CAN轉(zhuǎn)串口轉(zhuǎn)換器在汽車(chē)行業(yè)中具有廣泛的應(yīng)用。
2024-02-20 16:18:03 756
756 這意味著變送器通過(guò)CAN收發(fā)器改變總線電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線。接收器通過(guò)監(jiān)測(cè)總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54605 
找到CAN總線(故障)節(jié)點(diǎn)的三種辦法? CAN總線是現(xiàn)代汽車(chē)電子系統(tǒng)中常見(jiàn)的通信協(xié)議,用于車(chē)載電子設(shè)備之間的數(shù)據(jù)傳輸。在汽車(chē)的CAN總線系統(tǒng)中,每個(gè)節(jié)點(diǎn)都扮演著重要的角色。然而,由于各種原因,有時(shí)候
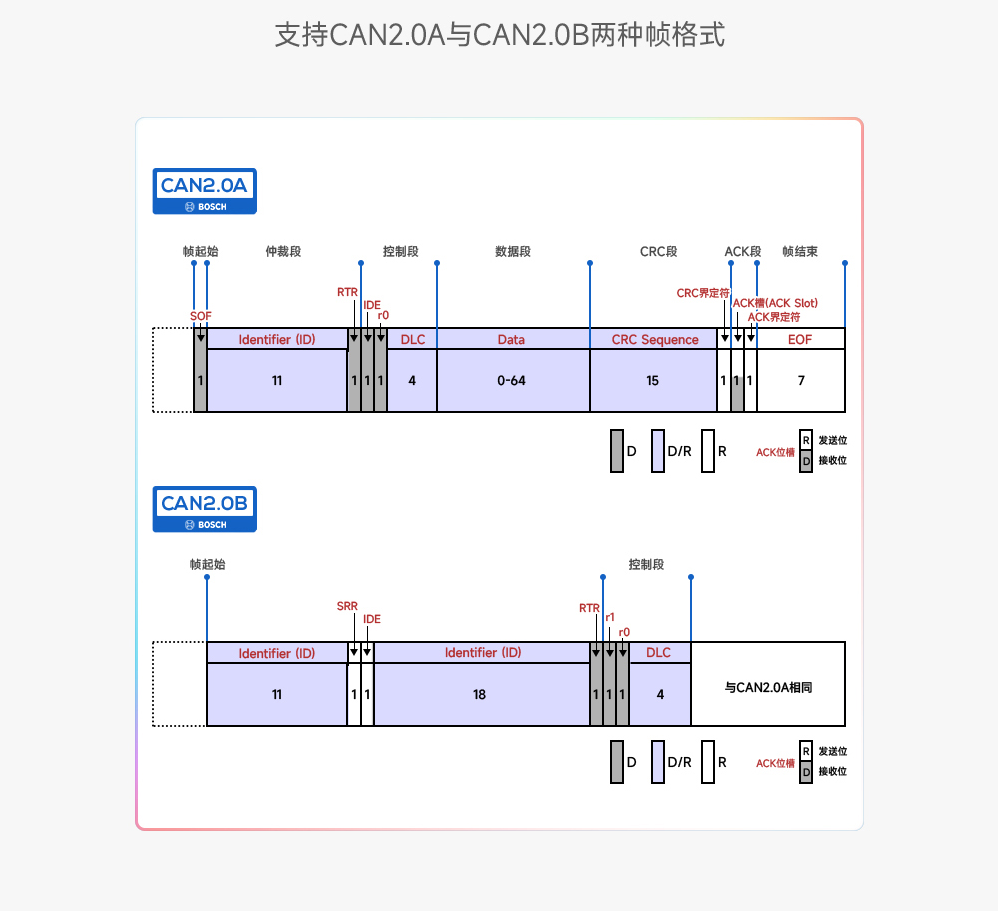
2024-02-02 10:35:10457 總線的特性。 首先,高速CAN總線是指數(shù)據(jù)傳輸速率較高的CAN總線,其中包括CAN 2.0A和CAN 2.0B兩種協(xié)議。CAN 2.0A支持11位標(biāo)準(zhǔn)幀和29位擴(kuò)展幀,最大傳輸速率可達(dá)到1 Mbps
2024-01-31 14:09:01496 請(qǐng)問(wèn)用CAN存儲(chǔ)器存儲(chǔ)的CAN總線數(shù)據(jù)幀格式有哪些呢? CAN總線是一種常用于汽車(chē)、工業(yè)控制和其他應(yīng)用領(lǐng)域的串行通信協(xié)議。在CAN總線中,數(shù)據(jù)通過(guò)數(shù)據(jù)幀的形式進(jìn)行傳輸。數(shù)據(jù)幀包含了發(fā)送節(jié)點(diǎn)和接收節(jié)點(diǎn)
2024-01-31 13:46:38313 CAN總線協(xié)議是一種串行通訊協(xié)議,主要用于汽車(chē)和工業(yè)自動(dòng)化領(lǐng)域,實(shí)現(xiàn)了實(shí)時(shí)應(yīng)用的需求。 首先,CAN總線協(xié)議的基本概念包括報(bào)文、信息路由和位速率。在CAN系統(tǒng)中,總線上傳輸?shù)男畔⒁圆煌袷降膱?bào)文發(fā)送
2024-01-19 17:47:57275 一文檔介紹本文將一步步介紹如何使用DSLogic邏輯分析儀采集并分析CAN/CAN-FD信號(hào),因?yàn)?b class="flag-6" style="color: red">CAN信號(hào)的測(cè)量和CAN-FD的大致一樣,所以下文以CAN-FD舉例,在有區(qū)別之處,將會(huì)做特別
2024-01-08 14:54:05176 
CAN總線共模電感是應(yīng)用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問(wèn)題。本文將詳細(xì)介紹CAN總線共模電感的定義、作用、選型要點(diǎn)以及常見(jiàn)注意事項(xiàng),并且結(jié)合實(shí)際案例進(jìn)行分析
2024-01-05 13:42:34748 的比較。 首先,我們來(lái)了解一下CAN總線的基本概念。CAN總線是一種常用的數(shù)字串行通信協(xié)議,廣泛應(yīng)用于汽車(chē)和工業(yè)控制系統(tǒng)中。它具有高可靠性、抗干擾能力強(qiáng)、傳輸速率高等優(yōu)點(diǎn),因此被廣泛應(yīng)用于車(chē)載通信、工業(yè)自動(dòng)化、機(jī)器人控制等領(lǐng)域。 在
2024-01-04 16:59:25805 CAN通信的完美編程需要對(duì)CAN的通信負(fù)載及通信質(zhì)量進(jìn)行監(jiān)控:
CAN通信實(shí)時(shí)負(fù)載小于標(biāo)定負(fù)載的1/3,通過(guò)對(duì)CAN通信的丟包的監(jiān)控來(lái)評(píng)估CAN的通信質(zhì)量;
1. 概述:
CANWeb現(xiàn)場(chǎng)總線結(jié)合
2023-12-28 11:02:58
了解CAN總線網(wǎng)絡(luò)和PROFINET網(wǎng)絡(luò)的基本概念。CAN(控制器局域網(wǎng))總線網(wǎng)絡(luò)是一種用于實(shí)時(shí)控制的串行通信協(xié)議,具有高速、高可靠性、抗干擾能力強(qiáng)等特點(diǎn)。在生產(chǎn)自動(dòng)化領(lǐng)域,CAN總線網(wǎng)絡(luò)廣泛應(yīng)用于各種
2023-12-25 10:29:17
CAN總線通訊協(xié)議由德國(guó)博世于上世紀(jì)80年代發(fā)明,第一個(gè)使用CAN總線通訊協(xié)議的量產(chǎn)車(chē)型是1991年的奔馳S級(jí)轎車(chē),至今CAN總線依舊是車(chē)內(nèi)主要的通訊總線。隨著汽車(chē)電子智能化加速,CAN總線也開(kāi)始
2023-12-21 14:03:45663 
工作環(huán)境和條件下穩(wěn)定運(yùn)行。 (2)適應(yīng)性和兼容性:CAN總線分析儀通常支持多種CAN協(xié)議和通信速率,并具備與不同車(chē)輛和設(shè)備的兼容性。這使得它們能夠適應(yīng)不同的應(yīng)用場(chǎng)景和需求,長(zhǎng)期使用而不會(huì)輕易淘汰。 (3)軟件和固件升級(jí):CAN總線分析儀的
2023-12-15 16:30:02153 CAN轉(zhuǎn)光纖轉(zhuǎn)換器是一種用于將CAN總線信號(hào)轉(zhuǎn)換為光纖信號(hào)的設(shè)備。它可以將CAN信號(hào)以更快的速度和更長(zhǎng)的距離傳輸?shù)狡渌O(shè)備,從而提高系統(tǒng)的傳輸效率。本文將詳細(xì)介紹CAN轉(zhuǎn)光纖轉(zhuǎn)換器的工作原理,以及它的優(yōu)點(diǎn)。
2023-12-15 13:22:00425 無(wú)錫耐特森MCN-EICN 是自主研發(fā)的一款 ETHERNET/IP 從站功能的通訊網(wǎng)關(guān)。該產(chǎn)品主要功能是將各種 CAN 總線和 ETHERNET/IP 網(wǎng)絡(luò)連接起來(lái)。EthernetIP轉(zhuǎn)CAN
2023-12-12 16:59:19
無(wú)錫耐特森MCN-ECCAN是自主研發(fā)的一款 ETHERCAT 從站功能的通訊網(wǎng)關(guān)。該產(chǎn)品主要功能是將各種 CAN 總線和 ETHERCAT 網(wǎng)絡(luò)連接起來(lái)。ETHERCAT轉(zhuǎn)CAN網(wǎng)關(guān)
2023-12-12 16:34:04
又想結(jié)合代碼,測(cè)試我們的CAN通信功能,那么本文將介紹使用邏輯分析儀工具來(lái)協(xié)助測(cè)試。
CAN通信介紹
CAN通信是一種異步通訊協(xié)議,只具有CAN_High和CAN_Low兩條信號(hào)線,共同構(gòu)成一組差分信
2023-12-11 22:57:27
Modbus協(xié)議的消息解析為原始數(shù)據(jù),例如傳感器/執(zhí)行器的狀態(tài)或PLC的指令。2. 消息轉(zhuǎn)換:將原始數(shù)據(jù)轉(zhuǎn)換為CANopen協(xié)議的消息,以便在CAN總線上傳輸。
軟件實(shí)現(xiàn)Modbus轉(zhuǎn)
2023-12-08 17:02:59
CAN是ControllerAreaNetwork的縮寫(xiě)(以下稱為CAN),是ISO*1國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在當(dāng)前的汽車(chē)產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性、低公害、低成本的要求,各種各樣
2023-12-08 15:51:13236 
高速can和低速can區(qū)別? 高速CAN和低速CAN是現(xiàn)今汽車(chē)行業(yè)中常用的兩種CAN總線通信協(xié)議。CAN,也被稱為Controller Area Network(控制器局域網(wǎng)絡(luò)),是一種用于在車(chē)
2023-12-07 18:15:362320 can總線傳輸距離? CAN總線是一種串行通信協(xié)議,常用于汽車(chē)行業(yè)中的數(shù)據(jù)通信。它被廣泛應(yīng)用于車(chē)載電子系統(tǒng),如發(fā)動(dòng)機(jī)控制單元、制動(dòng)系統(tǒng)、儀表盤(pán)和空調(diào)控制系統(tǒng)等。CAN總線的主要優(yōu)勢(shì)在于其高可靠性
2023-12-07 18:09:401213 CAN總線為什么有兩個(gè)終端電阻,作用是什么? CAN總線是一種常用的串行通信協(xié)議,廣泛應(yīng)用于汽車(chē)、工控、航空等領(lǐng)域。在CAN總線中,存在兩個(gè)終端電阻,即CAN總線的兩端各有一個(gè)120歐姆的電阻
2023-12-07 11:15:351460 電壓分別3.5V和1.5V,即壓差為2V,經(jīng)過(guò)收發(fā)器轉(zhuǎn)換,MCU則可通過(guò)CAN_Rx讀取到信號(hào)0。
通信的整個(gè)過(guò)程
空閑狀態(tài)
在CAN協(xié)議中,當(dāng)總線上的上出現(xiàn)連續(xù)的11位隱性電平(兩根線電壓差小于0.5V
2023-12-05 10:45:42
電壓分別3.5V和1.5V,即壓差為2V,經(jīng)過(guò)收發(fā)器轉(zhuǎn)換,MCU則可通過(guò)CAN_Rx讀取到信號(hào)0。
通信的整個(gè)過(guò)程
空閑狀態(tài)
在CAN協(xié)議中,當(dāng)總線上的上出現(xiàn)連續(xù)的11位隱性電平(兩根線電壓差小于0.5V
2023-12-04 14:47:44
請(qǐng)問(wèn)usb can收發(fā)器是否能和CAN FD總線搭配使用呢? USB-CAN收發(fā)器是一種使用USB接口連接計(jì)算機(jī)和CAN總線之間的硬件設(shè)備。CAN總線是一種廣泛應(yīng)用于汽車(chē)、工業(yè)自動(dòng)化等領(lǐng)域的通信協(xié)議
2023-11-22 16:37:51342 CAN 總線入門(mén):學(xué)習(xí) CAN 總線,了解 CAN 總線原理、數(shù)據(jù)格式。我公司的 USBCAN\CANalyst-II 分析儀都是雙通道產(chǎn)品,兩個(gè)通道可以直接組網(wǎng),通道之間可以相互收發(fā)數(shù)據(jù),不用接入其他設(shè)備就可以實(shí)現(xiàn) CAN 數(shù)據(jù)的收發(fā)。
2023-11-16 17:04:42 2
2 CAN總線 CAN是控制器局域網(wǎng)絡(luò)的簡(jiǎn)稱,是一種能夠?qū)崿F(xiàn)分布式實(shí)時(shí)控制的串行通信網(wǎng)絡(luò)。CAN總線的功能復(fù)雜且智能。 CAN總線網(wǎng)絡(luò)主要掛在CAN_H和CAN_L,各個(gè)節(jié)點(diǎn)通過(guò)這兩條線實(shí)現(xiàn)信號(hào)的串行
2023-11-09 18:11:50654 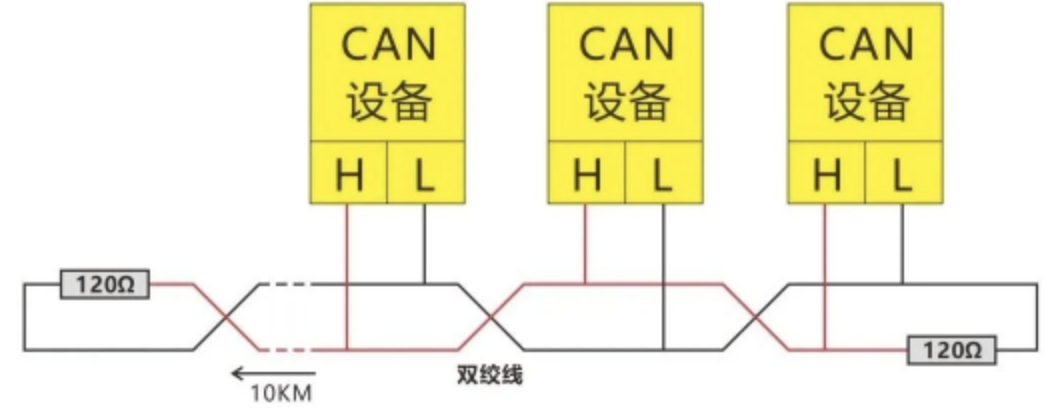
CAN(Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議用于汽車(chē)中各種不同元件之間的通信,以此取代昂貴而笨重的配電線束。
2023-11-01 16:39:54512 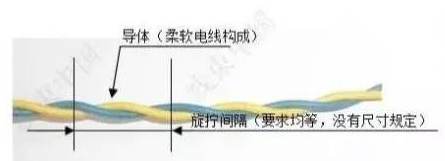
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-10-31 18:30:00437 
(7)USB CAN協(xié)議分析儀 這些別名主要是為了描述設(shè)備的功能和應(yīng)用領(lǐng)域,但它們通常指的是相同類型的設(shè)備。 如果您需
2023-10-28 16:20:02307 
CAN協(xié)議棧 汽車(chē)CAN協(xié)議棧是一種軟件組件,用于實(shí)現(xiàn)汽車(chē)電子系統(tǒng)中的CAN總線通信功能。它包含了一系列的功能軟件,用于處理CAN總線的物理層和數(shù)據(jù)鏈路層的通信協(xié)議。 汽車(chē)CAN協(xié)議棧的功能軟件主要
2023-10-27 16:16:541511 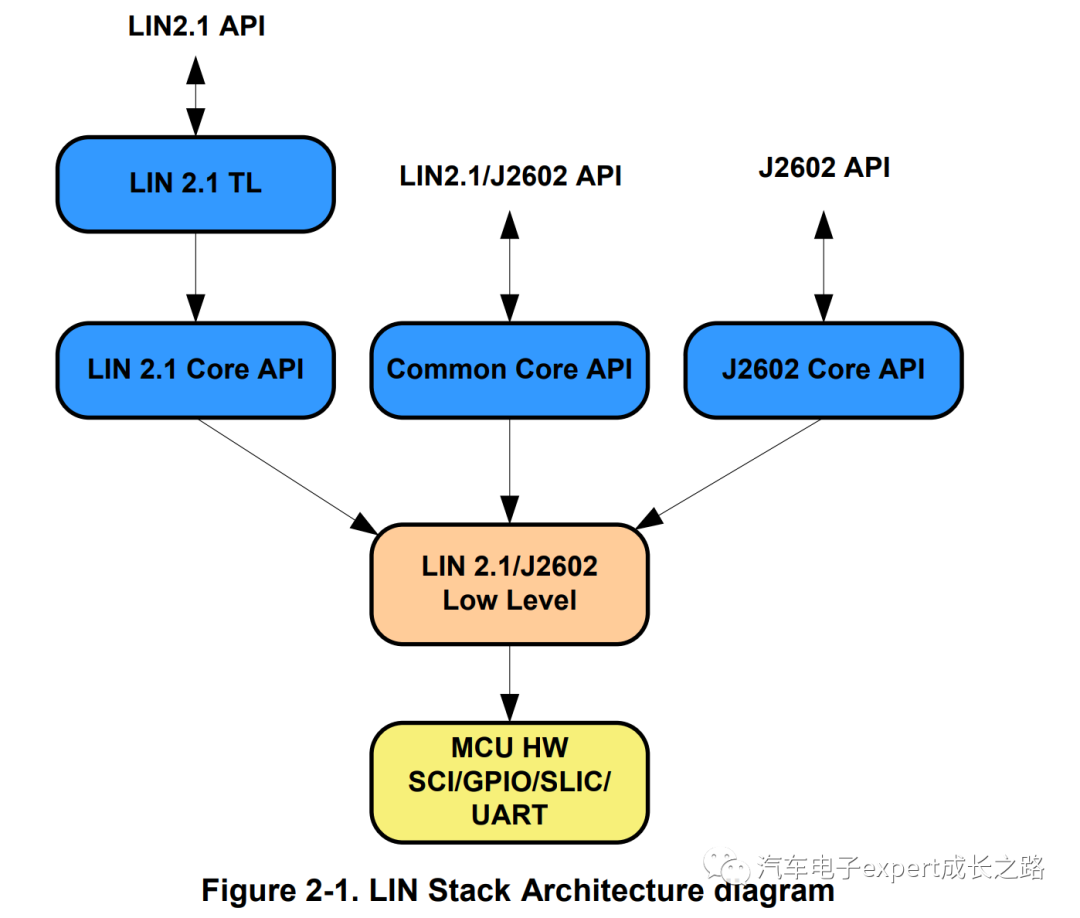
CAN控制器根據(jù)兩根線上的電位差來(lái)判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發(fā)送方通過(guò)使總線電平發(fā)生變化,將消息發(fā)送給接收方。 顯性電平對(duì)應(yīng)邏輯 0,CAN_H 和 CAN
2023-10-27 14:55:281008 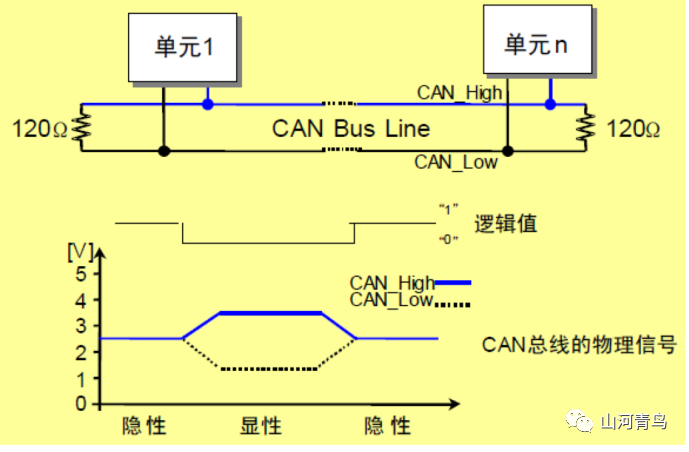
CAN/Lerf總線分析儀
2023-10-23 11:47:27

電子發(fā)燒友網(wǎng)站提供《基于CAN總線的智能節(jié)點(diǎn)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-20 14:44:320 本資料是面向CAN總線初學(xué)者的CAN入門(mén)書(shū)。對(duì)CAN是什么、CAN的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN的概要及CAN的協(xié)議進(jìn)行了說(shuō)明。
2023-10-16 15:29:113 YC-CAN-RTU是一款用于CAN-Modbus現(xiàn)場(chǎng)總線與RS-232總線或RS-485總線之間數(shù)據(jù)轉(zhuǎn)換的協(xié)議型轉(zhuǎn)換器,支持標(biāo)準(zhǔn)Modbus RTU協(xié)議。
2023-10-15 10:30:09449 
電子發(fā)燒友網(wǎng)站提供《CAN232MB智能協(xié)議轉(zhuǎn)換器用戶手冊(cè).pdf》資料免費(fèi)下載
2023-10-13 14:11:440 電子發(fā)燒友網(wǎng)站提供《GY850X CAN232MB/CAN485MB/CAN422MB CAN總線協(xié)議轉(zhuǎn)換器 .pdf》資料免費(fèi)下載
2023-10-13 10:31:281 怎么用示波器看can總線信號(hào)?? CAN總線是一種高速、可靠的控制器局域網(wǎng)絡(luò),常被用于汽車(chē)、航空等領(lǐng)域。在調(diào)試和故障排查時(shí),我們可以使用示波器來(lái)監(jiān)測(cè)CAN總線的信號(hào)。以下是如何使用示波器來(lái)看CAN
2023-10-11 17:19:303258 電子發(fā)燒友網(wǎng)站提供《基于ARM和智能手機(jī)的藍(lán)牙CAN分析儀設(shè)計(jì)原理.pdf》資料免費(fèi)下載
2023-10-11 15:00:280 電子發(fā)燒友網(wǎng)站提供《基于LPC2292的CAN總線USB接口適配器的設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-09 16:53:191 9月14日,虹科首席工程師陳皓受邀在CiA中國(guó)技術(shù)日發(fā)表“CAN和CAN FD總線協(xié)議轉(zhuǎn)換”為主題的演講,內(nèi)容包括CAN和CAN FD總線的區(qū)別、兩種總線協(xié)議轉(zhuǎn)化的基本原理及其在汽車(chē)行業(yè)的應(yīng)用與展望。本文邀您共同“劃重點(diǎn)”,回顧本次演講,干貨多多,不容錯(cuò)過(guò)!
2023-09-21 09:30:40336 
usb邏輯分析儀怎么用 USB邏輯分析儀是一種用于分析USB設(shè)備和主機(jī)之間通信的工具。它能夠監(jiān)視USB的數(shù)據(jù)傳輸,捕獲和解碼USB的通信信號(hào),對(duì)USB接口進(jìn)行調(diào)試,并以便捷的方式檢測(cè)出USB環(huán)境
2023-09-19 16:03:471220 YC-MDCAN-001 是一款有源RS-232/485 到CAN_BUS 總線的轉(zhuǎn)換器,是遠(yuǎn)創(chuàng)科技公司為了解決RS-232/485串口設(shè)備與CAN_BUS 設(shè)備之間的數(shù)據(jù)通信而專業(yè)
2023-09-19 14:50:56390 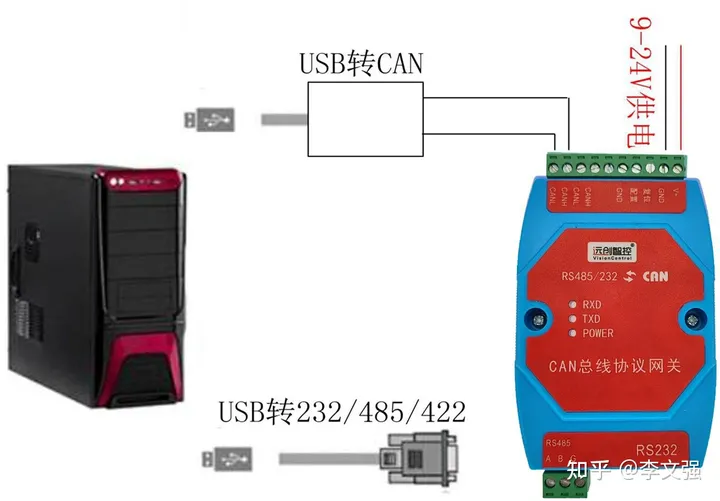
接口進(jìn)行互相轉(zhuǎn)換,以滿足不同的通信需求。本文將從以下幾個(gè)方面介紹CAN與RS-485接口的互相轉(zhuǎn)換: 1. CAN總線和RS-485總線的基本概念 CAN總線是一種串行通信協(xié)議,采用差分信號(hào)傳輸,支持多主機(jī)多從機(jī)的通信結(jié)構(gòu),具有廣泛的應(yīng)用范圍。CAN總線協(xié)議構(gòu)成包括物理層、數(shù)據(jù)
2023-09-14 17:52:512858 應(yīng)用中,需要將CAN和RS485這兩種串口協(xié)議進(jìn)行轉(zhuǎn)換,實(shí)現(xiàn)數(shù)據(jù)的互通。 CAN 轉(zhuǎn) 485 的基本原理 CAN 和 RS485 之間的轉(zhuǎn)換需要借助于專用的CAN轉(zhuǎn)485轉(zhuǎn)換器。CAN和RS485之間
2023-09-14 17:52:431160 can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車(chē)、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:053598 1、CAN總線的常見(jiàn)故障 CAN總線錯(cuò)誤分析與解決 當(dāng)CAN總線出現(xiàn)故障或數(shù)據(jù)傳輸異常時(shí),往往會(huì)出現(xiàn)多種奇怪的故障現(xiàn)象,如儀表板顯示異常,車(chē)輛無(wú)法啟動(dòng),啟動(dòng)后無(wú)法熄滅,車(chē)輛動(dòng)力性能下降,某些電控系統(tǒng)
2023-09-14 16:30:071594 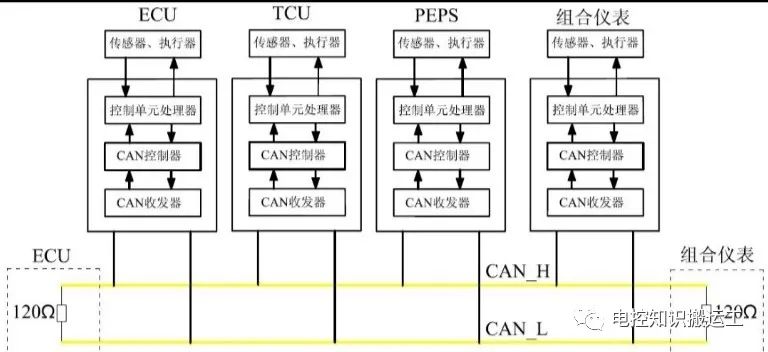
在CAN總線上,利用CAN_H和CAN_L兩根線上的電位差來(lái)表示CAN信號(hào)。
2023-09-13 09:42:28282 
CAN總線通常由兩根線組成:CAN-High(CAN-H)和CAN-Low(CAN-L),也稱為CAN-H線和CAN-L線,這兩根線呈對(duì)稱排列。CAN總線使用差分信號(hào)的方式進(jìn)行通信,通過(guò)在CAN-H和CAN-L線之間傳輸電壓差來(lái)表示數(shù)據(jù)和控制信號(hào)。
2023-09-12 14:59:293906 AUTOSAR CAN 網(wǎng)絡(luò)管理是一個(gè)獨(dú)立于硬件的協(xié)議,只能在 CAN 上使用。它的主要目的是協(xié)調(diào)網(wǎng)絡(luò)的正常運(yùn)行和總線休眠模式之間的轉(zhuǎn)換。
2023-09-09 10:32:202129 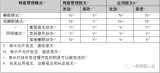
can總線負(fù)載率怎么計(jì)算? CAN總線是指控制器局域網(wǎng),是一種實(shí)時(shí)性能極高的網(wǎng)絡(luò)協(xié)議,廣泛應(yīng)用于汽車(chē)、工業(yè)控制、醫(yī)療儀器等領(lǐng)域。在CAN總線網(wǎng)絡(luò)設(shè)計(jì)中,總線負(fù)載率是一個(gè)非常重要的指標(biāo),它能夠幫助
2023-09-07 15:05:452581 can總線負(fù)載率多少合理? CAN總線是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進(jìn)行通信的技術(shù)。CAN總線的應(yīng)用領(lǐng)域廣泛,例如汽車(chē)、航空航天、醫(yī)學(xué)儀器等。在CAN總線中,數(shù)據(jù)通過(guò)網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:412168 can總線波特率一般采用多少 Can總線是指Controller Area Network,是一種高性能的串行通信協(xié)議。Can總線廣泛應(yīng)用于汽車(chē)、工業(yè)控制系統(tǒng)以及其他需要大規(guī)模數(shù)據(jù)交換的領(lǐng)域。Can
2023-09-07 15:05:381642 您是否遇到需要使用CAN總線,但MCU沒(méi)有集成CAN總線控制器的情況?您又是否遇到MCU的CAN口資源不夠的情況?一顆CSM330A芯片能解決您的問(wèn)題,本文將帶您了解CSM330A的優(yōu)勢(shì)
2023-09-04 16:41:46643 
(ISO11519以及ISO11898),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。差異點(diǎn)如下: CAN 總線協(xié)議已經(jīng)成為汽車(chē)計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN 為底層協(xié)議專為大型
2023-08-22 20:10:021063 
今日跟大家分享參加野火【瑞薩RA MCU創(chuàng)意氛圍賽】選手的項(xiàng)目——基于CAN總線的UDS診斷Bootloader升級(jí)MCU工具。
2023-08-21 14:01:49919 
CAN總線(Controller Area Network)是一種廣泛應(yīng)用于汽車(chē)、工業(yè)自動(dòng)化和其他領(lǐng)域的串行通信協(xié)議。以下是幾種常見(jiàn)的CAN總線通信協(xié)議。
2023-08-18 14:40:128837 
認(rèn)識(shí)CAN 總線錯(cuò)誤的第一步就是了解認(rèn)識(shí)CAN 總線協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發(fā)現(xiàn)并解決錯(cuò)誤的。
2023-08-14 15:18:463226 
CAN總線:CAN 是Controller Area Network 的縮寫(xiě)(以下稱為 CAN),是 ISO1 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。
2023-08-14 14:58:59961 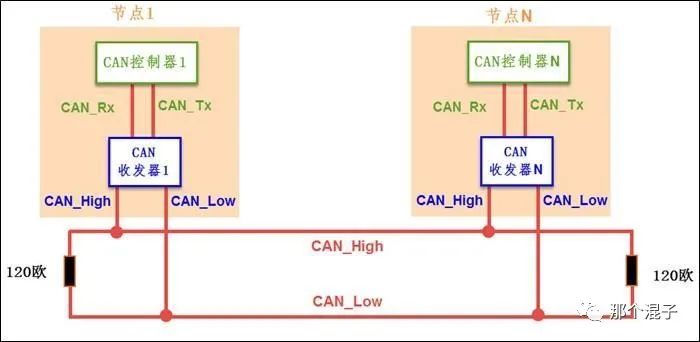
CAN總線協(xié)議目前廣泛應(yīng)用于汽車(chē)中各種不同控制器之間的通信,CAN總線的物理應(yīng)用是采用絕緣的雙絞線來(lái)進(jìn)行信號(hào)的傳輸,是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線,CAN總線本身具有強(qiáng)大的抗干擾能力。
2023-08-11 11:10:29922 
不同工業(yè)自動(dòng)化產(chǎn)線上設(shè)備有著各種不同的現(xiàn)場(chǎng)總線協(xié)議,如何打通不同協(xié)議設(shè)備間的“溝通”障礙,實(shí)現(xiàn)PLC與各類協(xié)議設(shè)備間互聯(lián)互通,提高生產(chǎn)自動(dòng)化效率?今天讓我們一起來(lái)問(wèn)問(wèn)ChatGPT它怎么看!Z請(qǐng)問(wèn)
2023-07-31 23:26:21601 大家好,今天要跟大家分享一款自主研發(fā)的通訊網(wǎng)關(guān),JM-ECT-CAN。這款產(chǎn)品能夠?qū)⒏鞣NCAN總線和ETHERCAT網(wǎng)絡(luò)連接起來(lái),實(shí)現(xiàn)高效的數(shù)據(jù)傳輸和通信。那么,這款通訊網(wǎng)關(guān)具體有哪些功能和特點(diǎn)呢?接下來(lái),我們就一起來(lái)了解一下。
2023-07-31 17:56:05410 
在之前的文章中,小編介紹了幾種常見(jiàn)的短距離無(wú)線通信傳輸技術(shù)和低功耗廣域網(wǎng)絡(luò)(LPWAN),后面的幾期文章將分享常見(jiàn)的有線傳輸方式,如CAN總線、串口通信、USB通信等。LPWAN主流技術(shù)
2023-07-31 16:59:14666 捷米JM-EIP-CAN通訊網(wǎng)關(guān)是一款自主研發(fā)的設(shè)備,它能夠?qū)⒏鞣NCAN總線和ETHERNET/IP網(wǎng)絡(luò)連接起來(lái),解決不同總線協(xié)議之間的通信障礙。作為ETHERNET/IP總線的從站,它可以連接到CAN總線中,根據(jù)節(jié)點(diǎn)號(hào)進(jìn)行讀寫(xiě)操作,讓你的總線通信更加便捷和高效。
2023-07-31 09:56:53340 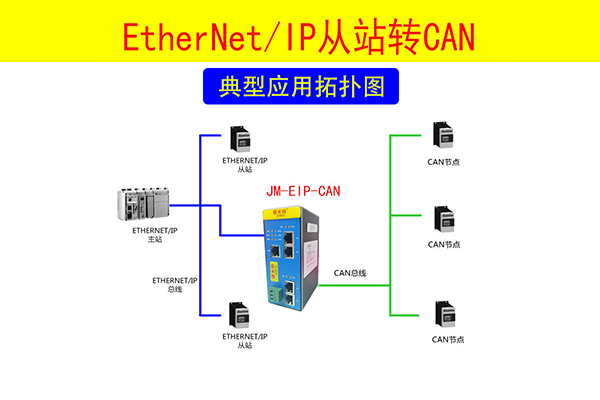
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-07-31 09:07:29349 
遠(yuǎn)創(chuàng)智控YC-ETH-CAN-2:將CAN數(shù)據(jù)轉(zhuǎn)換為網(wǎng)口數(shù)據(jù)!
2023-07-26 12:19:31515 
CAN 速率 CAN 總線以幀的形式發(fā)送數(shù)據(jù),但是最終到總線上的就是“0”和“1”這樣的二進(jìn)制數(shù)據(jù),這里就涉及到了通信速率,也就是每秒鐘發(fā)送多少位數(shù)據(jù),前面說(shuō)了CAN2.0 最高速度為 1Mbps
2023-07-25 10:44:05821 
遠(yuǎn)創(chuàng)智控YC-EIP-CAN通訊網(wǎng)關(guān)是一款自主研發(fā)的設(shè)備,它能夠?qū)⒏鞣NCAN總線和ETHERNET/IP網(wǎng)絡(luò)連接起來(lái),解決不同總線協(xié)議之間的通信障礙。作為ETHERNET/IP總線的從站,它可以連接到CAN總線中,根據(jù)節(jié)點(diǎn)號(hào)進(jìn)行讀寫(xiě)操作,讓你的總線通信更加便捷和高效。
2023-07-21 19:33:39911 
CAN總線 CAN 是Controller Area Network 的縮寫(xiě)(以下稱為CAN),是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在汽車(chē)產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性、低功耗、低成本的要求
2023-07-18 11:10:462820 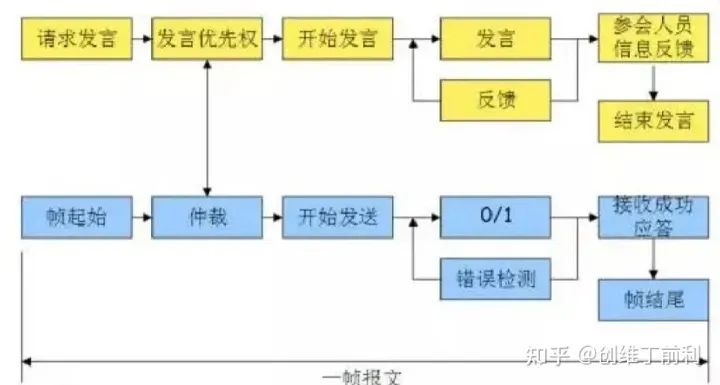
YC-CAN-RTU 是一款用于 CAN-Modbus 現(xiàn)場(chǎng)總線與 RS-232 總線或 RS-485 總線之間數(shù)據(jù)轉(zhuǎn)換的協(xié)議型轉(zhuǎn)換器,支持標(biāo)準(zhǔn) Modbus RTU 協(xié)議。集成 1 路RS-232
2023-07-13 18:40:04212 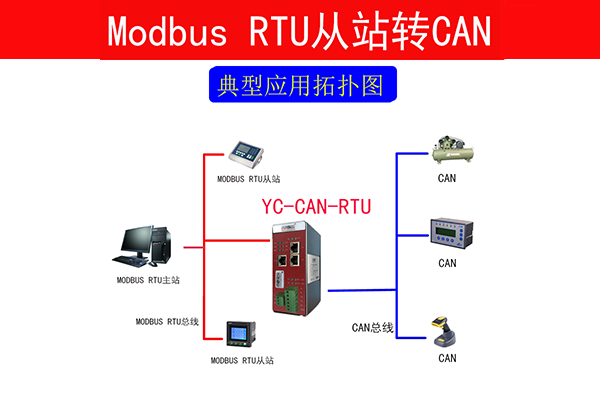
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此遠(yuǎn)創(chuàng)智控YC-ECT-CAN
2023-07-06 09:55:58514 
控制器區(qū)域網(wǎng)絡(luò)(Controller Area Network,簡(jiǎn)稱CAN):CAN總線的核心是控制器區(qū)域網(wǎng)絡(luò),它是一種串行通信協(xié)議,用于在汽車(chē)、工業(yè)自動(dòng)化和其他領(lǐng)域中實(shí)現(xiàn)分布式控制和通信。CAN協(xié)議提供了可靠的消息傳輸,具有抗干擾能力和高實(shí)時(shí)性。
2023-07-04 15:22:034407 捷米特JM-PN-CAN 是自主研發(fā)的一款 PROFINET 從站功能的通訊網(wǎng)關(guān)。主要功能是將各種 CAN 設(shè)備接入到 PROFINET 網(wǎng)絡(luò)中。
捷米特JM-PN-CAN連接到 PROFINET 總線中做為從站使用,連接到 CAN 總線中根據(jù)節(jié)點(diǎn)號(hào)進(jìn)行讀寫(xiě)。
2023-07-03 09:06:04352 
為了防止故障節(jié)點(diǎn)干擾甚至阻塞整個(gè)CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實(shí)現(xiàn)了復(fù)雜的故障限制機(jī)制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點(diǎn)需要采取以下措施進(jìn)行錯(cuò)誤檢測(cè):
2023-06-21 17:14:181837 
CAN總線是一種常用的總線,對(duì)于剛開(kāi)始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。
2023-06-19 17:20:141157 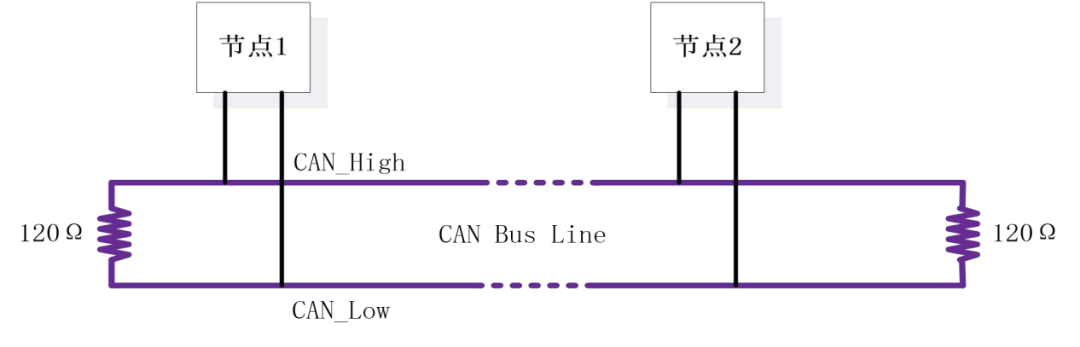
本文將介紹CAN總線通信協(xié)議的基礎(chǔ)知識(shí),目前的內(nèi)容僅為通用的協(xié)議部分,暫不涉及具體的外設(shè)模塊的用法。研究通信協(xié)議的具體內(nèi)容,主要是看建立通信的物理環(huán)境(信號(hào)與總線拓?fù)浣Y(jié)構(gòu)),通信過(guò)程的對(duì)象(通信幀),以及交互過(guò)程(通信或握手過(guò)程)。
2023-06-16 10:58:164332 
在之前的文章中,小編介紹了幾種常見(jiàn)的短距離無(wú)線通信傳輸技術(shù)和低功耗廣域網(wǎng)絡(luò)(LPWAN),后面的幾期文章將分享常見(jiàn)的有線傳輸方式,如CAN總線、串口通信、USB通信等。
2023-06-09 10:50:59550 
我們知道,CAN總線上的每個(gè)節(jié)點(diǎn)往總線上發(fā)送數(shù)據(jù)的同時(shí),會(huì)讀取總線上的數(shù)據(jù),并與自己發(fā)送的數(shù)據(jù)作對(duì)比。
2023-06-07 09:32:131274 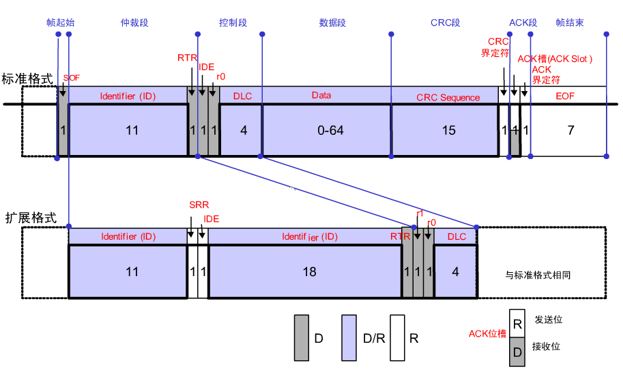
控制器局域網(wǎng)總線(CAN,Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 CAN協(xié)議用于汽車(chē)
2023-05-22 10:17:4014941 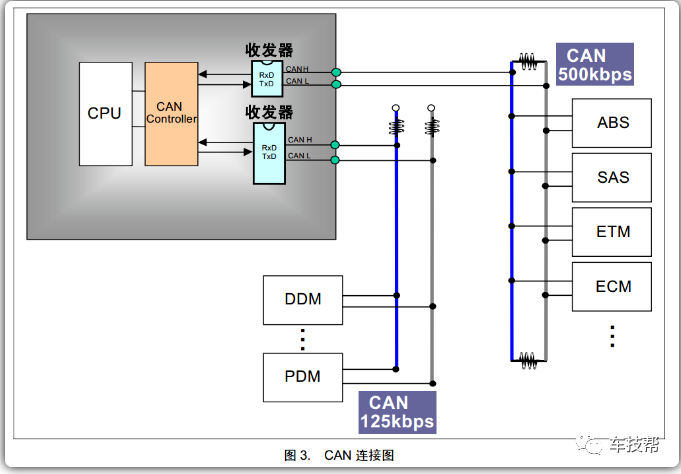
今天給大俠帶來(lái)基于FPGA的CAN總線控制器的設(shè)計(jì),由于篇幅較長(zhǎng),分三篇。今天帶來(lái)第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架。話不多說(shuō),上貨。
2023-05-18 09:21:30868 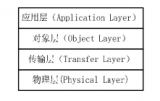
請(qǐng)問(wèn)can總線以太網(wǎng)轉(zhuǎn)換器使用UDP模式通訊速率高的原因是什么?
2023-05-17 16:24:20
CAN總線是一種常用的總線,對(duì)于剛開(kāi)始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。CAN2.0協(xié)議分為A版本和B版本,A版本協(xié)議為11位標(biāo)識(shí)符(標(biāo)準(zhǔn)幀),B版本在兼容11位ID標(biāo)識(shí)符的同時(shí),向上擴(kuò)展到29位ID標(biāo)識(shí)符。
2023-05-16 09:49:012297 
在CAN總線通信的應(yīng)用領(lǐng)域中,很多客戶需要將CANID放在CAN報(bào)文中,這樣更方便接入不同的設(shè)備,有利于用戶通過(guò)模塊更方便的組建自己的網(wǎng)絡(luò),使用自定的應(yīng)用協(xié)議。但是要實(shí)現(xiàn)這樣的應(yīng)用,用戶往往需要
2023-05-15 10:30:53415 使用env 配置CAN總結(jié),實(shí)現(xiàn)CAN測(cè)試,并順利完成收發(fā)數(shù)據(jù),用CAN分析儀展示。
2023-04-21 15:24:40260755 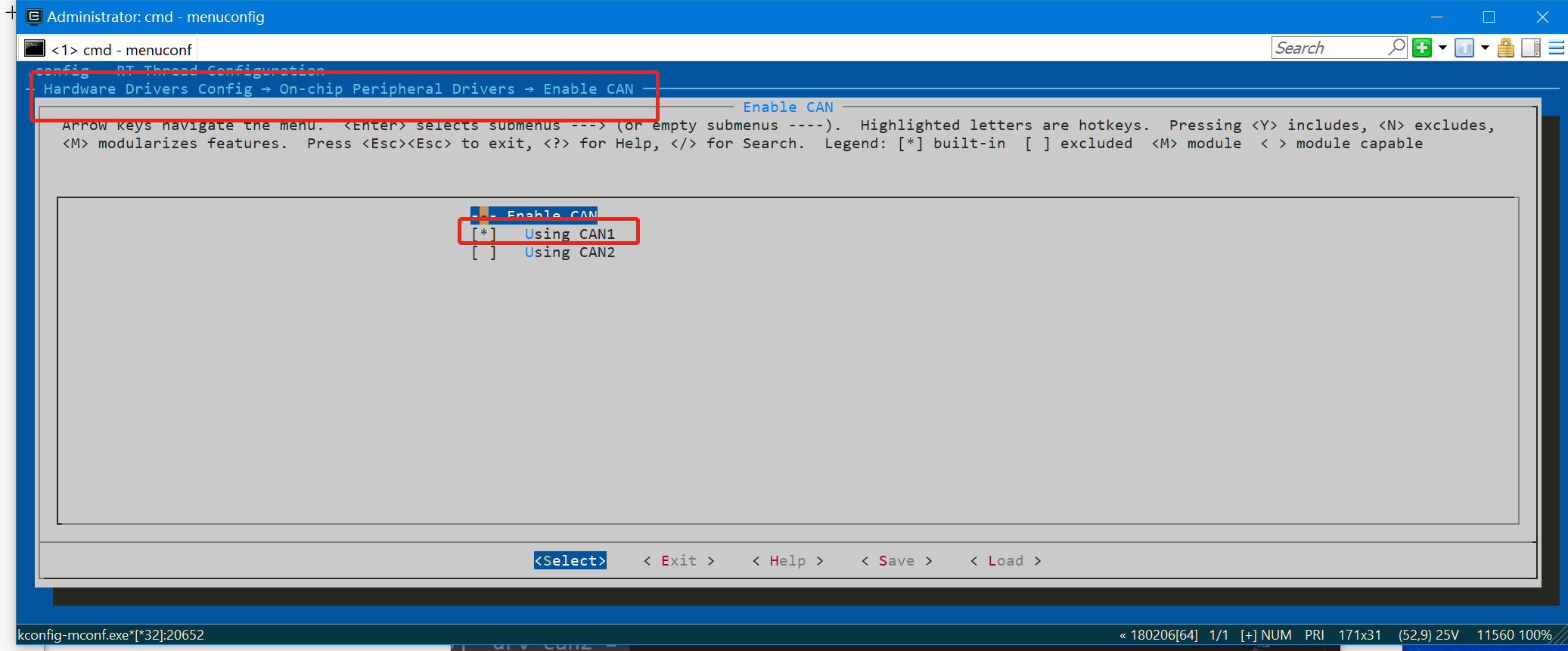
點(diǎn)擊關(guān)注,電磁兼容不迷路。什么是CAN總線CAN總線是一種廣泛用于汽車(chē)、工業(yè)自動(dòng)化和其他領(lǐng)域的串行通信協(xié)議。它允許多個(gè)設(shè)備共享通信線路,傳輸數(shù)據(jù)以及控制信號(hào)。CAN總線有兩個(gè)不同的版本
2023-04-21 09:42:31639 
的CANBUS數(shù)據(jù),CAN分析儀可以將其可視化。 2、進(jìn)行CAN數(shù)據(jù)的格式轉(zhuǎn)換,比如將CAN數(shù)據(jù)變?yōu)槎M(jìn)制格式、批處理格式、文本格式。 3、進(jìn)行目標(biāo)CAN設(shè)備波特率的解析,像是我們的CAN分析儀就可以自識(shí)別波特率。 4、進(jìn)行CANBUS數(shù)據(jù)的過(guò)濾,降低總線的負(fù)載。 5、檢查CAN數(shù)據(jù)中存在的
2023-04-17 17:15:02890 基本說(shuō)明:TCO-151可實(shí)現(xiàn) PROFINET網(wǎng)絡(luò)與CANopen或CAN網(wǎng)絡(luò)之間的數(shù)據(jù)通信。網(wǎng)關(guān)在PROFINET網(wǎng)絡(luò)作為從站,CANopen端既可以做主站也可以做從站,CAN端支持CAN2.0A/CAN2.0B協(xié)議,支持對(duì)CAN幀進(jìn)行過(guò)濾處理。
2023-04-14 11:12:21
在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒(méi)有關(guān)于總線拓?fù)浣Y(jié)構(gòu)的說(shuō)明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:181835 
即從CAN控制芯片輸出邏輯電平到CAN收發(fā)器,然后經(jīng)過(guò)CAN收發(fā)器內(nèi)部轉(zhuǎn)換將邏輯電平轉(zhuǎn)換為差分信號(hào)輸出到CAN總線上,CAN總線上的節(jié)點(diǎn)都可以決定自己是否需要總線上的數(shù)據(jù)。
2023-03-29 10:06:167597
 電子發(fā)燒友App
電子發(fā)燒友App

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論