 電子發(fā)燒友App
電子發(fā)燒友App


雖然?FPGA?可使用 Verilog 或 VHDL 等低層次硬件描述語言 (HDL) 來編程,但現(xiàn)在已有多種高層次綜合 (HLS) 工具可以采用以 C/C++ 之類的更高層次的語言編寫的算法描述,并將其轉(zhuǎn)換為 Verilog 或 VHDL 等低層次的硬件描述語言。隨后,下游工具即可對轉(zhuǎn)換后的語言進行處理,以便對 FPGA 器件進行編程。此類流程的主要優(yōu)勢在于,您可使用諸如 C/C++ 等編程語言來編寫高效代碼,而后將代碼轉(zhuǎn)換為硬件,但這類編程語言的優(yōu)勢仍能得以完整保留。此外,寫好代碼乃是軟件設(shè)計師的專長,比學習新的硬件描述語言更簡單。
以 C/C++ 編寫的程序本質(zhì)上是專為馮諾依曼樣式的架構(gòu)編寫的,此類架構(gòu)中用戶程序內(nèi)的每條指令都是按順序執(zhí)行的。為了實現(xiàn)高性能,HLS 工具必須推斷順序代碼中的并行性,并利用它來實現(xiàn)更高的性能。要解決這個問題可并不簡單。此外,優(yōu)秀的軟件程序員按明確定義的規(guī)則和實踐來編寫程序,例如,RTTI、遞歸和動態(tài)存儲器分配。其中諸多技巧在硬件中都無法找到直接等效的對象,故而給 HLS 工具帶來了諸多挑戰(zhàn)。這也意味著任意現(xiàn)成軟件都無法高效轉(zhuǎn)換為硬件。最低限度,需檢驗此類軟件中是否存在不可綜合的構(gòu)造,并需要重構(gòu)代碼,使其可綜合。
現(xiàn)如今,即使軟件程序可自動轉(zhuǎn)換(或綜合)為硬件,但要實現(xiàn)可接受的結(jié)果質(zhì)量 (QoR),仍需要額外工作(例如,重寫軟件)以幫助 HLS 工具實現(xiàn)期望的性能目標。為此,您需要了解正確編寫軟件的最佳實踐,以確保在 FPGA 器件上正常執(zhí)行軟件。在接下來的幾個章節(jié)內(nèi),將著重探討如何首先識別部分宏觀級別架構(gòu)最優(yōu)化以明確程序結(jié)構(gòu),然后聚焦更細化的微觀級別架構(gòu)最優(yōu)化來實現(xiàn)性能目標。
生產(chǎn)者使用者范例
請考慮軟件設(shè)計師編寫多線程程序的方式,通常有一個主線程用于執(zhí)行某些初始化步驟,隨后分叉為多個子線程用于執(zhí)行某些并行計算,當所有并行計算都完成后,主線程會整理結(jié)果并寫入輸出。程序員必須理清哪些部分可以分叉以供并行計算,哪些部分需要按順序執(zhí)行。這種分叉/連接類型的并行化操作不僅適用于 CPU,也適用于 FPGA,但 FPGA 上的吞吐量的關(guān)鍵模式之一是生產(chǎn)者使用者范例。您需要將生產(chǎn)者使用者范例應用于順序程序,并將其轉(zhuǎn)換為可并行執(zhí)行的抽取功能以便提升性能。
您可借助一條簡單的問題語句的幫助來更好地理解這個分解進程。假定您有一份數(shù)據(jù)手冊,可供我們將其中的項導入列表。隨后,您將對列表中的每個項進行處理。處理完每個項需耗時約 2 秒。處理完后,您將把結(jié)果寫入另一份數(shù)據(jù)手冊,此操作將耗時約每項各 1 秒。因此,如果輸入 Excel 工作表中有總計 100 個項,那么將耗時總計 300 秒來生成輸出。這樣做的目的是對此問題進行分解,以便您識別能夠并行執(zhí)行的任務,從而提升系統(tǒng)吞吐量。
圖 1. 程序工作流程
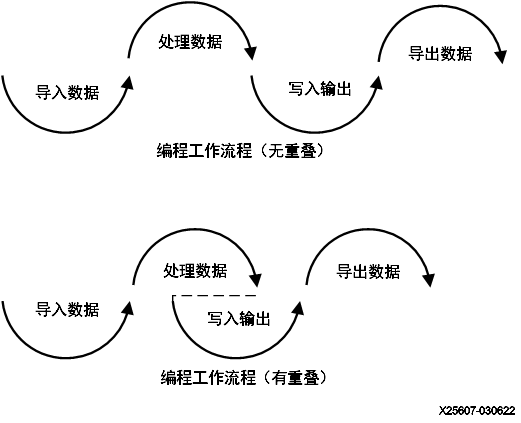
第一步是了解程序工作流程,識別獨立的任務或函數(shù)。整個工作流程分 4 個步驟,類似上圖所示的程序工作流程(無重疊)。在此示例中,“寫入輸出”(步驟 3)任務獨立于“處理數(shù)據(jù)”(步驟 2)處理任務。雖然步驟 3 取決于步驟 2 的輸出,但當步驟 2 中的任意項完成處理后,您即可立即將其寫入輸出文件。您無需等待所有數(shù)據(jù)都完成處理后再開始將數(shù)據(jù)寫入輸出文件。此類型的交織/重疊任務執(zhí)行方式是非常常見的原則。如上圖所示(例如:含重疊的程序工作流程)。如圖所示,含重疊的工作流程比不含重疊時更快完成。現(xiàn)在,您可將步驟 2 視作為生產(chǎn)者,將步驟 3 視作為使用者。生產(chǎn)者使用者模式對于 CPU 性能的影響有限。您可交織執(zhí)行每個線程的步驟,但這需要謹慎分析,以便充分利用底層多線程和 L1 高速緩存架構(gòu),因此較為耗時。但在 FPGA 上,由于可采用定制架構(gòu),生產(chǎn)者和使用者線程可以同時執(zhí)行,開銷極低甚至沒有,因此能夠顯著提升吞吐量。
首先考量的最簡單案例是單一生產(chǎn)者和單一使用者通過大小有限的緩沖器來進行通信。如果緩沖器已滿,那么生產(chǎn)者可以選擇阻塞/停滯或者丟棄數(shù)據(jù)。當使用者從緩沖器中移除某個項后,它會通知生產(chǎn)者,生產(chǎn)者隨后開始再次填充緩沖器。如果使用者發(fā)現(xiàn)緩沖器已空,則可以同樣方式停滯。當生產(chǎn)者將數(shù)據(jù)置入緩沖器后,它會喚醒休眠中的使用者。該解決方案可通過進程間通信(通常使用監(jiān)控器或信號量)來實現(xiàn)。不充分的解決方案可能導致死鎖,即兩個進程都停滯并等待喚醒。但在單一生產(chǎn)者和使用者的情況下,通信模式與先入先出 (FIFO) 或乒乓緩沖器 (PIPO) 實現(xiàn)之間存在強映射關(guān)系。這種類型的通道無需依賴信號量、互斥體或監(jiān)控器來進行數(shù)據(jù)傳輸,即可提供高效的數(shù)據(jù)通信。使用此類鎖定原語對于性能可能開銷較大,并且難以使用和調(diào)試。PIPO 和 FIFO 是常用的選擇,因為可以避免端到端的原子同步需求。
在此類宏觀級別架構(gòu)最優(yōu)化中,可通過緩沖器封裝通信,使程序員可免于擔心存儲器模型和其它非確定性行為(如爭用條件等)。在此類設(shè)計中可達成的網(wǎng)絡(luò)類型為純粹的“數(shù)據(jù)流網(wǎng)絡(luò)”,可在輸入側(cè)接受串流數(shù)據(jù),對此數(shù)據(jù)串流執(zhí)行一些基本處理,然后將其作為數(shù)據(jù)串流發(fā)出。并行程序的復雜性完全被抽離。請注意,“導入數(shù)據(jù)”(步驟 1)和“導出數(shù)據(jù)”(步驟 4)同樣在最大程度提升可用的并行性方面扮演著相應的角色。為了使計算能夠與 I/O 成功重疊,重要的是第一步對輸入的讀取結(jié)果進行封裝,最后一步則是寫入輸出。這樣即可實現(xiàn) I/O 與計算的最大程度重疊。在計算步驟中間讀取或?qū)懭胼斎?輸出端口將會限制設(shè)計的可用并發(fā)性。這同樣是在對設(shè)計工作流程進行設(shè)計時需要牢記的。
最后,此類“數(shù)據(jù)流網(wǎng)絡(luò)”的性能依賴于設(shè)計師能夠持續(xù)向網(wǎng)絡(luò)饋送數(shù)據(jù),使數(shù)據(jù)能夠在系統(tǒng)中保持串流。數(shù)據(jù)流中出現(xiàn)中斷可能導致性能下降。視頻串流應用就是一個很好的例子,比如在線游戲中,實時高清 (HD) 視頻持續(xù)流經(jīng)系統(tǒng),幀處理率受到持續(xù)監(jiān)控,以確保滿足期望的結(jié)果質(zhì)量。游戲玩家可以在屏幕上立即觀察到幀處理率下降。假想一下,這能為一大群游戲玩家提供持續(xù)性幀率支持,同時功耗相比傳統(tǒng) CPU 或 GPU 架構(gòu)顯著降低 - 這就是硬件加速的魅力。使數(shù)據(jù)在生產(chǎn)者與使用者之間持續(xù)保持流動至關(guān)重要。下一步,您將深入了解本節(jié)中介紹的這種串流范例。
串流數(shù)據(jù)范例
串流是一種重要的抽象:它表示無限制的連續(xù)更新數(shù)據(jù)集,其中“無限制”表示“大小未知或者大小無限”。串流可以是一連串數(shù)據(jù)(標量或緩沖器)在源(生產(chǎn)者)進程與目標(使用者)進程之間單向流動。串流范例會強制您根據(jù)數(shù)據(jù)訪問模式(或序列)來思考。在軟件中,隨機存儲器對數(shù)據(jù)的訪問幾乎是免費的(忽略高速緩存成本),但在硬件中,執(zhí)行順序訪問實際上是很有利的,此類訪問可轉(zhuǎn)換為串流。將算法分解為生產(chǎn)者使用者關(guān)系并通過網(wǎng)絡(luò)串流數(shù)據(jù)來進行通信具有如下所述幾大優(yōu)勢。它允許程序員以順序方式定義算法,并通過其它方式來提取并行度(例如,通過編譯器)。諸如任務間同步等復雜性會被抽離。它允許生產(chǎn)者和使用者任務同時處理數(shù)據(jù),這是提升吞吐量的關(guān)鍵。另一個優(yōu)勢是代碼更清潔且更簡單。
如前文所述,對于生產(chǎn)者和使用者范例,數(shù)據(jù)傳輸模式與 FIFO 或 PIPO 緩沖器實現(xiàn)之間存在強映射關(guān)系。FIFO 緩沖器只是預定義大小/深度的隊列,其中插入隊列的首個元素也會成為可從隊列跳出的首個元素。使用 FIFO 緩沖器的主要優(yōu)勢在于,只要生產(chǎn)者將數(shù)據(jù)插入緩沖器,使用者進程就可以立即在 FIFO 緩沖器內(nèi)部開始訪問數(shù)據(jù)。使用 FIFO 緩沖器的唯一問題在于,由于生產(chǎn)者與使用者之間的生產(chǎn)/使用速率不同,可能導致 FIFO 緩沖器大小錯誤,從而導致死鎖。在具有多個生產(chǎn)者和使用者的設(shè)計中,這種情況較為常見。乒乓緩沖器屬于用于加速進程的雙緩沖器,可將 I/O 操作與數(shù)據(jù)處理操作重疊。其中一個緩沖器用于保存數(shù)據(jù)塊,以便使用者進程能夠看到完整(舊)版本的數(shù)據(jù),而另一個緩沖器中,生產(chǎn)者進程則正在創(chuàng)建新(部分)版本的數(shù)據(jù)。當新的數(shù)據(jù)塊完成并有效時,使用者和生產(chǎn)者進程將交換對兩個緩沖器的訪問。由此導致,使用乒乓緩沖器會增加器件的整體吞吐量,并幫助防止出現(xiàn)最終瓶頸。PIPO 的主要優(yōu)勢在于,工具能夠?qū)⑸a(chǎn)速率與使用速率自動匹配,并創(chuàng)建高性能且無死鎖的通信通道。此處值得注意的是,無論使用的是 FIFO 還是 PIPO,關(guān)鍵特性是相同的:生產(chǎn)者將數(shù)據(jù)塊發(fā)送或者串流至使用者。數(shù)據(jù)塊可以是單個值,也可以是一組 N 個值。塊越大,所需存儲器資源越多。
以下是簡單的求和應用,用于展示經(jīng)典的串流網(wǎng)絡(luò)/數(shù)據(jù)流網(wǎng)絡(luò)。在此例中,該應用的目標是成對添加隨機數(shù)值串流,然后打印這些數(shù)值。前兩個任務(任務 1 和 2)提供了隨機數(shù)值串流以供添加。這些數(shù)值通過 FIFO 通道發(fā)送到求和任務(任務 3),任務 3 會從 FIFO 通道讀取值。隨后,求和任務將輸出發(fā)送到打印任務(任務 4),以發(fā)布結(jié)果。FIFO 通道可在這些獨立的執(zhí)行線程之間提供異步緩沖。
圖 2. 串流網(wǎng)絡(luò)/數(shù)據(jù)流網(wǎng)絡(luò)
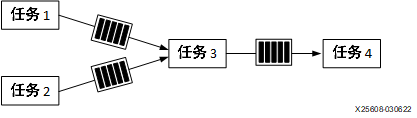
連接每項“任務”的串流通常是作為 FIFO 隊列來實現(xiàn)的。FIFO 能夠抽離程序員的并行行為,使其專注于推理任務活動(調(diào)度)的“快照”時間。FIFO 能夠使并行化更易于實現(xiàn)。這主要得益于它減少了程序員實現(xiàn)并行化框架或容錯解決方案時,必須應付的可變空間。獨立內(nèi)核之間的 FIFO 展現(xiàn)出經(jīng)典的排隊行為。對于純串流系統(tǒng),可使用排隊或網(wǎng)絡(luò)流模型來對此行為進行建模。這種數(shù)據(jù)流類型網(wǎng)絡(luò)和串流最優(yōu)化的另一個主要優(yōu)勢在于它可按不同粒度級別來應用。程序員可以在每項任務內(nèi)部設(shè)計此類網(wǎng)絡(luò),也可以為任務或內(nèi)核系統(tǒng)設(shè)計此類網(wǎng)絡(luò)。實際上,您可以通過串流網(wǎng)絡(luò)來以分層方式例化并連接多個串流網(wǎng)絡(luò)或任務。支持更細粒度的并行化的另一項最優(yōu)化措施是流水打拍。
流水線范例
流水線是您日常生活中常用的概念。造車廠生產(chǎn)線就是一個典型的例子,其中每一項具體任務通常都是由一個獨立且唯一的工作站來完成的,如安裝引擎、安裝車門和安裝車輪。各工作站各自對一輛不同的車并行執(zhí)行自己的任務。當某一輛車執(zhí)行完某一項任務后,它就會移至下一個工作站。完成各項任務的時間差可通過“緩沖”(將一輛或多輛車暫存在各工作站之間的空間內(nèi))和/或“停滯”(暫時中止上游工作站的操作)來加以調(diào)整,直至下一個工作站變?yōu)榭捎脼橹埂?/p>
假設(shè)組裝一輛車需要執(zhí)行 3 項任務 A、B 和 C,這 3 項任務分別需要 20、10 和 30 分鐘。那么,如果全部 3 項任務均由單個工作站來執(zhí)行,工廠每 60 分鐘才能輸出一輛車。通過使用 3 個工作站組成的流水線,該工廠 60 分鐘即可輸出第一輛車,隨后每 30 分鐘再輸出一輛新車。正如此示例所示,流水線并不會降低時延,即單個項穿越整個系統(tǒng)的總時間。但它會增加系統(tǒng)吞吐量,即,第一個項完成后處理新的項的速率。
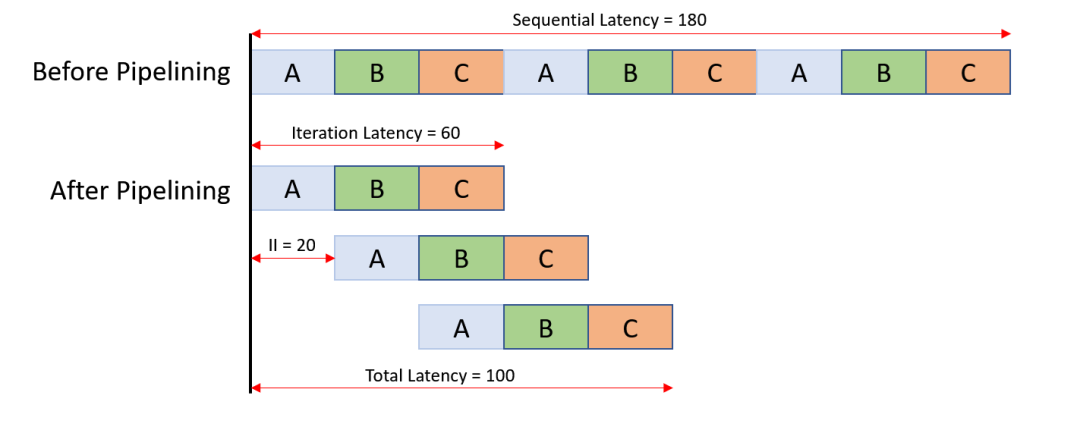
由于流水線的吞吐量不可能優(yōu)于其最慢的元素,因此程序員應嘗試在各階段間拆分工作和資源,以使各階段耗用相同時間來完成自己的任務。在上述車輛組裝線示例中,如果 3 項任務 A、B 和 C 各自耗時 20 分鐘,而不是分別耗時 20、10 和 30 分鐘,那么時延將仍為 60 分鐘,但每隔 20 分鐘(而不是 30 分鐘)即可完成一輛新車。下圖顯示了承擔制造 3 輛車任務的假想生產(chǎn)線示例。假定任務 A、B 和 C 各耗時 20 分鐘,那么順序生產(chǎn)線將需要 180 分鐘才能生產(chǎn) 3 輛車。而流水線式生產(chǎn)線只需 100 分鐘即可生產(chǎn) 3 輛車。
生產(chǎn)第一輛車所耗費的時間為 60 分鐘,稱為流水線的迭代時延。生產(chǎn)完第一輛車后,后兩輛車各自只需 20 分鐘,這稱為流水線的啟動時間間隔 (II)。生產(chǎn)三輛車所耗費的總時間為 100 分鐘,稱為流水線的總時延,即,總時延 = 迭代時延 + II * (項數(shù) - 1)。因此,改善 II 即可改善總時延,但不影響迭代時延。從程序員視角來看,流水線范例可適用于設(shè)計中的函數(shù)和循環(huán)。確定初始建立時間成本后,要實現(xiàn)理想吞吐量目標,II 應為 1,即初始建立時間延遲過后,在流水線的每個周期都將有輸出可用。在以上示例中,初始建立時間延遲 60 分鐘過后,每隔 20 分鐘就有一輛車可用。
圖 3. 流水打拍
流水打拍是經(jīng)典的微觀級別架構(gòu)最優(yōu)化,可應用于多個抽象層。在前文中,我們通過生產(chǎn)者使用者范例解釋了任務級別流水打拍。這一概念同樣適用于指令級別。這實際上是使生產(chǎn)者使用者流水線(和串流)保持填滿并繁忙的關(guān)鍵。僅當每個任務都高速率生產(chǎn)/使用數(shù)據(jù),故而需要指令級流水打拍 (ILP) 時,生產(chǎn)者使用者流水線才能保持高效。
由于流水打拍長期使用相同資源來執(zhí)行相同功能,因此需要有關(guān)每項任務時延的完整信息,故而被視作為靜態(tài)最優(yōu)化。有鑒于此,低級指令流水打拍方法無法應用于數(shù)據(jù)流類型的網(wǎng)絡(luò),因為在此類網(wǎng)絡(luò)中任務的時延是輸入數(shù)據(jù)的函數(shù),故而可能未知。下一章節(jié)中將詳解如何利用介紹的這三種基本范例來對不同類型的任務并行度進行建模。
組合三種范例
用戶程序中,大部分最優(yōu)化的主要焦點是函數(shù)和循環(huán)。現(xiàn)如今的最優(yōu)化工具通常在函數(shù)/過程級別工作。每個函數(shù)都能轉(zhuǎn)換為特定硬件組件。每個此類硬件組件都與類定義相似,該組件的許多對象(或?qū)嵗┚稍谧罱K硬件設(shè)計中創(chuàng)建和例化。每個硬件組件都將由許多更小的預定義組件組成,這些預定義組件通常用于實現(xiàn)基本函數(shù)(例如,加法、減法和乘法)。雖然不支持遞歸,但是函數(shù)可以調(diào)用其它函數(shù)。較小且調(diào)用次數(shù)較少的函數(shù)通常還可以內(nèi)聯(lián)到其調(diào)用方函數(shù)中,正如軟件函數(shù)內(nèi)聯(lián)方式一樣。在此情況下,實現(xiàn)函數(shù)所需的資源將匯總到調(diào)用方函數(shù)的組件中,這樣能更好地共享公用資源。將設(shè)計構(gòu)造為一組通信函數(shù)有助于在執(zhí)行這些函數(shù)時提升推斷并行度。
循環(huán)是程序中最重要的構(gòu)造之一。由于循環(huán)主體多次迭代,因此可輕松利用該屬性來提升并行度。可通過多種方式來對循環(huán)和循環(huán)嵌套進行變換(例如,流水打拍和展開),從而提升并行執(zhí)行的效率。這些變換使存儲器系統(tǒng)最優(yōu)化以及映射到多核和 SIMD 執(zhí)行資源成為可能。科學與工程應用中的許多程序都表現(xiàn)為對大型數(shù)據(jù)結(jié)構(gòu)進行各種運算。這些運算包括對陣列或矩陣進行簡單的逐元素運算,或者也可能是具有循環(huán)進位依賴關(guān)系的更復雜的循環(huán)嵌套運算,如跨循環(huán)迭代的數(shù)據(jù)依賴關(guān)系。此類數(shù)據(jù)依賴關(guān)系會影響循環(huán)內(nèi)可達成的并行度。在諸多此類情況下,必須對代碼進行重構(gòu),才能在現(xiàn)代化的并行平臺上有效執(zhí)行并行循環(huán)迭代。
下圖顯示了 4 個連續(xù)任務(即,C/C++ 函數(shù))A、B、C 和 D 的不同重疊執(zhí)行的簡單示例,其中,A 在 2 個不同陣列內(nèi)分別為 B 和 C 生成數(shù)據(jù),D 則使用來自 B 和 C 所生成的 2 個不同陣列的數(shù)據(jù)。假定這種“菱形”通信模式將運行 2 次,且 2 次運行彼此獨立。
?
void diamond(data_t vecIn[N], data_t vecOut[N]) { data_t c1[N], c2[N], c3[N], c4[N]; #pragma HLS dataflow A(vecIn, c1, c2); B(c1, c3); C(c2, c4); D(c3, c4, vecOut); }
?
以上代碼示例所示 C/C++ 源代碼片段顯示了這些函數(shù)的調(diào)用方式。請注意,任務 B 和 C 相互之間不存在數(shù)據(jù)依賴關(guān)系。下圖對應完全順序執(zhí)行方式,其中黑色圓圈表示用于實現(xiàn)串行的某種同步形式。
圖 4. 順序執(zhí)行 - 運行 2 輪

在菱形示例中,B 與 C 完全彼此獨立。兩者既不相互通信也不訪問任何共享存儲器資源,因此如果無需共享計算資源,那么兩者可并行執(zhí)行。由此可得結(jié)果如下圖所示,一輪運行內(nèi)形成了某種形式的分叉式連接并行運行。當 A 任務結(jié)束后,B 和 C 并行執(zhí)行,而 D 則等待 B 和 C,但下一輪仍按順序連續(xù)執(zhí)行。
圖 5. 一輪運行中的任務并行
此類執(zhí)行方式可總結(jié)為 (A; (B || C); D); (A; (B || C); D),其中“;”表示串行連續(xù),“||”則表示完全并行。這種形式的嵌套分叉連接并行運行對應于一種從屬任務子類,稱為串并行任務圖。一般來說,任何從屬任務的有向無環(huán)圖 (DAG) 均可通過獨立的分叉并連接類型同步來實現(xiàn)。此外同樣值得注意的是,這正是在具有多個線程并使用共享存儲器的 CPU 上運行多線程程序的方式。
在 FPGA 上,您可以探索其它可用的并行形式。先前的執(zhí)行模式利用的是在單次調(diào)用內(nèi)執(zhí)行任務級別并行操作。那么重疊連續(xù)運行又會如何呢?如果每次運行之間真正彼此獨立,但每個函數(shù)(即,A、B、C 或 D)復用前一輪的相同計算硬件,那么我們?nèi)钥赡芟胍獙?A 的第二次調(diào)用與 B 和 C 的第一次調(diào)用并行執(zhí)行。這是一種跨調(diào)用的任務級流水線形式,由此可得結(jié)果如下圖所示。現(xiàn)在,由于吞吐量受到所有任務間的最大時延的限制,而非所有任務時延總和的限制,因而吞吐量明顯改善。雖然每輪運行的時延不變,但多輪運行的總時延得以縮短。
圖 6. 利用流水打拍實現(xiàn)任務并行
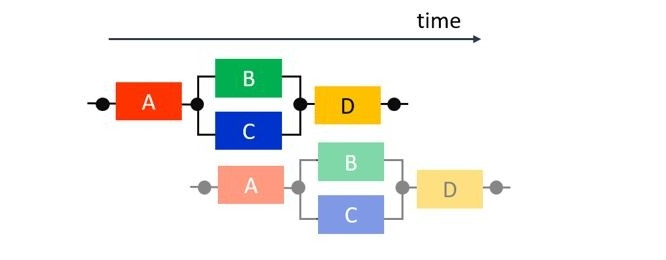
但現(xiàn)在,當 B 首次運行從存儲器中執(zhí)行讀取時,A 則已得到其首輪運行的結(jié)果,A 的第二輪操作可能已在相同存儲器內(nèi)執(zhí)行寫入。為避免在使用數(shù)據(jù)之前寫入數(shù)據(jù),您可以依靠某種形式的存儲器擴展(即所謂的雙重緩沖或 PIPO)來達成此交織操作。這種交織操作以任務間的黑色圓圈來表示。
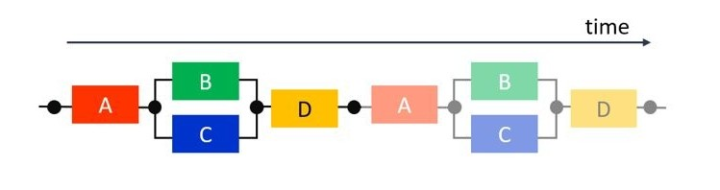
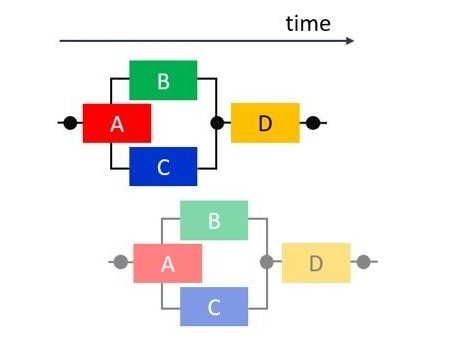
有一種有效的方法可用于提升吞吐量和復用計算資源,即對運算符、循環(huán)和/或函數(shù)進行流水打拍。如果每個任務現(xiàn)在都能與自身重疊,您即可在一輪運行內(nèi)實現(xiàn)任務并行操作,同時跨多輪運行實現(xiàn)任務流水打拍,這兩者都屬于宏觀級別并行度的例證。多任務內(nèi)流水打拍則是微觀級別并行度的例證。現(xiàn)在,由于每一輪運行依賴于任務間的最小吞吐量而不是任務的最大吞吐量,因此每一輪的總體吞吐量得以進一步提升。最后,根據(jù)通信數(shù)據(jù)的同步方式,僅當生成全部數(shù)據(jù) (PIPO) 或者以逐元素方式 (FIFO) 生成全部數(shù)據(jù)后,才有可能在一輪運行內(nèi)出現(xiàn)某種程度的額外重疊。例如,在下圖中,B 和 C 都比 A 更早啟動并以流水打拍方式執(zhí)行,而 D 則假定仍必須等待 B 和 C 完成。這是最后一種類型的單輪運行內(nèi)重疊,當 A 通過 FIFO 串流訪問(表現(xiàn)為不含圓圈的直線)來與 B 和 C 通信時,才能實現(xiàn)這種方式的重疊。同樣,D 也能與 B 和 C 重疊,前提是采用的通道為 FIFO 而不是 PIPO。但不同于前幾種執(zhí)行模式,使用 FIFO 可能導致死鎖,因此需要正確設(shè)置這些串流 FIFO 的大小。
圖 7. 單輪運行內(nèi)的任務并行和流水打拍、多輪運行的流水打拍以及單一任務內(nèi)的流水打拍
總之,本節(jié)中所演示的三種范例為您展示了如何在避免多線程和/或并行編程語言的復雜操作的同時下,仍能在設(shè)計中實現(xiàn)并行操作。生產(chǎn)者使用者范例搭配串流通道即可輕松組合小型系統(tǒng)與大型系統(tǒng)在內(nèi)的各種系統(tǒng)。如上文所述,串流接口支持輕松耦合并行任務,亦或是分層數(shù)據(jù)流網(wǎng)絡(luò)也不在話下。這其中部分原因是由于編程語言 (C/C++) 能夠靈活支持此類規(guī)范,并且還有各種工具可用于在當今 FPGA 器件上可用的異構(gòu)計算平臺上實現(xiàn)這些規(guī)范。
結(jié)論 - 性能良方
本文檔中所演示的設(shè)計概念具有一個主要的核心原則,即并行計算模型傾向于通過狀態(tài)封裝和模塊化單元或任務內(nèi)的順序執(zhí)行來為并行編程提供更簡單的編程模型。隨后,任務將與串流相連(以執(zhí)行同步和通信)。每個串流均可包含不同類型的通道,例如,F(xiàn)IFO 或 PIPO。您不妨思考下為什么這種范例未能推而廣之。現(xiàn)如今的變化在于,每個人手中所使用的并行硬件數(shù)量發(fā)生了巨大變化。即使手機都是多核的,并擁有異構(gòu)加速器(GPU 等)。利用大部分現(xiàn)有編程工具對這些器件進行編程都無疑是一場夢魘。將 OpenCL 、C、Java 和/或 C++ 的位相結(jié)合來打造一致的系統(tǒng)極為耗時。而基于串流的處理方式則可為此提供一種解決方案。狀態(tài)/邏輯區(qū)隔化使工具(例如編譯器和調(diào)度器)能夠更加輕松地理清何時何地需要運行應用的哪些部分。基于串流的處理方式日漸流行的另一個原因是,它打破了傳統(tǒng)多線程“分叉/連接”模型基于并行執(zhí)行的觀點。通過啟用任務級流水打拍和指令級流水打拍,運行時間可執(zhí)行的并發(fā)操作數(shù)量遠遠超過了分叉/連接模型現(xiàn)今所能執(zhí)行的操作數(shù)量。這種附加的并行性對于充分利用現(xiàn)今 FPGA 器件上可用的硬件而言至關(guān)重要。與啟用流水線并行性如出一轍的是,串流同樣支持設(shè)計師構(gòu)建并行應用,而無需擔心鎖定、爭用條件等可能導致并行編程無從著手的問題。
最后,建議您依據(jù)以下高層次操作檢查表為標準,在可重配置 FPGA 平臺上實現(xiàn)所期望的性能。
專為 CPU 編寫的軟件與專為 FPGA 編寫的軟件有著本質(zhì)上的不同。要想編寫可在 CPU 平臺與 FPGA 平臺之間進行移植的代碼,性能犧牲是不可避免的。因此,F(xiàn)PGA 軟件與 CPU 軟件的編寫方式差異巨大,與其抗拒這個事實,不如坦然接受。
從工程伊始,就應該建立起能夠?qū)υ创a更改進行功能性驗證的流程。基于參考模型或者使用黃金矢量來測試軟件是極為常用的實踐。
首先專注于設(shè)計的宏架構(gòu)。并考慮使用生產(chǎn)者使用者范例來對解決方案進行建模。
明確設(shè)計的宏架構(gòu)后,即可繪制出期望的活動時間線,其中以橫軸表示時間,并顯示您期望在多次迭代(或調(diào)用)過程中執(zhí)行每一項功能相對于其它功能的時間。這樣您將能夠?qū)υO(shè)計中期望的并行性了然于胸,后續(xù)即可用于與最終達成的結(jié)果進行比較。HLS GUI 通常可用于直觀顯示所達成的并行度。
僅當您已掌握宏架構(gòu)并確立活動時間線之后,再開始進行程序編碼或重構(gòu)。
一般,HLS 編譯器僅根據(jù)函數(shù)調(diào)用來推斷任務級別并行度。因此,需要在硬件中并發(fā)運行的順序代碼塊(例如循環(huán))應置于專用函數(shù)內(nèi)。
將原始算法分解/分區(qū)為較小的組件,這些組件可通過串流來彼此進行通信。這樣您就能在一定程度上掌握數(shù)據(jù)在設(shè)計中流動的方式。
較小的模塊化組件的優(yōu)勢在于,可以按需進行賦值,從而提升并行性。
請避免通信通道的位寬過寬。將此類寬通道分解為較窄些的通道,這樣有助于在 FPGA 器件上實現(xiàn)。
大型函數(shù)(手寫或通過內(nèi)聯(lián)較小的函數(shù)生成)可能包含重要路徑,工具可能難以處理此類路徑。具有更簡單的控制路徑的小型函數(shù)有助于 FPGA 器件上的實現(xiàn)。
目標是在每個函數(shù)內(nèi)包含單個循環(huán)嵌套(可采用 HLS 工具可推斷的固定循環(huán)邊界,或者手動向 HLS 工具提供循環(huán)次數(shù)信息)。這樣可以顯著促進吞吐量的測量和最優(yōu)化。此方法雖然可能不適用于所有設(shè)計,但對于大部分案例都很有效。
吞吐量 - 縱觀全局,掌握設(shè)計每個階段期間所需的處理速率,這一點至關(guān)重要。這將影響您為 FPGA 編寫應用的方式。
思考設(shè)計中的關(guān)鍵路徑(即,關(guān)鍵任務級別路徑,如,ABD 或 ACD),調(diào)查此關(guān)鍵路徑中哪個部分可能成為瓶頸。通過設(shè)計仿真,觀察哪幾個任務采用流水打拍,以及任一路徑的不同分支是否在吞吐量方面存在不一致。隨后,可使用 HLS GUI 工具和/或仿真波形查看器來直觀顯示此類吞吐量問題。
基于串流的通信允許使用者在生產(chǎn)者開始生產(chǎn)時立即開始處理,由此即可支持重疊執(zhí)行(從而提升并行性和吞吐量)。
為了使生產(chǎn)者和使用者任務保持持續(xù)不間斷運行,請使用流水打拍和調(diào)整串流的相應大小等方法來對每項任務的執(zhí)行進行最優(yōu)化,使其能盡快運行。
請思考串流通道的同步粒度(和開銷)。您可使用 PIPO 通道來重疊任務執(zhí)行,而無需擔心死鎖,顯式手動串流 FIFO 通道支持您(比 PIPO)更快開始重疊執(zhí)行,但請謹慎處理 FIFO 大小調(diào)整,以避免死鎖。
了解有關(guān)可綜合的 C/C++ 編碼樣式的更多信息.
使用 HLS 編譯器生成的報告作為指導來完成最優(yōu)化進程。
請將上述檢查表放在附近,以便隨時參考。它總結(jié)了構(gòu)建能滿足您的性能目標的設(shè)計所需的整個設(shè)計活動。
設(shè)計的另一個需要考量的重要方面在于您的加速函數(shù)或內(nèi)核。內(nèi)核連接外部的接口是最終系統(tǒng)設(shè)計的重要要素。您的內(nèi)核可能需要插入更大的設(shè)計或者與更大的內(nèi)核系統(tǒng)中的其它內(nèi)核進行通信,或者與系統(tǒng)外部的存儲器或器件進行通信。設(shè)計高效內(nèi)核?提供了另一份檢查表,以供您在設(shè)計加速內(nèi)核的外部接口時考量其中所列出的各項內(nèi)容。
審核編輯:湯梓紅













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論