 電子發燒友App
電子發燒友App


ARM通用CPU及其開發平臺,是近年來較為流行的開發平臺之一,而由ARM+DSP的雙核體系結構,更有其獨特的功能特點:由ARM完成整個體系的控制和流程操作,由DSP完成具體的算法和計算處理。這樣,不但可以充分地發揮ARM方便的控制優勢,同時又能最大限度地發揮DSP的計算功能。這在業界已逐漸成為一種趨勢。
本文的FPGA的Demo驗證,是在基于一款DSP內核處理器的研發基礎上,對其功能進行驗證的一個小目標識別算法的實現。考慮到軟件環境仿真的速度以及仿真模型的局限性,用FPGA進行硬件協同驗證。這樣,既能夠保證仿真的真實性,又能夠快速發現實際問題,減少不必要的流片次數,加快開發的進程,這對于一個大規模的SoC設計,已經成為不可或缺的手段之一,而且對節約成本也有很大好處。
1 系統體系結構
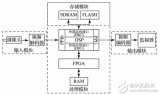
雙核系統的體系結構如圖1所示。

1.1 內嵌ARM內核的EPXA1芯片及其特點
圖1中,包含ARM922T內核的開發平臺選用的是Altera公司的excalibar系列,本驗證實現選用的型號是EPXA1。EPXA1是一款帶有100萬門可重配置PLD的ARM Core+PLD體系結構,可以通過quartus II軟件工具來靈活配置ARM Core同外部的端口連接,最大時鐘頻率能夠達到200MHz。EPXA1的高度集成化,不僅大大加快了ARM與片內各種資源的通訊速度,而且減小了硬件電路的復雜性、體積和功耗,真正實現了SOPC[1]。
1.2 FPGA硬件平臺及其特點
對于一個具體項目,FPGA芯片的選取要根據實際需求和特點來具體考慮。一般應從邏輯資源需求、易擴展能力、信號質量以及成本等因素來考慮。如圖1所示,本次設計采用的兩片FPGA分別為Xilinx公司的FPGA X3S5000和X2V6000,其容量分別為500萬門和600萬門。選用這兩塊芯片正是基于邏輯資源需求的考慮。FPGA X2V6000面向高端應用,存儲資源更多,功能更強大,適用于性能要求較高的DSP內核,但其成本相對也較高;而FPGA X3S5000成本較低,適用于一般性能要求的模塊。兩片FPGA都具備三個擴展槽,可做接口擴展,同時也能作為調試測試點用。
1.3 雙核體系結構設計特點
具體來講,整個體系結構是指通過人為設計電路圖,外部選用不同的FPGA器件來下載生成特定功能的外部硬件電路,在電路圖上對應相應的端口標號;同時,ARM Core可以通過quartus II工具方便地連接不同的端口標號,編譯運行生成相應的配置文件;ARM的啟動代碼中用以上的的配置文件信息來配置PLD,從而實現ARM同外部硬件電路即兩片FPGA的連接[3]。FPGA X3S5000中下載固化AHBC硬件電路以及外部SRAM Memory,而FPGA X2V6000中下載固化DSP Core以及支持AMBA協議的Wrapper。
這種體系結構能夠充分利用硬件資源,合理的版圖位置方便了ARM和DSP對外部SRAM的訪問,同時可快捷地實現ARM的控制功能,而且預留的擴展槽能夠較為方便地進行功能擴展和調試。DSP Core的Wrapper能夠快速響應ARM的控制請求,調動DSP Core進入不同的工作狀態。
2 系統工作流程及特點
系統工作流程圖如圖2所示,介紹如下。
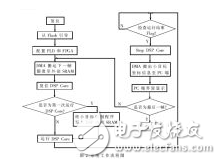
2.1 ARM負責準備階段
ARM從Flash中運行啟動代碼,通過配置PLD來連接FPGA X3S5000中的AHBC,目的在于ARM通過AHBC同FPGA X2V6000中的DSP Core進行交互。
代碼喚醒外部DMA通過以太網口從PC機端搬運第一幀待處理的圖像數據,放到雙核公用的外部SRAM memory既定的地址段中。然后,ARM Core通過AHBC控制FPGA X2V6000中的DSP Core。
這里需要說明兩點:
(1) FPGA開發板的的圖像傳輸是通過專門配置的帶有LXT972芯片的以太網口與PC機的以太網口進行交互, 如圖3所示。圖3左邊的以太網子板即圖1中的Ethernet模塊。

(2) DSP Core頂層的wrapper是支持AMBA協議的TOP Module,其中包括一個Debug Sub-Module。ARM就是通過讀寫Debug Sub-Module的控制寄存器來控制DSP Core的啟動、停止等工作狀態的。所以說,Debug Sub-Module是整個FPGA工程最為關鍵的部件之一,它直接關系到ARM和DSP之間的交互。本項目中,利用Debug Sub-Module實現對DSP Core的復位、啟動、暫停、斷點設置、單步運行、讀寫內部SRAM、讀DSP Core寄存器等一系列功能,大大方便了調試工作,同時也非常便捷地實現了ARM和DSP的交互運行。
2.2 DSP運行階段
ARM寫控制寄存器使DSP Core復位,并把小目標識別的程序代碼寫入DSP內部的SRAM0中等待DSP啟動運行,由ARM控制DSP Core運行起來。DSP Core運行完程序之后,會在外部SRAM的一個地址上返回一個標志數(0x00ff00ff),同時進入idle狀態,完全釋放對AHBC的操作。每隔一段時間,ARM檢查一下相應地址上的這個標志數,如果沒有,則表示程序還未運行完,ARM繼續檢查;如果有,則表示程序已經運行完畢,ARM將進入下一步操作。
選用這種流程有兩個特點:(1)ARM完全實現了控制和輔助的作用,而運行部分則完全由DSP負責,各自分工明確。(2)ARM和DSP實現了很好的交互,嚴謹地控制了流程的運行步驟。
2.3 ARM控制停止返回
ARM通過寫控制寄存器把DSP Core停下來,從外部SRAM的既定地址段中取出DSP Core運行完所返回的小目標的坐標信息,并通過以太網口返回到PC機端,在顯示界面的此幀圖像上顯示出小目標。圖4為其中一幀圖像的處理結果顯示。
ARM擦除DSP Core運行完畢的標志數,同時判斷當前處理完的圖像是否為最后一幀,如果不是,則流程跳回DMA搬運步驟去執行下一幀圖像,同時加上必要的控制,避免寫程序的重復執行;如果是,則結束整個程序運行。這樣循環下去,直到所有圖像序列處理完畢。
這個過程充分顯示了ARM在控制流程的判斷跳轉方面所起到的主要作用。由ARM的平臺來實現對整個視頻序列的最終處理控制過程,顯得非常清晰便捷。
3 體系架構的調試
3.1FPGA的選取
FPGA的選取一定要合適(這里主要針對容量而言)。以本開發過程為例, Xilinx的兩片FPGA(X2V6000和X3S5000)的容量分別為600萬門和500萬門左右,而項目的硬件代碼容量卻稍微超出了這個范圍,所以不得不對一些模塊作精簡和舍棄。即便如此,兩片FPGA的利用率都已大于90%。
一般來說,FPGA的利用率達到70%或多一些是比較好的,太高的利用率反而容易造成板子的不穩定。本開發過程就有一些不穩定因素,例如,因一些數據線、地址線的個別位傳輸值不正確,需要花大量的精力才能追查出這些存在問題的線路,然后更換Bonding連接,選用其他的通路。同時,所造成的不穩定因素也會影響下載代碼的運行速度。目前經過Xilinx的軟件工具ISE綜合出來的FPGA可下載代碼受時序約束,所能達到的速度上限為25MHz時鐘頻率。
容量大的FPGA的成本同樣也會比較高,所以在研發需要和成本之間必須找到一個比較好的平衡點,這在整個電路設計階段就要預測得比較好,但這不太容易做到,需要經驗的積累。
3.2觀測點的預留
開發板在設計電路圖階段,一定要預留出足夠的觀測點。這一點非常重要。因為:在后來的調試過程中,當出現問題時需要追查線路,而目前的FPGA調試軟件還不成熟,并不像RTL代碼前端仿真那樣方便,能夠把所有的信號都輸出到屏幕上觀看,而且FPGA調試時使用的邏輯分析儀只能夠測量觀測點的信號波形,如果觀測點不夠的話,當出現邏輯錯誤時,根本沒辦法追查下去,找不到問題的所在,或者需要做相當繁瑣的重復工作,才能把估計存在問題的線路節點信號連(Bonding)到僅有的觀測點上。如果經排查,估計得不正確或者需要進一步拉出更多的其他信號時,又需要重新花時間將節點新信號連到觀測點。這樣,會耗費非常多的時間和精力。因為對每一次新的節點生成一版新的FPGA下載代碼都很煩瑣。
所以,從電路的設計之初,預留出足夠的觀測點,盡量將更多的節點信號連到觀測點上。這樣將會極大地方便調試工作,加快整個研發進程。
3.3FPGA調試的原則
FPGA的調試應該按照由簡入繁的步驟進行。這樣可以方便研發人員快速地熟悉板子,并且容易定位問題的所在。
由于整個ARM+DSP體系結構是由ARM加上兩塊FPGA共同工作,相對比較復雜,相互之間交互性比較多。所以,在調試整個程序之前,可以先通過另外的小程序和硬件結構分別調通ARM對兩片FPGA的交互;然后,再用較為簡單的功能模塊調試好三塊片子的簡單交互功能;最后,把整個大程序應用在上面進行嘗試。這樣一步步下來,出現問題時,就比較容易發現問題所在,方便調試。
例如,可以先不考慮FPGA X2V6000,單獨調試ARM通過FPGA X3S5000中的AHBC對外部SRAM讀寫的控制,成功之后,再將FPGA X2V6000考慮進去,但先不考慮Debug模塊對DSP的控制,單獨將Debug模塊提取出來,下載到FPGA X2V6000當中;然后再調試ARM通過FPGA X3S5000中的AHBC對于FPGA X2V6000當中的Debug模塊的控制寄存器的讀寫情況等。
3.4軟硬件協同驗證
軟硬件協同驗證是較好的驗證方式(或調試方式),二者都是為了保證系統功能和結構正確的有效手段。在整個FPGA系統實現過程中,非常有必要結合前端軟件仿真波形來參照調試系統各個環節的功能運行情況,這樣可以大大簡化研發進程,有效地縮短調試周期。可以說,如果不結合前端軟件仿真波形來協同驗證的話,要想實現一個較為復雜的體系結構是非常困難的。
一般而言,對于這樣一個較為復雜的體系結構需要先進行前端RTL代碼的軟件仿真,因為前端仿真對于糾正RTL級代碼以及功能方面的錯誤是非常方便的,而且它所需要的驗證周期和糾錯難度比硬件的FPGA驗證要有利得多。但是FPGA硬件驗證,其真實性又是非常可靠的。所以驗證波形完全調試通過之后,可以非常有效地指導FPGA的實現。當FPGA在調試某項功能時出現了問題,可以通過邏輯分析儀將可疑端口節點出來的觀測點波形導出來對照軟件仿真波形來查找問題,這是一種非常有效的手段。
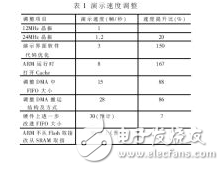
3.5Demo演示速度的調整
目前,開發板選用的晶振頻率為24MHz,穩定的演示版本速度能夠達到28幀/秒,為人眼所能接受的連續視頻速度,效果已經相當好。這是經過了各種調試才達到的效果。主要原因在于考慮比較周全:DMA在傳輸圖像序列的時候,所用到的FIFO在設計之初就考慮到了FPGA的容量和利用率,認識到其容量有限,在現有的FIFO容量下,要想調整到一個DMA與PC機雙方網口傳輸速度的精確狀態不太容易,如果運行速度太快,交互同步不準確,就會有丟包的現象發生;如果為了更方便的調試和達到更好的速度性能,可以選用更大容量的FPGA,設計更大容量的FIFO,這樣每一次圖像傳輸就可以傳送更多的圖像數據,減少DMA搬運的次數,傳輸雙方的交互過程較為容易控制。表1給出了從開始演示速度不理想到較為理想所做的調整過程。從表1中可以看出,單獨調整晶振頻率,速度提升并不明顯。這說明了速度瓶頸不在硬件代碼性能上,關鍵在于演示界面的軟件代碼、ARM的Cache打開與否以及圖像搬運的速度三方面。同時還可以看出Cache的打開對于速度影響很大,說明ARM的取指速度受到影響。目前ARM的運行指令是放在Flash中,如果改成從SRAM中取指,估計效果會更加理想。
從以上分析可見,ARM在整個設計中所起的主要作用是控制圖像的輸入輸出,以及循環控制DSP Core的運行停止等狀態;DSP Core的主要作用是處理運算應用程序,計算小目標識別程序。這樣既分工又合作,能夠充分發揮ARM的控制功能以及DSP Core的數字運算處理功能。
與此同時,由于ARM在整個設計當中主要起到一些輔助的控制作用,ARM922T的一些擴展DSP運算功能沒有用到,如果綜合考慮到成本和性價比等因素,可以考慮采用ARM7硬核、NIOS 或其他形式的軟核替代。









 工商網監
工商網監
評論