 電子發(fā)燒友App
電子發(fā)燒友App


??? 目前遙控技術(shù)分為兩種,一種是有線遙控,另一種是無線遙控。而不需要連線的遙控技術(shù)出現(xiàn)后,更是遙控技術(shù)能夠得到人們普遍使用的一個(gè)分水嶺。目前社會上普遍使用的無限遙控方式主要分為三種,從表面上看它們的工作方式很相似,但實(shí)際上它們各種遙控工作原理都是不一樣的。紅外線遙控方式:它主要利用紅外線作為信號的傳輸媒介;其優(yōu)點(diǎn)在于價(jià)格低、濾除雜波能力強(qiáng)、信號的可靠性高、信號處理效率高、控制內(nèi)容多、體積小、消耗電量小等;其缺點(diǎn)在于控制距離短、無法繞開障礙、信號接收具有一定的局限性等;無線電遙控方式:它主要是利用無線電作為信號的傳輸媒介;其優(yōu)點(diǎn)在于可以實(shí)現(xiàn)超越距離傳輸、可以無視障礙傳輸、信號的可靠性高,處理信號效率高等;其缺點(diǎn)在于易受金屬的屏蔽等。超聲波遙控方式:它主要是利用高于人類聽覺范圍的機(jī)械波(頻率大于20KHz)作為傳輸媒介;其優(yōu)點(diǎn)在于反射性能好、穿透障礙物能力強(qiáng)、信號處理效率高等;其缺點(diǎn)在于速度慢、傳播距離短、易受障礙物的材質(zhì)影響等。
?
關(guān)鍵詞:遙控電路;紅外發(fā)射;紅外接收;單片機(jī)
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?? At present, remote control technology is divided into two types, one is a wired remote control and the other is a wireless remote control. Without the need for wired remote control technology, remote control technology is a watershed that people can use universally. Currently, there are three types of infinite remote control methods commonly used in the society. On the surface, their working methods are very similar. However, in fact, all of their remote control working principles are different. Infrared remote control mode: It mainly uses infrared as the transmission medium of the signal; its advantages are low price, strong clutter filtering ability, high signal reliability, high signal processing efficiency, control content, small size, low power consumption, etc.; Its disadvantages are short control distance, inability to bypass obstacles, and signal reception with certain limitations. Radio remote control method: It mainly uses radio as a signal transmission medium; its advantage is that it can achieve transmission beyond the distance, and can be transmitted without regard to obstacles. The reliability of the signal is high and the signal processing efficiency is high; the disadvantage is that it is vulnerable to metal shielding and the like. Ultrasonic remote control: It mainly uses mechanical waves (frequency greater than 20KHz) higher than the human hearing range as the transmission medium; its advantages are good reflection performance, strong ability to penetrate obstacles, and high signal processing efficiency; its disadvantages are slow speed and spread. The distance is short and is easily affected by the material of the obstacle.
Key words:Remote Control Circuit ;Infrared Emission;Infrared Receiver ;Mcu
?
目前社會上普遍使用的無限遙控方式主要分為三種,從表面上看它們的工作方式很相似,但實(shí)際上它們各種遙控工作原理都是不一樣的。它們的分類、工作原理以及優(yōu)缺點(diǎn)可歸總?cè)缦旅嫒c(diǎn):
1)紅外線遙控方式:它主要利用紅外線作為信號的傳輸媒介;其優(yōu)點(diǎn)在于價(jià)格低、濾除雜波能力強(qiáng)、信號的可靠性高、信號處理效率高、控制內(nèi)容多、體積小、消耗電量小等;其缺點(diǎn)在于控制距離短、無法繞開障礙、信號接收具有一定的局限性等。
2)無線電遙控方式:它主要是利用無線電作為信號的傳輸媒介;其優(yōu)點(diǎn)在于可以實(shí)現(xiàn)超越距離傳輸、可以無視障礙傳輸、信號的可靠性高,處理信號效率高等;其缺點(diǎn)在于易受金屬的屏蔽等。
3)超聲波遙控方式:它主要是利用高于人類聽覺范圍的機(jī)械波(頻率大于20KHz)作為傳輸媒介;其優(yōu)點(diǎn)在于反射性能好、穿透障礙物能力強(qiáng)、信號處理效率高等;其缺點(diǎn)在于速度慢、傳播距離短、易受障礙物的材質(zhì)影響等。
?
?
?
?
?
?
前言
隨著高度集成電路技術(shù)的飛躍進(jìn)步,人們的日常起居生活發(fā)生了很大的變化。利用集成電路技術(shù),把各種設(shè)備體積做到更小,而且操作起來也更簡便,為人類帶來了極大的便利,因此遙控技術(shù)被應(yīng)用到社會的各個(gè)領(lǐng)域。目前遙控技術(shù)分為兩種,一種是有線遙控,另一種是無線遙控。而不需要連線的遙控技術(shù)出現(xiàn)后,更是遙控技術(shù)能夠得到人們普遍使用的一個(gè)分水嶺。在無線遙控的眾多領(lǐng)域中,被使用得最為廣泛是利用紅外線作為傳輸信號的紅外遙控。這種技術(shù)的應(yīng)用,在我們?nèi)粘I钪须S處可見,例如電視機(jī),空調(diào),各種無線遙控玩具等。
目前社會上普遍使用的無限遙控方式主要分為三種,從表面上看它們的工作方式很相似,但實(shí)際上它們各種遙控工作原理都是不一樣的。它們的分類、工作原理以及優(yōu)缺點(diǎn)可歸總?cè)缦旅嫒c(diǎn):
1)紅外線遙控方式:它主要利用紅外線作為信號的傳輸媒介;其優(yōu)點(diǎn)在于價(jià)格低、濾除雜波能力強(qiáng)、信號的可靠性高、信號處理效率高、控制內(nèi)容多、體積小、消耗電量小等;其缺點(diǎn)在于控制距離短、無法繞開障礙、信號接收具有一定的局限性等。
2)無線電遙控方式:它主要是利用無線電作為信號的傳輸媒介;其優(yōu)點(diǎn)在于可以實(shí)現(xiàn)超越距離傳輸、可以無視障礙傳輸、信號的可靠性高,處理信號效率高等;其缺點(diǎn)在于易受金屬的屏蔽等。
3)超聲波遙控方式:它主要是利用高于人類聽覺范圍的機(jī)械波(頻率大于20KHz)作為傳輸媒介;其優(yōu)點(diǎn)在于反射性能好、穿透障礙物能力強(qiáng)、信號處理效率高等;其缺點(diǎn)在于速度慢、傳播距離短、易受障礙物的材質(zhì)影響等。
人們?nèi)粘I钪兴褂玫倪b控設(shè)備大多是在家里短距離范圍內(nèi),這就決定了紅外方式是普遍適應(yīng)電商市場的一大因素。因此,人眼無法看見的紅外線被更多的應(yīng)用到短距離控制和數(shù)據(jù)通信系統(tǒng),把它作為傳輸媒介進(jìn)行數(shù)據(jù)信號交流。從而構(gòu)成我們常見的紅外遙控通信系統(tǒng)。
?
?
?
目錄
摘??? 要.................................................................. I
ABSTRACT................................................................. II
第1章? 緒? 論............................................................ 1
1.1設(shè)計(jì)任務(wù)要求....................................................... 1
1.2紅外技術(shù)發(fā)展歷史背景............................................... 1
1.3 本章小結(jié).......................................................... 2
第2章? 設(shè)計(jì)方案與論證.................................................... 3
2.1系統(tǒng)方案比較....................................................... 3
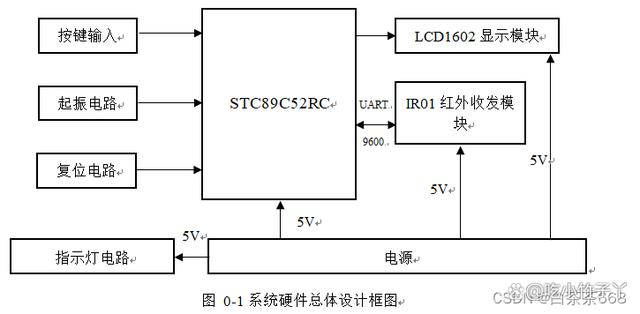
2.2 硬件電路的方框圖.................................................. 4
2.3 紅外多路遙控控制的紅外光介紹...................................... 6
2.4 本章小結(jié).......................................................... 6
第3章? 多路紅外遙控硬件電路設(shè)計(jì).......................................... 7
3.1 多路遙控紅外發(fā)射電路.............................................. 7
3.1.1 鍵盤電路..................................................... 7
3.1.2 單片機(jī)小系統(tǒng)................................................. 8
3.1.3 數(shù)碼顯示電路................................................ 12
3.1.4 編碼電路.................................................... 14
3.1.5 多諧震蕩電路................................................ 16
3.1.6 調(diào)制與發(fā)射電路.............................................. 18
3.2 多路遙控紅外接收控制電路......................................... 20
3.2.1 多路紅外接收電路............................................ 20
3.2.2 放大電路.................................................... 22
3.2.3 解碼電路.................................................... 23
3.2.4 顯示電路.................................................... 25
3.3 紅外多路遙控發(fā)射與接收系統(tǒng)整機(jī)電路............................... 26
3.4 本章小結(jié)......................................................... 26
第4章? 軟件設(shè)計(jì)......................................................... 27
4.1 軟件設(shè)計(jì)概述..................................................... 27
4.2 流程框圖......................................................... 27
?
4.2.1 發(fā)射部分流程框圖............................................ 27
4.2.2 接收部分流程框圖............................................ 31
4.3 程序清單......................................................... 34
4.4 本章小結(jié)......................................................... 34
第5章? 使用軟件介紹..................................................... 35
5.1 KELL的使用....................................................... 35
5.2 Proteus的使用.................................................... 38
5.3 本章小結(jié)......................................................... 41
第6章? 系統(tǒng)的調(diào)試與仿真................................................. 42
6.1發(fā)射系統(tǒng)的調(diào)試.................................................... 42
6.2 接收系統(tǒng)的調(diào)試................................................... 43
6.3 整機(jī)聯(lián)調(diào)及數(shù)據(jù)分析............................................... 44
6.4 仿真結(jié)果......................................................... 44
6.5本章小結(jié).......................................................... 44
第7章 結(jié)束語............................................................ 45
致? 謝................................................................... 46
參考文獻(xiàn)................................................................. 47
附? 錄................................................................... 49
附錄I:紅外多路遙控發(fā)射系統(tǒng).......................................... 49
附錄II:紅外遙控多路接收系統(tǒng)......................................... 50
附錄III:紅外多路遙控發(fā)射系統(tǒng)仿真.................................... 51
附錄IV:紅外多路遙控接收系統(tǒng)仿真..................................... 52
附錄V:程序清單...................................................... 53
發(fā)送程序.......................................................... 53
接收程序.......................................................... 56
?
?
?
?
?
?
?
?
本設(shè)計(jì)要求完成通過空間的傳播實(shí)現(xiàn)對受控設(shè)備的控制,發(fā)射部分完成遙控指令的發(fā)射,接受部分完成遙控指令的接受。
功能要求:發(fā)射端用數(shù)字顯示所控的路數(shù)和狀態(tài)級別,接受端用數(shù)碼管作為被控對象并顯示受控對象及工作狀態(tài)。遙控距離:不小于3m。即紅外遙控發(fā)射機(jī)與紅外接收機(jī)之間距離不小于3m;
a) 遙控路數(shù):8路。即可對8個(gè)受控設(shè)備進(jìn)行開關(guān)控制;
b) 工作頻率:40kHz。即紅外發(fā)射和接收的載頻為40kHz;
c) 功能要求:由1臺紅外發(fā)射機(jī)和1臺紅外接收機(jī)實(shí)現(xiàn)對8個(gè)設(shè)備的控制。
每次發(fā)射只控制一個(gè)數(shù)碼管的亮的路數(shù)和亮的方式;用數(shù)碼管的亮的路數(shù)和亮的方式表示受控設(shè)備的開、關(guān)狀態(tài);要求用單片機(jī)完成設(shè)計(jì)。
紅外光線就是波長介于0.75~3μm到1000μm之間的電磁輻射。在紅外技術(shù)領(lǐng)域中,由于不同波長的紅外輻射在地球大氣層中傳播特性的不同,通常又把整個(gè)紅外輻射分成下列幾個(gè)波段,分別稱為:近紅外:波長范圍0.75~3μm;中紅外:波長范圍3~6μm;遠(yuǎn)紅外:波長范圍6~15μm;極遠(yuǎn)紅外15~1000μm。紅外實(shí)驗(yàn)和理論的發(fā)展,促進(jìn)了紅外技術(shù)的建立。二十世紀(jì)初,科學(xué)工作者開創(chuàng)了紅外學(xué)譜和精密輻射學(xué)的應(yīng)用,對恒星和行星的溫度進(jìn)行了輻射測量并把紅外光源用于醫(yī)療過程。1920年到1950年間粗線了紅外探測、保密通訊、放到預(yù)警、溫度遙測等設(shè)備的專利文獻(xiàn)。近五十年以來,半導(dǎo)體工藝以及激光技術(shù)為它提供了了高靈敏度,響應(yīng)速度快的光子探測器和單色性好、能量集中的相關(guān)光源,使得紅外技術(shù)的得到了突飛猛進(jìn)的發(fā)展。到了今天,廣泛應(yīng)用工業(yè)、農(nóng)業(yè)、國防、醫(yī)療、交通等各行各業(yè),已經(jīng)逐步形成了一個(gè)相對獨(dú)立的紅外線系統(tǒng)工程領(lǐng)域。
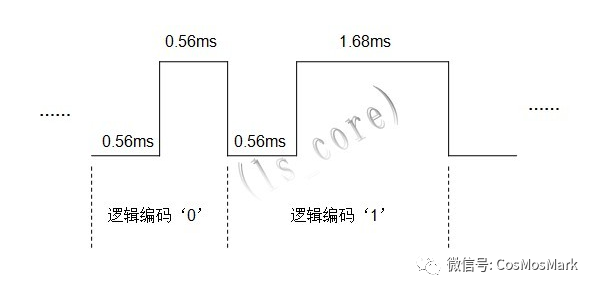
紅外線是波長在750nm至1mm之間的電磁波,它的頻率高于微波而低于可見光,是一種人的眼睛看不到的光線。由于紅外線的波長較短,對障礙物的衍射能力差,所以更適合應(yīng)用在需要短距離無線通訊的場合,進(jìn)行點(diǎn)對點(diǎn)的直線數(shù)據(jù)傳輸。紅外數(shù)據(jù)協(xié)會(IRDA)將紅外數(shù)據(jù)通訊所采用的光波波長的范圍限定在850nm至900nm之內(nèi)。
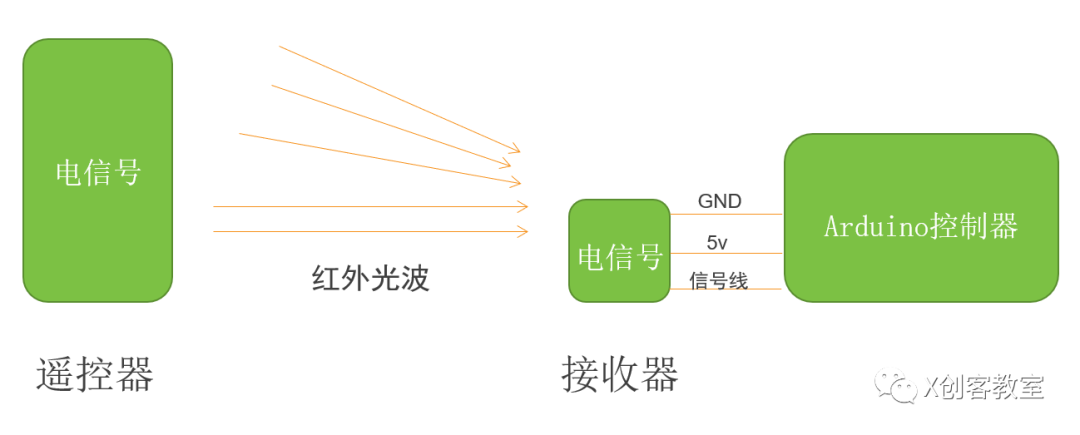
紅外通訊以紅外線作為通訊載體,通過紅外光在空中的傳播來傳輸數(shù)據(jù),它由紅外發(fā)射器和紅外接收器來完成。在發(fā)射端,發(fā)送的數(shù)字信號經(jīng)過適當(dāng)?shù)恼{(diào)制編碼后,送入電光變換電路,經(jīng)紅外發(fā)射管轉(zhuǎn)變?yōu)榧t外光脈沖發(fā)射到空中;在接收端,紅外接收器對接收到的紅外光脈沖進(jìn)行光電變換,解調(diào)譯碼后恢復(fù)出原信號。
紅外通訊有著成本低廉、連接方便、簡單易用和結(jié)構(gòu)緊湊的特點(diǎn),因此在小型的移動設(shè)備中獲得了廣泛的應(yīng)用。通過紅外接口,各類移動設(shè)備可以自由進(jìn)行數(shù)據(jù)交換。
?? 本章主要講述本設(shè)計(jì)的要求和紅外線的發(fā)展歷史。
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
??? 方案一:用專用調(diào)制、解調(diào)芯片組成的紅外發(fā)射、接收系統(tǒng)的核心——編碼、解碼電路。代碼產(chǎn)生電路由按鍵與其它元器件組成。本設(shè)計(jì)通過VD5026對鍵盤電路產(chǎn)生的控制信號進(jìn)行并/串轉(zhuǎn)換,由17腳輸出編碼數(shù)據(jù),再將編碼數(shù)據(jù)通過脈調(diào)制電路調(diào)制在較高的載波上通過紅外光發(fā)射。紅外接收管將光信號轉(zhuǎn)換為電信號,由解碼器進(jìn)行解調(diào),再由VD5027對解調(diào)出來的串行數(shù)據(jù)進(jìn)行解碼,使其成為控制代碼去控制各電路。紅外發(fā)射/接收系統(tǒng)組成方框圖如圖2-1。
?
圖2-1? 紅外發(fā)射/接收系統(tǒng)組成方框圖
方案二:代碼是按鍵組成的鍵盤電路產(chǎn)生,然后施密特觸發(fā)器對按鍵信號進(jìn)行整形所得,編碼和調(diào)制用AT89C51單片機(jī)的定時(shí)器將按鍵信號調(diào)制在40KHz的載波信號上,然后通過功率放大后通過紅外發(fā)射管發(fā)射出去。接收電路用紅外線接收二極管實(shí)現(xiàn)光電轉(zhuǎn)換,然后用高頻模擬鎖相環(huán)進(jìn)行信號解調(diào),解調(diào)后的串行數(shù)據(jù)送單片機(jī)進(jìn)行解碼,同時(shí)實(shí)現(xiàn)對后續(xù)電路的控制功能。紅外發(fā)射/接收電路框圖如圖2-2所示。
?
(a) 紅外發(fā)射電路框圖
?
????????????????????????????? (b) 紅外接收電路框圖
? ??圖2-2? 紅外發(fā)射/接收電路框圖
方案一中采用專用芯片組成編碼解碼電路,可實(shí)現(xiàn)對16×211路電路的控制,其電路簡單,抗干擾能力強(qiáng),編碼調(diào)制全部用硬件實(shí)現(xiàn),各分支電路相互獨(dú)立,設(shè)計(jì)調(diào)試比較簡單、成本低,組裝方便,易于推廣。容易發(fā)生故障,不易變換功能。
方案二利用AT89C51單片機(jī)對信號進(jìn)行編碼、解碼,同時(shí)用單片機(jī)的定時(shí)器將信號進(jìn)行調(diào)制,需用軟件完成,其編程工作量大,要求嚴(yán)格,尤其是高頻信號,程序稍有差錯(cuò)便使接收部分不能正常工作成本高,控制方便,易變換功能。
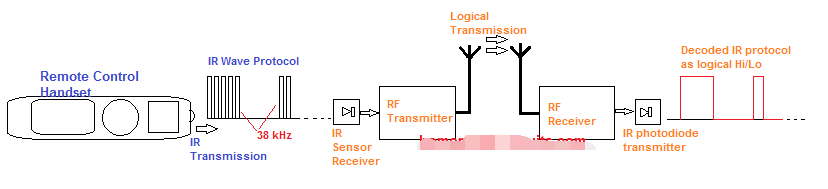
該系統(tǒng)通過利用紅外線作為數(shù)據(jù)信號傳送的媒介,把按鍵鍵值轉(zhuǎn)換成數(shù)據(jù)脈沖并調(diào)制加載高頻載波后從發(fā)射端的紅外發(fā)射頭把信號發(fā)射出去。然后利用接收端的紅外接收頭探測空間中的紅外信號,并且把紅外線信號接收進(jìn)來進(jìn)行放大它波形的幅度,再對其進(jìn)行選擇適合頻率信號,最后對其進(jìn)行調(diào)制成脈沖送入控制芯片,實(shí)現(xiàn)系統(tǒng)利用低功率器件控制高功率設(shè)備工作的開關(guān)狀態(tài)。本次紅外線遙控系統(tǒng)主要是利用STC89C52單片機(jī)作為核心控制部分,從而設(shè)計(jì)出一個(gè)具有紅外發(fā)射部分和紅外接收部分的紅外多路遙控系統(tǒng)。
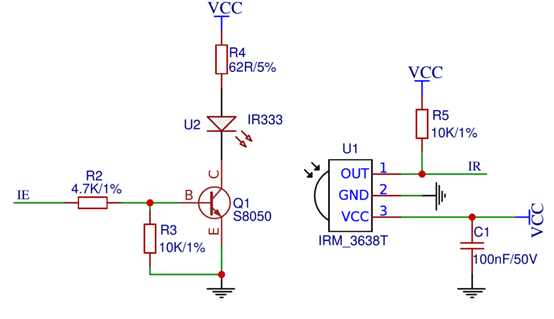
系統(tǒng)設(shè)計(jì)中的發(fā)射部分電路采用了TC9012作為控制核心的芯片,芯片可以把需要發(fā)送的信號調(diào)制成脈沖信號。采用紅外發(fā)射管作為發(fā)射端的發(fā)射部分模塊,可將已調(diào)制的脈沖信號發(fā)射出去。系統(tǒng)設(shè)計(jì)中的接收部分采用了STC89C52單片機(jī)作為核心。采用1838紅外線的一體接收模塊作為紅外接收頭。該接收頭內(nèi)部有紅外線監(jiān)測電路、信號幅度放大電路、信號幅度穩(wěn)定電路、信號頻率選擇電路等,故而它是一種高度集成電路。接收端的紅外線監(jiān)測二極管探測到由發(fā)射端發(fā)送到空間的紅外線信號后會把它接收進(jìn)來處理,然后把處理過的信號送入系統(tǒng)的控制核心部分(即單片機(jī))做出相應(yīng)的反應(yīng)。
。
圖2-4 紅外多路遙控接收方框圖
??? 發(fā)射部分的主要元件為紅外發(fā)光二極管。它實(shí)際上是一只特殊的發(fā)光二極管,由于其內(nèi)部材料不同于普通發(fā)光二極管,因而在其兩端施加一定電壓時(shí),它便發(fā)出的是紅外線而不是可見光。目前大量使用的紅外發(fā)光二極管發(fā)出的紅外線波長為940nm左右,外形與普通發(fā)光二極管相同,只是顏色不同。紅外發(fā)光二極管一般有黑色、深藍(lán)、透明三種顏色。判斷紅外發(fā)光二極管好壞的辦法與判斷普通二極管一樣:用萬用表電阻擋量一下紅外發(fā)光二極管的正、反向電阻即可。的儀器才能精確測定,而業(yè)余條件下只能用拉距法來粗略判定。接收部分的紅外接收管是一種光敏二極管。在實(shí)際應(yīng)用中要給紅外接收二極管加反向偏壓,它才能正常工作,亦即紅外接收二極管在電路中應(yīng)用時(shí)是反向運(yùn)用,這樣才能獲得較高的靈敏度。紅外接收二極管一般有圓形和方形兩種。
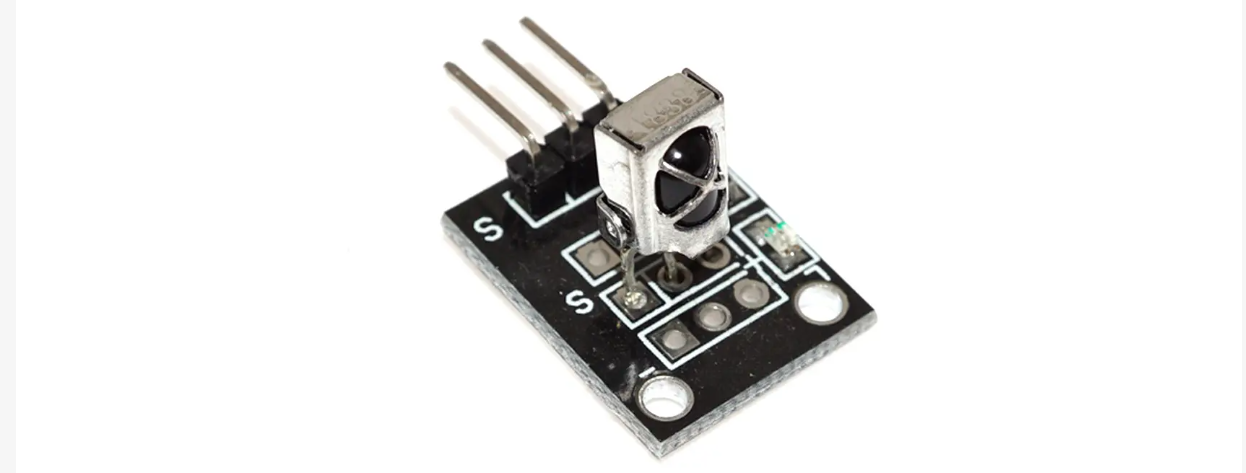
由于紅外發(fā)光二極管的發(fā)射功率一般都較小(100mW左右),所以紅外接收二極管接收到的信號比較微弱,因此就要增加高增益放大電路。前些年常用μPC1373H、CX20106A等紅外接收專用放大電路。最近幾年不論是業(yè)余制作還是正式產(chǎn)品,大多都采用成品紅外接收頭。成品紅外接收頭的封裝大致有兩種:一種采用鐵皮屏蔽;一種是塑料封裝。均有三只引腳,即電源正(VDD)、電源負(fù)(GND)和數(shù)據(jù)輸出(VO或OUT)。紅外接收頭的引腳排列因型號不同而不盡相同,可參考廠家的使用說明。成品紅外接收頭的優(yōu)點(diǎn)是不需要復(fù)雜的調(diào)試和外殼屏蔽,使用起來如同一只三極管,非常方便。但在使用時(shí)注意成品紅外接收頭的載波頻率。紅外遙控常用的載波頻率為38kHz,這是由發(fā)射端所使用的455kHz晶振來決定的。在發(fā)射端對晶振進(jìn)行整數(shù)分頻,分頻系數(shù)一般取12,所以455kHz÷12≈37.9 kHz≈38kHz。也有一些遙控系統(tǒng)采用36kHz、40kHz、56kHz等,一般由發(fā)射端晶振的振蕩頻率來決定。此次遙控系統(tǒng)的設(shè)計(jì)要求載波頻率為40KHz。
多路控制的紅外發(fā)射部分一般有許多按鍵,代表不同的控制功能。當(dāng)發(fā)射端按下某一按鍵時(shí),相應(yīng)地在接收端有不同的輸出狀態(tài)。接收端的輸出狀態(tài)大致可分為脈沖、電平、自鎖、互鎖、數(shù)據(jù)五種形式。“脈沖”輸出是當(dāng)按發(fā)射端按鍵時(shí),接收端對應(yīng)輸出端輸出一個(gè)“有效脈沖”,寬度一般在100ms左右。“電平”輸出是指發(fā)射端按下鍵時(shí),接收端對應(yīng)輸出端輸出“有效電平”,發(fā)射端松開鍵時(shí),接收端“有效電平”消失。此處的“有效脈沖”和“有效電平”,可能是高、也可能是低,取決于相應(yīng)輸出腳的靜態(tài)狀況,如靜態(tài)時(shí)為低,則“高”為有效;如靜態(tài)時(shí)為高,則“低”為有效。大多數(shù)情況下“高”為有效。“自鎖”輸出是指發(fā)射端每按一次某一個(gè)鍵,接收端對應(yīng)輸出端改變一次狀態(tài),即原來為高電平變?yōu)榈碗娖剑瓉頌榈碗娖阶優(yōu)楦唠娖健4朔N輸出適合用作電源開關(guān)、靜音控制等。有時(shí)亦稱這種輸出形式為“反相”。“互鎖”輸出是指多個(gè)輸出互相清除,在同一時(shí)間內(nèi)只有一個(gè)輸出有效。電視機(jī)的選臺就屬此種情況,其它如調(diào)光、調(diào)速、音響的輸入選擇等。“數(shù)據(jù)”輸出是指把一些發(fā)射鍵編上號碼,利用接收端的幾個(gè)輸出形成一個(gè)二進(jìn)制數(shù),來代表不同的按鍵輸入。一般情況下,接收端除了幾位數(shù)據(jù)輸出外,還應(yīng)有一位“數(shù)據(jù)有效”輸出端,以便后級適時(shí)地來取數(shù)據(jù)。這種輸出形式一般用于與單片機(jī)或微機(jī)接口。
除以上輸出形式外,還有“鎖存”和“暫存”兩種形式。所謂“鎖存”輸出是指對發(fā)射端每次發(fā)的信號,接收端對應(yīng)輸出予以“儲存”,直至收到新的信號為止;“暫存”輸出與上述介紹的“電平”輸出類似。
本章是通過方案比較來確定方案,將方案用方框圖來細(xì)化本方案的結(jié)構(gòu),最后簡單介紹什么是多路紅外遙控控制。
?
?
?
?
?
?
多路紅外發(fā)射電路是由鍵盤電路、單片機(jī)小系統(tǒng)、振蕩器、編碼電路、調(diào)制與發(fā)射電路和顯示電路組成。????
由4×4開關(guān)組成,其中四行路是與單片機(jī)的P1.0~P1.3口相連,四列路是與單片機(jī)的P1.4~P1.7口相連。鍵盤電路如下圖3-1。
逐點(diǎn)掃描法:設(shè) P1口的低 4 位置為 0,高 4位置為 1,當(dāng)無按鍵時(shí) P1口的數(shù)據(jù)始終保持F0H 不變。當(dāng)有按鍵時(shí),高位中的高電平會和低位中的低電平短路。此時(shí)高位中的高電平就會被拉低(任何高電平遇到低電平都為低),即高 4 位中有 0出現(xiàn)。當(dāng)單片機(jī)讀 P1 口的值不為 F0H 時(shí)則表示有鍵按下,經(jīng)過去抖處理后就開始掃描這一個(gè)鍵的位置了。先把 P1 的高 4 位置 0,低 4 位置 1,下面置低第 1 列線并置高第 1 行,之后再讀第 1 行的電平,為高說明不是第 1 行第 1 列的鍵被按下,跳到下一個(gè)點(diǎn)的掃描(第 1列第 2 列)。當(dāng)其為 0時(shí)表示第 1 行第 1列的鍵被按下,調(diào)用相應(yīng)處理程序。
逐點(diǎn)掃描的優(yōu)點(diǎn)是它的編程簡單,易于理解,可以作同時(shí)按多個(gè)鍵的識別。缺點(diǎn)是它的速度慢,處理程序代碼較長。
逐行掃描法:
和逐點(diǎn)掃描的方法相似,只是數(shù)據(jù)的處理是以一行的 4 位數(shù)據(jù)直接處理,也就是先使能第 1 行(置低電平),然后看哪一列的數(shù)據(jù)變成低電平了,如果高4 位數(shù)據(jù)沒有變?yōu)榈碗娖絼t使能下一行。找到了按鍵所在的行并測出列數(shù)據(jù)就可以調(diào)用相應(yīng)處理程序。
逐行掃描的照逐點(diǎn)掃描要好的多,程序相對簡單,速度快,也支持同時(shí)多按鍵處理。一般的掃描鍵盤多用此法。
全局掃描法:
全局掃描是只先設(shè) P1的高 4位為 1,低 4位為 0,即 F0H,然后讀取 P1 口的數(shù)據(jù)如果不為 F0H 說明有鍵按下,經(jīng)過延時(shí)去抖處理后讀出 P1 口的值,因?yàn)榈?/span> 4 位是 0 無論按鍵如果都不會影響它,只有高 4 位被改變。將數(shù)據(jù)寄存起來后再把 P1 的狀態(tài)反過來,將 P1的高 4 位置0,低 4位置 1,即 0FH,再讀一次數(shù)據(jù)。這時(shí)高 4 位的值是 0 依然不變。這樣兩次讀取我們就得到了 2 個(gè)字節(jié)的數(shù)據(jù)(XXXX0000和 0000XXXX,X為讀到的數(shù)據(jù)),最后我們將這兩個(gè)數(shù)相或(將兩個(gè)半字節(jié)數(shù)據(jù)溶合為一個(gè)字節(jié)),就得到了一個(gè)新的字節(jié),用這個(gè)字節(jié)和我們的設(shè)定的數(shù)據(jù)比較來決定鍵值。
全局掃描只用兩次掃描,速度快,易學(xué)易用,程序簡單,可是它不支持同時(shí)多鍵處理,最佳適用 4*4掃描鍵盤,可以用在一般的用途。
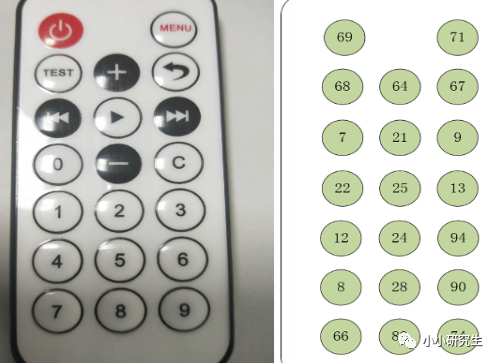
其鍵盤功能:見表3-1。
表 3-1 鍵盤功能表
圖3-1多路遙控紅外發(fā)射鍵盤電路
?
?
?
?
STC89系列單片機(jī)是由STC公司生產(chǎn)制造的新型單片機(jī)。它與AT89系列單片機(jī)擁有的功能一樣,都利用了8051技術(shù)制作芯片的CPU。以AT89C51為例,它采用了兩排直插式的封裝(PDIP),如圖2-7。它的各管腳分別有不同的作用,具體說明如下:
1)40腳(VCC):連接電源的正極,為芯片提供工作所需要的電壓(5V)。
2)20腳(VSS):連接電源的負(fù)極,即接地。
3)19腳(XTAL1):連接芯片外部晶振體的
圖2-7 TA89C51
一個(gè)管腳。在芯片內(nèi)部,它作為反向放大器的輸入端。
4)18腳(XTAL2):連接芯片外部晶振體的另一個(gè)管腳,從而形成一個(gè)芯片外部的時(shí)鐘振蕩器。在芯片內(nèi)部,它作為放大器的輸出端,與前述的輸入端一起構(gòu)成芯片內(nèi)部的振蕩器。
5)30腳(ALE/PROG):地址鎖存允許/編程信號接口。芯片需要對片外存儲器進(jìn)行訪問時(shí),該接口就作為數(shù)據(jù)地址的鎖存信號ALE。它作為鎖存信號輸出時(shí),對數(shù)據(jù)地址的低8位進(jìn)行鎖存。不論芯片是否對片外的存儲器進(jìn)行訪問,ALE接口端都以不變的頻率(即振蕩器的頻率的1/6)周期性地產(chǎn)生正脈沖信號。由于這一原因,該接口端也可以被用作對芯片外部輸出時(shí)鐘信號,或者是被用作定時(shí)等。
6)29腳(PSEN):是訪問芯片外部存儲程序的存儲器的選通信號接口端。當(dāng)芯片需要對外部程序存儲器進(jìn)行訪問時(shí),在每個(gè)機(jī)器周期內(nèi)PSEN接口端會產(chǎn)生兩次有效的信號(即輸出了兩個(gè)有效脈沖)。而當(dāng)芯片需要對外部數(shù)據(jù)存儲器進(jìn)行訪問時(shí),該接口端不會產(chǎn)生有效的信號。
7)31腳(EA/Vpp):外部程序存儲器訪問允許/編程電壓輸入接口端。當(dāng)只需要芯片對外部程序存儲器(地址范圍從0000H到FFFFH)進(jìn)行訪問時(shí),EA接口端就必須保持低電平(接地)。而該接口端保持高電平時(shí),芯片則會執(zhí)行來自內(nèi)部程序存儲器的程序指令。
8)9腳(RESET):是復(fù)位信號的輸入接口端。在振蕩器工作期間,如果有兩個(gè)機(jī)器周期的高電平輸入該接口端,將會使芯片復(fù)位。
10)輸入/輸出腳(P0口、P1口、P2口、P3口)
(1)P0腳(P0.0至P0.7,共有8個(gè)管腳):它是一種雙向并且具有8位的輸入/輸出接口端。在訪問芯片外部的存儲器時(shí),可以分時(shí)用作低八位地址線和八位數(shù)據(jù)線。它能驅(qū)動八個(gè)LSTTL負(fù)載。??
(2)P1腳(P1.0至P1.7,共有8個(gè)管腳):一種內(nèi)部自帶上拉電阻的8位雙向輸入/輸出接口端。它可以驅(qū)動四個(gè)LSTTL負(fù)載。
(3)P2腳(P2.0至P2.7,共有8個(gè)管腳):一種內(nèi)部自帶上拉電阻的8位雙向輸入/輸出接口端。在訪問芯片外部的存儲器時(shí),可以送出高八位地址。它可以驅(qū)動 4個(gè)LSTTL負(fù)載。
(4)P3腳(P3.0至P3.7,共有8個(gè)管腳):一種內(nèi)部自帶上拉電阻的8位雙向輸入/輸出接口端。這八個(gè)管腳都具有第二功能。它可以驅(qū)動4個(gè)LSTTL負(fù)載。
?
圖3-3 單片機(jī)小系統(tǒng)電路
????? 單片機(jī)應(yīng)用系統(tǒng)中,的數(shù)碼顯示器件有LED(發(fā)光二極管顯示器)和LCD(液晶顯示器)。這兩種器件都具有成本低、配置靈活、與單片機(jī)接口方便的特點(diǎn)。在本系統(tǒng)接分部分采取接入共陽極數(shù)碼管的方式,用于顯示當(dāng)前正在進(jìn)行遙控工作的路數(shù),這樣方便于了解系統(tǒng)的工作狀態(tài)。
市面上流行的LED顯示器里包含有8個(gè)發(fā)光二極管,被稱為數(shù)碼管。數(shù)碼管又被分為兩類,一類是共陰極數(shù)碼管,另一類是共陽極數(shù)碼管。它里面的8個(gè)發(fā)光二極管被設(shè)置成一個(gè)有七段“日”字形,右下角還有一位小數(shù)點(diǎn),加起來共有八段,故而其又稱為八段顯示器,如圖3-9。這樣一來,用來顯示它的構(gòu)造形態(tài)的數(shù)據(jù)剛好占一個(gè)字節(jié)。其對應(yīng)關(guān)系如表3-3.
?
?????????????? ??
???????????????????????? ???圖3-4 數(shù)碼管電路圖
利用數(shù)碼管和芯片接口簡單這一特性,把它的八個(gè)管腳與芯片相對應(yīng)的八個(gè)并行輸出口對接。然后要想得到不同數(shù)字就只需要芯片輸出不同的數(shù)據(jù)即可。用來實(shí)現(xiàn)這種操作的八位字節(jié)數(shù)據(jù)被稱為段選碼。
設(shè)計(jì)要求用數(shù)字顯示所控制的路數(shù),即將發(fā)送的鍵值轉(zhuǎn)換成與數(shù)碼管顯示相對應(yīng)的字符碼。選89C51的P2口作為字符碼輸出端口。因?yàn)?/span>51單片機(jī)I/O口輸出低電平時(shí)輸出的電流很小,數(shù)碼管不會太亮,所以用鎖存器74HC537來驅(qū)動數(shù)碼管發(fā)光,數(shù)碼管顯示1~8數(shù)字時(shí),P2口應(yīng)送出的字符值分別為:F9H、A4H、B0H、99H、92H、83H、F8H、80H。并用89C51的P3.4、P3.5口分別控制74HC373允許輸入G與輸出控制/OE。
?74HC573特點(diǎn):
?·三態(tài)總線驅(qū)動輸出
?·置數(shù)全并行存取
?·緩沖控制輸入
?·使能輸入有改善抗擾度的滯后作用
??? 原理說明: M54HC563/74HC563/M54HC573/74HC573的八個(gè)鎖存器都是透明的D 型鎖存器,當(dāng)使能(G)為高時(shí),Q 輸出
??? 將隨數(shù)據(jù)(D)輸入而變。當(dāng)使能為低時(shí),輸出將鎖存在已建立的數(shù)據(jù)電平上。輸出控制不影響鎖存器的內(nèi)部工作,即老數(shù)據(jù)可以保持,甚至當(dāng)輸出被關(guān)閉時(shí),
??? 新的數(shù)據(jù)也可以置入。這種電路可以驅(qū)動大電容或低阻抗負(fù)載,可以直接與系統(tǒng)總線接口并驅(qū)動總線,而不需要外接口。特別適用于緩沖寄存器,I/O 通道,雙向總線驅(qū)動器和工作寄存器。74HC563引腳圖如3-5:
圖3-5 74HC573引腳圖
數(shù)碼顯示電路圖3-6。
圖3-6 數(shù)碼顯示電路
??? 編碼電路是采用紅外專用編碼M145026。用雙列16腳DIP封裝形式,電壓為4.5~18V,靜態(tài)電流為0.01UA。
主要特點(diǎn)如下:
(1) M145026在遙控應(yīng)用中分別作為編碼器使用。
(2) 能與射頻,超聲波或紅外的調(diào)制器接口。
(3) 在二進(jìn)制(0和1)或三元(0、1、開路)數(shù)據(jù)中,能按址操作。
(4) 為提高安全性,每個(gè)編碼序列數(shù)據(jù)字傳送兩次。
(5) 采用RC振蕩器,無需使用晶振振蕩器。
(6) 對外部元件的精度要求不高,允許有5%的誤差。
(7) 內(nèi)部電源接通后使自動復(fù)位,迫使譯碼器輸出高電平。
(8) 應(yīng)用領(lǐng)域范圍廣,如防盜系統(tǒng),數(shù)據(jù)傳輸,無線電路,安裝監(jiān)控及遙控等。
??? 在M145026構(gòu)成編碼電路中,一組編碼開關(guān)A1~A3端確定出5個(gè)地址碼,在D6~D9端子可確定4位二進(jìn)制數(shù)據(jù)碼,形成9行信息,這些信息通過在IC1的(14)腳上的控制開關(guān)S進(jìn)行發(fā)送。當(dāng)按下S時(shí)(14)腳接地;使能端TE輸入低電平信號,啟動發(fā)射時(shí)序,IC1的(15)腳將串行向IC2譯碼器發(fā)送這些信息。
?? 電路中采取編碼的發(fā)送與譯碼器直接有線傳輸工作方式,若需進(jìn)行長距離的有線傳輸還在增加一些輸入、輸出電路等。若進(jìn)行無線控制,還應(yīng)增加調(diào)制發(fā)射,接收解調(diào)及控制電路,在實(shí)際應(yīng)用中,根據(jù)實(shí)際應(yīng)用的需要來選擇使用的載體。
M145026是DIP18腳雙列直插芯片,1~8腳是8位地址編碼輸入端。每個(gè)腳有3個(gè)狀態(tài),即“0” 、“1”、“懸空”。這樣8個(gè)腳組合在一起可有(3的8次方)6561個(gè)地址編碼。10~13腳是數(shù)據(jù)編碼輸入端,每個(gè)腳有2個(gè)輸入狀態(tài)即“0” 、“1”。14腳是發(fā)射命令控制端。17腳是編碼輸出端。M145026引腳圖如圖3-7。M145026工作原理圖如圖3-8。
圖3-7? M145026引腳圖
圖3-8? M145026工作原理圖
?
?
?
編碼電路如圖3-9。
圖3-9 編碼電路
? 3.1.5 震蕩器
??? 555集成電路開始是作定時(shí)器應(yīng)用的,所以叫做555定時(shí)器或555時(shí)基電路。但后來經(jīng)過開發(fā),它除了作定時(shí)延時(shí)控制外,還可用于調(diào)光、調(diào)溫、調(diào)壓、調(diào)速等多種控制及計(jì)量檢測。此外,還可以組成脈沖振蕩、單穩(wěn)、雙穩(wěn)和脈沖調(diào)制電路,用于交流信號源、電源變換、頻率變換、脈沖調(diào)制等。由于它工作可靠、使用方便、價(jià)格低廉,目前被廣泛用于各種電子產(chǎn)品中,555集成電路內(nèi)部有幾十個(gè)元器件,有分壓器、比較器、基本R-S觸發(fā)器、放電管以及緩沖器等,電路比較復(fù)雜,是模擬電路和數(shù)字電路的混合體。
555集成電路是8腳封裝,雙列直插型,其中6腳稱閾值端(TH),是上比較器的輸入;2腳稱觸發(fā)端(TR),是下比較器的輸入;3腳是輸出端(Vo),它有O和1兩種狀態(tài),由輸入端所加的電平?jīng)Q定;7腳是放電端(DIS),它是內(nèi)部放電管的輸出,有懸空和接地兩種狀態(tài),也是由輸入端的狀態(tài)決定;4腳是復(fù)位端(MR),加上低電平時(shí)可使輸出為低電平;5腳是控制電壓端(Vc),可用它改變上下觸發(fā)電平值;8腳是電源端,1腳是地端。
我們也可以把555電路等效成一個(gè)帶放電開關(guān)的R-S觸發(fā)器,這個(gè)特殊的觸發(fā)器有兩個(gè)輸入端:閾值端(TH)可看成是置零端R,要求高電平,觸發(fā)端(TR)可看成是置位端S,要求低電平,有一個(gè)輸出端Vo,Vo可等效成觸發(fā)器的Q端,放電端(DIS)可看成是由內(nèi)部放電開關(guān)控制的一個(gè)接點(diǎn),由觸發(fā)器的Q端控制:Q=1時(shí)DIS端接地,Q=0時(shí)DIS端懸空。另外還有復(fù)位端MR,控制電壓端Vc,電源端VDD和
地端GND。這個(gè)特殊的觸發(fā)器有兩個(gè)特點(diǎn):
??? (1)兩個(gè)輸入端的觸發(fā)電平要求一高一低,置零端R即閾值端(TH)要求高電平,而置位端s即觸發(fā)端(TR)則要求低電乎;
(2)兩個(gè)輸入端的觸發(fā)電平使輸出發(fā)生翻轉(zhuǎn)的閾值電壓值也不同,當(dāng)Vc端不接控制電壓時(shí),對TH(R)端來講,>2/3VDD是高電平1,<2/3VDD是低電平0:而對TR(S)端來講,>1/3VDD是高電平1,<1/3VDD是低電平0。如果在控制端(Vc)上控制電壓Vc時(shí),這時(shí)上觸發(fā)電平就變成Vc值,下觸發(fā)電平就變成1/2Vc值,可? 見改變控制端的控制電壓值就可以改變上下觸發(fā)電平值。
3.1.5.1. 電路組成及工作原理:用施密特觸發(fā)器構(gòu)成的多諧振蕩器圖3-10。
圖3-10 用施密特觸發(fā)器構(gòu)成的多諧振蕩器
??? 3.1.5. 2. 振蕩頻率的估算
(1)電容充電時(shí)間T1。電容充電時(shí),時(shí)間常數(shù)τ1=(R1+R2)C,起始值vC(0+)=,終了值vC(∞)=VCC,轉(zhuǎn)換值vC(T1)=,帶入RC過渡過程計(jì)算公式進(jìn)行計(jì)算:
??????????????????? ??????????????(3-1)
(2) 電容放電時(shí)間T2
電容放電時(shí),時(shí)間常數(shù)τ2=R2C,起始值vC(0+)=,終了值vC(∞)=0,轉(zhuǎn)換值vC(T2)=,帶入RC過渡過程計(jì)算公式進(jìn)行計(jì)算:
????????????????????? ???????????????????????????????????(3-2)
(3)電路振蕩周期T
T=T1+T2=0.7(R1+2R2)C?????????????????? ?????????(3-3)
(4)電路振蕩頻率f
????????????????????? ?????????????????????????????(3-4)
(5)輸出波形占空比q
定義:q=T1/T,即脈沖寬度與脈沖周期之比,稱為占空比。
???????????????????? ????????????????????????????????(3-5)
帶入公式可以得到電阻R1=10M,R2=8M,電容的取值為1UF.多路遙控紅外發(fā)射多諧震蕩電路如圖3-11。
?圖3-11? 紅外遙控多路發(fā)射中多諧震蕩電路
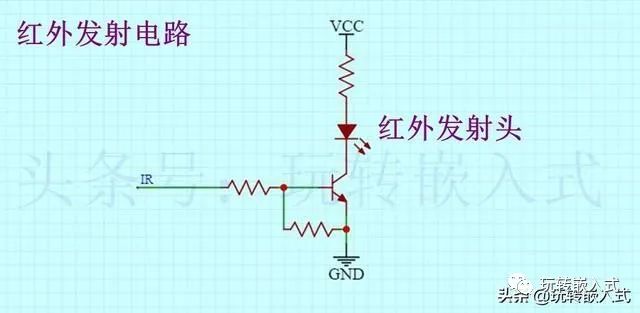
發(fā)射電路是由74HC00、三極管Q1和紅外發(fā)射管組成。使用74HC00的與非門4和與非門3構(gòu)成調(diào)制電路。其作用是:經(jīng)過紅外專用編碼器M145026編碼的調(diào)制信號和由555構(gòu)成的多諧震蕩電路產(chǎn)生的40KHZ的載波信號,將二信號調(diào)制成已調(diào)信號。調(diào)制的波形如圖3-12,其中A是調(diào)制信號,B是載波,C是已調(diào)信號。74HC00引腳功能圖如圖3-13。74HC00內(nèi)部結(jié)構(gòu)圖如圖3-14。
?
圖3-12 紅外多路遙控調(diào)制的波形
圖3-13? 74HC00引腳功能
圖3-14? 74HC00內(nèi)部結(jié)構(gòu)圖
紅外發(fā)射電路工作過程:是將紅外專用編碼器輸出的調(diào)制信號送入74HC00的12腳和555構(gòu)成的多諧振蕩電路產(chǎn)生的40KHZ載波送入74HC00的13腳,經(jīng)過兩個(gè)與非門的調(diào)制形成已調(diào)信號。其中這兩個(gè)與非門還有隔離的作用。將已調(diào)信號送入以Q2? 為核心組成的功率放大器放大,在紅外發(fā)光二極管將電信號轉(zhuǎn)化為光信號并發(fā)射出去。紅外發(fā)射電路如圖3-15。
圖3-15 紅外發(fā)射電路
??? 多路遙控接收電路主要是由多路紅外接收電路、放大電路、紅外解碼電路、單片機(jī)接收小系統(tǒng)和數(shù)碼顯示電路組成。
??? 由光敏二極管和CX20106紅外線遙控接收前置放大電路. 光敏二極管主要是接收由發(fā)射電路發(fā)射的信息,送給CX20106進(jìn)行前置放大。CX20106紅外線遙控接收前置放大電路,多適用于電視機(jī)。內(nèi)部電路由前置放大器,自動偏置電平控制電路(ABLC)、限幅放大器、帶通濾波器、峰值檢波器和波形整形電路等組成。CX20106是CX20106的改進(jìn)型,二者之間的主要差別在于電參數(shù)略有不同。CX20106也同樣適用于超聲波測試,主要頻率在38KHZ~41KHZ,在超聲波應(yīng)用中通常選取40KHZ。
CX20106A紅外線遙控接收前置放大電路,多適用于電視機(jī)。內(nèi)部電路由前置放大器,自動偏置電平控制電路(ABLC)、限幅放大器、帶通濾波器、峰值檢波器和波形整形電路等組成。CX20106A是CX20106的改進(jìn)型,二者之間的主要差別在于電參數(shù)略有不同。CX20106A也同樣適用于超聲波測試,主要頻率在38KHZ~41KHZ,在超聲波應(yīng)用中通常選取40KHZ。
CX20106內(nèi)部圖3-16。
圖3-16? CX20106內(nèi)部結(jié)構(gòu)框圖
CX20106引腳功能:
1腳-----超聲信號輸入端,該腳的輸入阻抗約為40kΩ。
2腳-----該腳與地之間連接RC串聯(lián)網(wǎng)絡(luò),它們是負(fù)反饋串聯(lián)網(wǎng)絡(luò)的一個(gè)組成部分,改變它們的數(shù)值能改變前置放大器的增益和頻率特性。增大電阻R1或減小C1,將使負(fù)反饋量增大,放大倍數(shù)下降,反之則放大倍數(shù)增大。但C1的改變會影響到頻率特性,一般在實(shí)際使用中不必改動,推薦選用參數(shù)為R1=4.7Ω,C1=1μF。
3腳-----該腳與地之間連接檢波電容,電容量大為平均值檢波,瞬間相應(yīng)靈敏度低;若容量小,則為峰值檢波,瞬間相應(yīng)靈敏度高,但檢波輸出的脈沖寬度變動大,易造成誤動作,推薦參數(shù)為3.3μf。
4腳-----接地端。
5腳-----該腳與電源間接入一個(gè)電阻,用以設(shè)置帶通濾波器的中心頻率F0,阻值越大,中心頻率越低。例如,取R=200kΩ時(shí),F(xiàn)0≈42kHz,若取R=220kΩ,則中心頻率F0≈38kHz。
6腳-----該腳與地之間接一個(gè)積分電容,標(biāo)準(zhǔn)值為330pF,如果該電容取得太大,會使探測距離變短。
7腳-----遙控命令輸出端,它是集電極開路輸出方式,因此該引腳必須接上一個(gè)上拉電阻到電源端,推薦阻值為22kΩ,沒有接受信號是該端輸出為高電平,有信號時(shí)則產(chǎn)生下降。
8腳-----電源正4.5~5.5V 極。
?? ?紅外多路遙控接收電路的工作過程:由光敏二極管將紅外發(fā)射電路發(fā)射的光信號轉(zhuǎn)化為電信號,從1腳輸入到CX20106里面,CX20106的2腳是由電阻R1和C1組成的負(fù)反饋電路,將得到電信號進(jìn)行預(yù)放大。CX20106的三腳是外接C2的電解電容,作用是將經(jīng)過預(yù)放大的電信號進(jìn)行濾波,從而得到的純正的電信號。最后經(jīng)過CX20106的8腳輸出。紅外接收電路如圖3-17。
圖3-17? 紅外接收電路
?放大電路采用的同向比例運(yùn)放。放大電路如圖3-18。
圖3-18? 放大電路
信號電壓通過電阻R16加到運(yùn)放的同相輸入端,輸出電壓vo通過電阻R14和R11反饋到運(yùn)放的反相輸入端,構(gòu)成電壓串聯(lián)負(fù)反饋放大電路。
同相比例運(yùn)算電路的特點(diǎn)如下:
1.輸入電阻很高,輸出電阻很低。
2.由于,電路不存在虛地,且運(yùn)放存在共模輸入信號,因此要求運(yùn)放有較高的共模抑制比。
根據(jù)虛短、虛斷的概念有,????????????????????????? (3-6)
?? ?????????????????????????????????????????????(3-7)
于是求得?
?????????????????????????????????????????????????? (3-8)
要使放大器的放大倍數(shù)達(dá)到60倍,根據(jù)上述的公式可以得到電阻的阻值。
解碼電路是采用和編碼芯片M145026成對的解碼芯片M145027芯片為核心和外圍電路組成。主要是對光敏二級管接收到信息經(jīng)過前置放大、放大器的放大已經(jīng)達(dá)到解碼器的倍率,從而恢復(fù)出發(fā)射電路發(fā)出的信息和功能,去控制控制電路。
M145027需與M155026配合使用,管腳排列圖與M155026象似,也是DIP18腳雙列直插芯片。其1~8腳是8位地址編碼輸入端,使用時(shí)其狀態(tài)與M155026的1~8腳地址狀態(tài)完全對應(yīng),否則M145027不譯碼。14腳是信息碼輸入端。10~13腳及17腳是譯碼輸出端。15、16腳是內(nèi)置振蕩器電阻輸入端,使用時(shí)必須與M155026的15、16腳的電阻保持一致。當(dāng)M145027譯碼到的地址(M155026的地址編碼)與自己的地址編碼對應(yīng)時(shí),接收到的M155026的10~13腳的輸入狀態(tài)就鎖存到M145027的10~13腳,直到M155026的10~13腳的輸入狀態(tài)再次改變并被M145027接收到。同時(shí)當(dāng)M145027譯碼到的地址與自己的地址編碼對應(yīng)時(shí),17腳就輸出高電平,但不保持,一旦M145027接收不到該信息,17腳就返回到底電平。根據(jù)這一特點(diǎn),設(shè)計(jì)者可以根據(jù)自己的邏輯需要選擇合適的控制端。
根據(jù)以上介紹可以知道,同一個(gè)由M155026組成的遙控發(fā)射器,通過選擇不同的地址編碼,可以控制6561個(gè)由M145027組成的遙控接收器,進(jìn)而可以控制多達(dá)6561個(gè)對象。應(yīng)用非常方便。
M145027引腳功能圖3-19。M145027內(nèi)部功能如圖3-20。
圖 3-19? M145027引腳功能
圖 3-20? M145027內(nèi)部功能
多路遙控紅外接收解碼電路如圖3-21。
圖3-21 多路遙控紅外接收解碼電路
?
?顯示電路是由于MAX7219和八只數(shù)碼管組成。
?MAX7219是MAXIM公司生產(chǎn)的串行輸入/輸出共陰極數(shù)碼管顯示驅(qū)動芯片,一片MAX7219可驅(qū)動8個(gè)7段(包括小數(shù)點(diǎn)共8段)數(shù)字LED、LED條線圖形顯示器、或64個(gè)分立的LED發(fā)光二級管。該芯片具有10MHz傳輸率的三線串行接口可與任何微處理器相連,只需一個(gè)外接電阻即可設(shè)置所有LED的段電流。它的操作很簡單,MCU只需通過模擬SPI三線接口就可以將相關(guān)的指令寫入MAX7219的內(nèi)部指令和數(shù)據(jù)寄存器,同時(shí)它還允許用戶選擇多種譯碼方式和譯碼位。此外它還支持多片7219串聯(lián)方式,這樣MCU就可以通過3根線(即串行數(shù)據(jù)線、串行時(shí)鐘線和芯片選通線)控制更多的數(shù)碼管顯示。MAX7219的外部引腳分配如圖3-22所示及內(nèi)部結(jié)構(gòu)如圖3-23所示。
圖3-22? MAX7219的外部引腳分配?
圖3-23?? MAX7219的內(nèi)部引腳分配
各引腳的功能為:
DIN:串行數(shù)據(jù)輸入端
DOUT:串行數(shù)據(jù)輸出端,用于級連擴(kuò)展
LOAD:裝載數(shù)據(jù)輸入
CLK:串行時(shí)鐘輸入
DIG0~DIG7:8位LED位選線,從共陰極LED中吸入電流
SEG A~SEG G DP:7段驅(qū)動和小數(shù)點(diǎn)驅(qū)動
ISET:通過一個(gè)10k電阻和Vcc相連,設(shè)置段電流
?? 控制顯示電路如圖圖3-24。
圖3-24? 紅外接收控制顯示電路
3.3 紅外多路遙控發(fā)射與接收系統(tǒng)整機(jī)電路
???? 紅外多路遙控發(fā)射電路見附錄I,紅外多路遙控接收電路見附錄II。
本章主要是針對第二章的系統(tǒng)方框圖對應(yīng)來設(shè)計(jì)各個(gè)小部分的。最后達(dá)到將本系統(tǒng)設(shè)計(jì)全面。本系統(tǒng)主要分為兩個(gè)大部分,一是多路紅外遙控發(fā)射部分,二是多路紅外接收電路。
?
軟件設(shè)計(jì)有兩種方法:一種是自上而下,逐步細(xì)化;一種是自下而上,先設(shè)計(jì)出每一個(gè)具體的模塊(子程序),然后再慢慢擴(kuò)大,最后組成一個(gè)系統(tǒng)。在本設(shè)計(jì)中我用自下而上的設(shè)計(jì)方法。首先設(shè)計(jì)出一個(gè)延時(shí)子程序,再設(shè)計(jì)顯示子程序,最后組成一個(gè)按鍵查詢程序。當(dāng)然在編程之前要先畫程序流程圖。
畫程序流程圖是程序設(shè)計(jì)的一個(gè)重要組成部分,而且決定成敗的關(guān)鍵部分。畫程序流程圖的過程就是進(jìn)行程序的邏輯設(shè)計(jì)過程,這中間的任何錯(cuò)誤或忽視均將導(dǎo)致程序出錯(cuò)或可靠性下降。因此,真正的程序設(shè)計(jì)過程是流程圖設(shè)計(jì),而上機(jī)編程是將設(shè)計(jì)好的程序流程圖轉(zhuǎn)換成程序設(shè)計(jì)語言而已。
正確的流程圖畫法是先粗后細(xì)、一步一個(gè)足印,只考慮邏輯結(jié)構(gòu)和算法,不考慮或少考慮具體指令。這樣畫流程圖就可以集中精力考慮程序的結(jié)構(gòu),從根本上保證程序的合理性和可靠性。接下來就是進(jìn)行指令代換,這時(shí)只要消除語法錯(cuò)誤,一般就能順利編出源程序。
?主控程序的設(shè)計(jì)思想:發(fā)射控制程序主要用到了獨(dú)立式按鍵查詢程序、延時(shí)程序和查表顯示程序。用89C51單片機(jī)的P1口作為按鍵的輸入,P0口作為顯示輸出,P2口作為鍵值的BCD碼輸出和控制輸出。用寄存器R0作為計(jì)數(shù)器,初值為零,在每次測試有無按鍵按下之前加1,直到加到7為止,然后又從零開始加,是為了顯示查表子程序中查表的目的。主程序流程框圖如圖4-1。
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
圖4-1 主程序流程框圖
由于此系統(tǒng)要求是對8路信號的遙控,在編程時(shí)沒有用到八位二進(jìn)制數(shù)到四位BCD碼的轉(zhuǎn)換。只判斷輸入健值,然后將其對應(yīng)的四位BCD碼送P3口的低四位輸出。P5用做鎖存器74HC573和編碼器? M145026的輸出控制,當(dāng)有信號要發(fā)射時(shí)此端口為低電平。P3.4用做控制74HC573的允許輸入端,高電平有效。鍵盤掃描程序流程框圖4-2。
圖4-2? 4*4矩陣鍵盤按鍵查詢程序框圖
?????????????? ??圖4-3 ?延時(shí)程序框圖 ??
查表顯示電路的程序如下:
DISP:????????????????????????? ;顯示子程序
PUSH SP?????????????????????
PUSH PSW????????????????????
MOV DPTR,#TAB????????????
MOV A,R0?????
MOVC A,@A+DPTR???? ;查表
MOV P2,A????????????? ;將測試到的信號的十六進(jìn)制送P2口,顯示輸出
POP PSW???????????????????????
POP SP????????????????????????
RET??????????????????????????? ;返回
TAB:
?? DB? 0F9H,0A4H,0B0H,99H,92H,83H,0F8H,80H
END
如下是延時(shí)子程序:
DELAY:???????????? ;延時(shí)子程序
MOV R7, #01H???????????
D1:
MOV R6, #0FFH
D2:
DJNZ? R6,$?? ?????????????;R6減于1不等于零則轉(zhuǎn)移
DJNZ? R7,D1?????????????? ;R7減于1不等于零則轉(zhuǎn)移
RET???????????????????????? ;返回
譯碼的工作過程是,由AT89C51將解調(diào)后的編碼讀入,再由內(nèi)部程序?qū)⒆x入的編碼譯成相應(yīng)的路控制信號,由于編碼的就是鍵值,因此可用查表程序?qū)㈡I值轉(zhuǎn)換成相應(yīng)的控制信號并用識別標(biāo)志位的方法,識別鍵值所對應(yīng)的控制方式,譯碼程序流程如圖4-4。
圖4-4 ?譯碼程序流程
?紅外多路遙控接收顯示程序,由于要求是多路,所以接收顯示采用八只數(shù)碼管來作為接收顯示。本電路采用多個(gè)數(shù)碼管驅(qū)動芯片MAX7219。只需單片機(jī)的三個(gè)端口就可以控制,及DIN:串行數(shù)據(jù)輸入端、LOAD:裝載數(shù)據(jù)輸入、CLK:串行時(shí)鐘輸入。就可以同時(shí)控制八只數(shù)碼管的不同的顯示,大大減少硬件電路的復(fù)雜度。
下面介紹MAX7219的芯片的程序要求和用法。
MAX7219內(nèi)部的寄存器如圖3-4,主要有:譯碼控制寄存器、亮度控制寄存器、掃描界限寄存器、關(guān)斷模式寄存器、測試控制寄存器。編程時(shí)只有正確操作這些寄存器,MAX7219才可工作。?
分別介紹如下:
(1)譯碼控制寄存器(X9H)
MAX7219有兩種譯碼方式:B譯碼方式和不譯碼方式。當(dāng)選擇不譯碼時(shí),8個(gè)數(shù)據(jù)為分別一一對應(yīng)7個(gè)段和小數(shù)點(diǎn)位;B譯碼方式是BCD譯碼,直接送數(shù)據(jù)就可以顯示。實(shí)際應(yīng)用中可以按位設(shè)置選擇B譯碼或是不譯碼方式。
(2)掃描界限寄存器(XBH)
此寄存器用于設(shè)置顯示的LED的個(gè)數(shù)(1~8),比如當(dāng)設(shè)置為0xX4時(shí),LED 0~5顯示。?
(3)亮度控制寄存器(XAH)
共有16級可選擇,用于設(shè)置LED的顯示亮度,從0xX0~0xXF
(4)關(guān)斷模式寄存器(XCH)
共有兩種模式選擇,一是關(guān)斷狀態(tài),(最低位 D0=0)一是正常工作狀態(tài)(D0=1)。
(5) 顯示測試寄存器(XFH)
用于設(shè)置LED是測試狀態(tài)還是正常工作狀態(tài),當(dāng)測試狀態(tài)時(shí)(最低位 D0=1)各位顯示全亮,正常工作狀態(tài)(D0=0)。
各寄存器具體操作見驅(qū)動程序詳解。
??? 讀寫時(shí)序說明
MAX7129是SPI總線驅(qū)動方式。它不僅要向寄存器寫入控制字,還需要讀取相應(yīng)寄存器的數(shù)據(jù)。
??要想與MAX7129通信,首先要先了解MAX7129的控制字。MAX7129的控制字格式如圖4-5。
圖4-5 ?控制字(即地址及命令字節(jié))?
如圖,工作時(shí),MAX7219規(guī)定一次接收16位數(shù)據(jù),在接收的16位數(shù)據(jù)中:D15~D12可以與操作無關(guān),可以任意寫入,D11~D8決定所選通的內(nèi)部寄存器地址,D7~D0為待顯示數(shù)據(jù)或是初始化控制字。在CLK脈沖作用下,DIN的數(shù)據(jù)以串行方式依次移入內(nèi)部16位寄存器,然后在一個(gè)LOAD上升沿作用下,鎖存到內(nèi)部的寄存器中。注意在接收時(shí),先接收最高位D16,最后是D0,因此,在程序發(fā)送時(shí)必須先送高位數(shù)據(jù),在循環(huán)移位。工作時(shí)序圖見圖4-6。
由于51是8位單片機(jī)故需要分兩次來送數(shù)據(jù)。具體操作見驅(qū)動程序詳解。
圖4-6? 數(shù)據(jù)讀寫時(shí)序
?????? 接收部分的程序設(shè)計(jì)
?????? 設(shè)計(jì)思想:接收控制的輸入用89C51的P1口低四位(P1.3~P1.0),P0.0是MAX7219串行數(shù)據(jù)輸入端,P0.1是MAX7329裝載數(shù)據(jù)輸入端,P0.2是MAX7219串行時(shí)鐘輸入端,判斷P0.1口和P0,.2口就可以知道是哪路信號,MAX7219就可以控制對應(yīng)數(shù)碼管。MAX7219控制真值表4-7:
表4-7 ?MXA7219控制真值表
??? 圖4-6中X表示任意狀態(tài);CS表示裝載數(shù)據(jù)輸入端低電平有效;CLK表示串行時(shí)鐘上升沿有效;DIN-H表示串行數(shù)據(jù)的高八位,其中高四位是任意狀態(tài)、底四位是數(shù)碼管的位選信號;DIN-L表示串行數(shù)碼的底八位,及是數(shù)碼管的段選信號。紅外多路遙控接收的程序流程框圖如圖4-8。
?????? 圖4-8 ?紅外多路遙控接收程序流程框圖
紅外多路發(fā)射與接收系統(tǒng)的程序清單見附錄V。
?? 本章主要是對多路紅外遙控發(fā)射與接收系統(tǒng)的軟件設(shè)計(jì)。先繪出各個(gè)部分的程序流程圖和部分的子程序設(shè)計(jì)。
?
雙擊桌面上的Keil uVision2 圖標(biāo)或者單擊屏幕左下方的“開始”→“程序”→“Keil uVision2”,隨后就進(jìn)入了Keil uVision2 集成環(huán)境。?
Keil uVision2的工作界面是一種標(biāo)準(zhǔn)的Windows界面,包括:標(biāo)題欄、主菜單、標(biāo)準(zhǔn)工具欄、代碼窗口等。
關(guān)于該軟件的使用,與學(xué)習(xí)其他軟件的方法沒有多大區(qū)別,當(dāng)然我們也不是每個(gè)功能都使用,沒必要逐一介紹,下面舉一個(gè)例子說明使用就行了,如果想詳細(xì)了解,請搜索其詳細(xì)使用資料。
①建立一個(gè)新工程
單擊Project菜單,在彈出的下拉菜單中選中New Project選項(xiàng)圖5-1。
圖5-1?New Project選項(xiàng)
②確定之后選擇你要保存的路徑,輸入工程文件的名字,比如保存到“多路紅外發(fā)射與接收系統(tǒng)”目錄里,工程文件的名字為“多路紅外發(fā)射與接收系統(tǒng)”,然后點(diǎn)擊保存。
③隨后會彈出一個(gè)對話框,要求你選擇單片機(jī)的型號,你可以根據(jù)你使用的單片機(jī)來選擇,KeilC51幾乎支持所有的52核的單片機(jī),由于Proteus選用AT89C52原理圖,那么選擇AT89C52之后,右邊欄是對這個(gè)單片機(jī)的基本的說明,然后點(diǎn)擊確定即可, 選擇單片機(jī)的型號圖5-2。
圖5-2? 選擇單片機(jī)的型號
④)完成上一步驟后,工程到此就已經(jīng)創(chuàng)建起來了,其屏幕如下圖5-3所示。
圖5-3? 已創(chuàng)建好的工程
⑤工程雖然已經(jīng)創(chuàng)建好,即已經(jīng)建立好了一個(gè)工程來管理多路紅外發(fā)射與接收系統(tǒng)這樣一個(gè)項(xiàng)目,但我們還沒寫一行程序,因此還需要建立相應(yīng)的C文件或匯編文件。下面我們就來新建一個(gè)C文件,新建之后并保存。
?
⑥添加文件到工程
把剛才新建的led.c添加到工程來。
⑦打開led.c文件,輸入C代碼,完成之后輸入源代碼圖5-4。
圖5-4? 輸入源代碼
⑧單擊“Project”菜單,再在下拉菜單中單擊“ ” 在下圖中,單擊“Output”中單擊“Create HEX File” 選項(xiàng),使程序編譯后產(chǎn)生HEX代碼,以便在Proteus里加載可執(zhí)行代碼,并單擊“Target”選項(xiàng),更改晶振頻率(本例使用12M晶振),修改晶振頻率圖5-5。所示。
圖5-5? 修改晶振頻率
到此,設(shè)置工作已完成,下面我們將編譯、鏈接、轉(zhuǎn)換成可執(zhí)行文件(.HEX的
件)。
⑨編譯、鏈接、生成可執(zhí)行文件
圖5-6 編譯、鏈接、生成可執(zhí)行文件圖標(biāo)
依次單擊圖5-6所示圖標(biāo),如果沒有語法錯(cuò)誤,將會生成可執(zhí)行文件,即本例可執(zhí)行文件為“多路紅外發(fā)射程序.hex”。
雙擊桌面上的ISIS 7 Professional圖標(biāo)或者單擊屏幕左下方的“開始”→“程序”→“Proteus 7 Professional” →“ISIS 7 Professional”,隨后就進(jìn)入了Proteus ISIS集成環(huán)境。
Proteus ISIS的工作界面是一種標(biāo)準(zhǔn)的Windows界面。包括:標(biāo)題欄、主菜單、標(biāo)準(zhǔn)工具欄、繪圖工具欄、狀態(tài)欄、對象選擇按鈕、預(yù)覽對象方位控制按鈕、仿真進(jìn)程控制按鈕、預(yù)覽窗口、對象選擇器窗口、圖形編輯窗口。Proteus ISIS的工作界面圖5-7。
圖5-7? Proteus ISIS的工作界面
①將所需元器件加入到對象選擇器窗口。Picking Components into the Schematic單擊對象選擇器按鈕 ,添加元器件圖5-8。
圖5-8 添加元器件
彈出“Pick Devices”頁面,在“Keywords”輸入AT89C,系統(tǒng)在對象庫中進(jìn)行搜索查找,并將搜索結(jié)果顯示在“Results”中。添加元器件圖5-8。
在“Results”欄中的列表項(xiàng)中,雙擊“AT89C52”,則可將“AT89C52”添加至對象選擇器窗口。
接著在“Keywords”欄中重新輸入LED。雙擊“LED-BLUE”,則可“LED-BLUE”(LED數(shù)碼管)添加至對象選擇器窗口,使用同樣的方法,把10WATT470R電阻添加至對象選擇器窗口。
經(jīng)過以上操作,在對象選擇器窗口中,已有了AT89C52、LED-BLUE、10WATT470R三個(gè)元器件對象,若單擊AT89C52,在預(yù)覽窗口中,見到AT89C51的實(shí)物圖,單擊其他兩個(gè)器件,都能瀏覽到實(shí)物圖。此時(shí),我們已注意到在繪圖工具欄中的元器件按鈕 處于選中狀態(tài)。
②放置元器件至圖形編輯窗口Placing Components onto the Schematic
在對象選擇器窗口中,選中AT89C52,將鼠標(biāo)置于圖形編輯窗口該對象的欲放位置、單擊鼠標(biāo)左鍵,該對象被完成放置。。同理,將LED-BLUE和10WATT470R放置到圖形編輯窗口中。
若對象位置需要移動,將鼠標(biāo)移到該對象上,單擊鼠標(biāo)右鍵,此時(shí)我們已經(jīng)注意到,該對象的顏色已變至紅色,表明該對象已被選中,按下鼠標(biāo)左鍵,拖動鼠標(biāo),將對象移至新位置后,松開鼠標(biāo),完成移動操作。
單擊繪圖工具欄中的總線按鈕 ,使之處于選中狀態(tài)。將鼠標(biāo)置于圖形編輯窗口,單擊鼠標(biāo)左鍵,確定總線的起始位置;移動鼠標(biāo),屏幕出現(xiàn)粉紅色細(xì)直線,找到總線的終了位置,單擊鼠標(biāo)左鍵,再單擊鼠標(biāo)右鍵,以表示確認(rèn)并結(jié)束畫總線操作。此后,粉紅色細(xì)直線被藍(lán)色的粗直線所替代。
④元器件之間的連線Wiring Up Components on the Schematic
Proteus的智能化可以在你想要畫線的時(shí)候進(jìn)行自動檢測。下面,我們來操作將電阻R1的上端連接到D1數(shù)碼管下端。當(dāng)鼠標(biāo)的指針靠近R1上端的連接點(diǎn)時(shí),跟著鼠標(biāo)的指針就會出現(xiàn)一個(gè)“×”號,表明找到了R1的連接點(diǎn),單擊鼠標(biāo)左鍵,移動鼠標(biāo)(不用拖動鼠標(biāo)),將鼠標(biāo)的指針靠近D1的下端的連接點(diǎn)時(shí),跟著鼠標(biāo)的指針就會出現(xiàn)一個(gè)“×”號,表明找到了D1的連接點(diǎn),同時(shí)屏幕上出現(xiàn)了粉紅色的連接,單擊鼠標(biāo)左鍵,粉紅色的連接線變成了深綠色,那么,就完成了本次連線。
Proteus具有線路自動路徑功能(簡稱WAR),當(dāng)選中兩個(gè)連接點(diǎn)后,WAR將選擇一個(gè)合適的路徑連線。WAR可通過使用標(biāo)準(zhǔn)工具欄里的“WAR”命令按鈕 來關(guān)閉或打開,也可以在菜單欄的“Tools”下找到這個(gè)圖標(biāo)。
同理,我們可以完成其它連線。在此過程的任何時(shí)刻,都可以按ESC鍵或者單擊鼠標(biāo)的右鍵來放棄畫線。
⑤元器件與總線連接
單擊繪圖工具欄中的導(dǎo)線標(biāo)簽按鈕 ,使之處于選中狀態(tài)。將鼠標(biāo)置于圖形編輯窗口的元件的一端,移動鼠標(biāo),然后連接到總線上,在接著移動鼠標(biāo)到元件與總線連接線上的某一點(diǎn),將會出現(xiàn)一個(gè)“×”號。元器件與總線的連接圖5-9。
?
圖5-9 元器件與總線的連接
表明找到了可以標(biāo)注的導(dǎo)線,單擊鼠標(biāo)左鍵,彈出編輯導(dǎo)線標(biāo)簽窗口,在“string”欄中,輸入標(biāo)簽名稱,單擊“OK”按鈕,結(jié)束對該導(dǎo)線的標(biāo)簽標(biāo)定。同理,可以標(biāo)注其它導(dǎo)線的標(biāo)簽。注意,在標(biāo)定導(dǎo)線標(biāo)簽的過程中,相互接通的導(dǎo)線必須標(biāo)注相同的標(biāo)簽名。我們知道,具有相同的標(biāo)號,電氣是連接的,這一點(diǎn)在protel繪制原理圖時(shí),體現(xiàn)得尤為明顯。導(dǎo)線標(biāo)簽窗口圖5-10。
圖5-10 導(dǎo)線標(biāo)簽窗口
至此,我們便完成了整個(gè)電路圖的繪制。
本章主要針對本設(shè)計(jì)使用的主要兩個(gè)軟件KELL和Proteus的簡單的使用方法。
?
?
?
?
?
?
?
?
?
?
?
?
根據(jù)設(shè)計(jì)計(jì)算的元件參數(shù)組裝電路(應(yīng)盡量按照電路的形式與順序布線)。通電前,先用萬用表檢測連接導(dǎo)線是否接觸良好,然后接觸電源。在安裝電路時(shí)要注意將數(shù)字信號與模擬信號隔離,即兩部分不能交叉安裝,數(shù)字信號的地線也應(yīng)與模擬信號的地線分開,電源間要加去耦電路。晶體諧振器形成的干擾一般很大,應(yīng)將其外殼接地。
整機(jī)電路的設(shè)計(jì)計(jì)算順序一般是從末級單元電路開始,向前逐級進(jìn)行。而電路的裝調(diào)順序一般從前極單元電路開始,向后逐級進(jìn)行。電路的調(diào)試順序?yàn)橄确旨壵{(diào)整單元電路的靜態(tài)工作點(diǎn),測量其性能參數(shù);然后再逐級進(jìn)行聯(lián)調(diào),直到整機(jī)調(diào)試;最后進(jìn)行整機(jī)技術(shù)指標(biāo)測試,由于功放運(yùn)用的是折線分析方法,其理論計(jì)算為近似值。
調(diào)試分為程序調(diào)試與電路調(diào)試。在程序調(diào)試時(shí),一定要注意各條指令執(zhí)行過程中的時(shí)序配合。可按各子程序的功能設(shè)置若干個(gè)斷點(diǎn),先分步調(diào)試,然后再逐級聯(lián)調(diào)。待聯(lián)調(diào)合格后再進(jìn)行發(fā)端和收端的有線調(diào)試,即把發(fā)射部分的輸出信號Dout送到接收部分的Din,依次按控制鍵,收,發(fā)兩端應(yīng)有與所按鍵一致的路顯示或狀態(tài)顯示。
軟件調(diào)試的順序是子程序、中斷程序、算法功能模塊和主程序。
本系統(tǒng)中所涉及的子程序都與外部的芯片相關(guān),利用仿真器在環(huán)境下調(diào)試,檢查它們是否驅(qū)動硬件正常工作。
在發(fā)射電路仿真調(diào)試中,任意輸入一個(gè)想要顯示的數(shù)字,編寫到一個(gè)簡單的程序看數(shù)碼管能否顯示這個(gè)數(shù)。顯示,則顯示電路問題。如顯示4的程序:
ORG 0000H
START:?
MOV P2, #99H
MOV P3, #0D4H
END
P2口的功能是送出所顯示的數(shù)字,P3口功能是控制鎖存器工作和輸出控制信號的BCD碼。用萬用表和示波器等測試各個(gè)管腳是否輸出正確。顯示部分的測試從89C51的P2口開,經(jīng)鎖存器到數(shù)碼管各管腳;紅外發(fā)射部分從89C51的P3口查,依次到M145026輸入端、輸出端,再到脈碼調(diào)制的輸出,最后到紅外發(fā)射電路。能得到結(jié)果,則電路正確,否則相反,要改之。紅外發(fā)射系統(tǒng)的調(diào)試可按照控制代碼→編碼→脈碼調(diào)制→紅外發(fā)射的順序進(jìn)行調(diào)試。
?? 在接收電路中編寫以下簡單程序可測試接收能否正確控制。
ORG 0000H
START:
MOV P2, #0FFH
CLR P2.0/ (P2.1~P2.7)???? ;P2.0~P2.7中任意一個(gè)清零
END
此程序的功能是將P2口的任意一端清零。目的是使與之相連的二幾極管發(fā)亮,即能否控制被控制設(shè)備工作。紅外接收機(jī)的調(diào)試應(yīng)先調(diào)接收電路的增益和接收中心頻率。從CX20106第1腳送入,頻率為40KHz,峰峰值為0.2mV的信號(可將信號源輸出分壓)用示波器在第5腳測輸出,其增益應(yīng)大于70dB。保持信號源輸出幅度不變,調(diào)節(jié)信號源頻率在30KHz至50KHz之間變化,輸出電壓應(yīng)在頻率為40KHz點(diǎn)最大,否則調(diào)整R2使其在頻率為40KHz時(shí)輸出最大。注意:信號源輸出,分壓電路以及與電路的連線應(yīng)盡可能短,以免引入干擾影響測量。
系統(tǒng)發(fā)射器與接收器的編碼器M145026/M145027是配對使用,因此必需保持二者信號匹配。首先在電路中二者第(15)、(16)腳外接的振蕩電阻要求一致,誤差最好小于1%。此外,發(fā)射器與接收器的中心頻率也必需相一致。圖中發(fā)射器載頻可以通過RP調(diào)整到約為40KHZ,接收器的接收中心頻率可以通過RP1調(diào)整。系統(tǒng)安裝好后,在3米左右調(diào)整發(fā)射接收正常,然后拉開距離,仔細(xì)調(diào)整發(fā)射機(jī)RP的電阻,最終使控制距離在10米以上。為了要達(dá)到遠(yuǎn)距離遙控,除了增加發(fā)射機(jī)的發(fā)射功率外,還采取了增加發(fā)射扇區(qū)的措施,并對接收機(jī)接收到的紅外控制信號進(jìn)行了一定的聚焦處理,使達(dá)到接收機(jī)較分散的紅外光束能聚焦于一個(gè)較小的面積,以提高接收功率,增強(qiáng)接收效果。為了提高電路的可靠性,對電路中使用的元件進(jìn)行了認(rèn)真的性能挑選,并進(jìn)行了老化處理,采用了光電隔離,增加抗干擾能力及其它保護(hù)性措施。
整個(gè)電路裝在金屬屏蔽、密封箱內(nèi),具有較好的抗電磁干擾和防潮能力。對電源功率模塊進(jìn)行了散熱處理。
測試譯碼顯示電路時(shí),首先應(yīng)該測試筆段工作是否正常,如共陰極的發(fā)光二極管顯示器,可以將陰極接地,再將各筆段通過1千歐電阻接電源正極+VDD,各筆段應(yīng)亮。再將譯碼器的數(shù)據(jù)輸入端依次輸入0001~1001,則顯示器對應(yīng)顯示1~9數(shù)字。
6.3 整機(jī)聯(lián)調(diào)及數(shù)據(jù)分析
在所有的子程序和中斷服務(wù)程序都調(diào)試完畢后,還需要用主程序?qū)⑺鼈冞B接在一起,進(jìn)行整體調(diào)試,檢查各個(gè)模塊之間、各中斷服務(wù)程序之間是否存在相互影響,是否會出現(xiàn)程序之間的交叉錯(cuò)誤。整體調(diào)試采用逐步擴(kuò)大的方法,每次只增加一個(gè)功能模塊,在調(diào)試正確后再加入下一個(gè)模塊,直至將所有程序都與主程序連接起來。若整體調(diào)試通過,則說明軟件系統(tǒng)基本正確:若不能通過,則需要按照連接時(shí)的相反的順序逐次將子程序模塊與主程序分離,直到發(fā)現(xiàn)出錯(cuò)原因。程序調(diào)試正確后將其寫進(jìn)AT89C51,最后進(jìn)行系統(tǒng)聯(lián)調(diào)。
系統(tǒng)在聯(lián)調(diào)時(shí),可先將編、解碼電路進(jìn)行有線聯(lián)調(diào),即將紅外發(fā)射機(jī)編碼器的輸出與紅外接收機(jī)解碼器的輸入直接相連,按各路按鍵,所對應(yīng)的發(fā)光二極管能亮、滅轉(zhuǎn)換。有線聯(lián)調(diào)正確后,則可進(jìn)行無線聯(lián)調(diào)。
在無線聯(lián)調(diào)時(shí)常見的故障是遙控距離較短,不滿足要求,一般可通過增大紅外發(fā)射電流,或?qū)讉€(gè)紅外發(fā)射管串聯(lián)發(fā)射等增強(qiáng)紅外發(fā)射光的方法來解決;也可以使幾個(gè)紅外接收管并聯(lián)接收,以提高接收靈敏度。還可以將紅外發(fā)射管和紅外接收管放入黑盒屏蔽,僅在發(fā)射和接收處開個(gè)小窗口,這樣可消除雜散紅外光的干擾,使有用信號增強(qiáng)。
在系統(tǒng)聯(lián)調(diào)時(shí),常會出現(xiàn)遙控距離達(dá)不到指標(biāo),接收信號出錯(cuò)等問題。這可能是發(fā)射機(jī)末級輸出電路與天線阻抗不匹配,發(fā)射效率低所致。市面上常見的75歐拉桿天線(1米)在10MHz時(shí)呈容性,因此應(yīng)使發(fā)射機(jī)輸出阻抗呈感性,才能與天線匹配,還有一種可能是接收機(jī)靈敏度低,故應(yīng)調(diào)整接收天線與輸入回路的匹配。
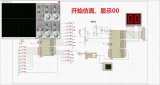
??? 紅外多路遙控發(fā)射系統(tǒng)的仿真效果見附錄III,紅外多路遙控接收系統(tǒng)仿真效果見附錄IV。
本章是對系統(tǒng)的調(diào)試和檢測,先對多路紅外遙控發(fā)射電路檢測和調(diào)試,在對接收部分檢測和調(diào)試,最后整體調(diào)試,經(jīng)過反復(fù)的調(diào)試最后達(dá)到要求。
?
?
?
設(shè)計(jì)時(shí)間為十五周,前三周主要完成了對整個(gè)系統(tǒng)的總規(guī)劃,前三周復(fù)習(xí)相關(guān)知識,查找相關(guān)資料,第四周到第六周熟悉PROTEL99的使用、熟悉通用編程器的使用、學(xué)習(xí)單片機(jī)編程方面的知識。接下來三周編寫硬件調(diào)試軟件、仿真軟件,第十周到第十二周編寫軟件、并在線調(diào)試,完成整個(gè)系統(tǒng)的設(shè)計(jì);第十三周到第十四周進(jìn)行軟硬件聯(lián)合調(diào)試,完成整個(gè)系統(tǒng)的設(shè)計(jì)。
本紅外多路遙控發(fā)射,接收系統(tǒng)是以紅外線為傳送信息媒體的短距離無線控制系統(tǒng),可對八個(gè)受控對象的工作狀態(tài)進(jìn)行遙控。此系統(tǒng)由發(fā)射和接收兩部分組成,發(fā)射部分完成遙控指令的發(fā)射,接收部分完成遙控指令的實(shí)施,設(shè)計(jì)時(shí)可將其分開設(shè)計(jì)。發(fā)射控制部分電路主要分為:
a)?? 鍵盤及其代碼產(chǎn)生電路? 產(chǎn)生表示控制信號的BCD代碼;
b)?? 編碼電路 對控制信號代碼和地址代碼進(jìn)行編碼,并轉(zhuǎn)換成串行發(fā)送數(shù)據(jù);
c)?? 顯示器 標(biāo)明受控對象及其受控狀態(tài)類別;
d)?? 調(diào)制振蕩電路? 產(chǎn)生頻率為40kHz的振蕩信號,并由發(fā)送的數(shù)據(jù)對其進(jìn)行脈沖調(diào)制,形成發(fā)射信號;
e)?? 紅外發(fā)射電路 將編碼信號調(diào)制到高頻信號上并將高頻信號進(jìn)行功率放大,使天線上獲得滿足要求的發(fā)射功率,并轉(zhuǎn)換成紅外光信號;
f)?? 紅外接收電路? 將接收到的紅外光信號轉(zhuǎn)換成電信號,并放大,解調(diào)出串行數(shù)據(jù);
g)?? 解碼電路 將接收到的串行數(shù)據(jù)轉(zhuǎn)換成控制信號;
h)?? 譯碼電路 將控制代碼譯成控制信號;
i)?? 控制電路 對受控設(shè)備進(jìn)行控制。
在電路圖設(shè)計(jì)過程中,應(yīng)盡量使電路簡單化,以方便硬件的順利進(jìn)行,本次設(shè)計(jì)用PROTEL99編程、調(diào)試與仿真。編程結(jié)束先用偉福軟件模擬器進(jìn)行調(diào)試,調(diào)試成功之后再連接硬件,進(jìn)行軟硬件聯(lián)合調(diào)試。
在本文即將結(jié)束之際,我要由衷地感謝在我畢業(yè)設(shè)計(jì)階段,乃至本科四年學(xué)習(xí)生活中幫助過我的師長與同學(xué)。
?
?
在本次設(shè)計(jì)中,我得到了老師和同學(xué)的熱心幫助和鼎力支持。他們對本設(shè)計(jì)提出了寶貴意見,并在精神上給予我大力支持,使得整個(gè)設(shè)計(jì)系統(tǒng)得以基本成型和完善。恩師的細(xì)心指導(dǎo)和同學(xué)的互助互愛為本設(shè)計(jì)的成功提供了堅(jiān)實(shí)的基礎(chǔ)和重要的保障。
本設(shè)計(jì)主要是在伍乾永老師的精心指導(dǎo)下完成的。他給予我耐心、細(xì)致的指導(dǎo),不厭其煩地為我解決設(shè)計(jì)工作中所遇到的問題。在學(xué)習(xí)、論文設(shè)計(jì)期間,伍老師給予我深深的教誨和無數(shù)的幫助,讓我終生難忘。伍老師那嚴(yán)謹(jǐn)?shù)闹螌W(xué)作風(fēng)、忘我的工作精神和以人為本的教學(xué)理念時(shí)時(shí)激勵(lì)著我,鼓舞著我。
在這段過程中遇到了很多困難,在伍老師的指導(dǎo),去圖書館查閱資料,回來和室友們認(rèn)真的探討。最終將每個(gè)問題都一一解決。特別指出在程序調(diào)試時(shí),張昌文同學(xué)給予我積極熱情的幫助,在與之交談的過程中,我思維得以拓展,最后將問題解決。
在此,我要感謝我的母校--四川理工學(xué)院,是她為我們的成長、成才提供了良好的環(huán)境!使得“厚的連理,勵(lì)志勤工”的我校校訓(xùn)融入我生生不息的血脈,菩提成我“無私奉獻(xiàn),終生學(xué)習(xí),不斷進(jìn)取”的血性。
最后,向伍乾永老師和其他任課老師以及其他幫助過我的老師致以最崇高的敬意和深深地祝福!向?qū)ξ疑斐鲈值耐瑢W(xué)表示衷心的感謝!
?
?
?
?
?
?
?
?
?
?
參考文獻(xiàn)? ??????????????????????????????????????????????????????????????????????
[1] 張德風(fēng).常愛車 一種新型學(xué)習(xí)型紅外遙控開關(guān)的設(shè)計(jì)[J]-科技信息2009,35 (5)
[2] 趙思成.郭娜 單片機(jī)紅外線遙控器輸入系統(tǒng)研究[J]-硅谷2009,43(1)
[3] 潘清明 .劉啟新 單片機(jī)控制紅外遙控器接口[J]-電子測量技術(shù)2004,40(2)
[4] 黃隴 實(shí)用型紅外遙控多功能開關(guān)的設(shè)計(jì)與實(shí)現(xiàn)[J]-無線電工程2003,33(5)
[5] 謝自美.電子線路設(shè)計(jì)實(shí)驗(yàn)測試 [M].武漢:華中科技大學(xué)出版社,2000.
[6] 陳曉文.電子線路課程設(shè)計(jì) [M].北京:電子工業(yè)出版社,2004.
[7] 馬建國.電子系統(tǒng)設(shè)計(jì) [M].北京:高等教育出版社,2004.?
[8] 丁元杰.單片微機(jī)原理及應(yīng)用 [M].北京:機(jī)械工業(yè)出版社,1994. ?
[9] ?Alan B. Marcovitz . Introduction to Logic Design ,? McGraw-Hill, 2002
[10] 張毅剛.MCS-51單片機(jī)應(yīng)用設(shè)計(jì) [M].哈爾濱:哈爾濱工業(yè)大學(xué)出版社,1997.
[11] 張毅坤.單片微機(jī)計(jì)算機(jī)原理及應(yīng)用 [M].西安:西安電子科技大學(xué)出版社,1997. ????
[12] STANLEY P. LIPSHITZ; JOHN VANDERKOOY Journal of the Audio Engineering Society.2004,52(3).-200-215 [M].美國:734B0009(刊號)
[13] . AT Attachment with Packet Interface Extension (ATA/ATAPI-5) ANSI NCITS 1998
[14]? . Maury Wright. Disk Drivers at 40 Lean . Mean Storage Machines .1996?
[15] 黃正瑾.電子設(shè)計(jì)競賽賽題解析(一)[M].南京:東南大學(xué)出版社,2002.
[16] 周航慈.單片機(jī)程序設(shè)計(jì)基礎(chǔ) [M]. 北京:北京航空航天大學(xué)出版社,2003.
[17] 李廣弟.單片機(jī)基礎(chǔ) [M].北京:北京航空航天大學(xué)出版社,1994.
[18] 楊西明.單片機(jī)編程與應(yīng)用入門? [M].北京:機(jī)械工業(yè)出版社,2004.
[19] 閻石.數(shù)字電子技術(shù)基礎(chǔ)(第五版)[M].高等教育出版社,2008.
[20] 謝自美主編.電子線路設(shè)計(jì)、實(shí)驗(yàn)、測試(第二版)[M].武漢:華中科技大學(xué)出版社,2000.
[21] 田良.綜合電子設(shè)計(jì)與實(shí)踐 [M].南京:東南大學(xué)出版社,2002.
[22] 何小艇.電子系統(tǒng)設(shè)計(jì) [M].杭州:浙江大學(xué)出版社,2001.
[23] 謝嘉奎主編電子線路(非線性部分)[M].北京:高等教育出版社,1999.
[24] 何立民.MCS—51系列單片機(jī)應(yīng)用系統(tǒng)設(shè)計(jì) [M].北京:北京航空航天大學(xué)出版社,1995.
[25]? 趙亮.單片機(jī)C語言編程與實(shí)例 [M]..北京:人民郵電出版社,2003. ?????
[26] 余家春.Protel 99 SE 電路設(shè)計(jì)實(shí)用教程 [M].北京:中國鐵道出版社,2004.
[27] 高鵬,安濤等主編.電路設(shè)計(jì)與制版protel99入門與提高[M].北京:人民郵電出版社,2000.
[28] http://www.sjzpt.edu.cn/lesson/dpj/syzdzl.htm
[29] . Jacob Millman,Pn.D.MICROELEC-TRONICS Digital and Analog Circuits and System.New York:McGraw-Hill Book Company,1979
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論