Z-POSTMchainless是一套無線精確定位解決方案,彌補GPS定位無法在室內使用,移動通信基站定位精度不高造成的定位技術空缺。Z-POS基于上海順舟電子科技Zigbee無線網絡通過偵測AP
2018-01-11 07:33:00 8677
8677 在FPC上進行SMD貼裝, FPC的精確定位和固定是重點,固定好壞的關鍵是制作合適的載板
2018-04-16 08:48:5210529 為模糊化的偏差及偏差變化率;u表示模糊控制量,u*為標度變換前的精確量;K1、K2、K3皆為標度變換系數;r、y分別為輸入量和輸出量。
2021-01-24 10:36:002932 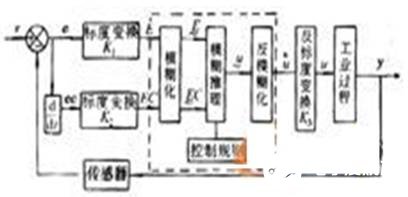
labview如何快速精確控制步進電機實現定位運動
2022-08-26 11:12:494306 
QR二維碼識別
2017-11-11 14:31:46
請問如圖設計模糊控制器,輸入三個隸屬度函數,想以隸屬度最大方法決定輸出值,輸出位離散的1,2,5三個值,為何輸出圖像沒有最后的5,去模糊化應選擇哪個方法?多謝!
2018-01-08 21:25:37
勻速升溫控制是個復雜的過程,具有大慣性、純滯后、非線性等特點,難以得到精確的數學模型。考慮到這些特點,為提高控制精度,本設計將Fuzzy PID算法應用于電阻爐溫度控制系統,當誤差較大時采用模糊控制
2019-05-30 10:38:57
一種模糊自適應PID控制方法https://bbs.elecfans.com/jishu_260252_1_1.html
2012-08-18 09:55:43
想請教一下有沒有精確測定兩者之間距離或者精確定位的方案啊?定位精度在1mm左右,測量范圍為5m左右。謝謝大家了!
2017-05-03 19:35:28
操作系統下,由于共享資源的存在,所以在程序的某些地方就會關閉中斷,這就使得精確的定時成了一個問題。這樣,在CUOSII下,AD采樣,定時器,這些要精確定時的任務的執行成了問題。這個問題有什么好的方法可以解決嗎?
2019-06-04 03:31:12
方法,也是業內第一家擁有UWB無線同步技術的廠家。當前,EHIGH恒高的時間測量精度已經達到ps級,基站與基站之間時間可達到高度同步,實現10cm精確定位。`
2020-03-19 17:06:43
本帖最后由 一只耳朵怪 于 2018-6-7 09:13 編輯
請問一下TI有相關的UWB芯片嗎。我有這個客戶正在做雞籠情況檢測的一個設備,用到一個UWB測距模塊,定位精度10cm。不過這個模塊價格太高,客戶想自己做。或者TI有沒有可以做精確定位功能的方案,精度10cm以內的?
2018-06-06 06:19:49
項目名稱:童車精確定位試用計劃:最近帶一項目:童車精確定位項目內容如題,童車利用GPS定位,用手機查詢或查看。看板子性能介紹,基本符合我們的題目內容:2G可以通訊或傳輸信息,GPS可以完成定位如果
2017-02-07 09:40:25
申請理由:在慣導中需要對慣導算法進行處理項目描述:基于公司原有的平臺實現慣導及精確定位;在實際的開發中,慣導需要對算法的精確處理,因此選擇DSP做該項目
2015-11-06 10:00:36
,解決內部參數攝動和外部負載擾動對系統影響的問題,提出一種永磁同步電機模糊自整定自適應積分反步控制方法。將dq軸電流誤差積分項引入自適應反步控制器控制律中,構成自適應電流誤差積分反步控制器,實現對dq軸電流給定的精確跟蹤,提高dq軸電流控制系統對內部參數攝動的魯棒性。在此基礎上,設計模糊推理模塊,應
2021-08-27 07:31:45
現在想控制超聲波傳感器的旋轉,要求可以精確定位,目前有兩個方案:1.方案1使用舵機來做,電路和控制很簡單,但問題是我手上9g的SG90的舵機轉起來的時候吱吱聲實在是難聽,哪位有靜音的舵機可以
2014-03-01 23:18:58
QR Decode to VirtualComPort提供在AT32微控制器上實現QR Decode應用程序的一般方法。
2023-10-19 07:03:04
摘要:恒流源在各種電子設備中的應用越來越多,其性能的好壞直接影響著整個設備的性能表現。為了充分利用智能控制方法提高使恒流源的性能,提出一種基于模糊控制的恒流源。本設計方案采用三星公司ARM9
2018-11-13 10:53:53
`基于Verilog的車牌精確定位一、概要針對車牌識別項目,車牌定位的準確與否直接影響到車牌字符的識別和提取。目前關于車牌定位的算法有很多種,其中比較成熟的有基于車牌邊緣特征提取車牌的算法、基于彩色
2019-03-03 17:36:23
施工技術、方法和設備需要不斷完善,人員安全管理也同樣不容忽視,畢竟人員安全是施工順利進行的前提。隧道精確定位不僅能幫助企業提升對作業人員的管理效率,同時可以保障人員的安全。 `
2018-10-24 17:54:38
我現在搞異步電機位置控制。請問高手,電機精確定位硬件上有什么特殊要求嗎?謝謝!我電機上接了碼盤,可是電機有慣性,發送停止命令,電機還要再轉一下才停。怎么解決?謝謝!
2018-11-22 10:04:51
怎樣使 STM 的永磁電機矢量控制精確定位?
2018-11-30 18:04:52
器和電流控制器。 注意:如下設計的模糊PID是針對速度控制器設計的,電流控制器采用PID。 模糊PID的結構模糊PID的設計步驟包括以下幾點:(有些難懂,可以跳過,下邊還會以圖的形式介紹)1)確定模糊控制
2016-02-01 10:25:56
這兩天的微信、momo、街旁啥的玩LBS概念都比較火熱了,但其實這個定位都相當不精確。現在我們的一個項目碰到了室內(超市內的購物導航)精確定位,這一下難住我們了。客戶要求能精確到至少3M左右,當然越
2014-11-28 14:21:58
遇到一個項目,可隨時手動調節速度和方向。(類似一個電位器)并且,可設置虛擬的限位點,在虛擬限位點處可以精確停止。 采用PWM和DIR的方式控制伺服驅動器,自己做了加速度曲線。上面說的第一個功能
2016-07-04 17:30:20
請問4G終端上網,有沒有辦法精確定位到其位置呢?如果有,還望說明下思路。
2015-12-02 06:06:38
請問在露天倉庫里對貨物進行精確定位采用什么樣的方案比較好?
2017-07-06 11:19:01
上料小車傳動電機(自帶編碼器)帶吸盤實現上料控制,小車軌道設置四個位置實現不同的控制要求。今天更換電機送電后小車無法實現精確定位,請問更換帶編碼器的電機后需要做哪些工作才能實現原來設定位置的精確控制。
哪位大師有編碼器實現位置控制的資料,能不能提供一些作為學習參考!!!謝謝!!!
2023-11-10 07:41:01
模糊系統與模糊控制教程共31章,內容包括模糊數學與模糊邏輯中一些對于模糊系統理論有用的概念和原理,模糊系統的各組成部分,設計模糊系統的四種方法,模糊控制與非自適
2009-01-14 22:40:48 0
0 文中將PID控制器在工程整定方法的基礎上,對 PID參數作歸一化處理,然后通過模糊控制規則和模糊推理確定對PID 的參數進行調節,提出了一種新型的模糊PID 算法。從而使 PID 控制器
2009-04-10 10:47:2227 提出一種不確定T-S模型的模糊滑模自適應控制方法。通過變換將該模型轉換成3個組成部分:線性標稱系統,已知非線性部分和未知不確定部分。針對它們設計3個控制器,其作用分別
2009-04-20 08:41:5018 對于不確定輸入的水箱液面控制問題,由于輸入的不確定性, 應用傳統的PID 控制方法很難達到理想的效果。 因此,實際應用中常采用模糊控制的算法。 本文介紹了一種基于模糊算
2009-05-30 09:21:3135 本文應用模糊控制對檔案回轉庫位置定位技術進行研究,詳細介紹了檔案回轉庫的定位過程和模糊控制器的設計。實驗結果表明,該模糊控制器比常規控制器具有更好的控制效
2009-06-06 14:47:1618 基于單總線通信協議串聯、每個節點擁有獨立ID號,可精確定位水浸變化的位置。標準數字單總線接口只占用MCU一個GPIO,可同時提供液體溫度信息,適用于家居、機房、樓宇、地下
2022-12-12 15:09:37
對精密工作臺的定位控制進行研究。提出一種參數自調整模糊控制的改進算法。該方法克服了常規模糊控制存在的靜差和振蕩問題。設計了模糊控制器的Simulink 模型,仿真實驗結果
2009-08-26 10:03:006 本文利用模糊邏輯連續滑模控制方法,研究了非線性Willis 混沌系統的受控問題。設計基于模糊邏輯的模糊控制器,通過隸屬函數將滑模面切換函數模糊化,再采用質心法解模糊控
2009-09-09 14:57:085 鏈篦機篦床溫度場是大慣量、非線性、純滯后的系統,其數學模型具有較大的不確定性;為實現其精確控制,結合模糊控制和PID 控制各自在動態響應和穩態精度上的優勢,提出了
2009-12-31 15:36:4921 使用步進電機精確定位(使用 S7-200、EM 253 POSITION 和 FM STEPDRIVE)小型自動化解決方案
2010-01-09 10:20:1258 文中將PID 控制器在工程整定方法的基礎上,對PID 參數作歸一化處理,然后通過模糊控制規則和模糊推理確定對PID 的參數進行調節,提出了一種新型的模糊PID 算法。從而使PID 控
2010-07-01 16:34:1558 為了在陰云天氣條件下也能快速獲得理想的GPS定位結果,設計了高精度精確定位系統。該系統基于瑞士u-blox公司最新出品的以u-blox5定位引擎為核心的LEA-5芯片,利用KickStart技術和SuperSens
2010-07-29 15:54:1732 精確定時1秒鐘閃燈
這一課,我們將學習如何精確定時1秒鐘閃燈。上節介紹過,要精確定時,必須使用自裝載方式。這里我們
2009-08-09 23:18:411876 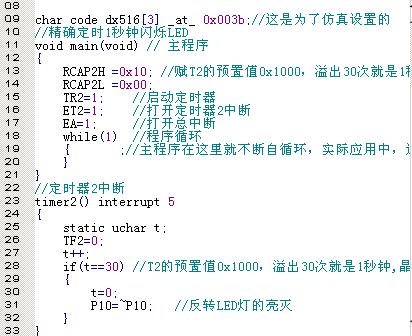
針對水下潛器實際工作的需求和水下沉浮運動特征,提出一種基于自適應模糊控制的水下潛器自主沉浮控制方法。該方法從優化隸屬函數入手,采用多層前向神經網絡的誤差反向傳播
2011-03-18 18:09:0528 該文將模糊控制中的可變論域思想和參數模糊自整定方法相結合,提出一種可變論域的模糊自整定控制方法,并將它成功應用在轉臺的速率控制中,為模糊控制在工程中的應用提供了一種新
2011-05-23 15:25:5616 文中針對實際要求,提出一種基于自適應模糊控制的水下潛器自動沉浮控制方法。由于模糊控制器的隸屬函數與模糊控制規則的選取對控制效果影響最大,該方法從優化隸屬函數入手
2011-06-10 10:19:111134 
本文旨在闡述利用PLC控制伺服電機實現準確定位的方法,介紹控制系統在設計與實施中需要認識與解決的若干問題,給出了控制系統參考方案及軟硬件結構的設計思路,對于工業生產中
2011-07-12 11:05:3692890 
針對 壓電陶瓷 器件在精密定位控制中存在的遲滯、蠕變和位移非線性等不足,將模糊控制和P ID控制相結合,根據各自的特點設計了模糊推理自校正P ID控制器. 該控制器通過模糊推理來實
2011-08-24 14:47:5341 在系統分析和研究船舶動力定位系統的基礎上,提出一種基于模糊預測控制的船舶動力定位的方法,設計了模糊預測控制器。首先,在預測控制部分,探討預測模型和反饋校正的設計;
2012-03-05 15:32:2731 本書針對具有模糊感知識和模糊位置等信息的不確定覆蓋和定位問題,探索一種新的模糊信息處理方法,從信息學角度出發,給出自組織網絡不確定信息的模糊度量,并研究其模糊幾何性質,為實現具有模糊信息覆蓋和定位問題提供有效的解決方案。
2016-04-01 16:07:062 本書針對具有模糊感知識和模糊位置等信息的不確定覆蓋和定位問題,探索一種新的模糊信息處理方法,從信息學角度出發,給出自組織網絡不確定信息的模糊度量,并研究其模糊幾何性質,為實現具有模糊信息覆蓋和定位問題提供有效的解決方案。
2016-04-01 16:08:241 基于模糊PID控制的步進電機定位系統-2005。
2016-04-05 16:31:3025 帶觸覺的肌電假手握力模糊控制方法_章華濤
2017-02-07 16:52:571 基于模糊PID控制器的控制方法研究_王述彥
2017-02-08 01:58:380 模糊控制中隸屬度函數的確定方法_王季方
2017-02-07 18:37:161 一類基于PID控制的新型模糊控制方法_張恩勤
2017-02-07 18:37:160 不確定T_S模糊時滯系統的魯棒H_控制_任偉建
2017-01-28 21:37:150 光伏組件熱斑診斷及模糊優化控制方法_吳春華
2017-01-28 21:37:150 一類自適應模糊控制方法研究及在鍋爐汽溫控制中的應用_胡一倩
2017-01-28 21:37:150 基于模糊理論與常規PID控制的模糊PID控制方法研究_趙笑笑
2017-01-31 15:22:448 基于機器視覺的智能電表識別與精確定位技術研究_歐習洋
2017-03-16 08:00:003 數據傳輸技術,研發了“基于精確定位的電廠安全管理系統”,實現對現場人員、車輛、重要物資以及施工作業的全方位可視化管理,將現場安全監控由“被動”變為“主動”,有效提升電廠安全管理水平。
2017-04-10 14:37:3310 上海北尋公司針對港口車輛精確定位管理使用高精度查分定位的解決方案
2017-08-10 16:07:1314 刻度標尺精確定位系統采用電磁感應原理來檢測移動設備的位移量,當游尺指針線圈中通入交變電流時,在游尺指針附近會產生交變磁場。刻度標尺近似處在一個交變的、均勻分布的磁場中,每對刻度標尺芯線會產生感應電動勢。
2017-08-29 15:18:3819 基于STM32的變頻器_編碼器精確定位控制系統設計
2017-09-28 12:02:0062 塔吊變幅和起升電機的轉速,從而得出小車的準確定位和吊物快速防擺。通過MATLAB仿真可以看出用此方法響應速度只用了14 s,系統具有較強的魯棒性。
2017-11-13 10:17:1313 針對現階段實現瞳孔精確定位算法過于繁瑣的問題,提出一種由粗略到精確的瞳孔精確定位算法.首先用灰度積分算法粗略找出人眼部位在人臉上的大概位置,然后用Hough變換定位出人眼瞳孔中心的精確位置,接著
2017-11-13 15:57:406 的精準室內定位方法,并應用于多種情形下的位置追蹤和感知.為了解決無線信號多徑效應和噪聲干擾對室內精確定位的影響提出了基于稀疏表示的CSI室內定位方法,利用CSI提供的頻率分集和多天線提供的空間分集,有效地減輕了多徑效應的影響
2018-01-04 16:15:572 AD中精確地移動元件,精確定位。
2018-02-06 16:36:5857169 
在日常工業生產當中,恒溫控制應用非常廣泛。模糊控制技術是通過模仿人的思維方法,運用不確定的模糊信息進行決策以實現最佳的控制效果。模糊控制所關心的是目標而不是精確的數學模型,即研究的是控制器的本身
2019-06-20 08:05:004913 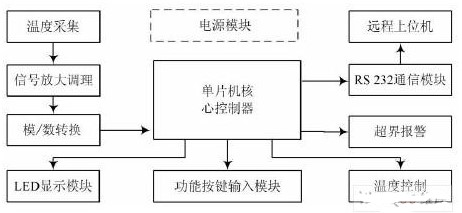
, 易于實現與上位機的信息交流與控制,從而精確定位。其內部全部采用表面貼片元件,不含任何移動元件,非常可靠和堅固, 且功耗低、體積小。同時羅盤帶有非鐵磁性金屬外殼,可以安裝固定在任何一個平臺上。隨著當前通信
2019-10-16 17:52:084532 華星智控智能定位手環標簽,融合了UWB室內精準定位技術和衛星定位技術,可以實現室內UWB技術的精確定位,定位精度高達10厘米,室內衛星定位定位精度5-10米。
2019-12-05 17:11:567680 時的應用場合,必須考慮它們的影響,以確保精確的定時控制。根據定時中斷的不同應用情況,應選擇不 同的精確定時編程方法。
2020-01-26 09:04:003692 
據外媒報道,當地時間3月2日,舊金山科技公司Swift Navigation宣布與德國電信(Deutsche Telekom)建立合作伙伴關系,雙方將把Swift公司的Skylark? Cloud Corrections(云校正)精確定位服務引入至德國電信的綜合通信基礎設施,提供最新精確定位產品。
2020-03-04 17:11:392780 導向式灰盒模糊測試是一種能夠快速對程序指定位置進行測試的技術。通過對當前導向式灰盒模糊測試技術導向不夠精確的問題進行分析,提岀一種新的導向式灰盒模糊測試方法,并引入基本塊權重與函數路徑長度的概念
2021-03-21 11:01:357 基于模糊C均值聚類的軟件多缺陷定位方法
2021-06-02 14:38:416 基于自適應模糊控制方法的噴桿位姿主動控制器
2021-07-01 16:11:077 人員安全是煤礦發展的基礎,一直以來煤礦人員安全管理以及井下人員定位管理都是煤礦企業亟需解決的問題。EHIGH恒高煤礦人員精確定位系統采用UWB定位技術,突破井下惡劣環境,通過定位引擎和定位設備的連接
2021-09-10 16:48:381204 在“雙碳”目標背景下,煤礦智能化是新時期煤炭高質量發展的必由之路,通過精確定位信息系統結合煤炭物聯網構建以UWB定位為基礎的煤礦人員精確定位系統,融合煤礦的數據鏈條構建,實現煤礦智能化發展,24小時
2021-09-28 09:07:051203 隨著煤礦礦井產能的不斷擴大,高精度人員定位系統在各大煤礦系統的運用也被納入了安全標準中,為了改善煤礦安全管理體系,提高煤礦生產運輸能力,EHIGH恒高基于UWB定位技術自研煤礦人員精確定位系統,通過
2021-09-28 09:10:15746 伴隨著現代化城市建設的不斷完善,利用地下綜合管廊可以有效的解決地下管線檢修避免事故發生,保障基本生活穩定供給,保障城市安全。為了實時掌握管廊的安全運行狀態,EHIGH恒高將UWB高精度定位技術應用于管廊的運維管理中,通過管廊人員精確定位解決地下管廊管理難的問題。
2022-01-13 18:11:35531 電子發燒友網站提供《有辨別力的精確定位器.zip》資料免費下載
2022-08-04 15:18:423 監獄人員UWB精確定位系統使用UWB室內定位技術,通過在監所內安裝定位基站,為犯人與預警佩戴標簽卡的形式,實現人員實時定位,精度可達厘米級。設置電子圍欄和視頻聯動功能,在關鍵出入口及周界布置禁入邊界
2022-09-27 09:37:212683 隧道精確定位方案以高精度定位系統為核心,集成UWB精確定位、門禁、視頻監控、LED大屏等子系統,滿足隧道施工安全風險監控管理要求,符合隧道施工安全管理標準,能夠輕松實現人車位置實時定位、歷史軌跡回放
2022-09-27 17:28:05842 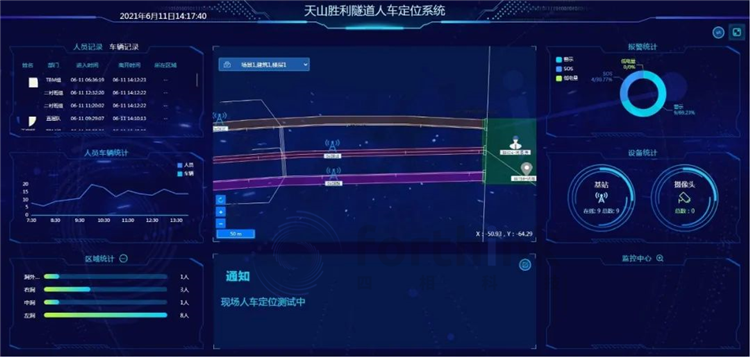
隧道人員定位,車輛定位系統,厘米級精確定位,防御隧道施工過程中的安全事故
2022-09-29 13:47:092537 確定 QR 系統的自由運行頻率
2022-11-14 21:07:591 模糊控制器是一種基于模糊邏輯的控制器,通過將輸入變量和輸出變量都表示為模糊量,并運用模糊推理來實現針對復雜系統的控制。與傳統的控制器相比,模糊控制器更加適合那些難以建模或者模型不精確的系統。
2023-03-17 18:12:182545 現在手上有一個三菱PLC fx5u和一臺三菱伺服MR-JE-A,以及導程為2mm的導軌,那如何精確控制伺服定位5mm。
2023-05-04 16:09:024652 
常用的隧道人員定位系統:區域定位、ZigBee 3米精確定位系統和UWB 30厘米精確定位系統,并比較它們的功能和區別。 【云南恩田智能】【區域定位】 區域定位是最基本、也是最常見的人員定位系統之一。它使用無線網絡或藍牙信號通過
2023-12-04 09:10:55289 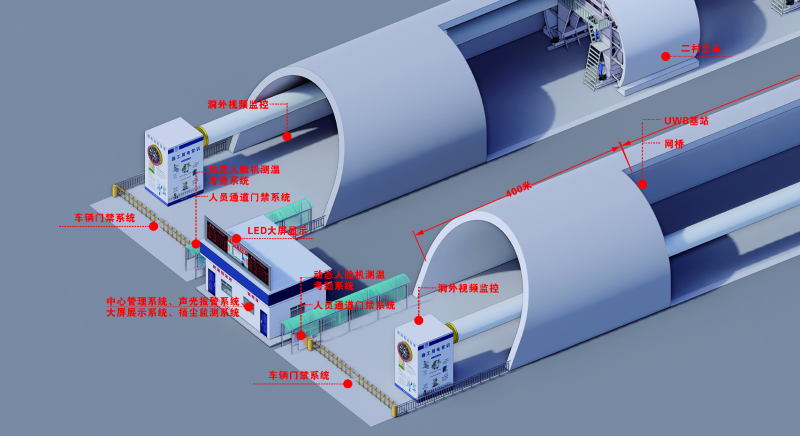
伺服電機的精確定位方法及分類簡介 伺服主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉1個脈沖對應的角度,從而實現位移,因為,伺服電機本身具備發出脈沖的功能,所以伺服電機每旋轉
2024-02-20 13:53:09124 
,這樣,和伺服電機接受的脈沖形成了呼應,或者叫閉環,如此一來,系統就會知道發了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉動,從而實現精確的定位,可以達到0.001mm。
2024-01-20 09:44:56345
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論