步進(jìn)電機(jī)的可編程控制器直接控制,可使組合機(jī)床自動(dòng)生產(chǎn)線控制系統(tǒng)的成本顯著下降。文章介紹了用PLC控制步進(jìn)電機(jī)驅(qū)動(dòng)的數(shù)控滑臺(tái)方法,伺服控制、驅(qū)動(dòng)及接口以及步進(jìn)電機(jī)PLC控制的軟件邏輯。
2022-10-26 11:47:02 7024
7024 采用PLC實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。完成驅(qū)動(dòng)的接線和驅(qū)動(dòng)器的參數(shù)配置后,即可對(duì)PLC編程實(shí)現(xiàn)電機(jī)的運(yùn)轉(zhuǎn)。這里以西門子S-200smart PLC運(yùn)用舉例。
2023-03-02 14:22:353577 
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:11
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:10
PLC在步進(jìn)電機(jī)系統(tǒng)中的應(yīng)用,有需要的可以交流推薦課程:張飛軟硬開源,基于STM32 BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器視頻套件http://t.elecfans.com/topic/42.html?elecfans_trackid=bbs_post
2015-05-14 11:27:22
那些在運(yùn)行過程中移動(dòng)距離和速度均確定的具體設(shè)備,小編認(rèn)為采用PLC通過步進(jìn)電機(jī)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)是一種理想的技術(shù)方案。步進(jìn)電機(jī)的特點(diǎn):(1)步進(jìn)電機(jī)的角位移與輸入脈沖數(shù)嚴(yán)格...
2021-06-29 06:53:19
plc能否實(shí)現(xiàn)步進(jìn)電機(jī)的無(wú)級(jí)調(diào)速呢?如果可以能不能舉個(gè)例子或者哪一款plc能實(shí)現(xiàn)啊?
2023-03-23 15:32:18
STM32系列的內(nèi)核主要有什么?步進(jìn)電機(jī)的特點(diǎn)是什么?步進(jìn)電機(jī)S型加減速代碼分享
2021-12-21 07:32:32
S型加減速的優(yōu)點(diǎn)是什么?步進(jìn)電機(jī)S型加減速控制的源程序該怎樣去實(shí)現(xiàn)呢?
2021-12-20 08:04:09
硬件是:STM32+驅(qū)動(dòng)器+步進(jìn)電機(jī)。 STM32定時(shí)器輸出PWM,控制驅(qū)動(dòng)器來驅(qū)動(dòng)步進(jìn)電機(jī)。單片機(jī)只要控制電機(jī)方向,以及PWM的頻率即可,具體驅(qū)動(dòng)由驅(qū)動(dòng)器實(shí)現(xiàn)。 首先說一下什么是S型曲線
2023-03-23 15:25:01
步進(jìn)電機(jī)S型曲線加減速算法與實(shí)現(xiàn)Monte-Carlo2017-05-18 10:06:232653收藏2分類專欄:機(jī)器人運(yùn)動(dòng)學(xué)一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下
2021-07-08 09:56:46
步進(jìn)電機(jī)學(xué)習(xí)(1)步進(jìn)電機(jī)控制1 步進(jìn)電機(jī)型號(hào):14HS13-0804S-PG192 PLC型號(hào):DM542T(雷塞)3 GPIO圖(1,2靠邊緣)4 步進(jìn)電機(jī)需要驅(qū)動(dòng)器,實(shí)現(xiàn)穩(wěn)定的脈沖,自己寫
2021-07-08 07:41:20
,步距角始終不變,能夠保持精密準(zhǔn)確的位置。所以無(wú)論旋轉(zhuǎn)多少次,始終沒有積累誤差。由于控制方法簡(jiǎn)單,成本低廉,廣泛應(yīng)用于各種開環(huán)控制。步進(jìn)電機(jī)的運(yùn)行需要有脈沖分配的功率型電子裝置進(jìn)行驅(qū)動(dòng), 這就是步進(jìn)電機(jī)
2021-07-07 06:25:56
,通過不同的細(xì)分檔位設(shè)定,實(shí)現(xiàn)不同步數(shù)的細(xì)分,同時(shí)保證了不同的轉(zhuǎn)動(dòng)速度。1細(xì)分驅(qū)動(dòng)原理步進(jìn)電機(jī)控制中已蘊(yùn)含了細(xì)分的機(jī)理。如三相步進(jìn)電機(jī)按A→B→C……的順序輪流通電,步進(jìn)電機(jī)為整步工作。而按A→AC→C
2014-01-21 15:02:35
方波)。S型曲線的的方程,在[-5,5]的圖形如下圖所示:如要將此曲線應(yīng)用在步進(jìn)電機(jī)的加、減速過程中,需要將方程在XY坐標(biāo)系進(jìn)行平移,同時(shí)對(duì)曲線進(jìn)行拉升變化:其中的A分量在y方向進(jìn)行平移,B分量在y
2021-06-28 08:41:08
本文收集整理關(guān)于實(shí)現(xiàn)步進(jìn)電機(jī)自動(dòng)正反轉(zhuǎn)程序怎么寫的相關(guān)議題,使用內(nèi)容導(dǎo)航快速到達(dá)。內(nèi)容導(dǎo)航:Q1:用c語(yǔ)言程序實(shí)現(xiàn)步進(jìn)電機(jī)的正反轉(zhuǎn)加減速的編程內(nèi)容:1、本程序用于測(cè)試4相步進(jìn)電機(jī)常規(guī)驅(qū)動(dòng)2、需要用跳
2021-06-29 06:09:19
I2C總線速度為400 kHz。要以大約 18 RPM 的速度驅(qū)動(dòng)步進(jìn)電機(jī),請(qǐng)使用以下字節(jié)序列,其中“S”代表 I2C 總線啟動(dòng)條件,“P”代表停止條件。此外,DLY1 和 DLY2 是由微控制器固件實(shí)現(xiàn)
2022-10-10 10:05:42
步進(jìn)電機(jī)基礎(chǔ)(2.5)-RM型步進(jìn)電機(jī)前言基本信息公式前言說明RM型步進(jìn)電機(jī)1. RM型步進(jìn)電機(jī)的結(jié)構(gòu)2. RM型步進(jìn)電機(jī)的特征與特性前言基本信息名稱描述說明教材名稱步進(jìn)電機(jī)應(yīng)用技術(shù)作者坂本正文譯者
2021-07-08 09:41:07
TB67S109AFNAG如何實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng)?
2021-10-18 06:34:57
arduino如何驅(qū)動(dòng)步進(jìn)電機(jī),今日偶爾得到光驅(qū)電機(jī)一個(gè),經(jīng)查為一個(gè)兩項(xiàng)四線步進(jìn)電機(jī)一個(gè),由于電機(jī)驅(qū)動(dòng)電流較小,經(jīng)過一天論證試驗(yàn),采用arduino來模仿步進(jìn)電機(jī)驅(qū)動(dòng)器來實(shí)現(xiàn)此步進(jìn)電機(jī)的驅(qū)動(dòng)。將四個(gè)
2021-07-08 08:22:30
三菱FX1S PLC如何控制伺服電機(jī)?
2021-09-27 07:04:04
FX2N系列PLC,型號(hào)需要注意的是必須是MT型號(hào),MR型號(hào)的PLC無(wú)法驅(qū)動(dòng)電機(jī);1.2 I/O口分配這個(gè)控制相對(duì)簡(jiǎn)單,直接見圖;在這里插入圖片描述1.3 驅(qū)動(dòng)器接線圖在這里插入圖片描述1.4 程序程序中可以通過修改D2數(shù)值,實(shí)現(xiàn)不同的轉(zhuǎn)速,需要注意數(shù)據(jù)范圍就好;在這里插入圖片描述2 其
2021-07-08 06:05:52
多少次,始終沒有積累誤差。由于控制方法簡(jiǎn)單,成本低廉(相比于伺服電機(jī)),廣泛應(yīng)用于各種開環(huán)控制。步進(jìn)電機(jī)的運(yùn)行需要有脈沖分配的功率型電子裝置進(jìn)行驅(qū)動(dòng), 這就是步進(jìn)電機(jī)驅(qū)動(dòng)器。它接收控制系統(tǒng)發(fā)出的脈沖
2021-07-07 06:19:42
通過對(duì)步進(jìn)電機(jī)轉(zhuǎn)速控制分析,選擇合適的歩進(jìn)電機(jī)及其驅(qū)動(dòng)模塊,實(shí)現(xiàn)X軸、Y軸向工作臺(tái)精密運(yùn)動(dòng)控制。根據(jù)系統(tǒng)的機(jī)械結(jié)構(gòu)及其負(fù)載,確定電機(jī)啟動(dòng)頻率與最大運(yùn)行頻率,以使裝置具有良好的速度性能。各方向的最大平移速度為5mm/s,位置誤差不大于0.1mm;
2020-05-09 09:39:55
關(guān)于步進(jìn)電機(jī)T型和S型速度曲線的知識(shí)點(diǎn)不看肯定后悔
2021-10-12 06:49:20
如下:1.接線簡(jiǎn)單。2.由于工作電壓點(diǎn),所以溫升低,基本和步進(jìn)電機(jī)保持一致,實(shí)測(cè)溫升10幾度。3.可靠性高,由步進(jìn)驅(qū)動(dòng)器直接控制電機(jī)和抱閘,能百分百保證在電機(jī)轉(zhuǎn)動(dòng)時(shí)抱閘始終處于松開狀態(tài),且抱閘反應(yīng)時(shí)間
2019-06-20 16:50:26
-40MR-001 FX1S-60MR-001 FX1S-20MT-001 FX1S-20MT-001 FX1S-20MT-001FX1S-20MT-001FX1
2019-07-13 11:26:23
之前做電機(jī)相關(guān)的項(xiàng)目比較少,最近有個(gè)項(xiàng)目涉及到步進(jìn)電機(jī)的精確控制,參考了一些資料研究了一下S型曲線加減速,這里總結(jié)一下分享給大家。硬件是:STM32+驅(qū)動(dòng)器+步進(jìn)電機(jī)。STM32定時(shí)器輸...
2021-07-06 06:08:34
閉環(huán)系統(tǒng)在集成的電機(jī)設(shè)計(jì)中實(shí)現(xiàn),該設(shè)計(jì)包括反饋設(shè)備(編碼器),驅(qū)動(dòng)器和控制器板,電源,通信和I / O電子設(shè)備,以及電機(jī)側(cè)面和背面的系統(tǒng)連接器。 首先,我們探討在轉(zhuǎn)矩和效率方面,高性能閉環(huán)步進(jìn)電機(jī)系統(tǒng)
2023-03-10 10:06:16
怎么實(shí)現(xiàn)步進(jìn)電機(jī)S型曲線加減速算法?
2021-10-12 10:02:51
怎么實(shí)現(xiàn)STM32步進(jìn)電機(jī)S型加減速算法?
2021-10-11 07:57:55
FX2N系列PLC,型號(hào)需要注意的是必須是MT型號(hào),MR型號(hào)的PLC無(wú)法驅(qū)動(dòng)電機(jī);1.2 I/O口分配這個(gè)控制相對(duì)簡(jiǎn)單,直接見圖;1.3 驅(qū)動(dòng)器接線圖1.4 程序程序中可以通過修改D2數(shù)...
2021-07-07 07:34:48
控制步進(jìn)電機(jī)替代PLC案例一、輸入按鍵控制電機(jī)正轉(zhuǎn)、反轉(zhuǎn)實(shí)現(xiàn)功能:要求輸入 X0 接一個(gè)按鈕開關(guān)。開關(guān)閉合一次電機(jī)以 300 轉(zhuǎn)/分 的速度正轉(zhuǎn) 10 圈,再以 200 轉(zhuǎn)/分 的速度反轉(zhuǎn) 10 圈
2021-07-08 08:05:55
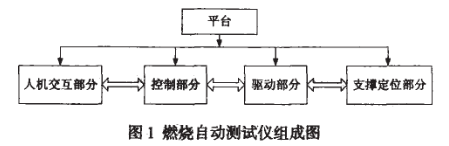
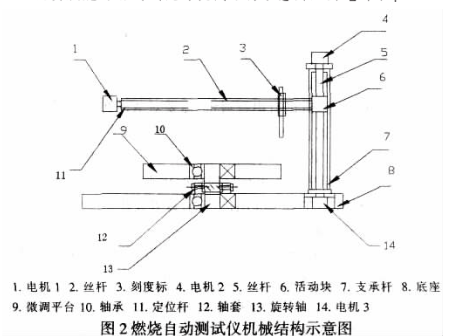
1500.44的要求,對(duì)玩具進(jìn)行水平燃燒,并且規(guī)定了玩具起火以后沿主軸線的自行燃燒速度要低2.5mm/s。 化學(xué)性能:涉及到了八種重金屬遷移與總鉛含量的測(cè)試。和N71-3不同的是,ASTM F
2021-04-14 16:31:04
跪求四相八拍步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)裝置Proteus 仿真圖挺急的!!!幫幫我
2019-12-12 08:37:03
本文設(shè)計(jì)了一個(gè)五相步進(jìn)電機(jī)全數(shù)字恒流驅(qū)動(dòng)系統(tǒng)。
2009-04-02 15:09:43 32
32 本文主要說明四相八拍中步進(jìn)電機(jī)的PLC編程控制。
2009-04-02 16:12:0532 研究設(shè)計(jì)自動(dòng)超聲成像系統(tǒng)的步進(jìn)電機(jī)驅(qū)動(dòng)控制電路, 驅(qū)動(dòng)步進(jìn)電機(jī)的工作, 并通過計(jì)算機(jī)準(zhǔn)確控制換能器在檢測(cè)工件時(shí)的位置, 實(shí)現(xiàn)指定區(qū)域內(nèi)的精確掃描。實(shí)驗(yàn)結(jié)果表明該技
2009-04-06 17:03:3945 針對(duì)兩個(gè)同軸的步進(jìn)電機(jī)的轉(zhuǎn)矩與驅(qū)動(dòng)功率不足問題,提出一種多步進(jìn)電機(jī)同軸聯(lián)接及驅(qū)動(dòng)的創(chuàng)新設(shè)計(jì)方法并得到了成功應(yīng)用。該項(xiàng)技術(shù)已獲中國(guó)國(guó)家專利。本文給出了MCS-51單片
2009-05-27 16:44:275 提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計(jì)方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對(duì)四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計(jì)總體方
2009-08-11 11:14:5089 本文介紹一種PLC 間通信的步進(jìn)電機(jī)遠(yuǎn)程閉環(huán)控制的方案,主要介紹了系統(tǒng)構(gòu)成、主站和從站的程序編制,步進(jìn)電機(jī)的驅(qū)動(dòng)實(shí)現(xiàn),該方案簡(jiǎn)單、實(shí)用,適合用于作業(yè)與控制分離的場(chǎng)
2009-08-15 09:28:4735 針對(duì)單個(gè)步進(jìn)電機(jī)的轉(zhuǎn)矩與驅(qū)動(dòng)功率不足問題,提出一種雙步進(jìn)電機(jī)同軸聯(lián)接及驅(qū)動(dòng)的創(chuàng)新設(shè)計(jì)方法并得到了成功應(yīng)用。該相關(guān)技術(shù)已獲中國(guó)國(guó)家專利,本文給出了MCS-51 單片機(jī)控
2009-08-27 11:40:5621 一種小功率步進(jìn)電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)與實(shí)現(xiàn): 步進(jìn)電機(jī)驅(qū)動(dòng)電路的核心部分是環(huán)行脈沖分配器. 本文給出了一種兩相永磁式步進(jìn)電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)方案. 它包括基于E2PROM和可逆計(jì)
2009-09-21 08:38:5180 MOTEC 步進(jìn)電機(jī)及驅(qū)動(dòng)器:德國(guó)MOTEC公司多年以來一直致力于步進(jìn)電機(jī)及驅(qū)動(dòng)器的研究、開發(fā)、生產(chǎn)工作,是世界上步進(jìn)驅(qū)動(dòng)系統(tǒng)行業(yè)的領(lǐng)先者。該公司生產(chǎn)的兩項(xiàng)混合式步進(jìn)電機(jī)正弦
2010-01-09 10:21:5955 闡述了步進(jìn)電機(jī)的驅(qū)動(dòng)原理,介紹了恒流斬波、脈寬調(diào)制及細(xì)分驅(qū)動(dòng)等步進(jìn)電機(jī)驅(qū)動(dòng)電路的結(jié)構(gòu)設(shè)計(jì)方法和設(shè)計(jì)中的相關(guān)技術(shù),并給出了實(shí)現(xiàn)方案。關(guān)鍵詞:步進(jìn)電機(jī); 恒流斬波; 脈
2010-01-09 13:41:4999 本文介紹一種PLC間通信的步進(jìn)電機(jī)遠(yuǎn)程閉環(huán)控制的方案,主要介紹了系統(tǒng)構(gòu)成、主站和從站的程序編制,步進(jìn)電機(jī)的驅(qū)動(dòng)實(shí)現(xiàn),該方案簡(jiǎn)單、實(shí)用,適合用于作業(yè)與控制分離的場(chǎng)合
2010-07-20 15:12:4235 提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計(jì)方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對(duì)四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計(jì)總體方案
2010-07-21 09:31:1761 本系統(tǒng)采用STM32作為主控制芯片,用L298驅(qū)動(dòng)步進(jìn)電機(jī),并由按鍵分別控制步進(jìn)電機(jī)的啟/停,快速/慢速,整步/半步,正轉(zhuǎn)/反轉(zhuǎn),發(fā)光二極管顯示按鍵情況。實(shí)現(xiàn)了步進(jìn)電機(jī)的基本功
2010-09-23 16:00:07719 采用Allero公司新一代的兩相步進(jìn)電機(jī)驅(qū)動(dòng)器A3992和系統(tǒng)級(jí)MCU器件C8051F300設(shè)計(jì)了小型步進(jìn)電機(jī)的硬件驅(qū)動(dòng)電路。該驅(qū)動(dòng)電路通過3線串行接口可方便地控制A3992,實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的細(xì)分驅(qū)
2010-12-20 17:19:31115 plc步進(jìn)電機(jī)原理圖
PLC選用日本松下FP0 PLC,共8點(diǎn)輸入(X0~X7),8點(diǎn)輸出(Y0~Y7),主要控制主電機(jī)Motor1
2008-05-22 11:49:579471 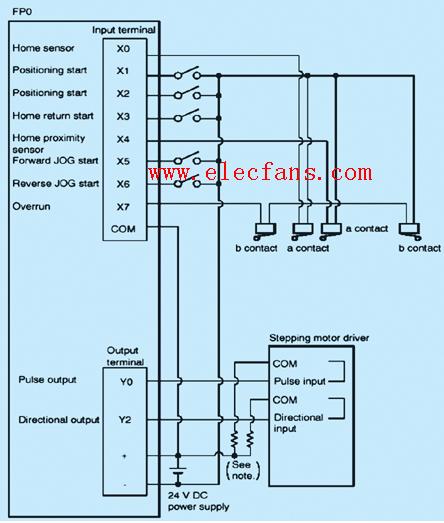
plc控制步進(jìn)電機(jī)程序
·
2008-10-09 15:20:1811873 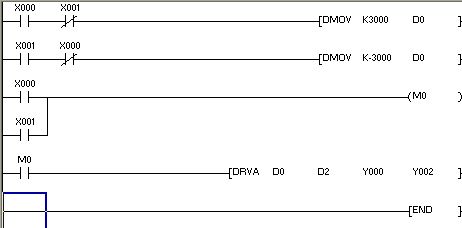
四相步進(jìn)電機(jī)驅(qū)動(dòng)電路和驅(qū)動(dòng)程序
步進(jìn)電機(jī)驅(qū)動(dòng)器系統(tǒng)電路原理圖
2008-10-21 00:42:206696 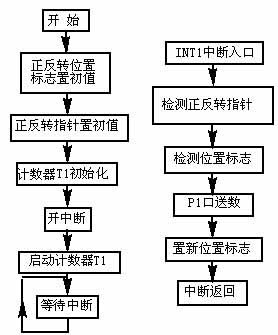
適用PLC使用的步進(jìn)電機(jī)控制驅(qū)動(dòng)器
本文介紹了一種新型步進(jìn)電機(jī)控制驅(qū)動(dòng)器。該驅(qū)動(dòng)器充分利用了單片機(jī)軟件控制靈活和PLC的ΔC門控制
2009-06-18 14:34:402495 
步進(jìn)電機(jī)的PLC直接控制
步進(jìn)電機(jī)的可編程控制器直接控制,可使組合機(jī)床自動(dòng)生產(chǎn)線控制系統(tǒng)的成本顯著下降。文章介紹了用PLC控制步
2009-06-19 14:09:032832 
基于A3967SLB的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
摘 要: 本文以Allegro公司推出的A3967SLB型串口控制器為步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)系統(tǒng)的硬件核心,實(shí)現(xiàn)了步進(jìn)電機(jī)
2009-09-17 15:01:223799 基于89C2051的步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
設(shè)計(jì)了一種基于89C2051單片機(jī)的步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)。該系統(tǒng)優(yōu)化了電機(jī)在不同
2009-09-17 15:06:451256 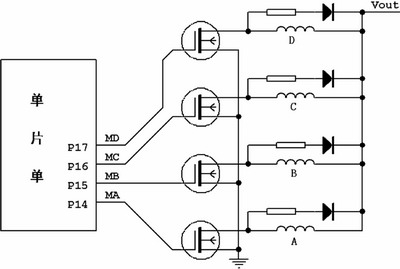
步進(jìn)電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)與實(shí)現(xiàn)研究,下來看看
2016-04-25 10:10:0722 步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)初探,有需要的下來看看
2016-04-25 10:10:0739 基于89C2051的步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
2016-04-25 10:40:3614 本文研究了一種應(yīng)用于經(jīng)濟(jì)型數(shù)控系統(tǒng)的混合式步進(jìn)電機(jī)驅(qū)動(dòng)裝置的設(shè)計(jì)技術(shù)。 文中詳述了該驅(qū)動(dòng)裝置的構(gòu)成原理,并結(jié)合在經(jīng)濟(jì)型數(shù)控系統(tǒng)的應(yīng)用講述其應(yīng)用技巧。
2016-05-11 15:26:212 三菱PLC(可編程邏輯控制器)編程實(shí)例項(xiàng)目例程-控制步進(jìn)電機(jī),網(wǎng)焊機(jī)使用FX1N-40MT控制步進(jìn)電機(jī)
2022-05-17 11:14:3220 介紹一種基于步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)矩頻特性的“計(jì)時(shí)”測(cè)試理論,研制的步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)矩頻特性測(cè)試系統(tǒng)。該系統(tǒng)由自制的整形電路、異或檢相器和MCS8098單片機(jī)組成。
2017-08-31 16:08:235 在紡織機(jī)的送經(jīng)裝置中。 用可編程控制器《PLC)聲生各種步進(jìn)脈沖驅(qū)動(dòng)步進(jìn)電帆去達(dá)到各種控制、測(cè)試目的己展見不蟬了。步進(jìn)電機(jī)由于旦有轉(zhuǎn)子慣量低、定位精度高、無(wú)累積誤差、控制衙草等特點(diǎn),戚了工控的主要執(zhí)行元件之一,尤真
2017-11-08 16:12:407 本系統(tǒng)擬計(jì)劃采用DSP控制步進(jìn)電機(jī)推動(dòng)輕裝置移動(dòng)實(shí)現(xiàn)測(cè)量裝置的精準(zhǔn)定位。系統(tǒng)擬采用的主控制器為DSP28335,被控對(duì)象為最小步進(jìn)角為1.8的42步進(jìn)電機(jī),采用DSP輸出PWM脈沖波通過電機(jī)驅(qū)動(dòng)
2018-02-11 14:35:007587 
本文檔內(nèi)容介紹了基于步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)建模,供參考
2018-03-02 14:08:2714 三菱PLC FX系列的基本邏輯指令、FX系列PLC的步進(jìn)指令
2019-03-07 16:07:229078 步進(jìn)電機(jī)是一種很常見的動(dòng)力元件,步進(jìn)電機(jī)可以很方便的由控制系統(tǒng)控制其速度與轉(zhuǎn)動(dòng)方向。那么使用PLC如何控制步進(jìn)的速度與方向呢。
2020-02-16 22:37:5820197 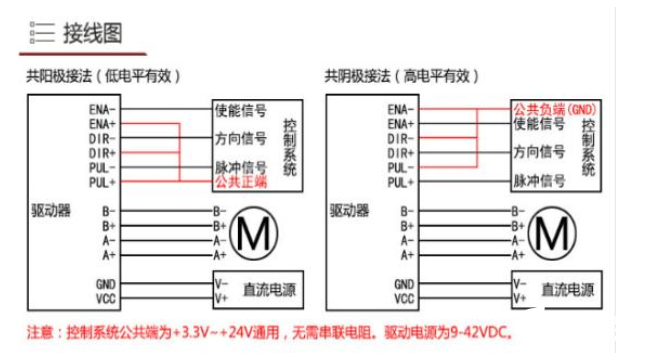
簡(jiǎn)要介紹利用 PLC 控制步進(jìn)電機(jī)對(duì)執(zhí)行元件進(jìn)行自動(dòng)分度, 重點(diǎn)介紹一種 PLC 控制步進(jìn)電機(jī)的分度算法, 可實(shí)現(xiàn) 360°內(nèi)轉(zhuǎn)角誤差為 0, 保證了精確分度, 并給出分度算法梯形圖。
2020-04-28 08:00:001 在對(duì)步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)原理進(jìn)行研究的基礎(chǔ)上,提出了一種采用FPGA 實(shí)現(xiàn)步進(jìn)電機(jī)恒轉(zhuǎn)矩細(xì)分驅(qū)動(dòng)的方法。利用FPGA 芯片中的嵌入式陣列塊(EAB)構(gòu)成LPM-ROM 來存儲(chǔ)步進(jìn)電機(jī)各相細(xì)分電流的數(shù)據(jù)
2020-07-24 16:51:3928 步進(jìn)電機(jī)是一種離散步進(jìn)運(yùn)動(dòng)的電磁裝置。 它有幾個(gè)線圈,組成“相位”,當(dāng)每相依次通電時(shí)驅(qū)動(dòng)電機(jī)。
2020-10-05 16:42:0013653 plc作為一種工業(yè)操控核算機(jī),具有模塊化構(gòu)造、裝備活絡(luò)、高速的處理速度、準(zhǔn)確的數(shù)據(jù)處理才調(diào)、PLC對(duì)步進(jìn)電機(jī)也具有超卓的操控才調(diào),運(yùn)用其高速脈沖輸出功用或運(yùn)動(dòng)操控功用,即可結(jié)束對(duì)步進(jìn)電機(jī)的操控。
2020-09-26 11:09:036325 本文以某物流控制中的機(jī)械手控制為例,分析了PLC與步進(jìn)驅(qū)動(dòng)裝置的控制方法,本系統(tǒng)涉及的主要硬件是s7-200plc和sh-2h057步進(jìn)驅(qū)動(dòng)器。
2020-10-21 16:02:191837 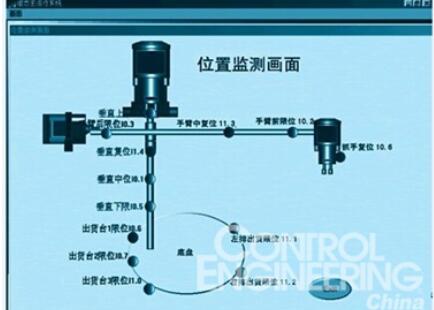
Arduino是一款便捷靈活、方便上手的開源電子原型平臺(tái)。與常見的 DSP PLC ARN51單片機(jī)不同Arduino具有編程簡(jiǎn)單,操作方便,價(jià)格便宜等諸多優(yōu)點(diǎn)。本文介紹基于 Arduino t的進(jìn)步電機(jī)系統(tǒng),通過步進(jìn)電機(jī)驅(qū)動(dòng)器驅(qū)動(dòng)步進(jìn)電機(jī),可實(shí)現(xiàn)定位控制。結(jié)果表明該系統(tǒng)操作簡(jiǎn)單,性能可靠。
2020-12-07 08:00:002 用可編程控制器(PLC)產(chǎn)生各種步進(jìn)脈沖驅(qū)動(dòng)步進(jìn)電機(jī)去達(dá)到各種控制、測(cè)試目的己屢見不鮮了。步進(jìn)電機(jī)由于具有轉(zhuǎn)子慣量低、定位精度高、無(wú)累積誤差、控制簡(jiǎn)單等特點(diǎn),成了工控的主要執(zhí)行元件之一,尤其是在精確定位場(chǎng)合中得到了廣泛的應(yīng)用。但近年來,人們更關(guān)注的卻是它的變頻特性。
2020-12-31 10:10:167410 
基于PLC步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)說明。
2021-05-19 10:01:07104 用PWM實(shí)現(xiàn)儀表步進(jìn)電機(jī)的微步細(xì)分驅(qū)動(dòng) 儀表步進(jìn)電機(jī)應(yīng)用較早的是瑞士SWITEC公司的XC5系列步進(jìn)電機(jī),隨著國(guó)產(chǎn)同類產(chǎn)品的成熟,小型儀表步進(jìn)電機(jī)應(yīng)用更加廣泛。目前,國(guó)內(nèi)外常用的幾種儀表步進(jìn)
2021-12-06 11:21:0923 網(wǎng)焊機(jī)使用FX1N-40MT控制步進(jìn)電機(jī)的,PLC源碼程序。
2022-05-05 15:05:410 FX 系列 PLC 有基本順控指令 20 或 27 條、步進(jìn)梯形圖指令 2 條、應(yīng)用(功能)指令 100 多條(不同系列有所不同)。下面介紹其中最基本順控指令和步進(jìn)指令及其應(yīng)用。
2022-07-10 14:35:355398 FX2N-10PG脈沖輸出模塊(以后簡(jiǎn)稱為FX2N-10PG,脈沖輸出模塊或是PGU)是最大輸出1MHz脈沖列并且驅(qū)動(dòng)單軸的步進(jìn)電機(jī)和伺服電機(jī)的特殊模塊。
2022-09-01 14:15:200 電子發(fā)燒友網(wǎng)站提供《如何測(cè)試TB6600步進(jìn)電機(jī)驅(qū)動(dòng)器控制器和步進(jìn)電機(jī).zip》資料免費(fèi)下載
2022-12-06 15:51:083 在上一篇文章“兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng) 其1”中,給出了兩相雙極步進(jìn)電機(jī)的基本驅(qū)動(dòng)電路示例和驅(qū)動(dòng)波形。此次“兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng) 其2”篇,將介紹驅(qū)動(dòng)兩相雙極步進(jìn)電機(jī)過程中電流再生時(shí)的Decay:電流衰減。
2023-02-24 09:51:111395 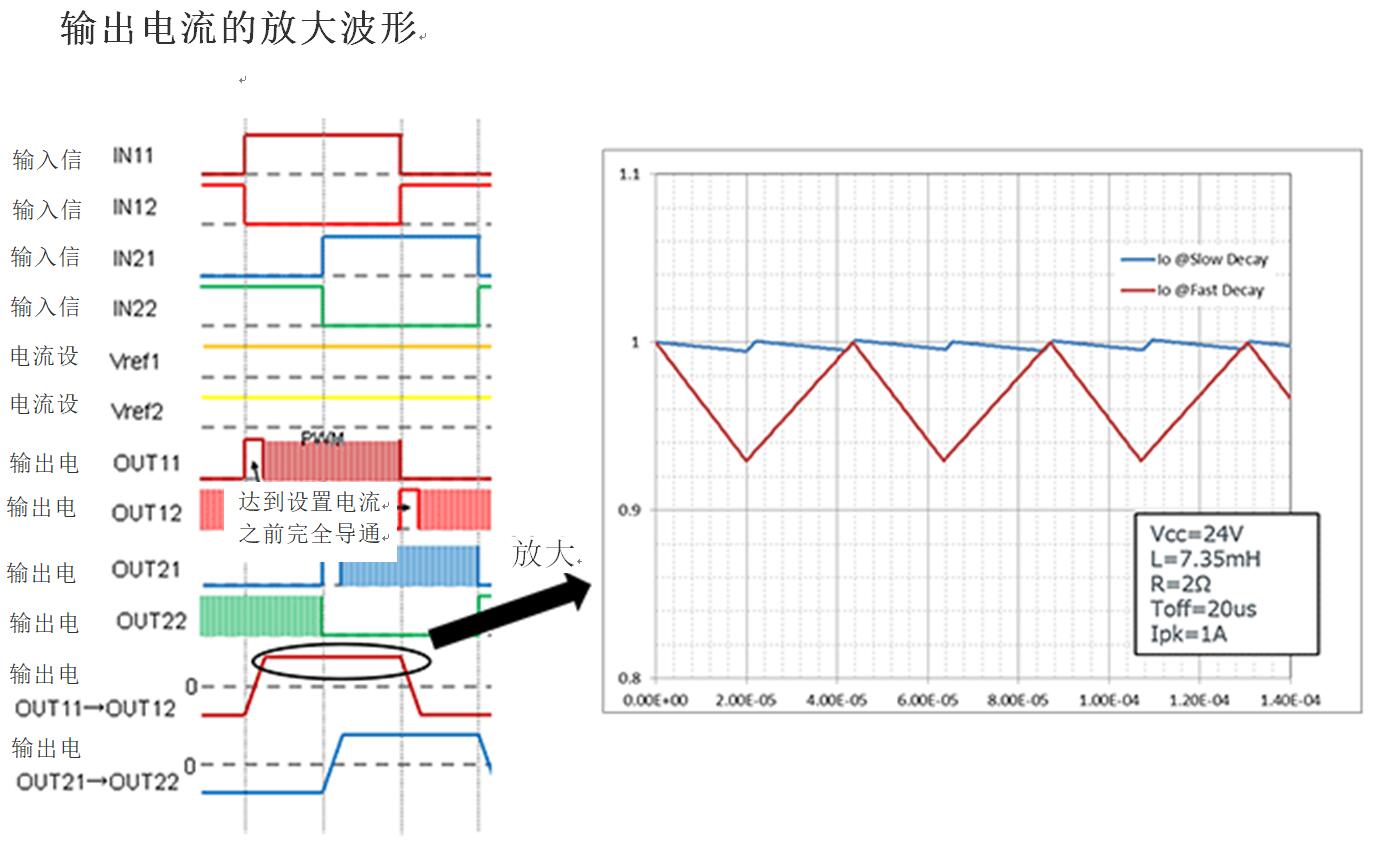
最簡(jiǎn)單的步進(jìn)電機(jī)驅(qū)動(dòng)方法是單相雙極驅(qū)動(dòng)方式,也稱為雙相步進(jìn)驅(qū)動(dòng)方式。該方式只需要使用一個(gè) H橋驅(qū)動(dòng)器和一個(gè)脈沖發(fā)生器,即可實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng)控制。
2023-03-08 14:21:5612542 今天來簡(jiǎn)單測(cè)試一下用STM32驅(qū)動(dòng)步進(jìn)電機(jī)。
方法是通過STM32控制A4988模塊來驅(qū)動(dòng)步進(jìn)電機(jī)。A4988 是一款帶轉(zhuǎn)換器和過流保護(hù)的 DMOS 微步進(jìn)電機(jī)驅(qū)動(dòng)器,它用于操作雙極步進(jìn) 電機(jī)
2023-03-21 11:02:378 PLC作為一種工業(yè)控制計(jì)算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對(duì)步進(jìn)電機(jī)也具有
良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制
2023-03-22 11:06:590 五線四相步進(jìn)電機(jī)驅(qū)動(dòng)測(cè)試程序(2個(gè)步進(jìn)電機(jī))
2023-03-22 14:18:406 FX2N系列PLC,型號(hào)需要注意的是必須是MT型號(hào),MR型號(hào)的PLC無(wú)法驅(qū)動(dòng)電機(jī); 1.2 I/O口分配這個(gè)控制相對(duì)簡(jiǎn)單,直接見圖;在這里插入圖片描述 1.3 驅(qū)動(dòng)器接線圖在這里插入圖片描述 1.4 程
2023-03-22 09:53:101 SSD2608PC 步進(jìn)電機(jī)驅(qū)動(dòng)器控制 開環(huán)57兩相步進(jìn)電機(jī)CanOpen通訊 測(cè)試硬件倍福CX5130+EL6751 CANOPEN主站模塊 研控步進(jìn)電機(jī)驅(qū)動(dòng)器 SSD2608PC(閉環(huán)式步進(jìn)電機(jī)
2023-03-23 14:21:500 plc作為一種工業(yè)控制計(jì)算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對(duì)步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。對(duì)于
2023-08-07 08:09:361051 
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-08-25 11:15:10649 
步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動(dòng),這種裝置就是步進(jìn)電機(jī)驅(qū)動(dòng)器,它是把控制系統(tǒng)發(fā)出的脈沖信號(hào),加以放大以驅(qū)動(dòng)步進(jìn)電機(jī)。步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號(hào)的頻率成正比,控制步進(jìn)電機(jī)脈沖信號(hào)的頻率,可以對(duì)電機(jī)精確調(diào)速;控制步進(jìn)脈沖的個(gè)數(shù),可以對(duì)電機(jī)精確定位。
2023-10-19 10:59:42262 
基于步進(jìn)電機(jī)驅(qū)動(dòng)原理,對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)方式進(jìn)行分析,提出了基于西門子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計(jì)。通過測(cè)試,該裝置能對(duì)位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動(dòng)控制教學(xué)實(shí)訓(xùn),在自動(dòng)化裝置中有較好的推廣價(jià)值。
2023-10-23 14:38:162574 
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-10-30 11:30:52940 
步進(jìn)電機(jī)驅(qū)動(dòng)器是一種常見的電機(jī)驅(qū)動(dòng)裝置,可用于控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)。調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器的撥碼開關(guān)可以改變其工作模式和參數(shù)設(shè)置,以滿足不同的應(yīng)用需求。下面是一個(gè)詳細(xì)解釋如何調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器撥碼開關(guān)
2024-01-15 13:56:45737 電路原理 步進(jìn)電機(jī)是一種開環(huán)控制系統(tǒng),通過不同的脈沖信號(hào)控制轉(zhuǎn)子旋轉(zhuǎn)的一種電機(jī)。步進(jìn)電機(jī)驅(qū)動(dòng)電路主要由電源、脈沖發(fā)生器、電流放大器和MOSFET等元件組成。下面將逐步介紹各個(gè)部分的原理。 電源:供應(yīng)電流和電壓給步進(jìn)電機(jī)
2024-01-24 10:46:14480 PLC接步進(jìn)電機(jī)或者伺服驅(qū)動(dòng)器的時(shí)候,要不要加裝電阻? 在PLC接步進(jìn)電機(jī)或伺服驅(qū)動(dòng)器時(shí),是否需要加裝電阻這個(gè)問題存在很多不同的觀點(diǎn)和解釋。 首先,讓我們先了解一下步進(jìn)電機(jī)和伺服驅(qū)動(dòng)器的基本原理
2024-02-18 15:13:59475
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論