》資料免費(fèi)下載
2024-01-30 09:37:46 0
0 伺服電機(jī)編碼器調(diào)零對位是指通過調(diào)整編碼器的零位來使得電機(jī)的位置精準(zhǔn)對位。編碼器是一種能夠?qū)⑽锢砹哭D(zhuǎn)換為電信號的裝置,它可以測量電機(jī)轉(zhuǎn)動的角度或位置。 在進(jìn)行伺服電機(jī)編碼器調(diào)零對位之前,我們首先要
2024-01-25 11:32:08637 編碼器(Encoder)是將輸入數(shù)據(jù)轉(zhuǎn)化為特定編碼表示的一種技術(shù)。對于不同類型的編碼器,評判其好壞可以從多個方面進(jìn)行考量,包括編碼質(zhì)量、速度、模型結(jié)構(gòu)等。 編碼器的原理主要基于自動編碼器
2024-01-23 10:58:07414 伺服電機(jī)編碼器是一種關(guān)鍵的反饋裝置,用于測量和控制電機(jī)的轉(zhuǎn)速和位置。在選擇伺服電機(jī)編碼器時,常常面臨一個選擇:使用磁電編碼器還是光電編碼器。接下來將從幾個關(guān)鍵方面比較這兩種類型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:02464 編碼器是一種將機(jī)械運(yùn)動轉(zhuǎn)換為數(shù)字電信號的傳感器。當(dāng)駕駛員想要控制電機(jī)旋轉(zhuǎn)時,U、V、W三相電氣輸出驅(qū)動電機(jī)運(yùn)行。為了將電機(jī)轉(zhuǎn)到某個位置或角度,我們將此位置稱為目標(biāo)值。我們需要知道此時電機(jī)轉(zhuǎn)動的幅度
2024-01-17 17:02:12326 
伺服電機(jī)的編碼器上每個插針的作用是什么?
2024-01-10 07:49:05
今天公司內(nèi)一臺安川Σ伺服電機(jī)編碼器因為變速箱軸密封出現(xiàn)問題,導(dǎo)致機(jī)油漏進(jìn)伺服電機(jī)尾部的編碼器內(nèi),導(dǎo)致編碼器報錯,伺服不能工作,對于這種情況編碼器能修復(fù)嗎,機(jī)油應(yīng)該是絕緣的。有沒有對于這個情況的維修案例。
伺服電機(jī)問題不大,因為機(jī)油是絕緣的,打開伺服電機(jī)清潔后應(yīng)該就可以使用了。
2024-01-10 07:26:49
請教一下,有一個西門子1PH8電機(jī),型號是1PH8228-1HF40-0BB2-ZK45_A72_MB。這款電機(jī)的編碼器是24V供電,信號是HTL,1024個脈沖的。請問這個編碼器輸出的信號是PNP
2024-01-09 14:50:14
絕對值編碼器用于定位,單方向旋轉(zhuǎn),位置偏差越來越大。
編碼器用來定位,定位是循環(huán)的,不同值對應(yīng)不同位置例:1-2-3-4-1
不同位置錄入不同編碼器數(shù)值。剛才是運(yùn)轉(zhuǎn)幾圈,位置比較準(zhǔn)確,
當(dāng)單方向運(yùn)轉(zhuǎn)好多圈之后,位置偏移越來越大,求大家?guī)兔Ψ治鱿聠栴}所在!!!!
2024-01-09 11:50:55
大家好,我們公司使用數(shù)控磨齒機(jī),但是Y軸電機(jī)編碼器經(jīng)常進(jìn)油,報警Y1軸伺服故障,為此我們新?lián)Q的電機(jī)及編碼器,但是使用幾天后編碼器又進(jìn)油,我們自己找不到進(jìn)油點,把編碼器和電機(jī)連接縫隙用密封膠封死,但是用幾天編碼器還是進(jìn)油,怎么也找不到是如何進(jìn)油的,麻煩大家給幫忙看下,謝謝
2024-01-09 06:42:24
有兩個直流電機(jī),各自有自己的編碼器,脈沖編碼器(1024),此兩個電機(jī)在運(yùn)行時要同時進(jìn)行調(diào)速,并保證速度一致,各自的速度給定,通過按鈕給定的,按一下增加10HZ,最大為50HZ,如果其中一臺編碼器
2024-01-01 08:12:48
電機(jī)加編碼器運(yùn)行2分鐘后,有的自學(xué)習(xí)都過不去,變頻器就會報OC,不加編碼器就不會出現(xiàn)OC。起初還以為是變頻器的問題,換過以后,還是出現(xiàn)OC,編碼器都換過了,總是這樣,小D請大家多幫幫忙。
2023-12-28 07:59:59
伺服電機(jī)的編碼器能否更換?因電機(jī)軸壞,需要拆下加工,故需要把編碼器拆下來!需要注意哪些問題、
2023-12-26 08:18:16
永磁同步伺服電機(jī)無編碼器運(yùn)轉(zhuǎn)怎么實現(xiàn)的
2023-12-25 07:29:35
西門子伺服電機(jī)(型號為:1FK7060-5AF71-1EJ0)編碼器拆下來后,再裝上是否需要調(diào)整編碼器的波形(或者叫編碼器的相位調(diào)整)?
如果需要調(diào)整,請高手指點如果進(jìn)行調(diào)整?
謝謝,急,在線等!
補(bǔ)充:該電機(jī)配810D系統(tǒng),有故障在外單位維修后,回來出現(xiàn)300512和25201號報警。
2023-12-25 07:16:48
編碼器分為旋轉(zhuǎn)編碼器和線性編碼器兩種。旋轉(zhuǎn)編碼器用于檢測旋轉(zhuǎn)位置和速度,而線性編碼器用于檢測直線位置和速度。
2023-12-22 09:20:04380 
通過直流調(diào)速器(590)里的參數(shù)可以知道編碼器的方向,如果反了,將A、B相信號反一下就行了,這是平時我在現(xiàn)場看到別人調(diào)試時這么做的,請問如果沒有直流調(diào)速器,要怎么判斷編碼器的方向呢?
2023-12-21 07:17:04
上次我的文章解釋了所謂的7nm不是真的7nm,是在實際線寬無法大幅縮小的前提下,通過改變晶體管結(jié)構(gòu)的方式縮小晶體管實際尺寸來達(dá)到等效線寬的效果那么新的問題來了:從平面晶體管結(jié)構(gòu)(Planar)到立體
2023-12-19 16:29:01240 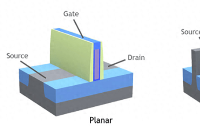
最近使用的有臺帶編碼器的伺服電機(jī)(配著相應(yīng)的伺服驅(qū)動器)漏油,想拆開更換油封,但是聽說伺服電機(jī)拆開自己不能安裝。因為涉及到編碼器的位置。我想問一下:
1.帶編碼器的電機(jī)能拆開嗎?
2.電機(jī)拆開的話
2023-12-15 06:57:52
電機(jī)編碼器報警,更換后會有可能出現(xiàn)的問題有哪些,換的時候注意哪些問題,編碼器零點要是對不上在PCU50上能改嗎?
2023-12-13 07:40:57
1TH7186-2NE33-0CC0這個電機(jī)的編碼器是?
編碼器的訂貨號是?
謝謝1
2023-12-12 08:02:05
數(shù)控機(jī)床中如果發(fā)生電機(jī)或者編碼器壞掉的情況,在更換編碼器和電機(jī)的時候需要注意哪些事情,在機(jī)械方面安裝完成后需要設(shè)置哪些內(nèi)容才可以。
2023-12-12 07:58:34
我們公司伺服電機(jī)出了一次十分奇怪的故障:使用伺服電機(jī)的是上引爐的牽引電機(jī)。
該電機(jī)突然報編碼器通訊故障,無法復(fù)位。當(dāng)斷電重啟后,伺服驅(qū)動器恢復(fù)正常,但當(dāng)其工作十幾分鐘后又出現(xiàn)該故障。檢查線路以及
2023-12-11 06:18:07
我優(yōu)化完電機(jī)的速度環(huán)和電流環(huán)。 用編碼器反饋轉(zhuǎn)電機(jī) 發(fā)現(xiàn)電機(jī)速度反饋不穩(wěn),偏差在2-3個左右。編碼器固定良好。 優(yōu)化出的P225=20 P226=0.159反復(fù)更改225大小,編碼器反饋還是不穩(wěn)。
如何能是速度反饋穩(wěn)定?
2023-11-23 07:42:02
我的問題就是更換編碼器后是否真的需要向編碼器中寫信息,若是大家誰有此軟件和操作步驟呢?
2023-11-22 06:16:27
那么是這樣的話,如果是光柵尺,比如說3米長,光柵尺上的絕對值編碼器上可以找到3米內(nèi)任意位置對應(yīng)的值。
可是電機(jī)的話,電機(jī)可以不停的轉(zhuǎn),就是說距離可以不停的變大,可是電機(jī)上的絕對值編碼器如何找出值一一對應(yīng)這不斷變大(或變小)的位置呢?
2023-11-21 08:30:00
伺服電機(jī)更換編碼器后速度太快
2023-11-17 07:48:42
伺服電機(jī)作為動力源使用時為什么還要再配編碼器?
2023-11-15 07:31:44
西門子伺服電機(jī)更換編碼器,要調(diào)整對齊編碼器,如何對齊呢?
2023-11-15 07:16:43
由于電工接錯線。伺服電機(jī)的編碼器徹底壞了。電機(jī)部分完好。1.5kw@2000rpm。如何用通用矢量變頻器拖動這個廢物?要怎么調(diào)整重要參數(shù)?0到2赫茲會有好的性能嗎?希望最大化發(fā)揮余熱。
2023-11-14 07:31:17
個人用過伺服+絕對值編碼器,也用過變頻+絕對值編碼器,感覺沒什么區(qū)別,首先在連好電纜后在調(diào)試軟件將編碼器型號參數(shù)填好\下載,都是用手動模式移動機(jī)構(gòu)位置,到位后當(dāng)前位置直接標(biāo)零點,零點丟了再重新標(biāo)定。大家有用過這兩種絕對值編碼器的嗎?有區(qū)別嗎?
2023-11-14 06:53:37
嚴(yán)格來講,編碼器只會告訴你改如何定位,要如何執(zhí)行,是需要靠數(shù)控系統(tǒng)(或者PLC或運(yùn)動控制器之類控制器)控制伺服或者步進(jìn)電機(jī)來實現(xiàn)定位的,編碼器好比人的眼睛,知道電機(jī)軸或者負(fù)載處于當(dāng)前某個位置,工業(yè)
2023-11-13 08:07:17868 
旋轉(zhuǎn)編碼器更換步驟第一步,卸開電機(jī)后蓋,編碼器的后蓋。第二步,松開編碼器安裝螺絲。第三步,旋轉(zhuǎn)電機(jī)轉(zhuǎn)子軸,使編碼器轉(zhuǎn)子上的標(biāo)志和編碼器殼上的標(biāo)志重合。第四步,卸下編碼器,注意在裝卸的時候盡量使用特制
2023-11-12 08:07:20756 編碼器種類及原理 常見的編碼器有兩種,分別為霍爾編碼器和GMR編碼器。 1.1 霍爾編碼器 霍爾編碼器圓盤上分布有磁極,當(dāng)圓盤隨電機(jī)主軸轉(zhuǎn)動時,會輸出兩路相位差90°的方波,用這兩路方波可測出電機(jī)
2023-11-10 15:21:47803 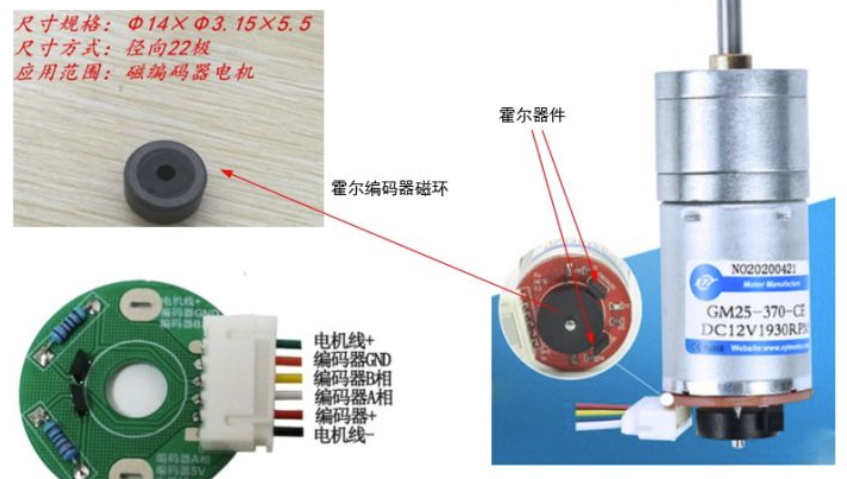
請教一下,西門子電機(jī)通過編碼器信號線把溫度信號傳到編碼器模塊采集,請問這個溫度是測量的哪里的溫度,是線圈溫度嗎?謝謝,現(xiàn)在我用的是一款水冷電機(jī),冷卻水溫度是28度,電機(jī)溫度已達(dá)到65度,還在持續(xù)上升,冷卻水循環(huán)沒問題,正常嗎
2023-11-10 08:23:28
上料小車傳動電機(jī)(自帶編碼器)帶吸盤實現(xiàn)上料控制,小車軌道設(shè)置四個位置實現(xiàn)不同的控制要求。今天更換電機(jī)送電后小車無法實現(xiàn)精確定位,請問更換帶編碼器的電機(jī)后需要做哪些工作才能實現(xiàn)原來設(shè)定位置的精確控制。
哪位大師有編碼器實現(xiàn)位置控制的資料,能不能提供一些作為學(xué)習(xí)參考!!!謝謝!!!
2023-11-10 07:41:01
電機(jī)連著主軸,主軸帶個增量式旋轉(zhuǎn)編碼器,已知編碼器為1600線,主軸直徑為150mm, 主軸為變速轉(zhuǎn)動,變速后面伸出來的軸同樣是150MM后面帶了一個轉(zhuǎn)盤為1M。求:
1、主軸的當(dāng)前時刻轉(zhuǎn)速是多少
2023-11-09 06:17:48
profinet信號編碼器和profibus信號編碼器哪個更好
2023-11-08 13:37:35460 西門子S120伺服電機(jī)的編碼器參考點在什么情況下會丟?
謝謝,因為之前出現(xiàn)了編碼器丟原點的情況,SCOUT中產(chǎn)生了REFERENCE DATA的報警,所以就想問下的,如果重新導(dǎo)入SCOUT的電機(jī)參數(shù)會不會丟原點
2023-11-08 07:08:18
位置、計數(shù)、速度或方向。 ? 為了提高電機(jī)控制性能,將功率逆變器和高性能位置、電流檢測環(huán)路用于功率反饋級是必須的,否則電機(jī)性能和效率很難提高。位置和速度編碼器反饋正是工業(yè)設(shè)備提升性能的關(guān)鍵一環(huán)。 ? 編碼器——提供準(zhǔn)確
2023-11-07 09:10:351944 
西門子伺服驅(qū)動與電機(jī)編碼器連接線最長能達(dá)到多少米?哪位大神做過長距離傳輸?shù)恼堉笇?dǎo)一下!!!!!!
2023-11-07 06:21:50
西門子電機(jī)型號:1FL6042-1AF61-0AA1電源線和編碼器線反著裝是什么原因
如圖電源線和編碼器線一前一后,可以調(diào)換到同一方向嗎
2023-11-06 07:03:49
不太明白帶編碼器的電機(jī)輸出轉(zhuǎn)矩能達(dá)到額定轉(zhuǎn)矩,這個是怎么判斷或設(shè)置的?
2023-11-02 09:59:31
在一體式伺服系統(tǒng)中,編碼器起著關(guān)鍵的作用。 它用于測量伺服電機(jī)的轉(zhuǎn)動位置和速度,并將這些信息傳遞給控制器。 編碼器通常采用光電或磁性原理,將轉(zhuǎn)動角度轉(zhuǎn)換為數(shù)字信號。 在一體式伺服系統(tǒng)中,可以使用兩種
2023-10-23 09:50:02561 
霍爾編碼器和光電編碼器有什么區(qū)別
2023-10-12 08:04:53
15年左右行業(yè)內(nèi)開始掀起風(fēng)磁編碼器替代光電編碼器,而且在22年的時候國內(nèi)幾家磁編發(fā)展迅速取得了很大的成績,可是23年開始隨著光電編碼成本的下調(diào)技術(shù)的革新,又有客戶回歸到用光電的技術(shù)。
是不是現(xiàn)在達(dá)到一個平衡點了?還是說磁編還有突破的空間?
2023-09-26 13:03:43
伺服電機(jī)編碼器原理 伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī)
2023-09-25 14:07:17974 伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī),同步電機(jī)啟動的時候需要
2023-09-22 14:19:58497 編碼器(encoder)是將信號(如比特流)或數(shù)據(jù)進(jìn)行編制、轉(zhuǎn)換為可用以通訊、傳輸和存儲的信號形式的設(shè)備。編碼器把角位移或直線位移轉(zhuǎn)換成電信號,前者稱為碼盤,后者稱為碼尺。按照讀出方式編碼器可以分為
2023-09-22 08:08:551190 直流電機(jī)的無編碼器的功能是什么
2023-09-22 06:12:43
伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上
2023-08-25 08:09:031589 伺服電機(jī)編碼器原理伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī)
2023-08-25 08:08:541016 伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī),同步電機(jī)啟動的時候需要
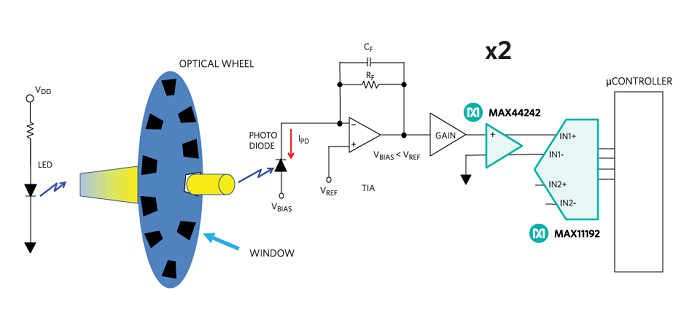
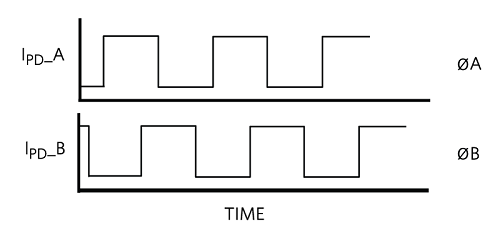
2023-08-23 10:58:11888 從定速電機(jī)轉(zhuǎn)向提供位置和電流反饋的變速電機(jī),不僅可以實現(xiàn)工藝改進(jìn),還能節(jié)省大量能源。本文介紹了電機(jī)編碼器(位置和速度)、器件類型和技術(shù)以及應(yīng)用案例。此外還解答了一些關(guān)鍵問題,例如對特定系統(tǒng)最重
2023-07-31 18:15:02484 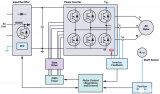
伺服電機(jī)編碼器一般由伺服電機(jī)廠根據(jù)設(shè)計需要確定零位角度,如果后期維修無法確定先前零位,只好自我找零位,這種找零方法比較麻煩。本文將詳細(xì)介紹編碼器中確定零位的方法以及怎樣找零點的過程。
2023-07-26 10:23:047668 我們知道編碼器的種類有很多,什么增量式編碼器、絕對值編碼器、光電編碼器、旋轉(zhuǎn)編碼器等等。
2023-07-13 14:26:194176 
單圈和多圈編碼器是用于測量伺服電機(jī)轉(zhuǎn)動位置的裝置,它們之間的區(qū)別主要在于測量范圍和精度: 單圈編碼器:單圈編碼器只能測量一圈(360度)的轉(zhuǎn)動位置。它通常由光電傳感器或磁性傳感器組成,可以提供較為
2023-07-12 08:15:061294 據(jù)估計,電機(jī)消耗了全球約50%的發(fā)電量,使其成為可持續(xù)性改進(jìn)的明顯目標(biāo),編碼器將在實現(xiàn)這一目標(biāo)方面發(fā)揮關(guān)鍵作用。本博客系列將回答有關(guān)電機(jī)編碼器的一些最常見的問題,涵蓋編碼器技術(shù)(包括相對優(yōu)缺點)、特定應(yīng)用的性能指標(biāo)和規(guī)格、信號鏈電子和電機(jī)控制設(shè)計挑戰(zhàn),并研究一些新興趨勢。
2023-06-27 09:44:15373 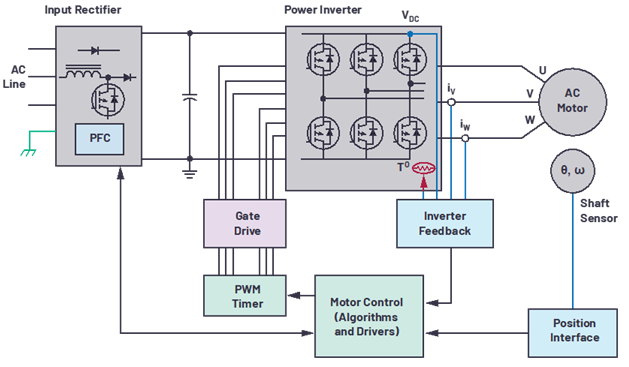
本文章介紹了編碼器為閉環(huán)控制電機(jī)應(yīng)用帶來的好處,并探討了光學(xué)和磁性換能器的相對優(yōu)缺點。介紹了關(guān)鍵的編碼器指標(biāo),并展示了如何在機(jī)器人拾取和放置應(yīng)用程序中指定編碼器的性能級別。
2023-06-27 09:43:10375 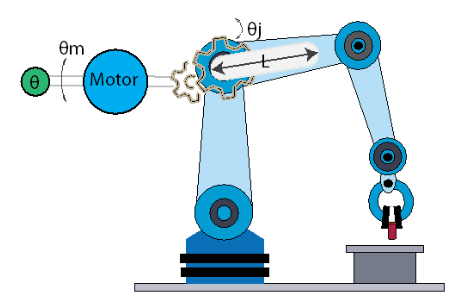
伺服電機(jī)編碼器 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2023-06-26 14:01:01899 從具有位置和電流反饋的定速電機(jī)轉(zhuǎn)向具有位置和電流反饋的變速電機(jī),為節(jié)省大量工藝和能源提供了一條途徑。本文概述了電機(jī)編碼器(位置和速度),包括類型和技術(shù)以及應(yīng)用用例。它還回答了關(guān)鍵問題,例如哪些編碼器
2023-06-15 09:55:05726 
在選擇伺服電機(jī)編碼器時,需要考慮多個因素,例如精度、分辨率、速度、穩(wěn)定性、可靠性等。以下是一些常見的伺服電機(jī)編碼器類型及其特點: (1)光電編碼器:光電編碼器具有高精度、高分辨率、高速度等特點
2023-06-09 08:20:02775 三相異步電機(jī)加裝編碼器 電動機(jī)不能直接帶動編碼器。因為編碼器是個較為精密的儀器,速度不能太快。正確的方法是與減速機(jī)(牙箱)通過聯(lián)軸器相連接,編碼器的電壓一般是5--30VDC,編碼器可輸出三相
2023-05-25 16:52:101615 伺服編碼器是工業(yè)機(jī)器人技術(shù)核心伺服電機(jī)的必配,對于伺服電機(jī)性能乃至機(jī)器人性能的作用極為關(guān)鍵。
2023-05-25 11:35:342563 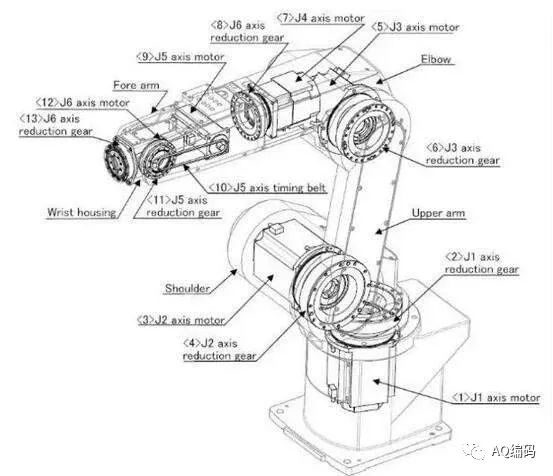
光電編碼器測量電機(jī)轉(zhuǎn)速的方法有哪些?可以通過定時器/計數(shù)器根據(jù)光電編碼器的輸出脈沖信號測量電機(jī)的轉(zhuǎn)速。 具體的速度方法有m法、t法、M/T法3種。一、m法也稱為頻率測量法,其速度原理是在規(guī)定的檢測
2023-05-25 10:19:20
編碼器種類及型號:最常見的編碼器類型是旋轉(zhuǎn)編碼器和線性編碼器。旋轉(zhuǎn)編碼器通常用于測量機(jī)器人的關(guān)節(jié)位置,以及測量車輛和船只的轉(zhuǎn)向角度。線性編碼器通常用于測量運(yùn)動平臺的位置和速度。旋轉(zhuǎn)編碼器和線性編碼器可以分為絕對式和增量式編碼器。絕對式編碼器可以直接讀取位置信息,而增量式編碼器則需要計算位置信息。
2023-05-18 11:15:003455 
編碼器是什么?編碼器有哪些分類及應(yīng)用;編碼器是什么?在數(shù)字信號處理和通信系統(tǒng)中,編碼器是一種重要的設(shè)備,用于將原始數(shù)據(jù)轉(zhuǎn)換為字符序列或二進(jìn)制碼序列。編碼器是一種可以同時測量物體位置和方向的蒿精度
2023-05-18 11:08:473133 
編碼器廠家; 編碼器是一種用于測量電機(jī)或電動機(jī)的移動位置、速度和方向的設(shè)備。在現(xiàn)代工業(yè)自動化中,編碼器被廣泛應(yīng)用于機(jī)器人、CNC機(jī)床、印刷機(jī)等機(jī)械設(shè)備中。隨著市場對生產(chǎn)效率的要求越來越高,編碼器成為
2023-05-18 11:08:045269 
編碼器(encoder)是將信號(如比特流)或數(shù)據(jù)進(jìn)行編制、轉(zhuǎn)換為可用以通訊、傳輸和存儲的信號形式的設(shè)備。編碼器把角
位移或直線位移轉(zhuǎn)換成電信號,前者稱為碼盤,后者稱為碼尺。(對于電機(jī)測速來說應(yīng)該
2023-05-16 16:27:272 STM32 Cubemax(七) —— 單級PID控制帶編碼器的直流減速電機(jī)速度目錄 STM32 Cubemax(七) —— 單級PID控制帶編碼器的直流減速電機(jī)速度 文章目錄 前言 一、PID控制
2023-05-16 15:51:553 增量型編碼器與絕對值型編碼器怎么選擇?在進(jìn)行編碼器選擇時,增量型編碼器和絕對值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點
2023-05-08 11:28:331340 
的手動狀態(tài)是預(yù)處理與編碼器流水線化,只能與 H1 一起使用。這正是我的用例。
數(shù)據(jù)表 (IMX8MMCEC) 沒有提及在某些 i.XM8M Mini 上禁用縮小比例,而在其他情況下則沒有。
我試圖忽略
2023-05-04 09:02:00
,無需記憶,需找參考點,而且不用一直計數(shù),什么時候需要知道位置,什么時候就去讀取它的位置。2、工作原理不同:絕對編碼器光碼盤上有許多道光通道刻線,每道刻線依次以2線、4線、8線、16線編排,這樣
2023-04-20 16:19:54
有沒有編碼器結(jié)構(gòu)是區(qū)別于伺服系統(tǒng)和普通電機(jī)的第一要素,它可以讓電機(jī)實現(xiàn)閉環(huán)控制,讓其有更高的控制精度,應(yīng)對更為苛刻的控制項目。目前,最為常見的伺服編碼器主要有增量式和絕對值式兩大類,它們的不同在
2023-04-12 09:05:025850 伺服電機(jī)應(yīng)用時必須要有編碼器和測速器嗎?PID控制的反饋是什么?
2023-03-30 16:47:47
是Hz。計算公式為: 最大響應(yīng)頻率= 分辨率* 軸轉(zhuǎn)速/60 例如某電機(jī)的編碼器的分辨率為100(即光電碼盤一圈有100條柵格),軸轉(zhuǎn)速為120轉(zhuǎn)每分鐘(即每秒轉(zhuǎn)2圈),則響應(yīng)頻率為100*120
2023-03-30 14:57:12
變頻電機(jī)可以不接編碼器,直接控制電機(jī)么?如果可以的話,控制原理是什么?謝謝!補(bǔ)充下,是變頻器直接控制電機(jī),達(dá)到調(diào)速的問題,可以么?
2023-03-28 16:37:02
隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識一下絕對編碼器與增量編碼器。
2023-03-28 09:33:31704 隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識一下絕對編碼器與增量編碼器。
2023-03-28 09:27:19551
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論