 電子發(fā)燒友App
電子發(fā)燒友App


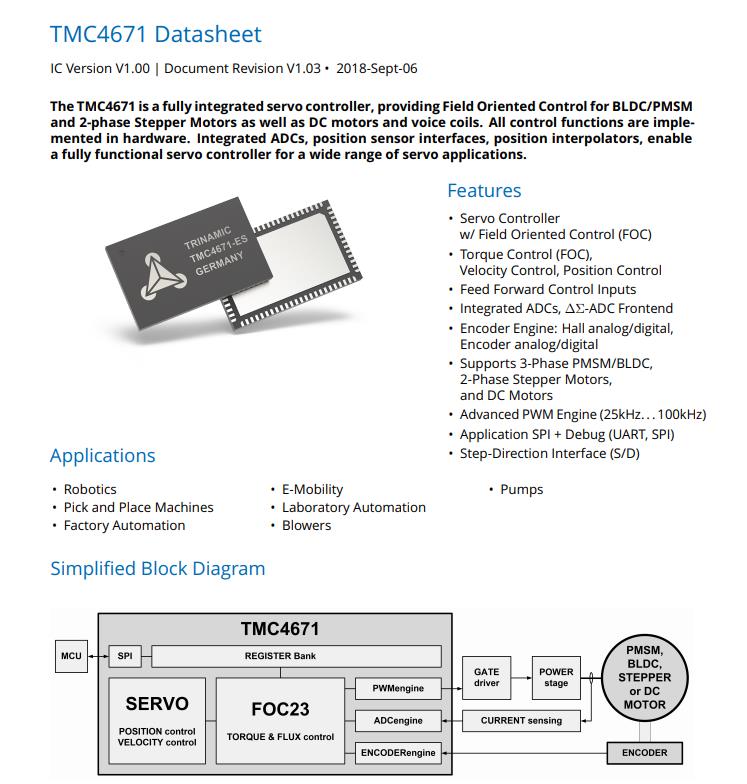
硬件FOC伺服控制芯片TMC4671適應(yīng)永磁同步伺服/直流無(wú)刷伺服/直流有刷伺服/閉環(huán)步進(jìn)/音圈電機(jī)
全球領(lǐng)先的嵌入式運(yùn)動(dòng)控制公司德國(guó)TRINAMIC MOTION CONTROL 將于近期推出其最新的伺服控制芯片TMC4671
TMC4671是一款完全集成伺服控制芯片,為直流無(wú)刷電機(jī)、永磁同步電機(jī)、2相步進(jìn)電機(jī)、直流有刷電機(jī)和音圈電機(jī)提供磁場(chǎng)定向控制。
??所有的控制功能都被集成在硬件上。集成了ADCs、位置傳感器接口、位置差值器,該款功能齊全的伺服控制器,適用于各種伺服應(yīng)用。
- TMC4671控制PMSM永磁同步伺服電機(jī)視頻:https://v.youku.com/v_show/id_XMzgwOTU0OTEwOA==.html
- TMC4671控制閉環(huán)步進(jìn)電機(jī)高速同步視頻:https://v.qq.com/x/page/f0645ei67yt.html?
- TMC4671控制MAXON直流有刷伺服電機(jī)視頻:https://v.qq.com/x/page/x0780mp7qa3.html?

功能簡(jiǎn)介:
-?伺服控制芯片、空間磁場(chǎng)矢量控制(FOC)
-?轉(zhuǎn)矩控制(FOC)、速度控制、位置控制
-?前饋控制輸入
-?集成ADCs、前端△∑ADCs
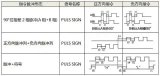
-?編碼器引擎:模擬和數(shù)字霍爾、模擬和數(shù)字編碼器
-?支持三相直流無(wú)刷伺服和永磁同步伺服電機(jī)、2相步進(jìn)伺服電機(jī)、直流有刷和音圈電機(jī)
-?先進(jìn)的PWM引擎(25KHz…100KHz)
-?應(yīng)用程序SPI+調(diào)試(UART、SPI)
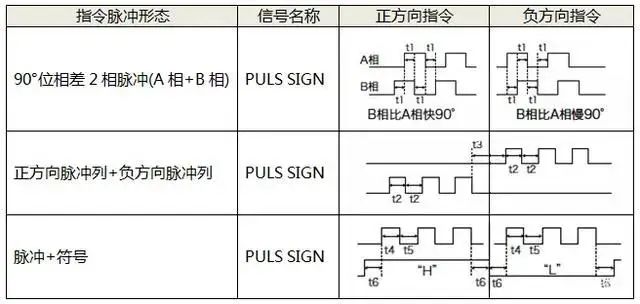
-?脈沖/方向接口

性能描述:
●帶有磁場(chǎng)矢量控制(FOC)的伺服控制芯片
- 轉(zhuǎn)矩控制模式
- 速度控制模式
- 位置控制模式
- 電流控制刷新頻率和最大的PWM頻率為100KHz (速度和位置控制的刷新頻率可以根據(jù)當(dāng)前電流刷新頻率的倍數(shù)配置)
?
●控制功能/ PI控制器
?????- 中期結(jié)果的輸入和輸出可編程斬波
?????- 以積分電路結(jié)尾保護(hù)所有控制
?????- 可編程的電壓循環(huán)向?qū)拗破?/span>
?????- 目標(biāo)值的前饋補(bǔ)償和前饋摩擦補(bǔ)償
?????- 高級(jí)前饋控制結(jié)構(gòu),實(shí)現(xiàn)最佳軌跡跟蹤性能
?????- 擴(kuò)展的中斷請(qǐng)求掩蔽選項(xiàng)和限制器狀態(tài)寄存器
?????- 具有霍爾傳感器或/和最小移動(dòng)的高級(jí)編碼器初始化算法
●運(yùn)動(dòng)控制和坡形控制
?????- 控制結(jié)構(gòu)的梯形速度斜坡
?????- 脈沖/方向接口 方便定位
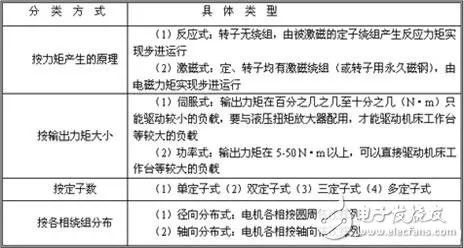
●支持的電機(jī)種類
?????- FOC3:三相永磁同步伺服電機(jī)(PMSM)
?????- FOC2:兩相步進(jìn)電機(jī)
?????- DC1:直流有刷電機(jī)或直線的音圈電機(jī)
●具有偏移校正和縮放功能的ADC引擎
?????- 集成△∑ADCs用于電流檢測(cè)電壓,電機(jī)電源電壓,模擬編碼器
??????- 集成△∑接口用于外部△∑調(diào)節(jié)
●位置反饋
?????- 開環(huán)位置發(fā)生器(可編程的PRM,RPM/S)用于初始化配置
?????- 數(shù)字增量編碼器(ABN,ABZ 高達(dá)5MHz)
- 第二路數(shù)字量編碼器輸入(雙反饋)
- 數(shù)字霍爾輸入接口帶有臨時(shí)位置插補(bǔ)功能(H1, H2, H3 resp. HU, HV , HW)
- 模擬量編碼器/模擬量霍爾輸入接口(SinCos (0?°, 90?°) or 0?°, 120?°, 240?°)
- 多圈位置計(jì)數(shù)器(32位)
- 目標(biāo)位置、速度和目標(biāo)轉(zhuǎn)矩濾波(雙階)
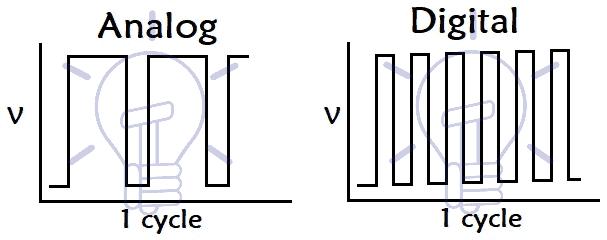
●PWM包括SVPWM
- 可編程的PWM頻率范圍從20KHz-100KHzn
- 可編程的BBM(Brake-Before-Make)時(shí)間(偏低,偏高)0 ns . . . 2.5_s在10ns步驟內(nèi)和柵極驅(qū)動(dòng)輸入信號(hào)
- PWM自動(dòng)調(diào)整,用于運(yùn)動(dòng)期間改變PWM頻率
?
●SPI通訊接口
- 40位數(shù)據(jù)長(zhǎng)度(1個(gè)ReadWrite位+7個(gè)地址位+32個(gè)數(shù)據(jù)位)
????- 立即SPI讀取響應(yīng)(通過(guò)單個(gè)數(shù)據(jù)報(bào)進(jìn)行寄存器讀取訪問(wèn))
- SPI時(shí)鐘頻率高達(dá)1 MHz(未來(lái)版本為8 MHz)
?
●TRINAMIC實(shí)時(shí)監(jiān)控接口(SPI Master)
???- 通過(guò)TRINAMIC的實(shí)時(shí)監(jiān)控系統(tǒng)實(shí)現(xiàn)實(shí)時(shí)數(shù)據(jù)高頻采樣
???- 需要PCB上的單個(gè)10針高密度連接器
???- 高級(jí)控制器通過(guò)頻率響應(yīng)識(shí)別和高級(jí)自動(dòng)調(diào)諧支持使用TRINAMIC IDE調(diào)整選項(xiàng)??
?
●UART調(diào)試接口
- 3引腳(GND, RxD, TxD)?3.3V ?UART接口(1N8; 9600 (default), 115200, 921600, or 3M bps)
- 簡(jiǎn)易寄存器訪問(wèn)并行于嵌入式用戶應(yīng)用程序接口(SPI)
?
●供電電壓:5V和3.3V;1.8V的VCC_CORE由內(nèi)部產(chǎn)生
?
●IO電壓:3.3V用于所有的數(shù)字I/O(可由VCCIO選擇提供);5V插分模擬量輸入范圍,3V為單端輸入范圍
?
●時(shí)鐘頻率:25MHz(需要外部振蕩器)
?
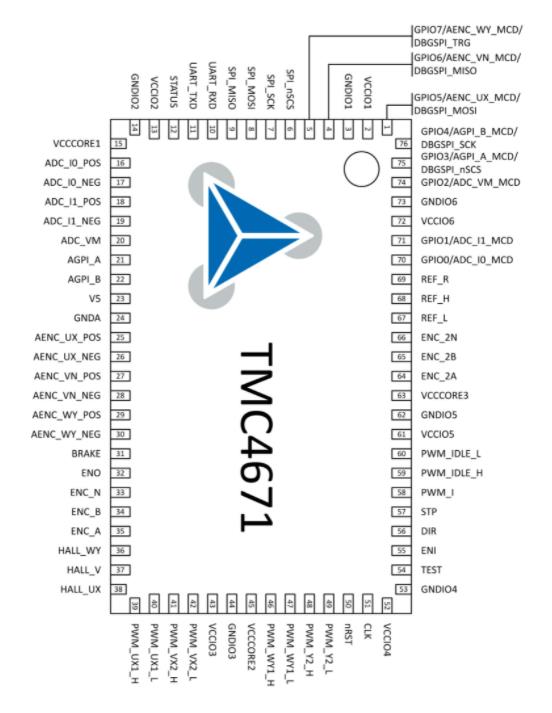
●封裝:QFN76
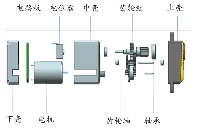
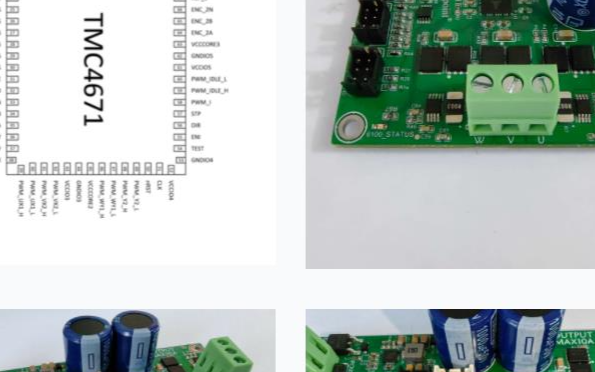
TMC4671控制步進(jìn)電機(jī),直流無(wú)刷伺服,永磁同步,音圈電機(jī)接線



關(guān)于Trinamic
Trinamic是嵌入式電機(jī)和運(yùn)動(dòng)控制領(lǐng)域的全球領(lǐng)導(dǎo)者。主要產(chǎn)品包括專用運(yùn)動(dòng)控制集成芯片,智能電機(jī)驅(qū)動(dòng)器和嵌入式微系統(tǒng)。 Trinamic的工程師擁有數(shù)十年的經(jīng)驗(yàn),擅長(zhǎng)解決現(xiàn)實(shí)問(wèn)題,致力于為3D打印,桌面制造,醫(yī)療設(shè)備,實(shí)驗(yàn)室自動(dòng)化和監(jiān)控?cái)z像頭等領(lǐng)域設(shè)計(jì)解決方案。
該公司于2004年在德國(guó)成立,目前在愛沙尼亞塔林,美國(guó)芝加哥和中國(guó)上海設(shè)有分支機(jī)構(gòu)
有關(guān)Trinamic產(chǎn)品和技術(shù)的更多信息,請(qǐng)咨詢gao@trinamic.cn?13812617052






























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論