我們?yōu)榱?b class="flag-6" style="color: red">實(shí)現(xiàn)動(dòng)態(tài)圖像的濾波算法,用串口發(fā)送圖像數(shù)據(jù)到FPGA開發(fā)板,經(jīng)FPGA進(jìn)行圖像處理算法后,動(dòng)態(tài)顯示到VGA顯示屏上,前面我們把硬件平臺(tái)已經(jīng)搭建完成了,后面我們將利用這個(gè)硬件基礎(chǔ)平臺(tái)
2019-01-02 16:26:23 4706
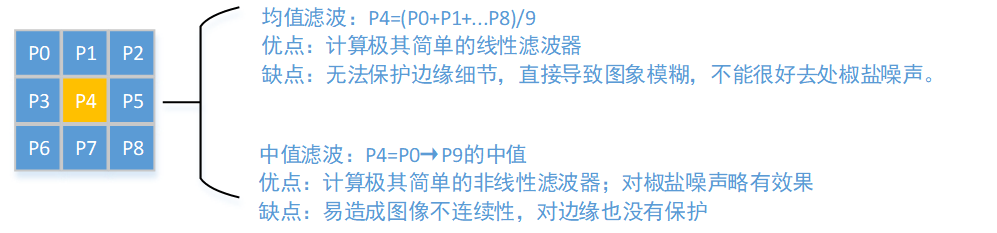
4706 首先要做的是最簡(jiǎn)單的均值濾波算法。均值濾波是典型的線性濾波算法,它是指在圖像上對(duì)目標(biāo)像素給一個(gè)模板,該模板包括了其周圍的臨近像素(以目標(biāo)象素為中心的周圍 8 個(gè)像素,構(gòu)成一個(gè)濾波模板,即去掉目標(biāo)像素本身),再用模板中的全體像素的平均值來代替原來像素值。
2023-10-16 09:23:26512 
`采集的信號(hào),采樣頻率1000,采用圖中進(jìn)行求均值,問題在于求均值后保存的數(shù)據(jù)每秒只有1,而不是采樣頻率1000,誰(shuí)給指點(diǎn)下?沒找到信號(hào)的均值濾波器。`
2015-01-28 11:16:34
求均值濾波和中值濾波的實(shí)現(xiàn)代碼,不要直接調(diào)用函數(shù)實(shí)現(xiàn)的,要用平移循環(huán)的代碼,,均值濾波包括四領(lǐng)域濾波和八領(lǐng)域濾波,,跪求給為大神了,,,
2016-04-19 17:00:17
求教各位大神采集的多路信號(hào)怎么每100個(gè)數(shù)取平均再顯示,也就是用均值濾波讓信號(hào)更加平穩(wěn)
2014-11-24 09:03:49
收集的關(guān)于基礎(chǔ)濾波算法:理論上講單片機(jī)從A/D芯片上采集的信號(hào)就是需要的量化信號(hào),但是由于存在電路的相互干擾、電源噪聲干擾和電磁干擾,在A/D芯片的模擬輸入信號(hào)上會(huì)疊加周期或者非周期的干擾信號(hào),并會(huì)
2019-04-30 03:43:28
什么是K-均值聚類法?K均值聚類算法的MATLAB怎么實(shí)現(xiàn)?
2021-06-10 10:01:25
我采用串口通訊進(jìn)行數(shù)據(jù)的傳輸,對(duì)采集到的數(shù)據(jù)想實(shí)現(xiàn)平均值,例如每采集到100個(gè)數(shù)就求他們的平均值,并顯示出來,再采集100數(shù)求平均,要怎么實(shí)現(xiàn)呢???請(qǐng)大家?guī)蛡€(gè)忙!!我試著用FOR循環(huán)實(shí)現(xiàn),但是每次循環(huán)完后,寄存器的數(shù)據(jù)不能清零,倒置數(shù)據(jù)一直累加,該怎么解決呢,求大師幫忙。
2012-09-10 21:18:24
在labview中,用什么濾波器去掉高斯白噪聲的效果最好?想用均值濾波但是找不到
2018-04-30 16:31:43
`OpenCV提供了五種常用的圖像平滑處理操作方法,且分別被封裝在單獨(dú)的函數(shù)中,使用起來非常方便:方框濾波——boxblur函數(shù)均值濾波——blur函數(shù)高斯濾波——GaussianBlur函數(shù)中值
2016-09-11 13:12:55
labview對(duì)1000個(gè)數(shù)進(jìn)行中值濾波,濾波后首尾端不是均值,怎么辦
2015-02-02 17:18:48
本例程基本的功能實(shí)現(xiàn)和10.1節(jié)的例程一樣,只是在原先的“脈沖計(jì)數(shù)”和“數(shù)碼管顯示驅(qū)動(dòng)”兩個(gè)功能塊之間,增加了“均值濾波處理”功能的實(shí)現(xiàn)。本實(shí)例功能框圖如圖10.4所示。圖10.4 超聲波測(cè)距實(shí)例
2018-09-18 20:24:03
運(yùn)算,盡管單片機(jī)并不擅長(zhǎng)實(shí)現(xiàn)算法和進(jìn)行復(fù)雜的運(yùn)算。下面主要是介紹如何用單片機(jī)實(shí)現(xiàn)數(shù)字濾波。在單片機(jī)進(jìn)行數(shù)據(jù)采集時(shí),會(huì)遇到數(shù)據(jù)的隨機(jī)誤差,隨機(jī)誤差是由隨機(jī)干擾引起的,其特點(diǎn)是在相同條件下測(cè)量同一量時(shí),其大小
2018-01-28 14:08:41
單片機(jī)主要作用是控制外圍的器件,并實(shí)現(xiàn)一定的通信和數(shù)據(jù)處理。但在某些特定場(chǎng)合,不可避免地要用到數(shù)學(xué)運(yùn)算,盡管單片機(jī)并不擅長(zhǎng)實(shí)現(xiàn)算法和進(jìn)行復(fù)雜的運(yùn)算。下面主要是介紹如何用單片機(jī)實(shí)現(xiàn)數(shù)字濾波。在單片機(jī)
2019-09-20 08:00:00
運(yùn)算,盡管單片機(jī)并不擅長(zhǎng)實(shí)現(xiàn)算法和進(jìn)行復(fù)雜的運(yùn)算。下面主要是介紹如何用單片機(jī)實(shí)現(xiàn)數(shù)字濾波。在單片機(jī)進(jìn)行數(shù)據(jù)采集時(shí),會(huì)遇到數(shù)據(jù)的隨機(jī)誤差,隨機(jī)誤差是由隨機(jī)干擾引起的,其特點(diǎn)是在相同條件下測(cè)量同一量時(shí),其
2018-10-30 17:44:58
卡爾曼濾波算法對(duì)比其他的濾波算法有什么優(yōu)點(diǎn)
2023-10-11 06:42:24
最近用Arduino做電子秤,為了解決數(shù)據(jù)的跳變研究了不少濾波算法。網(wǎng)上能找到大把的十大濾波算法帖子,每一篇都不太一樣,都號(hào)稱精編啊,除錯(cuò)啊什么的,可是放到板子里卻沒一個(gè)能正常跑起來的。于是決定自己
2016-06-16 10:51:40
處理器讀取陀螺儀加速度計(jì)數(shù)據(jù)后首先需要對(duì)數(shù)據(jù)進(jìn)行濾波處理,此文分析比較幾種常用的濾波算法。IMU: IMU使用MPU9250(即MPU6500),設(shè)置加速度量程±8G,陀螺儀±2000dps,數(shù)字低
2019-06-11 08:00:00
` 本帖最后由 ninghechuan 于 2017-8-30 08:20 編輯
我們?yōu)榱?b class="flag-6" style="color: red">實(shí)現(xiàn)動(dòng)態(tài)圖像的濾波算法,用串口發(fā)送圖像數(shù)據(jù)到FPGA開發(fā)板,經(jīng)FPGA進(jìn)行圖像處理算法后,動(dòng)態(tài)顯示到
2017-08-28 11:34:10
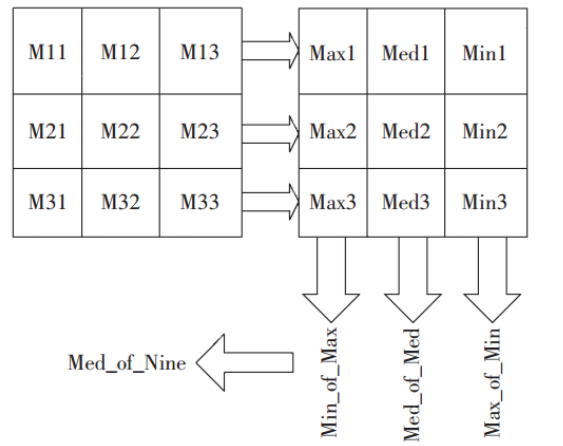
的中值。排序算法思想中值濾波的3x3矩陣的生成和均值濾波是完全類似的。我們求中值的方法是,先對(duì)3x3矩陣的每行按從大到小進(jìn)行排序,然后利用排序法求出最大值那一列的最小值,求出之間數(shù)那一列的中間值,求出
2017-09-01 07:04:36
使用Weka進(jìn)行K-近鄰算法和K-均值算法的使用
2019-05-24 12:02:15
單片機(jī)主要作用是控制外圍的器件,并實(shí)現(xiàn)一定的通信和數(shù)據(jù)處理。但在某些特定場(chǎng)合,不可避免地要用到數(shù)學(xué)運(yùn)算,盡管單片機(jī)并不擅長(zhǎng)實(shí)現(xiàn)算法和進(jìn)行復(fù)雜的運(yùn)算。下面主要是介紹如何用單片機(jī)實(shí)現(xiàn)數(shù)字濾波。
在單片機(jī)
2023-11-30 18:39:25
如何實(shí)現(xiàn)基于四階累積量的自適應(yīng)均值濾波算法?基于四階累積量的自適應(yīng)均值濾波包括哪幾個(gè)過程?基于四階累積量的自適應(yīng)均值濾波具有更好的濾波性能的原因是什么?
2021-04-14 06:17:11
文章目錄概述平均值濾波中值濾波一階滯后濾波防抖濾波限幅濾波概述??這是我們?cè)谧銮度胧杰浖_發(fā)處理數(shù)據(jù)時(shí)常用且簡(jiǎn)單的一些濾波算法,包括平均值濾波、中值濾波,一階滯后濾波,防抖濾波,限幅濾波等。平均值
2021-12-15 09:09:23
在上一篇文章單片機(jī)ADC采樣算法---平均值采樣法中分析了平均值采樣法的使用,上篇文章中的平均值采樣法是連續(xù)采樣100個(gè)數(shù)據(jù),然后求平均值,這種方法存在一個(gè)問題,就是采集100個(gè)值之后,下一次又重新
2022-01-11 07:58:08
請(qǐng)問一下pwm+低通濾波器是怎么來實(shí)現(xiàn)的?怎樣通過無(wú)源低通濾波器來取得占空比可調(diào)方波的平均值,謝謝
2023-03-15 11:27:29
急求 局部均值分解 MATLAB程序請(qǐng)高手幫忙
2012-12-29 20:24:13
圖上是adc采集多組原始數(shù)據(jù)的平均值,隨著溫度漸變也會(huì)上下波動(dòng),有什么現(xiàn)成的濾波算法來消除波動(dòng)呢?ADC采集溫度用什么濾波算法呢
2022-07-27 10:23:41
單片機(jī)在模擬電路中使用的時(shí)候,經(jīng)常需要用到AD功能,而通過單片機(jī)ADC采集回來的數(shù)據(jù)往往不能直接使用,在不同場(chǎng)合下需要對(duì)采集到的數(shù)據(jù)要通過不同的算法對(duì)數(shù)據(jù)進(jìn)行處理,先來看看最簡(jiǎn)單的平均值采樣法
2021-11-23 09:08:25
小弟最近需要學(xué)習(xí)一種關(guān)于灰度圖像去噪的改進(jìn)算法,它需要在原始的中值濾波或者均值濾波器上加以改進(jìn),達(dá)到這樣的要求:1.判斷圖像中哪些點(diǎn)是受污染的點(diǎn)2.若受污染,則用簡(jiǎn)單的中值/均值濾波算法處理3.若未受污染,則保持原樣勞煩哪位可以幫幫忙提供給小弟一份這樣的matlab程序,感激不盡
2013-03-30 17:06:32
:C:\ti\controlSUITE\libs\dsp\FPU\v120\examples_ccsv4\2833x_FIR)中的濾波算法做了電流環(huán)電流采集的濾波,從ADC讀取的數(shù)據(jù)轉(zhuǎn)換后的約為
2018-06-13 00:27:36
最近用Arduino做電子秤,為了解決數(shù)據(jù)的跳變研究了不少濾波算法。網(wǎng)上能找到大把的十大濾波算法帖子,每一篇都不太一樣,都號(hào)稱精編啊,除錯(cuò)啊什么的,可是放到板子里卻沒一個(gè)能正常跑起來的。于是決定自己
2016-07-28 11:08:00
軟件算法實(shí)現(xiàn)數(shù)字濾波問題:解決方法:數(shù)字濾波算法優(yōu)點(diǎn):限幅濾波算法:原理描述:適用場(chǎng)景:參考代碼:中值濾波算法:原理描述:適用場(chǎng)景:參考代碼:算術(shù)平均濾波算法:原理描述:適用場(chǎng)景:參考代碼:加權(quán)平均
2022-01-20 06:58:14
,從誤差均方差上看,UKF 優(yōu)于EKF,這也是由于EKF是將非線性化的系統(tǒng)線性化造成的偏差,而UKF 是基于樣本點(diǎn)的濾波方式,對(duì)噪聲的適應(yīng)性更強(qiáng)。 5 結(jié)語(yǔ) 本文研究EKF 和UKF 算法在四軸飛行器
2015-12-31 10:53:54
傳統(tǒng)K均值算法對(duì)初始聚類中心敏感,聚類結(jié)果隨不同的初始輸入而波動(dòng),容易陷入局部最優(yōu)值。針對(duì)上述問題,該文提出一種基于遺傳算法的K均值聚類算法,將K均值算法的局部尋
2009-04-13 09:59:22 22
22 K-均值算法是一種基于樣本間相似性度量的間接聚類方法。本文研究和探索K-均值方法在巖相識(shí)別中的應(yīng)用。在求樣本間的距離時(shí),采用馬氏(Mahalanobis)距離代替歐氏距離。關(guān)鍵詞
2009-07-08 08:56:565 通過比較入侵檢測(cè)和人工免疫兩個(gè)系統(tǒng)間的相似性,提出了一種基于人工免疫原理的入侵檢測(cè)系統(tǒng)模型。運(yùn)用K均值算法對(duì)人工免疫系統(tǒng)中的抗原和抗體進(jìn)行聚類,對(duì)該算法進(jìn)行了
2009-08-04 09:33:0018 本文介紹了一種不使用濾波器的諧波電流檢測(cè)方法——電流平均值法,給出了在Simulink 環(huán)境下相應(yīng)仿真模型的建立方法,并對(duì)其進(jìn)行了仿真研究。結(jié)果不僅表明電流平均值檢測(cè)法比
2009-08-05 10:21:0926 針對(duì)CRM 客戶分類,提出模擬退火算法與K 均值算法相結(jié)合的聚類算法。利用模擬退火算法全局尋優(yōu)能力改變k 均值算法易陷入局部極值的缺點(diǎn)。經(jīng)標(biāo)準(zhǔn)數(shù)據(jù)集檢驗(yàn),證明算法有效
2009-09-15 16:16:378 針對(duì)模糊C-均值(FCM)算法不能很好地處理更新數(shù)據(jù)的缺點(diǎn),提出基于FCM 的自適應(yīng)增量式聚類算法AIFCM。該算法結(jié)合密度和集合的思想,給出一種自動(dòng)確定聚類初始中心的方法,能在
2009-10-04 14:09:0911 中值濾波是一種有效抑制鹽椒噪聲的濾波算法,但它最大的缺點(diǎn)是模糊了細(xì)節(jié)。本文提出一種基于中值的加權(quán)均值濾波算法,并將該方法應(yīng)用于玻璃瓶瓶口檢測(cè)中。實(shí)驗(yàn)結(jié)果表明
2009-12-12 13:19:0211 僅用單一的顏色特征進(jìn)行跟蹤是大多數(shù)跟蹤算法魯棒性不高的主要原因。針對(duì)此問題,該文提出一種多特征融合跟蹤算法。該算法利用顏色和紋理特征表示目標(biāo),通過均值遷移和粒
2010-02-09 11:39:3719 該文針對(duì)K 均值聚類算法存在的缺點(diǎn),提出一種改進(jìn)的粒子群優(yōu)化(PSO)和K 均值混合聚類算法。該算法在運(yùn)行過程中通過引入小概率隨機(jī)變異操作增強(qiáng)種群的多樣性,提高了混合聚類
2010-02-09 14:21:2610 介紹了一種改進(jìn)型K均值算法,以及該算法在提花毛皮花型自動(dòng)識(shí)別中的應(yīng)用。詳細(xì)敘述了算法的實(shí)現(xiàn)步驟,通過實(shí)驗(yàn)證明該算法能有效地實(shí)現(xiàn)提花毛皮花型的自動(dòng)識(shí)別。
2010-02-23 14:10:1011
全波整流器與均值濾波器電路圖
2009-03-28 09:21:511113 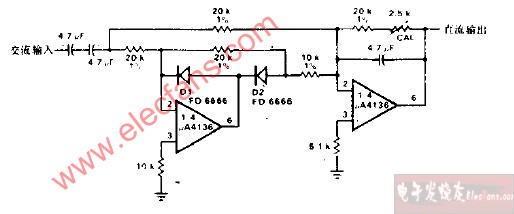
什么是平均值? 平均值是什么意思?
交變電流的平均值是指在某段時(shí)間內(nèi)流過電路的總電荷與該段時(shí)間的比值。正弦量
2009-04-17 10:31:339945 全波整流器和平均值濾波器:The Full-Wave Rectifier and Averaging Filter
The circuit shown in Figure 25 is the heart of an avera
2009-05-16 16:20:061550 
全波整流取平均值濾波器
輸入信號(hào)由D1、D2和運(yùn)算
2009-09-17 15:28:181366 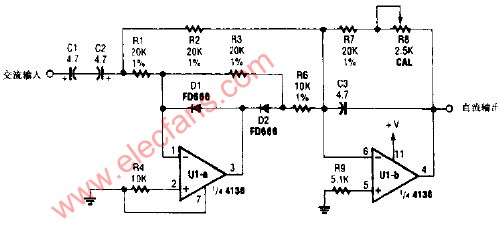
整流器和平均值濾波器電路
如圖所示,是一個(gè)平均值輸出,有效值刻度的交流電壓表頭放大電路。它由一個(gè)整流器和一個(gè)平均值濾波
2009-12-07 12:10:532121 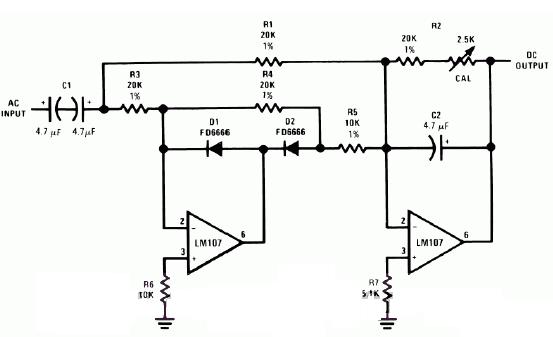
針對(duì)自標(biāo)定加速度計(jì)組合動(dòng)基座試驗(yàn)數(shù)據(jù)中存在的數(shù)據(jù)異常問題,推導(dǎo)并運(yùn)用自適應(yīng)Kalman濾波算法剔除異常數(shù)據(jù),通過對(duì)不同Kalman濾波算法自標(biāo)定精度解算結(jié)果的均值和標(biāo)準(zhǔn)差進(jìn)行比較
2011-04-12 17:08:510 傳統(tǒng)無(wú)線傳感網(wǎng)一般由大量密集的傳感器節(jié)點(diǎn)構(gòu)成,存在節(jié)點(diǎn)計(jì)算能力、能源和帶寬都非常有限的缺點(diǎn),為了有效節(jié)能、延長(zhǎng)網(wǎng)絡(luò)壽命,介紹了基于聚類的K均值算法。該算法通過生成的
2011-04-12 18:16:5449 根據(jù)椒鹽噪聲污染圖像灰度值取值范圍的變化,提出了一種改進(jìn)的加權(quán)均值濾波算法。實(shí)驗(yàn)結(jié)果表明,該方法能有效地去除椒鹽噪聲,同時(shí)保留了圖像細(xì)節(jié)。
2011-05-16 17:37:1249 針對(duì)數(shù)據(jù)在性態(tài)和類屬方面存在不確定性的特點(diǎn),提出一種基于模糊C 均值聚類的數(shù)據(jù)流入侵檢測(cè)算法,該算法首先利用增量聚類得到網(wǎng)絡(luò)數(shù)據(jù)的概要信息和類數(shù),然后利用模糊C均值聚
2012-03-20 10:29:2135 模糊C-均值聚類算法是一種無(wú)監(jiān)督圖像分割技術(shù),但存在著初始隸屬度矩陣隨機(jī)選取的影響,可能收斂到局部最優(yōu)解的缺點(diǎn)。提出了一種粒子群優(yōu)化與模糊C-均值聚類相結(jié)合的圖像分割算
2012-10-16 16:07:0621 文中提出了一種基于均值量化的小波域自同步數(shù)字音頻水印算法。該算法是一種盲水印算法,水印提取不需要原始音頻信號(hào)的參與。算法設(shè)計(jì)中運(yùn)用了均值量化的策略,音頻信號(hào)小波分
2012-10-26 15:09:4721 MATLAB中關(guān)于圖像處理的算法,其中有關(guān)于中值、均值、維納各種濾波代碼的源程序;真的不錯(cuò),可以下載。
2016-04-15 11:17:399 輸入數(shù)據(jù)中排除最大最小值后求平均值的算法,測(cè)試通過。
2016-08-18 18:24:0111 基于K均值的軟件測(cè)試集用例約簡(jiǎn)算法研究_高丑光
2017-01-07 18:39:170 鄰域信息熵的核模糊C均值聚類圖像分割算法
2017-01-07 20:49:270 特征加權(quán)和優(yōu)化劃分的模糊C均值聚類算法_肖林云
2017-01-07 21:39:440 在前一個(gè)博客中已經(jīng)對(duì)機(jī)器視覺及粒子濾波算法的相關(guān)原理進(jìn)行了介紹,在基于410c平臺(tái)實(shí)現(xiàn)粒子濾波算法的前期,我們?cè)谏衔粰C(jī)上應(yīng)用QT和Opencv完成了粒子濾波算法的實(shí)現(xiàn)和測(cè)試,具體的實(shí)現(xiàn)及測(cè)試過程如下:
2017-02-21 09:53:473587 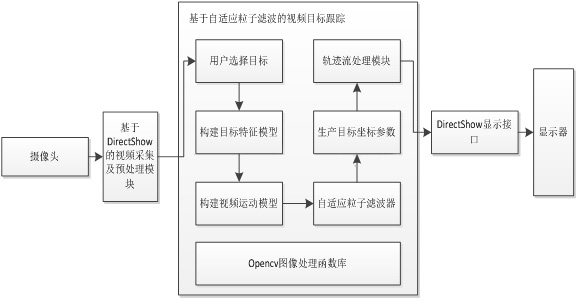
基于加速k均值的譜聚類圖像分割算法改進(jìn)_李昌興
2017-03-19 19:25:560 鑒于主元分析法的降維特性和模糊C均值聚類算法良好的分類性能,本文在丙烯睛反應(yīng)器操作參數(shù)的優(yōu)化中,結(jié)合這兩種方法,將主元分析處理后的數(shù)據(jù)作為新的樣本輸入,利用模糊C均值聚類算法進(jìn)行優(yōu)化操作。
2017-09-08 15:48:039 為了提高WSN節(jié)點(diǎn)定位精度,針對(duì)測(cè)距誤差對(duì)定位結(jié)果的影響,提出基于模糊C均值聚類的定位算法。算法首先利用多邊定位算法得到若干個(gè)定位結(jié)果,利用模糊C均值聚類算法對(duì)定位結(jié)果進(jìn)行聚類分析,然后,根據(jù)
2017-11-09 17:47:1310 -濾波算法是一種高效濾波算法,常用于對(duì)勻速直線運(yùn)動(dòng)的跟蹤。為了解決船用ARPA雷達(dá)追蹤定位實(shí)時(shí)性和準(zhǔn)確性的矛盾,提出使用-濾波算法對(duì)目標(biāo)航跡進(jìn)行濾波。在確保精度要求的同時(shí),能夠快速定位目標(biāo),并計(jì)算
2017-11-14 11:43:343 的使用,同時(shí)以整數(shù)數(shù)據(jù)處理方式實(shí)現(xiàn)了向?qū)?b class="flag-6" style="color: red">濾波器中方差和變換系數(shù)的計(jì)算,并且通過參數(shù)調(diào)整,可以方便地實(shí)現(xiàn)不同大小圖像的不同尺寸窗口的向?qū)?b class="flag-6" style="color: red">濾波。在Altera公司Cyclone系列FPGA芯片上進(jìn)行了綜合,實(shí)驗(yàn)結(jié)果表明,向?qū)?b class="flag-6" style="color: red">濾波整數(shù)FPGA結(jié)構(gòu)的處理結(jié)果與
2017-11-22 15:43:1212 保證粒子的多樣性,有效避免陷入局部收斂。對(duì)采用CVaR度量風(fēng)險(xiǎn)、構(gòu)建有交易費(fèi)用和限制證券比例的均值CVaR投資組合模型進(jìn)行仿真實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果驗(yàn)證了算法的有效性。將改進(jìn)的粒子群算法應(yīng)用到求解均值CVaR模型的投資組合問題,與其他
2017-11-25 11:49:100 針對(duì)傳統(tǒng)圖轉(zhuǎn)導(dǎo)( GT)算法計(jì)算量大并且準(zhǔn)確率不高的問題,提出一個(gè)基于C均值聚類和圖轉(zhuǎn)導(dǎo)的半監(jiān)督分類算法。首先,采用模糊C均值(FCM)聚類算法先對(duì)未標(biāo)記樣本預(yù)選取,縮小圖轉(zhuǎn)導(dǎo)算法構(gòu)圖數(shù)據(jù)集的范圍
2017-11-28 16:36:120 針對(duì)濾波器組多載波/正交幅度調(diào)制(FBMC-OQAM)系統(tǒng)中,功率峰均值比(PAPR)過高且傳統(tǒng)抑制方法復(fù)雜度過高難以實(shí)現(xiàn)的問題,提出了一種應(yīng)用在FBMC-OQAM系統(tǒng)中的新的抑制方法。首先,在傳統(tǒng)
2017-11-28 17:21:480 針對(duì)傳統(tǒng)非局部均值(NLM)算法的濾波參數(shù)非自適應(yīng)及去噪后邊緣易模糊的缺點(diǎn),提出一種基于圖像分割的非局部均值去噪算法。該算法分為兩個(gè)階段:第一階段根據(jù)噪聲大小及圖像紋理自適應(yīng)確定濾波參數(shù)的值,并采用
2017-11-30 14:19:301 K-means算法是最簡(jiǎn)單的一種聚類算法。算法的目的是使各個(gè)樣本與所在類均值的誤差平方和達(dá)到最小(這也是評(píng)價(jià)K-means算法最后聚類效果的評(píng)價(jià)標(biāo)準(zhǔn))
2017-12-01 14:07:3319658 
傳統(tǒng)的核聚類僅考慮了類內(nèi)元素的關(guān)系而忽略了類間的關(guān)系,對(duì)邊界模糊或邊界存在噪聲點(diǎn)的數(shù)據(jù)集進(jìn)行聚類分析時(shí),會(huì)造成邊界點(diǎn)的誤分問題。為解決上述問題,在核模糊C均值( KFCM)聚類算法的基礎(chǔ)上提出了一種
2017-12-15 10:52:531 均值濾波是典型的線性濾波算法,它是指在圖像上對(duì)目標(biāo)像素給一個(gè)模板,該模板包括了其周圍的臨近像素(以目標(biāo)像素為中心的周圍個(gè)像素,構(gòu)成一個(gè)濾波模板,即去掉目標(biāo)像素本身),再用模板中的全體像素的平均值來代替原來像素值。
2017-12-19 15:35:316372 針對(duì)固定空間和色彩帶寬的均值漂移分割算法無(wú)法解決的錯(cuò)分割問題,提出一種基于顯著性特征進(jìn)行密度修正的均值漂移分割算法。首先基于密度估計(jì)的主顏色量化結(jié)果計(jì)算區(qū)域視覺顯著性;其次,將區(qū)域視覺顯著性融合像素
2017-12-22 10:58:540 針對(duì)傳統(tǒng)非局部均值(NLM)濾波在噪聲標(biāo)準(zhǔn)差較大時(shí),加權(quán)歐氏距離不能真實(shí)反映鄰域塊相似度的問題,提出一種新的混合相似性權(quán)重的非局部均值去噪算法。首先,利用平穩(wěn)小波變換的特點(diǎn)對(duì)噪聲圖像進(jìn)行分解,并利用
2017-12-25 15:36:450 的局部分類器引入到骨肉瘤的數(shù)據(jù)分類中來,極大的提高了分類的自動(dòng)性以及效果。然而由于骨肉瘤數(shù)據(jù)可能存在稀疏、噪聲和非平衡等問題,如此算法的效果往往不佳。本文根據(jù)認(rèn)知的相對(duì)性規(guī)律提出了基于相對(duì)變換的局部均值分
2017-12-30 16:57:110 提出一種基于多通道聯(lián)合估計(jì)的非局部均值彩色圖像去噪方法,包括彩色通道聯(lián)合去噪和彩色通道融合去噪兩個(gè)步驟:在彩色通道聯(lián)合去噪步驟,采用經(jīng)典的彩色圖像非局部均值去噪算法對(duì)噪聲彩色圖像去噪,得到預(yù)去噪圖像
2018-02-27 16:02:372 針對(duì)經(jīng)驗(yàn)?zāi)B(tài)分解(EMD)方法處理非線性非穩(wěn)態(tài)信號(hào)的不足,提出了一種自適應(yīng)局部均值的EMD分解方法(ALMEMD)。該方法分析了信號(hào)極值點(diǎn)分布特性和均值曲線擬合對(duì)分解結(jié)果的影響,只使用一次樣條
2018-03-29 15:24:280 提出了一種實(shí)用的圖像濾波算法,即圖像加窗中值濾波算法。在分析經(jīng)典中值濾波算法基礎(chǔ)上,給出了加窗中值濾波算法的基本原理與實(shí)現(xiàn)過程,與經(jīng)典的鄰域均值濾波器、中值濾波器、Buttenvorth低通濾波器、Wiener濾波器進(jìn)行了濾波比較實(shí)驗(yàn),分別從主觀效果及客觀參數(shù)計(jì)算兩個(gè)方面驗(yàn)證了其優(yōu)良的濾波性能。
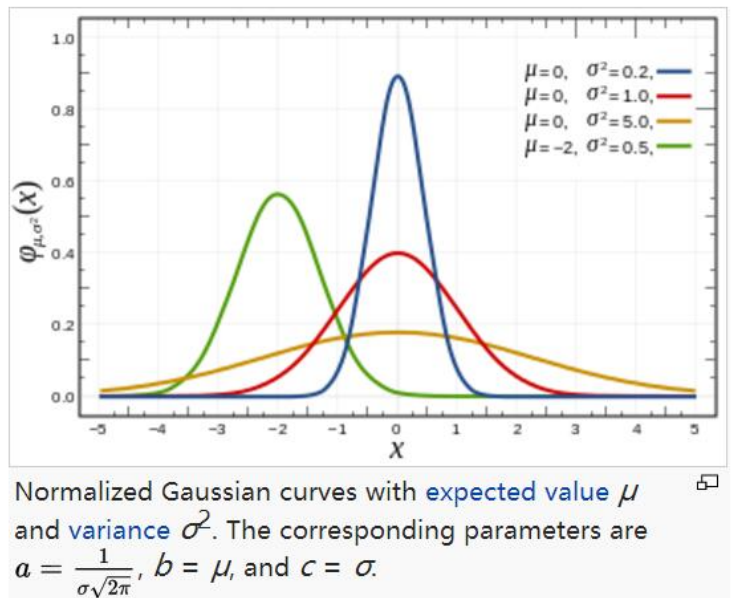
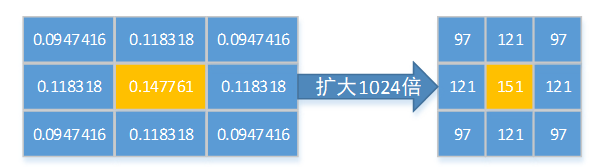
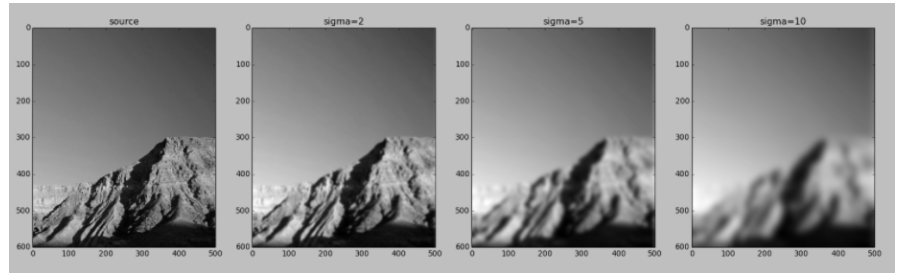
2018-11-30 11:11:224 高斯濾波器是一種線性濾波器,能夠有效的抑制噪聲,平滑圖像。其作用原理和均值濾波器類似,都是取濾波器窗口內(nèi)的像素的均值作為輸出。
2019-09-01 11:09:068336 
平均值濾波就是對(duì)多個(gè)采樣值進(jìn)行平均算法,這是消除隨機(jī)誤差最常用的方法。
2019-08-24 11:28:5137199 為增強(qiáng)水印算法的魯棒性并兼顧其虛警率和透明性,提出一種基于低頻奇異值均值的零水印算法。利用離散小波變換獲得載體圖像的穩(wěn)定低頻區(qū)域,釆用離散剪切波變換提取其中較優(yōu)尺度的低頻分量,從而構(gòu)造穩(wěn)定特征區(qū)域
2021-05-28 10:58:533 針對(duì)傳統(tǒng)相關(guān)濾波跟蹤器在目標(biāo)尺度變化和部分遮擋時(shí)效果不佳等問題,基于KCF提出了一種全局塊與局部塊協(xié)作的分塊跟蹤算法。該算法首先根據(jù)目標(biāo)的外觀特征,對(duì)跟蹤目標(biāo)進(jìn)行水平或垂直分抉,并分別訓(xùn)練兩個(gè)局部
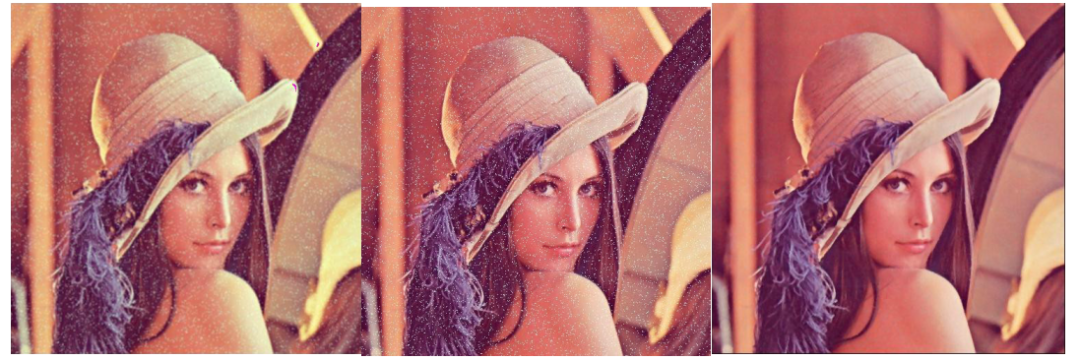
2021-05-28 16:44:192 ,對(duì)噪聲的抑制及邊緣的保護(hù)程度更好。本文重點(diǎn)介紹非局部平均濾波——NL-Menas的算法理論。” 01 — 理論分析 前面的文章中,我已經(jīng)講了幾種常見的2D濾波: 1)均值濾波:直接的加權(quán)平均,邊緣模糊; 2)高斯濾波:考慮像素權(quán)重的
2021-08-10 14:45:004333 
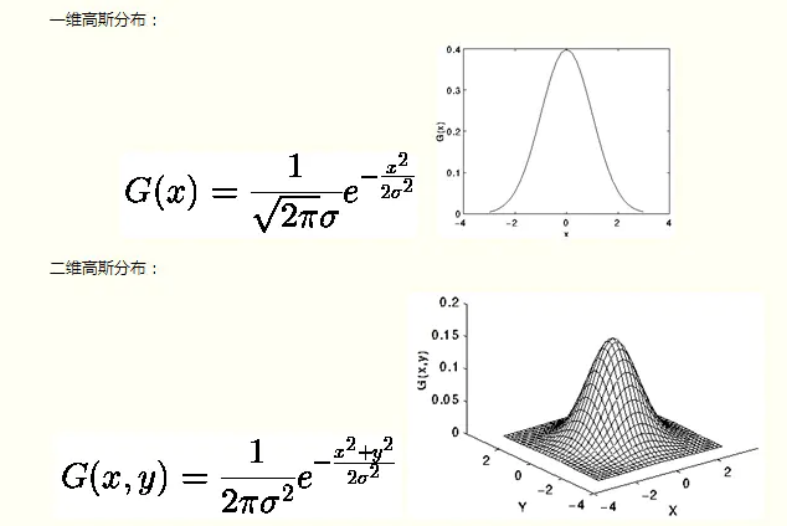
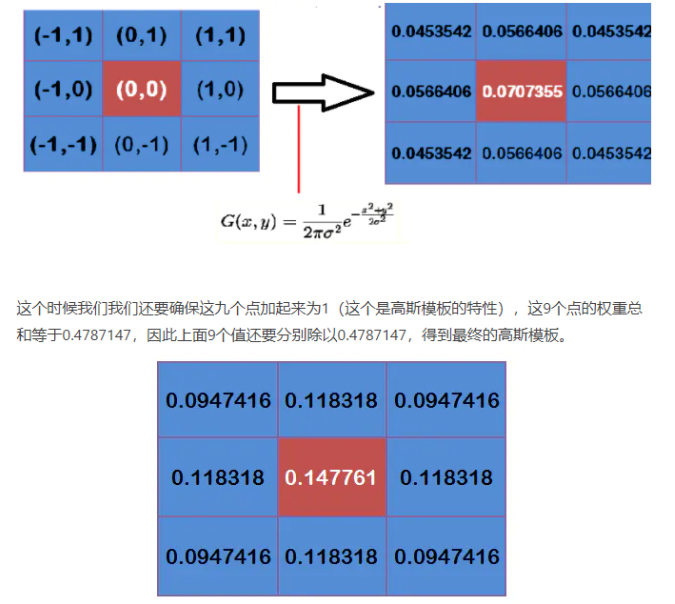
1.高斯濾波算法的實(shí)現(xiàn) 前面講的均值/中值濾波,對(duì)于濾波窗口內(nèi)每個(gè)像素的權(quán)重都是一樣的。但是噪聲在圖像當(dāng)中常表現(xiàn)為異常視覺效果的孤立像素點(diǎn)或像素塊,那么他必然不是平均分布。 這里先引入一個(gè)概念
2021-10-29 10:59:484904 模擬量輸入模塊uj‘能采集到緩慢變化的模擬量信號(hào)巾的干擾噪聲,這些噪聲往往以窄脈沖的方式出現(xiàn)。 為了減輕噪聲信號(hào)的影響,可以對(duì)連續(xù)若干次采集到的值取平均值,以平均值代替本段時(shí)刻的采集值。 plc
2021-12-22 11:34:541505 就要對(duì)模擬量信號(hào)進(jìn)行濾波,使其盡量消除現(xiàn)場(chǎng)的干擾,今天就給大家分享個(gè)模擬量濾波的FB塊,這個(gè)程序分為二種濾波位,一種是求全部采集到的模擬量的平均值 ,第二種是去除最大值 和最小值 再求平均值 ,二種
2022-11-14 09:53:483049 空間濾波器的調(diào)整取決于濾波器的類型,比如均值濾波器可以調(diào)整濾波器的大小,中值濾波器可以調(diào)整濾波器的大小和形狀,高斯濾波器可以調(diào)整濾波器的標(biāo)準(zhǔn)差,雙邊濾波器可以調(diào)整濾波器的半徑和標(biāo)準(zhǔn)差等。
2023-02-16 09:40:13668 
算法原理很簡(jiǎn)單,我們先介紹均值濾波,因?yàn)榫€性濾波的基礎(chǔ)是均值濾波,中值濾波是在這個(gè)基礎(chǔ)上發(fā)展過來的。
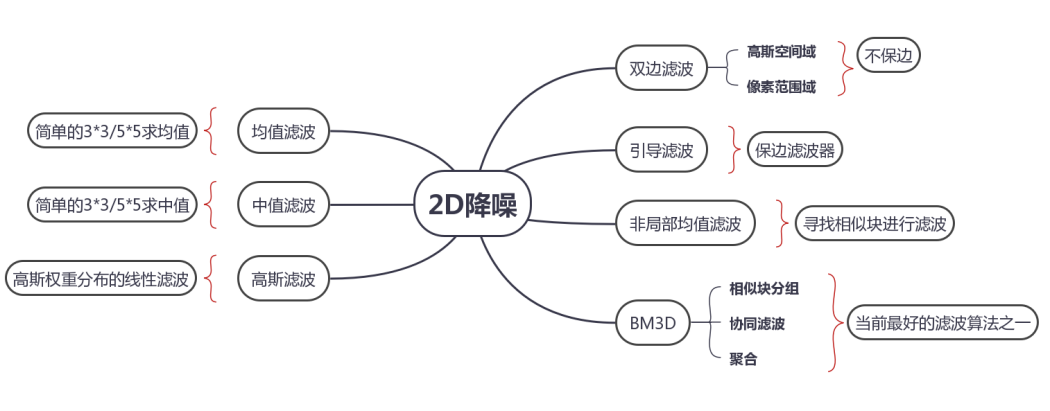
2023-04-10 09:03:19516 將再啰嗦一次,詳解從均值濾波到非局部均值濾波算法的原理及實(shí)現(xiàn)方式。 細(xì)數(shù)主要的2D降噪算法,如下圖所示,從最基本的均值濾波到相對(duì)最好的BM3D降噪,本文將盡量用最同屬的語(yǔ)言,詳解這些算法的實(shí)現(xiàn)流程,并給予一定的 FPGA 加速實(shí)現(xiàn)的實(shí)現(xiàn)
2023-12-19 16:30:02242
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論