 電子發燒友App
電子發燒友App


0 引言
近年來,國際國內安全形勢不容樂觀,恐怖活動呈上升趨勢。因種種問題沖擊政府、軍隊、企業的事件逐年增多,其中就有恐怖分子利用汽車為作案工具攜帶爆炸裝置沖入目標單位引爆,造成傷亡的案例。如何才能對犯罪嫌疑車輛實施迅速有效的設卡攔截,給公安、武警提出了新的課題,提高智能攔截性已經是當務之急。通過調研發現,國內大多數營區的營門安防措施較為單一,防御車輛沖擊設備基本為減速帶、阻車釘等,而且阻車釘均為有線、或無線遙控式觸發。由于恐怖活動事發突然,汽車快速闖入營區,值守人員來不及做出反應,阻車釘不能在適當時機彈出。因此,為確保政府、軍隊、企業等目標單位安全,設計一種營區防沖擊系統,通過模擬線圈感應、車牌識別、車輛測速、系統控制、預警警告等技術使阻車釘自動彈出,可以對恐怖分子駕車沖擊營區實施有效的攔截。
1 系統實現框圖及各部分工作原理
1.1 智能營區防沖擊管理系統方案
政府、軍隊、企業等單位一般都設有車輛出入專用車道,且都有警衛人員,如圖1所示。
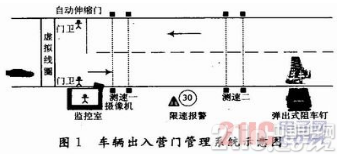
當車輛行駛至營門出入口處10 m,即圖1中的虛擬線圈感應區時,攝像機自動檢測車輛的車牌信息。其基本流程為:車輛是否為本單位車輛→阻車釘是否彈出。經判斷后,對出入營區的車輛分以下三種情況來處理:
(1)本單位車輛
當車輛到達虛擬線圈感應區時,系統即自動識別該車車牌,并判斷是否為本單位車輛,若是本單位車輛,系統清零,攝像機復位,測速設備不工作,系統處閑置狀態。
(2)臨時車輛
當車輛到達虛擬線圈感應區時,系統判斷非本單位車輛,自動抓拍,營區值班員招停,并作好信息登記后,向駕駛員發出慢速駛入營區指令。如果該車未聽指令加速行駛,系統設有兩道測速線,車輛駛過第一道測速線,若超過限速,系統迅速彈出立即減速警示牌并警鈴報警,提示駕駛員減速;車輛駛過第二道測速線,若未減速仍超過限速,阻車釘彈出,示為危險車輛。
(3)特殊車輛
特殊車輛包括軍車、警車、救護車等,營門值班人員可根據實際情況做出相應處理。
1.2 智能營區防沖擊系統的基本框圖
本文所論述的營區防沖擊系統理論上主要是基于FPGA和DSP系統設計的。利用FPGA來實現圖像及速度信號的采集與傳輸,系統的整體控制等操作。利用DSP的快速運算能力來實現車牌的識別。該系統的基本框圖如圖2所示。
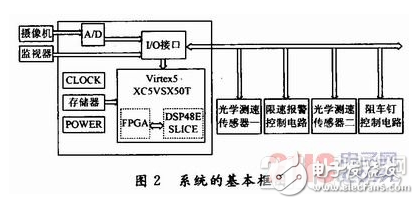
攝像機不斷地往視頻解碼芯片A/D里傳輸監控視頻流。當車輛經過觸發線時,觸發車輛檢測器,檢測器給FPGA一個檢測脈沖,觸發FPGA從視頻流中截取一幀圖像。FPGA緩存一行的圖像數據,行滿時利用中斷通知DSP獲取圖像。DSP利用EDMA從FPGA中獲取圖像數據,當接收完一幀的圖像數據后,以幀為單位,啟動算法開始對圖像進行處理。獲得結果被寫入FPGA中與存儲數據對比。測速信號由測速傳感器發送至FPGA中,在FPGA內部直接處理,后根據判斷結果,發出控制信號決定警報器是否報警或阻車釘是否彈出。
1.3 智能營區防沖擊系統的硬件平臺設計
目前,應用于模式識別、系統測速等設計方案大都采用兩片甚至更多微處理器的主從式結構,一片負責高速數據采集任務,一片負責完成復雜的信號處理,如FPGA+DSP、ARM+DSP等。本文主要涉及的關鍵技術有模擬線圈感應設計、車牌自動識別設計、汽車紅外光測速設計等,考慮到營門區車流量較小,數據處理流量不大,但系統模塊化程度高等特點,結合FPGA+DSP結構特點,采用了Xilinx公司Virtex 5系列的
XC5VSX50T芯片。如圖2所示。Virtex 5系列是第一個充分發揮了65 nm工藝性能、密度和成本優勢的FPGA系列產品,提供550 MHz DSP48ESl-ice邏輯片支持,內置有25×18MAC,能夠在資源使用率低于50 %的情況下實現單精度浮點運算。其特點是:速度等級更高、功耗更低、嵌入式處理器能力更強、DSP計算能力更大、簡化了外部接口設計、成本進一步降俯。因此根據既要完成系統控制和數據采集任務,也要完成復雜的信號處理的要求,該芯片達到系統需求,符合成本低、重量輕、功耗小等要求。
1.4 虛擬線圈感應設計
為提取車輛信息,防止移動目標混淆系統工作,產生錯誤判斷,采用一種虛擬線圈識別車型的方法。該方法將檢測線與虛擬線圈相結合,對提取的移動信息進行預處理,以觸發線檢測到達預先設置位置的移動目標,然后觸發虛擬線圈來提取移動目標特征,通過BP神經網絡來識別出是否為車,是車判斷“1”,系統進入下一步工作,不是車判斷“0”,系統復位,降低了系統出錯率,達到系統正常工作的目的。
觸發線是在圖像序列的適當位置設置一個平行條狀的線型,當有車輛進入觸發線時,通過當時觸發線位置的像素與相應背景圖像觸發線位置的像素比較,如果觸發線位置像素灰度值變化大于一定的閾值,就認為檢測到車輛到達檢測線的位置。如圖3所示。
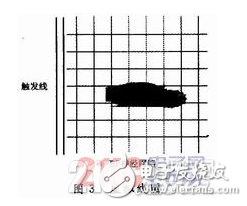
在圖3中,紅色方塊代表著虛擬線圈。虛擬線圈就是在圖像上設置一系列由N×N像素大小組成的方塊。由于車輛到達觸發線,觸發線檢測到2條黑色平行線間的像素變化,所以發出觸發信號。當接收到檢測線的觸發信號時,可通過當前幀與背景圖像的虛擬線圈位置的比較來判斷每個小線圈是否有車輛占據。如果大于一定閾值可判斷有車占據,并通過長、寬和面積可判斷出具體車型。
1.5 車牌自動識別設計
汽車牌照自動識別是該系統主要功能模塊之一。其功能是利用車牌是車輛身份的惟一標識的思想概念來智能識別和統計車輛。它主要采用先進的圖像處理、模式識別和人工智能技術,通過對車輛圖像的采集和處理,獲得車輛的數字化信息,以決定該車是否為本單位車輛。
車牌自動識別模塊由車牌圖像的捕獲,車牌識別,識別結果處理等部分組成。車牌圖像捕獲 主要是利用圖像采集裝置將攝像機所采集的圖像信息有效的傳輸至車牌識別系統內部,以便進行進一步的識別與處理。
車牌識別 是指當采集到的車牌圖像傳輸到處理器XC5VSX50T芯片的DSP48e處理模塊后,進行車牌的精確定位、濾波去噪處理、字符分割、字符識別等步驟,通過車牌識別模塊的核心識別算法來識別處車輛牌照的信息。如圖4所示。
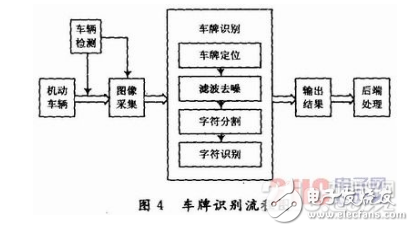
識別結果處理 識別結果由DSP發出后經過FPGA系統內部本單位車輛數據庫的對比,進行驗證。是本單位車輛,放行,系統復位;不是本單位車輛,進入下一步驟。
1.6 汽車紅外光測速設計
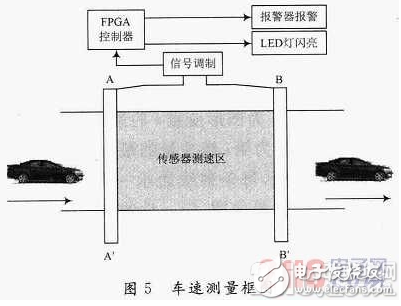
因雷達測速成本太高、線圈測速易老化和損壞,所以方案采用紅外光測速模式。測速模塊由4個紅外發光傳感器以及報警LED燈等系統構成,分別為A,B,C,D四組,AB為第一組測速,后接報警器及LED限速燈,CD為第二組測速,以AB組為例,如圖5所示。
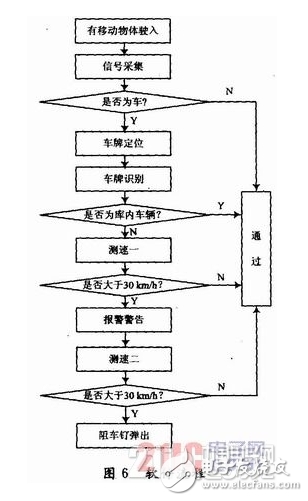
圖5中A,B兩點是路旁一側上的兩點,分別安裝著可發射38 kHz的紅外發光管,相應對面的兩點A’、B’處安放的光電接收器接收,共同組成一個光控測速區。當有車輛通過光控測速區時,A點發出的光線首先被阻斷,第一個光電探測器A-A’將光信號轉換為電信號送入信號調制電路,經過放大、整形,送至FPGA處理器。FPGA接到此觸發信號,打開內部計數器開始計數,時間t的值相應不斷增加。當汽車達到B點時,第二個光電探測器B-B’將光信號轉換為電信號經信號調制電路送至FPGA處理器使計數器停止計數,t的值就確定了。由A,B兩點間的距離S除以t便得到速度v。如果計算得到的v值在設定的安全速度范圍之內,LED限速燈、報警電路就不工作,如果車輛由B駛向A,即反向駛出,系統也不工作;如果v值超出設定范圍之外,則計算速度偏移量△v=Vmax-v,如果△v《“O”,則LED限速燈閃亮、報警電路啟動工作。
2 軟件流程
Xilinx提供了AccelDSP綜合工具,該工具基于Matlab高級語言開發Xilinx的DSP模塊,可自動完成浮點到定點的轉換,生成可綜合的VH-DL或Verilog代碼,并為驗證過程創建測試基準向量。軟件部分主要功能是完成數據采集、系統的控制以及圖像處理運算。系統軟件的執行流程如圖6所示。
3 結 論
本文提出了基于FPGA的智能營門防沖擊系統設計,并闡述了主要模塊的設計方法。經理論認證,該系統對防范恐怖分子沖擊營區有一定的作用,能夠克服突發情況下營門值守人員的慢反應,大大提高政府、部隊、企業營區的安全性。







 工商網監
工商網監
評論