





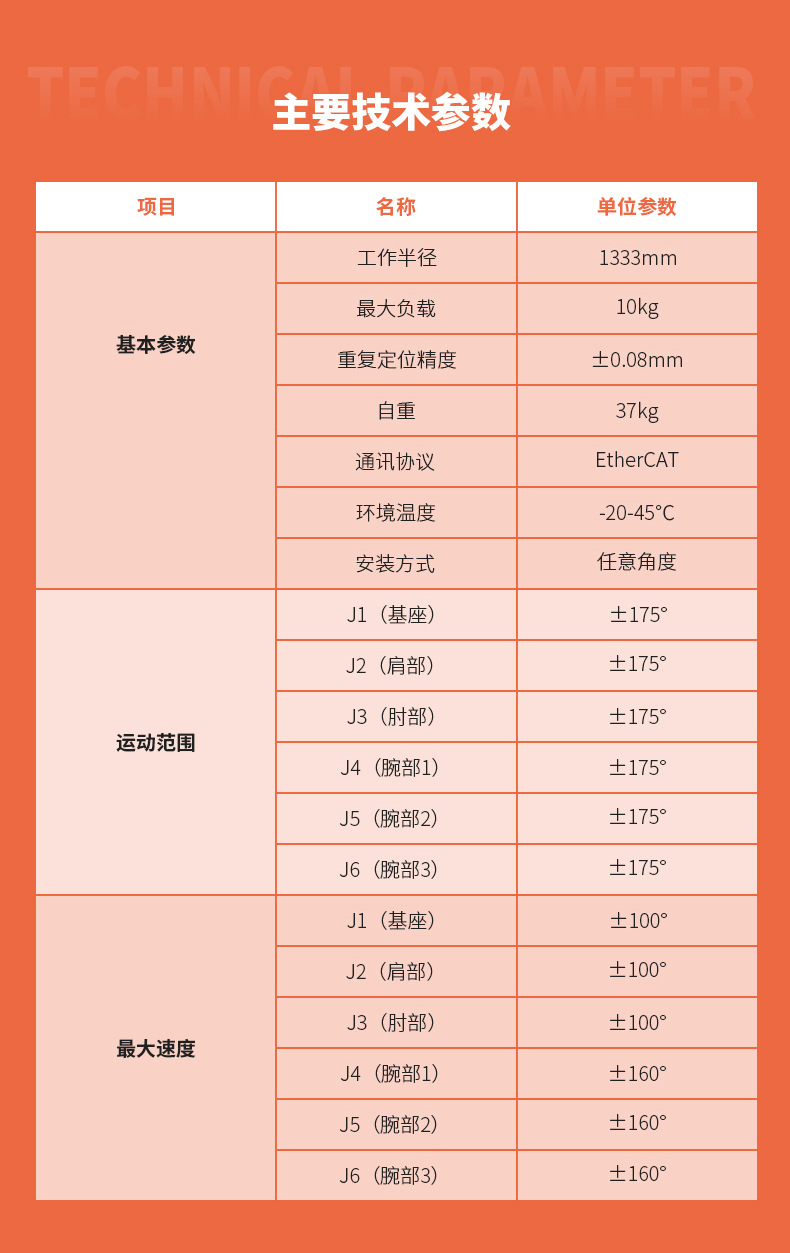
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作機器人功能強大、高自重負載比、高可靠性、模塊化關節設計,易于末端擴展外部設備,可以實現快速安裝部署。




深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作機器人功能強大、高自重負載比、高可靠性、模塊化關節設計,易于末端擴展外部設備,可以實現快速安裝部署。



















