 電子發燒友App
電子發燒友App


2018-10-26 14:48:05 來源:麥姆斯咨詢 評論: 點擊:
據麥姆斯咨詢介紹,隨著3D傳感模組價格的下降和性能的提升,3D視覺或深度傳感正不斷賦能各種新應用,包括幫助機器人創建環境地圖并完成任務,比方如何最好地避讓人類。其他應用還包括物體取放、組合裝配和檢測,以及將物品從一個位置移動到另一個位置等。
據麥姆斯咨詢介紹,隨著3D傳感模組價格的下降和性能的提升,3D視覺或深度傳感正不斷賦能各種新應用,包括幫助機器人創建環境地圖并完成任務,比方如何最好地避讓人類。其他應用還包括物體取放、組合裝配和檢測,以及將物品從一個位置移動到另一個位置等。
這些應用都依賴于經濟且強大的3D視覺傳感器,目前,該領域存在多種競爭型技術。所有這些技術都有各自的優點和缺點,具有不同的工作距離、分辨率、處理能力以及成本。每種技術都有其重要的市場價值,大體因為目前還沒有能夠應對所有應用場景的單一最佳解決方案。
3D成像在自動駕駛汽車的環境感知方面發揮著關鍵作用
“根據各種應用所需要的性能和市場限制,這些技術都可以找到各自的用武之地,” Yole光電子技術和市場分析師Alexis Debray說道。
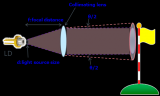
對于3D視覺,競爭技術包括許多種類的激光雷達(LiDAR)和飛行時間(time-of-flight,ToF)傳感器,它們發出光線并通過測量返回信號所需要的時間來獲得距離信息。還有結構光技術,該方案通過測量投射到物體上的光圖案的變形來確定距離(也是三角測距法)。另一種技術是激光三角測量,通過激光點出現在相機視場中的位置提取深度。最后,還有一種技術方案是立體深度視覺傳感,通過使用兩個相機圖像特征點的差異來計算距離。
除立體深度視覺外,上述方法都需要某種形式的照明。這在某些照明不定的工業環境中可能是優勢,但照明確實增加了功耗,如果是電池供電型設備就可能會帶來供電問題。
供電與照明
現在,這幾種3D傳感技術在功率和尺寸方面都有了顯著的改善。“例如,結構光深度傳感,2009年時的功耗約為10W,模組大概有一塊磚頭那么大,而現在,尺寸僅為拇指指甲大小的飛行時間模組,功耗僅需250mW,”飛行時間傳感器制造商pmd technologies(以下簡稱pmd)銷售和業務開發副總裁Mitch Reifel介紹說。
3D視覺或深度成像解決方案的發展演變。上圖是三種性能大致相當的解決方案,使用了兩種不同的技術方案(結構光和飛行時間)。十年來,尺寸都大約縮小了十倍。
受益于這些技術的進步,新應用才能層出不窮,例如大型倉庫中移動排架的機器人。深度傳感可以幫助機器人識別哪些是貨架,并幫助它們跟蹤架子上的物體。
美國賓夕法尼亞州ifm efector公司的機器人感知業務開發負責人Garrett Place表示,深度傳感技術在機器人領域的應用越來越多。這家美國公司是德國ifm electronic的子公司,ifm electronic是擁有pmd的自動化解決方案供應商。
得益于更好的3D視覺,一項新應用得以實現,那便是卸垛。顧名思義,這項應用包括利用機器人從托盤上取下貨物,并將它們放在傳送帶上。這在工廠進貨時很常見。3D相機的使用能夠更快地定位貨物,從而提高操作效率。
“除了機器人本身的移動之外,在完成一件搬運到拾取下一件之間沒有任何延時,”Place說,“這太強大了,平均每件貨物可以節省3~5秒。”
另一個新應用案例是自動叉車。在這項任務中,自動駕駛叉車必須精確定位它需要移動叉起的貨物。使用3D相機收集所需要的信息,可以更快、更準確地完成任務,從而提高操作的速度和安全性。
在服務業也可以找到3D模組價格下跌所帶來的新興應用。例如,利用機器人手臂為人提供飲料或其他物體,深度傳感可以確保物品被安全地傳送。但是當機器人手臂接近目的位置時,手臂、物體或兩者都可能阻擋機器人“視線”。因而,可以在機器人手臂中安裝成本低廉的3D傳感器,以提供近距離3D視圖,從而提高安全性和性能。不過,這樣做需要3D相機之間的同步和數據疊加,以及與所有其他傳感器的信息融合。




























 工商網監
工商網監
評論