物聯(lián)網(wǎng)開發(fā)過程中遇到的棘手問題是:如何讓設(shè)備連接上云?設(shè)備接入主要是開發(fā)者要實(shí)現(xiàn)設(shè)備與云平臺(tái)進(jìn)行連接、數(shù)據(jù)上報(bào)/透?jìng)鳌⒚羁刂频冗^程。接入云平臺(tái)的設(shè)備一般分為兩類:第一類:設(shè)備具備聯(lián)網(wǎng)能力,并且支持
2024-03-05 08:24:40 74
74 
SDK 是 3.6 版,不支持 CYPD6127 部件。
那么,我能在 Meteor Lake 平臺(tái)上使用 SDK 3.5 嗎?
SDK 3.5 - 平臺(tái)選擇有"MTL" 關(guān)鍵字 :
2024-03-04 06:32:32
請(qǐng)問一下,百度文庫(kù)資料里面,下圖所示的系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發(fā)環(huán)境嗎?與前面4GB版本的鏡像有什么區(qū)別?
2024-03-01 23:06:01
更新SDK后提示 “@ohos.application.Ability”/“@ohos.application.AbilityStage”等模塊找不到或者無相關(guān)類型聲明
問題現(xiàn)象
更新SDK后報(bào)錯(cuò)
2024-02-18 17:17:18
現(xiàn)在。直接買100開發(fā)板,別買101模組,除非你有別的愛好。
05.其他
其實(shí)目前的模組還有很多,前端時(shí)間只要注冊(cè)個(gè)人小米開發(fā)者,送一塊小米的WIFI開發(fā)板,支持小米的SDK開發(fā),就是連接到小米平臺(tái)
2024-02-07 17:56:44
的核心標(biāo)準(zhǔn)。 目前主流的掃地機(jī)器人導(dǎo)航避障技術(shù)路徑為雙目視覺、激光雷達(dá)、3D結(jié)構(gòu)光(線激光)三條,每條技術(shù)路徑都存在著各自的特點(diǎn)。 視覺方案 掃地機(jī)器人所配備的視覺避障技術(shù)通常采用雙目攝像頭,依據(jù)三角測(cè)量原理,通
2024-02-01 16:01:00210 設(shè)置ROS環(huán)境變量是使用ROS的重要步驟之一。本文將詳細(xì)介紹如何設(shè)置ROS環(huán)境變量,包括什么是環(huán)境變量、為什么要設(shè)置ROS環(huán)境變量、如何設(shè)置ROS環(huán)境變量等。 什么是環(huán)境變量 環(huán)境變量是一種操作系統(tǒng)
2023-12-28 13:52:42295 挑戰(zhàn),包括激光雷達(dá)、單目測(cè)距和雙目視覺技術(shù)等。在當(dāng)前的高級(jí)輔助駕駛技術(shù)(ADAS)中,雙目視覺技術(shù)在距離檢測(cè)方面表現(xiàn)出色,它可以精確地測(cè)量物體的距離,提供更客觀的數(shù)據(jù)。
為了應(yīng)對(duì)這一需求,設(shè)計(jì)了一種
2023-12-19 18:02:07
雙目測(cè)寬儀是基于機(jī)器視覺原理及模擬人的雙眼進(jìn)行寬度尺寸自動(dòng)測(cè)量的儀器,是一種高度自動(dòng)化的工業(yè)實(shí)時(shí)在線寬度檢測(cè)儀表。
雙目測(cè)寬儀是一種智能化的全自動(dòng)工業(yè)在線實(shí)時(shí)寬度檢測(cè)設(shè)備,兩個(gè)工業(yè)相機(jī)就像人的雙眼
2023-12-04 17:10:35
1.添加ROS軟件源 將下面這條命令復(fù)制到ubuntu的終端執(zhí)行 sudo sh -c '. /etc/lsb-release echo "deb http
2023-12-01 16:14:26317 
安裝ROS2功能包 接下來,還有一個(gè)很重要的配置,那就是安裝ROS2功能包,我們說TogetherROS是基于ROS2深度優(yōu)化的,很多模塊還是會(huì)復(fù)用ROS2中的功能,所有ROS2的原生功能也可以支持
2023-12-01 16:02:24326 
特定硬件加速器優(yōu)化的數(shù)據(jù)格式進(jìn)行工作。經(jīng)過適配的類型用于處理圖形,以消除 CPU 和內(nèi)存加速器之間的內(nèi)存拷貝。 通過 類型協(xié)商 ,處理圖中的不同 ROS 節(jié)點(diǎn)可以公布其支持的類型,ROS 框架也可以選擇
2023-11-30 19:35:01254 
庫(kù)的支持,ROS系統(tǒng)提供豐富且功能強(qiáng)大的機(jī)器人算法庫(kù),如坐標(biāo)變換、運(yùn)動(dòng)控制等。機(jī)器人開發(fā)者可根據(jù)開發(fā)需要,簡(jiǎn)單快捷地調(diào)用合適的算法庫(kù),以提高開發(fā)效率,加快開發(fā)進(jìn)程。
(2) 開源免費(fèi),架構(gòu)精簡(jiǎn)ROS系統(tǒng)
2023-11-30 16:01:01
雙目測(cè)寬儀是機(jī)器視覺原來制造而成的智能寬度檢測(cè)設(shè)備,廣泛應(yīng)用于板材類產(chǎn)品的寬度檢測(cè)。通過測(cè)寬儀的使用,實(shí)時(shí)了解產(chǎn)品寬度品質(zhì),進(jìn)行超差提示,減少?gòu)U品的生產(chǎn)。
雙目測(cè)寬儀優(yōu)勢(shì)
測(cè)量軟件界面顯示:產(chǎn)品規(guī)格
2023-11-28 17:13:06
如果你是一個(gè)ROS2的開發(fā)者,可能對(duì)剛才我們使用的ROS2命令比較熟悉,這時(shí)你可能也會(huì)產(chǎn)生一個(gè)問題:我們之前也安裝了ROS2系統(tǒng),那ROS2的原生功能還可以正常運(yùn)行么? 我們?cè)賮碓囈辉?b class="flag-6" style="color: red">ROS2中自帶
2023-11-28 16:29:18327 
ros1: talker 注冊(cè) listener 注冊(cè) ROS Master 進(jìn)行信息匹配 listener 發(fā)送鏈接請(qǐng)求 talker 確認(rèn)請(qǐng)求 建立連接 talker 給 listener
2023-11-27 11:26:02266 
基本概念: ROS是一個(gè)用于在不同進(jìn)程間匿名的發(fā)布、訂閱、傳遞信息的中間件。 ROS2系統(tǒng)的核心部分是ROS網(wǎng)絡(luò)(ROS Graph)。 ROS網(wǎng)絡(luò)是指在ROS系統(tǒng)中不同的節(jié)點(diǎn)間相互通信的連接
2023-11-27 11:21:15782 配置ROS驅(qū)動(dòng)功能包 將WHEELTEC 100N的 ROS_SDK 保存在工作空間的src文件夾下。 通過 catkin_make 進(jìn)行編譯。 剛裝的ros環(huán)境會(huì)報(bào)錯(cuò),如下: Make Error
2023-11-22 18:13:34512 
TF命令行操作 ROS中的TF該如何使用呢?我們先通過兩只小海龜?shù)氖纠私庀禄谧鴺?biāo)系的一種機(jī)器人跟隨算法。 小海龜跟隨例程 這個(gè)示例需要我們先安裝相應(yīng)的功能包,然后就可以通過一個(gè)launch文件
2023-11-22 17:24:14240 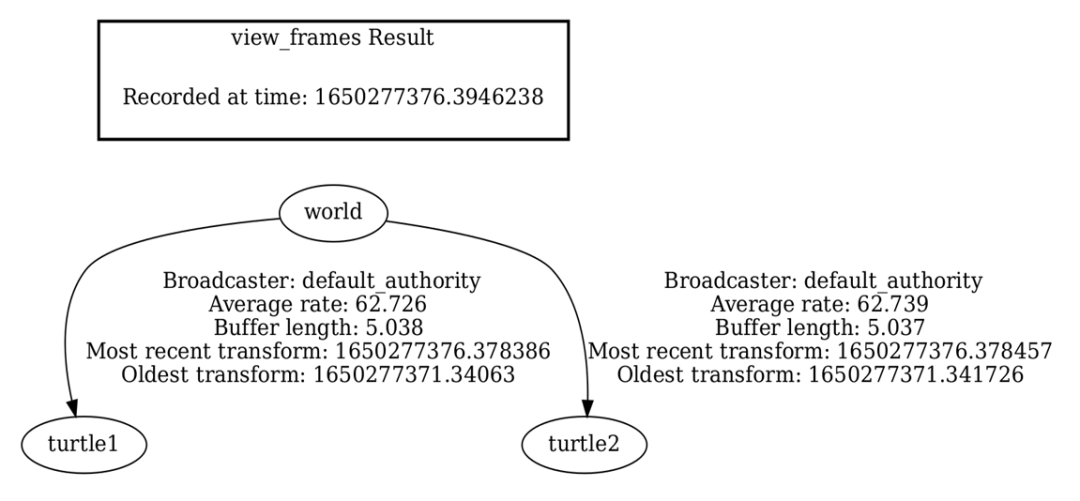
ROS的擴(kuò)展 ROS除了本身框架性的東西以外,最大的特色就是能融合很多其他的東西,形成一個(gè)機(jī)器人開發(fā)生態(tài)圈,難怪ROS名為機(jī)器人操作系統(tǒng),使命是powering the world‘s robots
2023-11-21 18:12:20321 ROS核心框架 對(duì)于第一個(gè)問題,我也沒仔細(xì)研究過源碼,核心代碼基本由python和C++組成,運(yùn)用了xmlrpc機(jī)制,每個(gè)運(yùn)行的節(jié)點(diǎn)可以理解成一個(gè)進(jìn)程。進(jìn)程間通訊有些是共享內(nèi)存的方式(比如
2023-11-21 18:07:24388 
相機(jī)就像人的雙眼,可以形成立體視覺,這樣就可以得到足夠的信息判斷被測(cè)物的距離,修正和消除距離變化對(duì)測(cè)量的影響。
雙目測(cè)寬儀是新研發(fā)的一種寬度檢測(cè)設(shè)備,采用立體機(jī)器視覺原理檢測(cè),利用算法消除傾斜等
2023-11-20 17:25:38
連接到主機(jī)處理器。各項(xiàng)功能由相應(yīng)的SDK 支持,該模組已適配OPEN CV 開發(fā)環(huán)境,并有各個(gè)攝像頭之間內(nèi)外參完整標(biāo)定數(shù)據(jù)源,用戶可以輕松地利用OPEN CV 開
2023-11-17 17:55:38
對(duì)于ROS而言,其最常用的就是Topic話題以及Service兩個(gè)了。之前我們?cè)诹私釻nity Robotics Hub時(shí)候就了解到基本的Unity和ROS的通訊,下面我們來詳細(xì)介紹一下Unity
2023-11-17 17:22:25279 
Simulink對(duì)機(jī)器人操作系統(tǒng)(ROS)的支持使我們能夠創(chuàng)建與ROS網(wǎng)絡(luò)一起工作的Simulink模型。ROS是一個(gè)通信層,允許機(jī)器人系統(tǒng)的不同組件以消息的形式交換信息。 組件通過將消息發(fā)布到特定
2023-11-15 17:26:46224 
前言:一直都覺得ROS很神秘,到底是個(gè)操作系統(tǒng),僅憑稱呼就讓我望而卻步了。但ROS和自動(dòng)駕駛仿真有著千絲萬縷的聯(lián)系,作為仿真軟件和智駕算法的數(shù)據(jù)橋梁,ROS是個(gè)繞不開的話題,所以還是得硬著頭皮啃一啃。然后用大白話講給你聽,最好再做兩個(gè)小栗子,那可真是功德無量了。
2023-11-15 12:42:031511 
OneNET的NB模組用AT指令怎么連上ONENET平臺(tái)?
2023-11-01 06:05:16
現(xiàn)在市面上最常見的還是USB攝像頭,物美價(jià)廉,要想使USB攝像頭在ROS下正常工作,我們就需要一個(gè)軟件包來支持,現(xiàn)在ROS下最常用的usb攝像頭軟件包就是usb_cam了,簡(jiǎn)單理解該軟件包就是V4L(Video for Linux)USB攝像頭驅(qū)動(dòng)在ROS在的一個(gè)移植版本。
2023-10-29 11:26:29313 
paddle_inference_ros_demo功能包是基于paddle_inference_ros開發(fā)的,幫助開發(fā)者快速體驗(yàn)paddle_inference在ROS環(huán)境下的推理部署效果的功能包。可以直接進(jìn)入該項(xiàng)目鏈接進(jìn)行查看和快速體驗(yàn)。
2023-10-20 17:02:07265 
【KV260視覺入門套件試用體驗(yàn)】四、KV260 視覺入門套件和固件更新
一、KV260 視覺 AI 入門套件
Xilinx? Kria? KV260 視覺 AI 入門套件由K26 系統(tǒng)級(jí)模塊
2023-10-17 08:28:19
使用FPGA的靈活性,提供了多種的AI開發(fā)固件,可以讓開發(fā)者測(cè)試使用FPGA支持的多媒體能力,并且開發(fā)板提供了基于FPGA的開發(fā)SDK,使得在該開發(fā)平臺(tái)上快速開發(fā)AI應(yīng)用。 ReID行人重識(shí)別(Person
2023-10-09 01:32:12
目前在使用ros2的humble版本,但使用中感受到的編譯速度慢,node啟動(dòng)速度慢等體會(huì)是比較影響ROS2的普及速度的,KV260因?yàn)閮?nèi)部存在FPGA模塊,可以實(shí)現(xiàn)硬件加速(accelerated
2023-10-08 23:42:52
Choose Task:[請(qǐng)輸入括號(hào)內(nèi)的數(shù)字]
---眾多工具,等君來用---
ROS相關(guān):
[1]:一鍵安裝(推薦):ROS(支持ROS/ROS
2023-10-04 23:35:18
SDK 是一種構(gòu)建在開源且被廣泛采用的 GStreamer 框架上的應(yīng)用框架。這種SDK 設(shè)計(jì)上支持跨
所有賽靈思平臺(tái)的無縫開發(fā),包括賽靈思 FPGA、SoC、Alveo 卡,當(dāng)然還有 Kria
2023-09-26 15:17:29
的 API,而不需要下載多個(gè) SDK。對(duì)于某些設(shè)備不支持的 API 的情況,開發(fā)者可通過 canIUse() 函數(shù)判斷。
隨著時(shí)間的推移,鴻蒙系統(tǒng)會(huì)發(fā)布新的版本,每個(gè)版本都會(huì)有配套的 API 更新
2023-09-19 15:45:38
什么是ST MC SDK5.x?ST MC SDK5.x支持的MCU及硬件評(píng)價(jià)板?ST MC SDK5.x固件介紹?ST MC SDK5.2圖形化人機(jī)界面 MotorControl WorkBench?ST MC SDK5.x 電動(dòng)機(jī)參數(shù)測(cè)試?ST MC SDK5.x 參考資料列表
2023-09-18 11:08:49 1
1 的提取算法,后端是局部地圖的維護(hù)、閉環(huán)矯正與全局地圖的更新。在 TUM 數(shù)據(jù)集測(cè)試中,其最高精度可達(dá) 1cm。我司基于該框架研發(fā)算法,實(shí)現(xiàn)雙目視覺與 IMU 數(shù)據(jù)的融合,精準(zhǔn)計(jì)算位移距離并給出可靠的實(shí)時(shí)
2023-09-18 10:12:49440 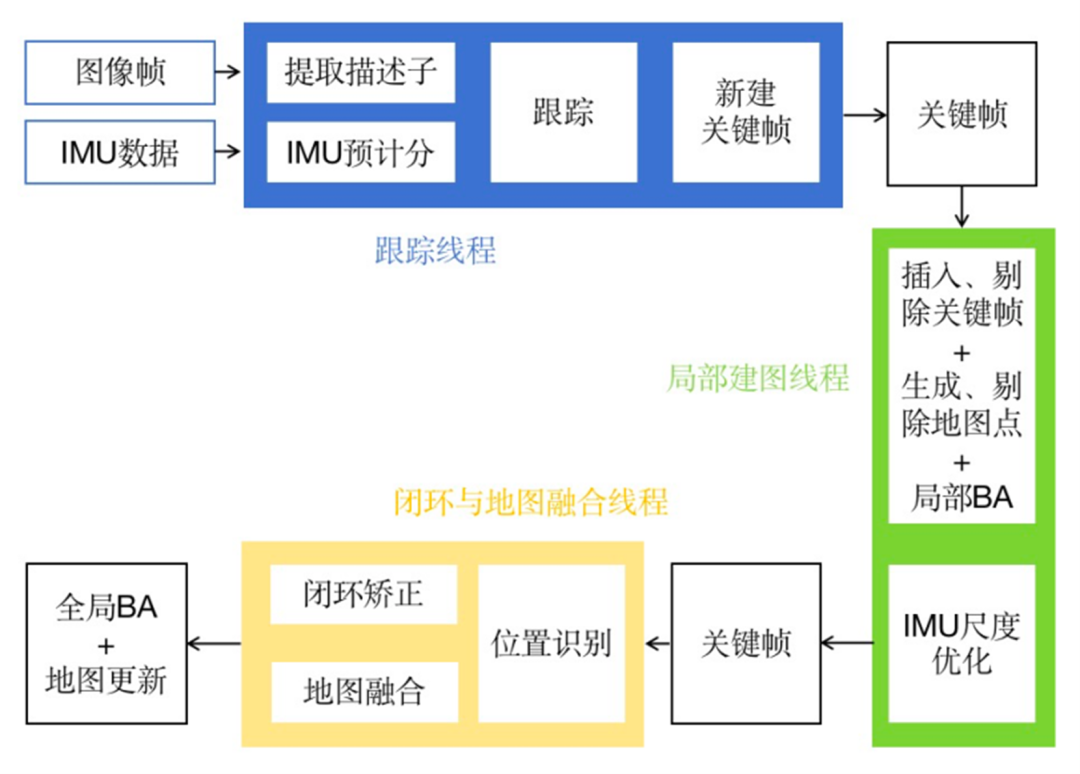
有rolling,目前也可以看到一些博文使用的是rolling版本的ros2
b.KRS想著的包比較多,很多包也還在不斷更新中,甚至可能開發(fā)板推出時(shí)某些包的開發(fā)還未完成
c.KRS涉及ROS2 嵌入式
2023-09-17 00:13:54
理解了序列化,再回到ROS。我們發(fā)現(xiàn),ROS沒有采用第三方的序列化工具,而是選擇自己實(shí)現(xiàn),代碼在roscpp_core項(xiàng)目下的roscpp_serialization中,見下圖。這個(gè)功能涉及的代碼
2023-09-14 17:26:28557 獲取SDK
SDK 使用 Repo 工具管理,拉取 SDK 需要配置安裝 Repo 工具。
Repo is a tool built on top of Git. Repo helps
2023-09-11 09:51:39
(libraries)和約定(conventions)的集合,旨在簡(jiǎn)化在各種機(jī)器人平臺(tái)上創(chuàng)建復(fù)雜而健壯的機(jī)器人行為的任務(wù)。
ROS2 humble 是最新的 LTS 版本,官方發(fā)布在 Ubuntu 22.04 上,目前
2023-09-04 03:33:42
我將RTT studio升級(jí)到了2.2.7,SDK的版本是1.2.0,使能C++后編譯會(huì)報(bào)出以下錯(cuò)誤:
在RTT studio的2.2.6中則沒有該問題,請(qǐng)幫忙解決下,謝謝。另外RTT studio的SDK中能否包含ROS或ROS2的功能?
2023-09-01 11:23:03
雙目立體視覺一直是機(jī)器視覺研究領(lǐng)域的發(fā)展熱點(diǎn)和難點(diǎn),“熱”是因?yàn)?b class="flag-6" style="color: red">雙目立體視覺有著及其廣闊的應(yīng)用前景,且隨著光學(xué)、計(jì)算機(jī)科學(xué)等學(xué)科的不斷發(fā)展
2023-08-25 17:28:331273 
雙目更多的是基于物理測(cè)量,而單目視覺則是基于邏輯推理,通過大量的數(shù)據(jù)訓(xùn)練,先識(shí)別出目標(biāo),再根據(jù)目標(biāo)的大小和高度估算距離。因此,單目視覺的漏檢率高于雙目立體視覺,因?yàn)榭陀^上存在corner case。
2023-08-17 09:40:062165 
機(jī)器視覺也稱為計(jì)算機(jī)視覺,包括單目視覺、雙目(立體)視覺和多目視覺研究用計(jì)算機(jī)來模擬生物外部顯示器或宏觀視覺功能的科學(xué)和技術(shù)首要目標(biāo)是用圖像創(chuàng)建或恢復(fù)現(xiàn)實(shí)視覺模型,然后認(rèn)知現(xiàn)實(shí)世界。機(jī)器視覺
2023-08-14 09:51:35615 
機(jī)器視覺也稱為計(jì)算機(jī)視覺,包括單目視覺、雙目(立體)視覺和多目視覺研究用計(jì)算機(jī)來模擬生物外部顯示器或宏觀視覺功能的科學(xué)和技術(shù)首要目標(biāo)是用圖像創(chuàng)建或恢復(fù)現(xiàn)實(shí)視覺模型,然后認(rèn)知現(xiàn)實(shí)世界。
2023-08-11 09:34:00376 固件更新支持是PSA設(shè)備的基本屬性。然而,在不同的嵌入式平臺(tái)上更新設(shè)備固件的機(jī)制有很大的不同。這由于安全處理環(huán)境(SPE)的不同實(shí)現(xiàn)而進(jìn)一步復(fù)雜化,安全處理環(huán)境(SPE)具有獨(dú)立于應(yīng)用固件的其自己
2023-08-09 06:22:52
獲取SDK
SDK 使用 Repo 工具管理,拉取 SDK 需要配置安裝 Repo 工具。
Repo is a tool built on top of Git. Repo helps
2023-08-02 09:24:54
、圖像預(yù)處理和特征提取、立體匹配以及三維重建。為解決智能移動(dòng)機(jī)器人、工業(yè)裝配機(jī)器人、家用機(jī)器人、公共服務(wù)機(jī)器人的視覺問題,雙目立體視覺技術(shù)的進(jìn)一步研究可對(duì)多目視覺具有重要的啟發(fā)。 本文對(duì)雙目立體視覺測(cè)深
2023-07-19 14:18:240 本文對(duì)ToF、雙目視覺、結(jié)構(gòu)光這三種技術(shù)展開分析,幫助你了解其各自的特點(diǎn)及應(yīng)用
2023-07-10 16:04:16903 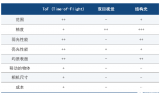
功耗低、性能好、聯(lián)網(wǎng)快——基于移芯EC618平臺(tái)的合宙低功耗4G-Cat.1系列模組,支持標(biāo)準(zhǔn)AT/LuatOS/C-SDK多樣化開發(fā)方式,可滿足用戶不同開發(fā)需求。其中C-SDK倉(cāng)庫(kù)提供給客戶自己
2023-07-08 10:04:221077 
功耗低、性能好、聯(lián)網(wǎng)快——基于移芯EC618平臺(tái)的 合宙低功耗4G-Cat.1系列模組 ,支持標(biāo)準(zhǔn)AT/ LuatOS/ C-SDK多樣化開發(fā)方式,可滿足用戶不同開發(fā)需求。 其中 C-SDK倉(cāng)庫(kù)
2023-07-07 12:05:02545 
matching)復(fù)雜,對(duì)計(jì)算資源消耗很大。那我們介紹下幾種經(jīng)典的雙目匹配的算法。 【雙目匹配】 雙目立體視覺理論建立在對(duì)人類視覺系統(tǒng)研究的基礎(chǔ)上,通過雙目立體圖象的處理,獲取場(chǎng)景的三維信息,其結(jié)果表現(xiàn)為深度圖,再經(jīng)過進(jìn)一步處理就可得到三維空間中的景物,實(shí)現(xiàn)二維圖象到
2023-07-04 11:33:511524 
首先,課程介紹了雙目相機(jī)標(biāo)定的基礎(chǔ)知識(shí)。我了解到雙目相機(jī)是由兩個(gè)相機(jī)組成的系統(tǒng),通過同時(shí)拍攝目標(biāo)物體的兩個(gè)視角來獲取三維信息。
2023-07-03 14:25:061915 
雙目立體視覺中常用的基于區(qū)域的局部匹配準(zhǔn)則主要有圖像序列中對(duì)應(yīng)像素差的絕對(duì)值之和SAD(sum of absolute differences)、對(duì)應(yīng)像素差的平方之和SSD(sum of squared differences)及半全局匹配算法SGM(semi—global matching)。
2023-07-01 09:34:021117 
一、概述先楫半導(dǎo)體的hpm_sdk,對(duì)于習(xí)慣用keil的開發(fā)者可能不太習(xí)慣,但是從開發(fā)角度上看,是比較靈活的,可以給開發(fā)者一定的發(fā)揮空間。該sdk支持cmake構(gòu)建,可以在多個(gè)支持cmake的平臺(tái)
2023-06-30 10:01:491777 
機(jī)器視覺檢測(cè)平臺(tái) 系統(tǒng)包含工業(yè)級(jí)智能機(jī)械手、機(jī)器視覺邊緣處理終端、機(jī)器視覺感知單元、機(jī)器視覺顯示單元、機(jī)器視覺場(chǎng)景應(yīng)用資源包等部分組成,可模擬人工智能典型應(yīng)用場(chǎng)景,實(shí)現(xiàn)人工智能應(yīng)用技術(shù)教學(xué)落地。系統(tǒng)支持
2023-06-29 11:39:42440 6年磨劍造就INDEMIND硬實(shí)力
2023-06-28 10:33:29249 
SGBM(Semi-Global Block Matching)是一種用于計(jì)算雙目視覺中視差(disparity)的半全局匹配算法,在OpenCV中的實(shí)現(xiàn)為semi-global block matching(SGBM)。
2023-06-28 09:29:271290 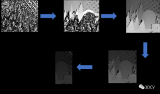
視差(Disparity):視差是指同一物體在兩個(gè)圖像中投影點(diǎn)之間的水平距離,它與物體到相機(jī)的距離成反比,因此可以用來估計(jì)物體的深度。視差圖(Disparity Map)是指存儲(chǔ)立體校正后單視圖所有像素視差值的二維圖像。
2023-06-19 10:14:14956 
“小眼睛半導(dǎo)體”出品的 Double_OV5640 雙目攝像頭模組使用;
注 2:注意攝像頭方向,插反或錯(cuò)位可能會(huì)損壞攝像頭或開發(fā)板;
注 3:輸出視頻格式為 720P@30,有部分屏幕是不支持。
步驟
2023-06-13 16:01:09
電子發(fā)燒友網(wǎng)站提供《英特爾計(jì)算機(jī)視覺SDK WindowsTASS PVL網(wǎng)絡(luò)攝像頭安全系統(tǒng).zip》資料免費(fèi)下載
2023-06-13 15:43:070 雙目視覺傳感器有效彌補(bǔ)了數(shù)據(jù)驅(qū)動(dòng)的 AI 算法在泛化性能上的短板,深度學(xué)習(xí)模型與視差點(diǎn)云技術(shù)的結(jié)合,極大擴(kuò)張了視覺傳感器的工作邊界。
2023-06-07 14:16:32217 
雙目標(biāo)定的方法有很多,常用的是基于棋盤格圖案的張氏標(biāo)定法,它利用多幅不同角度拍攝的棋盤格圖像,通過提取角點(diǎn)坐標(biāo)和求解最小二乘問題,得到兩個(gè)相機(jī)的內(nèi)參矩陣和外參矩陣,進(jìn)而計(jì)算出基礎(chǔ)矩陣。
2023-06-06 14:35:25658 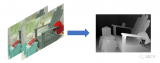
輸入數(shù)據(jù)來源可以是單目視覺相機(jī)、雙目視覺相機(jī),數(shù)據(jù)可以是灰度圖或者彩色圖。
基于單目圖片的稱為單目車道線檢測(cè)技術(shù),基于雙目圖片的稱為雙目車道線檢測(cè)技術(shù)。
2023-06-01 14:18:320 近些年迅猛發(fā)展的3D視覺技術(shù)已成為AGV領(lǐng)域的關(guān)鍵技術(shù)之一,進(jìn)一步提升AGV智能化水平的同時(shí),也實(shí)現(xiàn)了更高效、準(zhǔn)確和安全的物流操作。在戶外環(huán)境中,用于AGV托盤或貨物識(shí)別最常見的兩種3D視覺技術(shù)分別是主動(dòng)雙目視覺技術(shù)和ToF(Time-of-Flight)感知技術(shù)
2023-05-31 15:52:52886 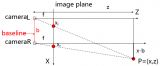
我需要 S32K312 SDK,但看到只有實(shí)時(shí)驅(qū)動(dòng)程序支持。
我需要知道如何獲得基本的 SDK。你有什么建議或重定向嗎?
2023-05-30 14:06:18
Ros小車多功能QT上位機(jī) 代碼倉(cāng)庫(kù): 小車嵌入式控制可以查看我的博客: 小車通訊協(xié)議可以參
2023-05-29 15:00:341 SDK更新為V1.1.0無法編譯,提示找不到board.c
把文件夾從hpm_sdk-main改為hpm_sdk后依然無法編譯,請(qǐng)問這種情況如何解決
2023-05-26 06:19:04
我們已經(jīng)通過 I2C 將 SE051C2 安全芯片連接到 MK81,我們從 nxp 站點(diǎn)獲得了一些針對(duì)不同 MCU 的 SDK 示例。但是我們無法找到 MK81 支持的 SE05x 示例。
我們需要
2023-05-22 07:07:41
ROS是機(jī)器人操作系統(tǒng)(Robot Operating System)的英文縮寫。ROS是用于編寫機(jī)器人軟件程序的一種具有高度靈活性的軟件架構(gòu)。ROS的原型源自斯坦福大學(xué)的STanford
2023-05-19 17:45:072797 
ROS的通信架構(gòu)是ROS的靈魂所在,它包括數(shù)據(jù)處理,進(jìn)程運(yùn)行,消息傳遞等** 。這篇文章主要介紹ROS1的通信架構(gòu)的基礎(chǔ)通信方式和相關(guān)概念,因?yàn)?b class="flag-6" style="color: red">ROS1和ROS2的通信方式相差很大,文章后面會(huì)介紹ROS2 的通信框架和差異。
2023-05-19 17:23:062693 
ROS的概念分為三個(gè)層次:文件系統(tǒng)層、計(jì)算圖層、社區(qū)層,這些層次以及概念將會(huì)在接下來的章節(jié)介紹。
除了這三個(gè)層次的概念,ROS同樣定義兩個(gè)names類型,包資源名稱和圖形資源名稱。
2023-05-19 17:11:591119 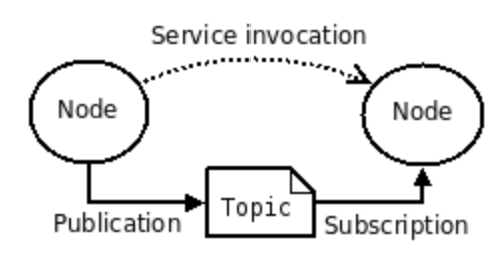
近來找到的實(shí)習(xí)主要是做智能車控制,用到的也就是ROS機(jī)器人操作系統(tǒng),ROS需要運(yùn)行在一個(gè)操作系統(tǒng)上,這個(gè)操作系統(tǒng)常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS組合就是實(shí)習(xí)的主要學(xué)習(xí)內(nèi)容了。所以我就新開了一個(gè)坑,網(wǎng)絡(luò)上ROS的資源很豐富,我在此只是用以分享學(xué)習(xí)筆記。
2023-05-19 17:07:413736 
的micro-ROS解決方案 。micro-ROS是一個(gè)使用ROS 2的機(jī)器人控制系統(tǒng)的開源項(xiàng)目,ROS 2是第二代ROS(機(jī)器人操作系統(tǒng)),用于微控制器上的各種機(jī)器人系統(tǒng)。 在本篇文章中,您將了解用于微型ROS實(shí)現(xiàn)工業(yè)機(jī)器手的最佳硬件和軟件平臺(tái),這些平臺(tái)可以使用
2023-05-18 23:15:02504 RK3568 :已具備產(chǎn)品化的完成OpenHarmony移植適配的模組。
主要能力:
基于Rockchip RK3568平臺(tái),集成雙核架構(gòu)GPU以及高效能NPU,四核64位Cortex-A55
2023-05-16 14:56:42
剛剛為 JN5188 創(chuàng)建并下載了 SDK。當(dāng)我創(chuàng)建一個(gè)項(xiàng)目并嘗試訪問外圍設(shè)備工具時(shí),它顯示為已禁用并顯示“該工具不支持所選處理器”。處理器在配置硬件信息中顯示為 JN5188,核心為
2023-05-12 08:19:42
T507:已具體產(chǎn)品化的完成OpenHarmony移植適配的模組。
主要能力:
全志工業(yè)級(jí)T507芯片,該芯片集成四核CortexTM – A53 CPU、G31 MP2 GPU、多路視頻輸出接口
2023-05-11 16:34:42
你好。我正在為 SJA1110 SDK 使用 S32DS 3.4。
我在“可用的 S32DS 軟件站點(diǎn)”中添加 SDK .zip 文件,用于“首選項(xiàng) -> S32 平臺(tái)的 S32
2023-05-10 07:17:58
芯片燒錄行業(yè)領(lǐng)導(dǎo)者-昂科技術(shù)近日發(fā)布最新的燒錄軟件更新及新增支持的芯片型號(hào)列表,其中昂科發(fā)布軟件更新支持Espressif樂鑫科技的低功耗藍(lán)牙模組ESP32-WROOM32E已經(jīng)被昂科的通用燒錄平臺(tái)
2023-05-09 17:17:102151 
團(tuán)隊(duì)去年與 Open Robotics 一起,在提供硬件加速器的計(jì)算平臺(tái)上加入了適應(yīng)和類型協(xié)商以提高 ROS 的性能。他們還實(shí)現(xiàn)了用于 Isaac ROS 的適應(yīng)和類型協(xié)商—— NITROS(NVIDIA Isaac Transport for ROS)。
2023-05-06 10:01:17323 
Blynk 最近推出了一個(gè)新的物聯(lián)網(wǎng)平臺(tái),對(duì) ESP8266 提供開箱即用的支持,具有許多很酷的功能,包括設(shè)備配置和管理、云中的數(shù)據(jù)托管、固件無線更新、用戶和組織管理、數(shù)據(jù)分析、各種自動(dòng)化等等。
2023-04-28 06:15:54
雙目測(cè)距的原理就說到這里,為了避免大家看到大段純敘述性的文字頭暈,下面的行文將會(huì)以FAQ的形式圍繞著實(shí)現(xiàn)雙攝像頭測(cè)距過程中碰到的幾點(diǎn)疑惑展開。
2023-04-26 16:47:373393 
ESP8266 Software Development Kit(SDK)是樂鑫為開發(fā)者提供的物聯(lián)網(wǎng)應(yīng)用開發(fā)平臺(tái),包括基礎(chǔ)平臺(tái)以及上層應(yīng)用開發(fā)示例,如智能燈、智能開關(guān)等。SDK 的基礎(chǔ)平臺(tái)按照是否基于操作系統(tǒng)可分為:non-OS 和 RTOS 兩種版本。
2023-04-25 15:12:101156 
一、實(shí)驗(yàn)?zāi)康腄ouble_OV5640 雙目攝像頭模組采集視頻,通過 HDMI 輸出到外部顯示器。二、實(shí)驗(yàn)設(shè)計(jì)OV5640 寄存器配置FPGA 通過 I2C 接口配置 OV5640,在實(shí)驗(yàn)例程中已將
2023-04-18 16:45:09
變化(PTP-wise)。是否有更新的應(yīng)用說明討論 SDK 如何支持 PTP?我找到了 driver_examples\\enet\\txrx_ptp1588_transfer\\enet_txrx_ptp1588_transfer.c(以及其中的 readme.txt),但想知道是否還有其他我可以閱讀的內(nèi)容?
2023-04-18 08:46:34
使用 MCUXpresso“托管”項(xiàng)目與導(dǎo)入“演示”項(xiàng)目時(shí)項(xiàng)目設(shè)置/組織不同。這讓我想知道演示是否是在不同的環(huán)境中創(chuàng)建的。但更重要的是,與通過 2.13.0 版本的 SDK 提供的文件相比,該演示似乎具有更新
2023-04-04 07:24:56
KIT EVAL SERDESUB-913ROS
2023-03-30 11:45:55
我無法安裝任何 SDK。我收到“無法加載 SDK 更新站點(diǎn)或未設(shè)置 SDK 更新站點(diǎn)”。防火墻已被禁用。我已經(jīng)安裝了 v11.6.0。
2023-03-27 06:49:05
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論